
ポイント
○高速で移動するサービスロボットの障害物回避や経路計画に最適○電源電圧DC24V・消費電流150mA 以下
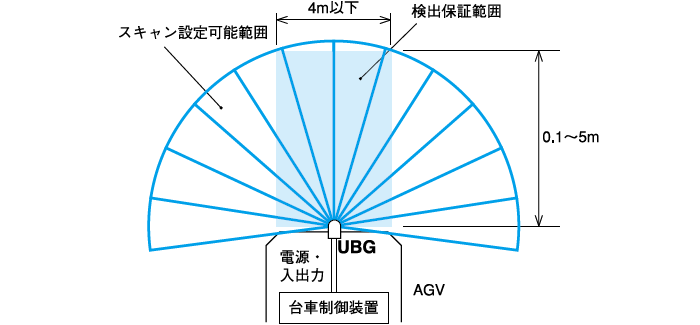
○測距範囲は、縦方向0.1~5m× 横幅4m、角度180°
○検出エリアの状況をリアルタイムに表示・確認
パソコン(RS-232C)の画面にて検出エリアの状況をリアルタイムで見ることができる
○最大31パターンの検出エリア切換えが可能
外部からのビット入力により、あらかじめパソコン操作で設定された検出エリアの切換えが可能
検出エリアはパソコンを使って自由に作成することができ、検出エリアごとに3 段階出力の検出距離を設定できる
| 主な用途 | ○工場内における無人搬送台車の前方障害物検出 |
|---|---|
| URL | http://www.hokuyo-aut.co.jp/search/single.php?serial=92 |
| 電源電圧 | DC24V(動作電圧範囲18~30V リップル10%以内) |
| 消費電流 | 150mA以下(但し起動時に突入電流約300mA必要、電源24V時) |
| 光源 | 半導体レーザ λ=785nm(FDA レーザ安全クラス1) |
| 検出範囲 | ○縦方向0.1~5m、横幅4mのエリア(原点はスキャン中心位置) ○ただしスキャン角度180°内 |
| 検出物体 | 白ケント紙125mm×125mm(センサ投・受光面に対して平行に設置) |
| 測距精度 | 検出距離が1mまでは±20mm、1m以上は検出距離の2% ※ 精度は出荷時の基準環境下による基準反射板による値です。 |
| 繰返し精度 | 検出距離が1mまでは±10mm ※ 精度は出荷時の基準環境下による基準反射板による値です。 |
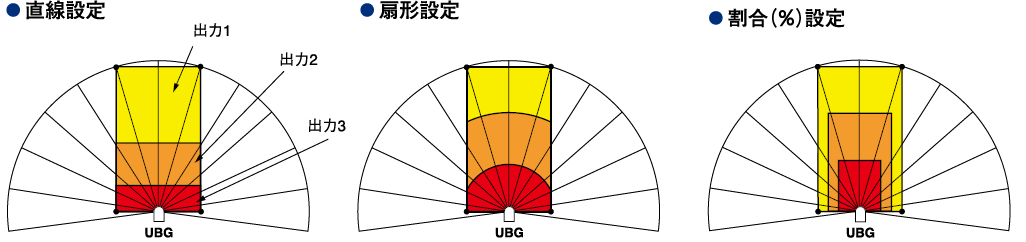
| 検出エリアの設定 | ○出力1:ポインタ最大7点で光軸方向に0~5mまで自由に作成可能 ○出力2・3:(1)正面方向に直線設定 (2)光軸方向に扇形設定 (3)割合%設定 の3種類にて設定可能 |
| 応差 | 検出距離の6.25% |
| 出力 | ○フォトカプラ・NPNオープンコレクタ出力(DC30V 50mA以下) ○出力1:エリア内検出で出力OFF ○出力2:エリア内検出で出力OFF ○出力3:エリア内検出で出力OFF ○出力4(故障出力):正常時出力ON ※故障出力が出ると出力1~3は検出物ありを示す状態になります。 |
| 出力応答時間 | 210ms以下(スキャン速度100ms/1回転) ※エリア切り換えを行うとき最大1スキャンの時間がさらに遅れます。 |
| 入力 | ○フォトカプラ入力(アノードコモン)の電圧範囲:DC18~30V ○検出エリア切り換え ○入力1・2・3・4・5でエリアナンバーの設定 ○入力1・2・3・4・5を全てONで発光停止(OFF:Hレベル入力、ON:Lレベル入力) |
| 入力応答時間 | 入力取込み周期:1スキャン時間(100ms) (ただし外部入力より発光停止状態選択時は入力取込み周期1msです。) |
| 起動時間 | 電源投入から10秒以内で動作(但し、起動状態によって超える場合があります。) |
| 表示灯 | ○電源表示灯(緑):起動時及び故障認識で点滅 ○出力1表示灯(橙):エリア内検出で点灯 ○出力2表示灯(橙):エリア内検出で点灯 ○出力3表示灯(橙):エリア内検出で点灯 |
| 接続 | ケーブル線引出し式1m |
| 使用周囲照度 | ハロゲン・水銀灯:10,000lx以下、蛍光灯:6,000lx(最大照度) ※太陽光など強い光を直接受けた場合は、誤出力する場合があります。 |
| 使用周囲 温度・湿度 | −10℃~+50℃、85%RH以下。但し、氷結・結露しないこと |
| 耐振動 | 10~55Hz 複振幅1.5mm X,Y,Z方向各2時間 |
| 耐衝撃 | 196m/s2 X,Y,Z方向各10回 |
企業情報
北陽電機株式会社
オートメーションという言葉がまだ一般に普及する以前から自動制御を手がけ、 顧客のニーズに応えていろいろな産業分野に役立つオンリーワンの商品を創出して参りました。 常に社会通念と価値観の変化に対応し...
〒 550-0002
大阪府大阪市西区江戸堀1-9-6 肥後橋ユニオンビル
測域センサ【エリア設定タイプ】へのお問い合わせ
*の項目は入力必須です。
お問い合わせ内容をご記入ください
