
| 主な用途 | ○コンテナ位置検出 港湾用クレーン運用にコンテナの位置を正確に検出 ○車両検知 道路または工場敷地内を走行する車両(トラック)などの検出用途等安全用途に適している 取得した距離データを用いて、渋滞検知・速度検知用途等にも使用が可能 ○地上レーザー計測 構造物や地形など、計測対象物の距離データが取得でき、道路・橋脚・文化財など地形の維持管理用に適用ができる |
|---|---|
| URL | http://www.hokuyo-aut.co.jp/search/single.php?serial=14 |
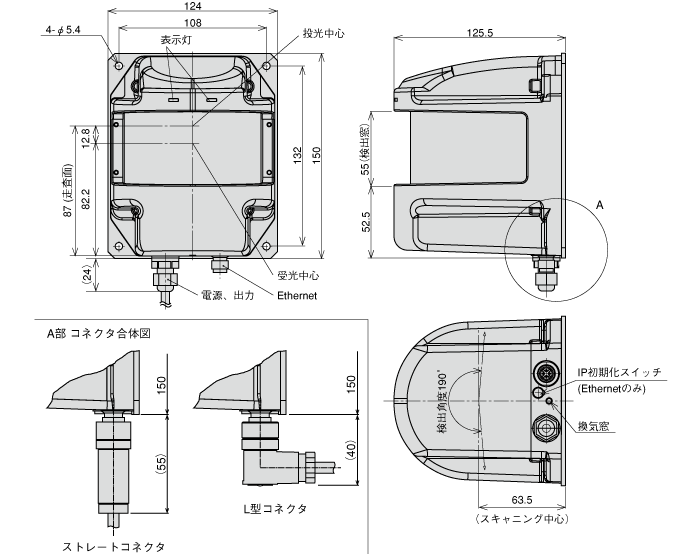
| オプション / アクセサリ | 通信用PC接続コネクタ 形式:UXM-30LX-EW用直形コネクタ/UXM-30LX-EW用L形コネクタ 通信に必要となるコネクタです。 本体には付属しておりませんので本体と一緒にご購入お願いいたします。 UXM-30LXH-EWA、UXM-30LAH-EWAと共通です。 |
| 品コード | UUXM008 |
| 電源電圧 | DC10~30V |
| 消費電流 | ○定常時:DC10/12V時 500mA以下、DC24V時 250mA以下 ○起動時:DC10V 2A以下、DC12V 1.5A以下、DC24V 0.75A以下 |
| 光源 | 半導体レーザ λ=905nm(レーザ安全クラス1) |
| 測距原理 | Time Of Flight(パルス式) |
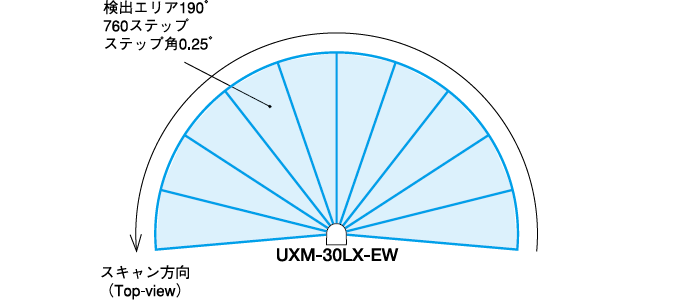
| 測距範囲 | ○検出保証値:0.1~30m※1(黒10%反射物 500mm□) ○最大検出距離:100m(出力限界値) 角度:190° ※環境の影響は実機での確認をお願いします。 |
| 検出物体 | 5m:65mm、10m:130mm、30m:400mm(いずれも距離における最小値) |
| 測距精度 | ○使用周囲照度3,000lx以下→0.1~10m:±50mm(500mm□以上、黒10%反射物) ○使用周囲照度100,000lx以下→0.1~30m:±100mm(500mm□以上、黒10%反射物) ※太陽光など強い光を受けた場合には検出距離や測距精度が落ちる場合があります。 |
| 角度分解能 | ステップ角:0.25°(360°/1,440分割) |
| 光軸径 | 10m:50×100mm、20m:100×150mm、30:150×200mm(W×H、参考値) |
| 走査時間 | 50ms/scan |
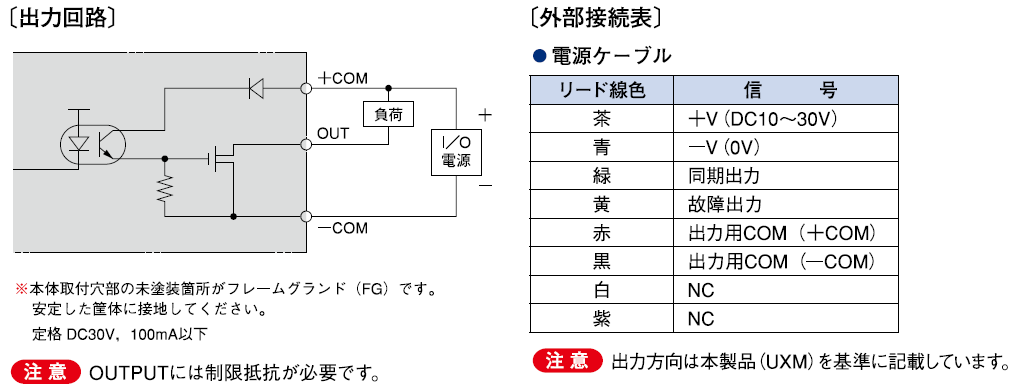
| インタフェース | ○イーサネット、100BASE-TX(Auto-negotiation)、TCP/IP ○故障出力、同期出力(Nchオープンドレイン出力 DC30V 100mA以下) |
| 通信仕様 | 専用コマンド(SCIP2.0) |
| 表示灯 | ○電源表示灯(緑):電源ON時点灯。動作/故障表示灯 ○(橙):正常動作時→点灯、故障時→点滅 |
| 接続 | ○電源・出力:ケーブル引出し式2m ○イーサネット:コネクタ(Binder 09-0431-87-04) ※ケーブル側プラグは、Binder 99-0430-57-04(別売)となります。 |
| 使用周囲温度 | −10~+50℃(保存時-25~+75℃)、但し結露・氷結しないこと |
| 使用周囲湿度 | 85%RH以下、但し結露・氷結しないこと |
| 耐振動 | 振幅幅1.5mm 10~55Hz X、Y、Z各方向 各2時間 |
| 耐衝撃 | 196m/s2 X、Y、Z各方向 各10回 |
企業情報
北陽電機株式会社
オートメーションという言葉がまだ一般に普及する以前から自動制御を手がけ、 顧客のニーズに応えていろいろな産業分野に役立つオンリーワンの商品を創出して参りました。 常に社会通念と価値観の変化に対応し...
〒 550-0002
大阪府大阪市西区江戸堀1-9-6 肥後橋ユニオンビル