
| 主な用途 | ○屋外におけるサービスロボットの環境認識 ○行動追跡によるマーケティング調査 |
|---|---|
| URL | http://www.hokuyo-aut.co.jp/search/single.php?serial=21 |
| 品コード | UUTM001 |
| 光源 | 半導体レーザ λ=905nm 、FDAレーザ安全クラス1 |
| 電源電圧 | DC 12V ±10% |
| 電源電流 | パワーON時 Max 1A 定常時 0.7A以下 |
| 消費電力 | 8W以下 |
| 検出距離及び検出体 | ○検出保障値0.1~30m(白ケント紙):最大検出距離 60m(出力限界値) ※室内環境にて(蛍光灯 1000lx以下) ○最小検出物 130mm(10m):距離により変動する |
| 測距精度 | ○0.1~10m:±30mm , 10~30m:±50mm (白ケント紙) ※室内環境にて(蛍光灯 1000lx以下) ○周囲照度3000lx以下 白ケント紙0.1~10m : ±30mm ※外光の直射時は検出が保障できません(西日等が入らないよう配慮願います) ○周囲照度100000lx以下 白ケント紙0.1~10m : ±50mm ※外光の直射時は検出が保障できません(西日等が入らないよう配慮願います) |
| 測距分解能及び繰返し精度 | ○1mm 単位 ○0.1~10m:σ<10mm , 10~30m:σ<30mm (白ケント紙) ※室内環境にて(蛍光灯 1000lx以下) 環境の影響は実機での確認をお願いします。雨等を検出しますので、信号処理で除去願います。 注)本製品は安全機器としてはご利用いただけません。 ○周囲照度 3000lx以下 :σ<10mm(白ケント紙 10mまで) ○周囲照度 100000lx以下 :σ<30mm(白ケント紙 10mまで) |
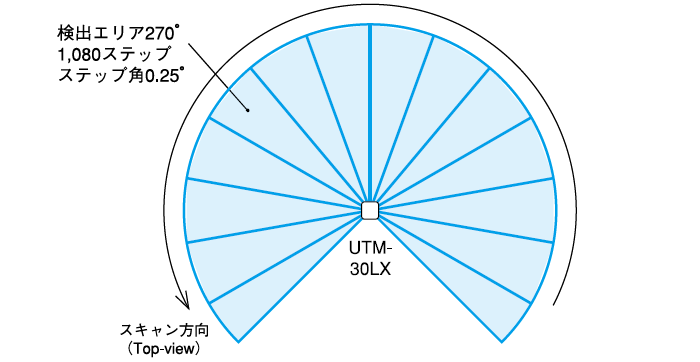
| 走査角度 | 270度 |
| 角度分解能 | 約0.25度 (360°/1440分割) |
| 走査時間 | 25ms(モータ回転数2400rpm) |
| インタフェース | USB Ver2.0 FSモード(12Mbps) |
| 出力 | OUTPUT1点 同期出力 |
| 表示灯 | ○電源表示灯(緑):電源ON時点灯 ○動作表示灯(赤):正常動作時点灯、故障時→点滅 |
| 使用周囲・温度・湿度 | ₋10℃~+50℃ 85%RH以下 (但し、結露、凍結がない事) |
| 保存温度 | ₋25~75℃ |
| 耐候性 | 雨や雪や太陽光により検出距離が短くなる※室内環境にて(蛍光灯 1000lx以下) 環境の影響は実機での確認をお願いします。雨等を検出しますので、信号処理で除去願います。 注)本製品は安全機器としてはご利用いただけません。 |
| 耐振動 | ○10~55Hz 複振幅1.5mm X.Y.Z方向 各2時間 ○55Hz~200Hz 49m/s2 スイープ2分 X,Y,Z方向 各1時間 |
| 耐衝撃 | 196m/s2 X.Y.Z方向 各10回 |
| 保護構造 | IP64 |
企業情報
北陽電機株式会社
オートメーションという言葉がまだ一般に普及する以前から自動制御を手がけ、 顧客のニーズに応えていろいろな産業分野に役立つオンリーワンの商品を創出して参りました。 常に社会通念と価値観の変化に対応し...
〒 550-0002
大阪府大阪市西区江戸堀1-9-6 肥後橋ユニオンビル