
HSR-048/055/065 の販売情報
製品概要
速く動き始める。速く動き続ける。正確に止まる。
■カタログからは読み切れない、本物の高速性を実現。
ロボットの性能は、カタログ値で読みきれないことがあります。
サイクルタイム内に収まるのか、本当に動かし続けられるのか、判断できないときがあります。
そうした課題を解決するために、「速く動き始める」「速く動き続ける」「正確に止まる」という現場が求め続けていたこの基本性能を極限まで追求し「本物の高速性」を実現したのが新型高速スカラロボット、HSR シリーズです。
高速性を追求した結果、従来の部品組立てから食品・医薬品・化粧品等のパッケージング工程においても小型・省スペースに高速ピッキングシステムを実現、現場に革新を起こします。
製品特長
新型高速スカラロボット“HSRシリーズ”
ハンバーグ 高速100個詰め(0:10頃~)
チョコレート 高速ピッキング
ペットボトル飲料 搬送・箱詰め
高速動作
クラス最高レベルの高速動作を実現。CPM (Cycle Per Minute=1 分間の仕事量)の向上により、高速かつ長時間の動作が可能。

連続稼働
長時間の連続稼働を実現。
ベース部の放熱性の向上により、実工程で求められる長時間の連続稼働を実現。

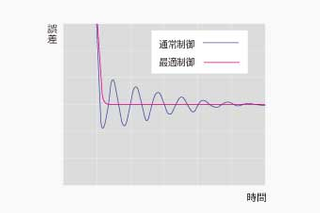
制振制御
アームの状態を動的に制御に反映することによってロボットを短時間で制振。
高速搬送時の振動や残留振動を抑え、サイクルタイムを短縮。
軽量化
設計、高剛性・軽量アーム。
高剛性と軽量化の両立により、高可搬(8kg)と高速動作を実現。
設置方向の自由度向上
シャフトの反転で設置方向をシフト可。床置きタイプ、天吊りタイプを選択可能。
(※取付タイプの変更の場合は、お問い合わせください。)

最適配置
大容量モータをベースユニットへ統合し、アーム先端の軽量化とアーム構造の最適化により、高速性を向上。

製品仕様
| アーム全長 | ■各タイプ共通[床置き:-N/天吊り:-S] HSR048A1-N/S*:205 (J1:第1アーム)+275 (J2:第2アーム)=480mm HSR055A1-N/S*:275 (J1:第1アーム)+275 (J2:第2アーム)=550mm HSR065A1-N/S*:375 (J1:第1アーム)+275 (J2:第2アーム)=650mm |
|---|---|
| 動作角度 および ストローク | ■各タイプ共通[床置き:-N/天吊り:-S] ±130° HSR048A1-N/S*:±143.5° HSR055A1-N/S*:±150° HSR065A1-N/S*:±150° ■標準タイプ[床置き:-N/天吊り:-S] HSR048A1-N/S*: *=10:100mm *=20:200mm *=32:320mm *=51:510mm HSR055A1-N/S*: *=10:100mm *=20:200mm *=32:320mm *=51:510mm HSR065A1-N/S*: *=10:100mm *=20:200mm *=32:320mm *=51:510mm ■ジャバラタイプ、防塵・防滴タイプ、クリーンタイプ、H1グリスタイプ[床置き:-N/天吊り:-S] HSR048A1-N/S*: *=17:170mm *=29:290mm HSR055A1-N/S*: *=17:170mm *=29:290mm HSR065A1-N/S*: *=17:170mm *=29:290mm ■各タイプ共通[床置き:-N/天吊り:-S] ±360° |
| 軸組合せ | ■各タイプ共通[床置き:-N/天吊り:-S] J1 (第1軸)+J2 (第2軸)+Z (第3軸)+T (第4軸) |
| 最大可搬質量 | ■各タイプ共通[床置き:-N/天吊り:-S] 8kg |
| 合成最大速度 | ■各タイプ共通[床置き:-N/天吊り:-S] HSR048A1-N/S*:7,540mm/s HSR055A1-N/S*:8,000mm/s HSR065A1-N/S*:8,850mm/s ■標準タイプ[床置き:-N/天吊り:-S] HSR048A1-N/S*: Z (第3軸): 100mm:1,700mm/s 200mm:2,300mm/s 320mm:2,475mm/s T (第4軸):2,500°/s HSR055A1-N/S*: Z (第3軸): 100mm:1,700mm/s 200mm:2,300mm/s 320mm:2,475mm/s T (第4軸):2,500°/s HSR065A1-N/S*: Z (第3軸): 100mm:1,700mm/s 200mm:2,300mm/s 320mm:2.475mm/s T(第4軸):2,500°/s ■ジャバラタイプ、防塵・防滴タイプ、クリーンタイプ[床置き:-N/天吊り:-S] HSR048A1-N/S*: Z (第3軸): 170mm:2,250mm/s 290mm:2,475mm/s T(第4軸):2,500°/s HSR055A1-N/S*: Z (第3軸): 170mm:2,250mm/s 290mm:2,475mm/s T (第4軸):2,500°/s HSR065A1-N/S*: Z (第3軸): 170mm:2,250mm/s 290mm:2,475mm/s T(第4軸):2,500°/s ■H1グリスタイプ[床置き:-N/天吊り:-S] HSR048A1-N/S*: Z (第3軸): 170mm:2,250mm/s 290mm:2,350mm/s T(第4軸):2,500°/s HSR055A1-N/S*: Z (第3軸): 170mm:2,250mm/s 290mm:2,350mm/s T (第4軸):2,500°/s HSR065A1-N/S*: Z (第3軸): 170mm:2,250mm/s 290mm:2,350mm/s T(第4軸):2,500°/s ■各タイプ共通[床置き:-N/天吊り:-S] ±360° |
| 位置繰返し精度 (周囲温度一定) | ■各タイプ共通[床置き:-N/天吊り:-S] HSR048A1-N/S*:±0.01mm HSR055A1-N/S*:±0.012mm HSR065A1-N/S*:±0.012mm |
| 最大圧入力 (下方向) | ■各タイプ共通[床置き:-N/天吊り:-S] 98N (1秒間以下) |
| 最大許容慣性モーメント | ■各タイプ共通[床置き:-N/天吊り:-S] 0.12kgm2 |
| 位置検出方式 | ■各タイプ共通[床置き:-N/天吊り:-S] アブソリュートエンコーダ |
| 駆動モータ、ブレーキ | ■各タイプ共通[床置き:-N/天吊り:-S] 全軸ACサーボモータ Z軸、T軸:ブレーキ付 |
| ブレーキ解除操作 | ■各タイプ共通[床置き:-N/天吊り:-S] 1.コントローラ電源ON時、ブレーキ解除スイッチONでブレーキ解除 2.TP、MP操作によるブレーキ解除 (UL仕様のロボットは不可) |
| ユーザ用エアー配管 | ■各タイプ共通[床置き:-N/天吊り:-S] 4系統 (φ4×2、φ6×2) |
| ユーザ用信号線 | ■各タイプ共通[床置き:-N/天吊り:-S] ・19芯 (近接センサー等の信号線) ・Ethernet(8)(*1) *1:オプション |
| エアー源 | ■各タイプ共通[床置き:-N/天吊り:-S] 0.05~0.35MPa 0.59MPa |
| 空気伝播騒音 (A加重等価持続音圧レベル) | ■各タイプ共通[床置き:-N/天吊り:-S] 80dB以下 |
| 保護等級 | ■標準タイプ、ジャバラタイプ[床置き:-N/天吊り:-S] IP20 ■防塵・防滴タイプ、H1グリスタイプ[床置き:-N/天吊り:-S] IP65 |
| クリーン度 (14644-1) | ■クリーンタイプ[床置き:-N/天吊り:-S] ISO 3(Use Point) |
| 質量(*2) | ■各タイプ共通[床置き:-N/天吊り:-S] HSR048A1-N/S*:約31 kg (約68.4 lb) HSR055A1-N/S*:約31.5 kg (約69.5 lb) HSR065A1-N/S*:約32 kg (約70.6 lb) *2:型式毎の値はネームプレートを参照 |
詳細情報
| メーカー | デンソーウェーブ |
|---|---|
| メーカー製品情報ページ | https://www.denso-wave.com/ja/robot/product/four/hsr.html |
| 登録カテゴリ |
このページのトップへ