このカタログをダウンロードして
すべてを見る



このカタログについて
| ドキュメント名 | Linear-Motion Telescopic Mechanism and Arm |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 2.9Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社川渕機械技術研究所 (この企業の取り扱いカタログ一覧) |

このカタログ(Linear-Motion Telescopic Mechanism and Arm)の内容
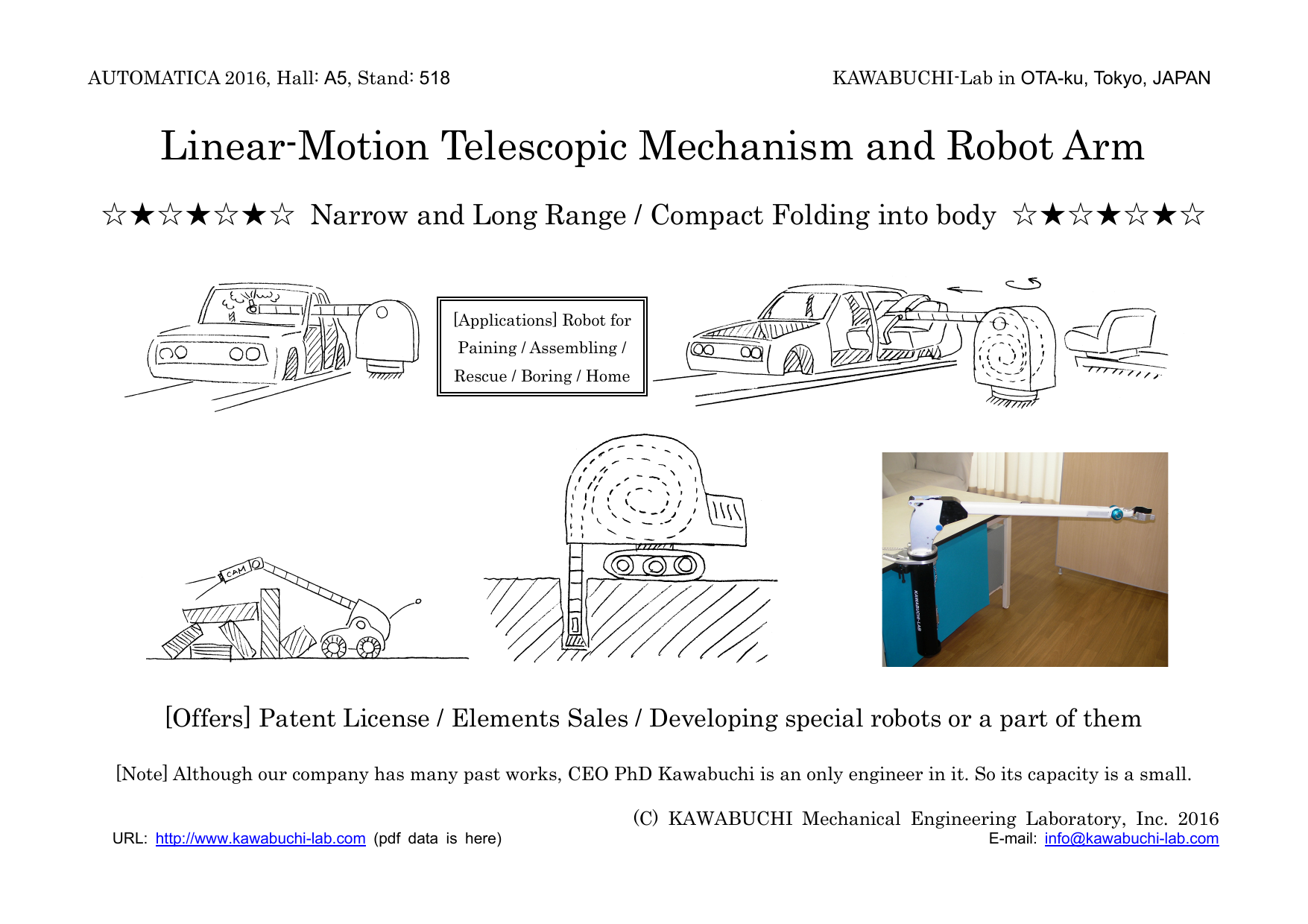
Page 1:AUTOMATICA 2016, Hall: A5, Stand: 518 KAWABUCHI-Lab in OTA-ku, Tokyo, JAPAN(C) KAWABUCHI Mechanical Engineering Laboratory, Inc. 2016URL: http://www.kawabuchi-lab.com (pdf data is here) E-mail: info@kawabuchi-lab.comLinear-Motion Telescopic Mechanism and Robot Arm☆★☆★☆★☆ Narrow and Long Range / Compact Folding into body ☆★☆★☆★☆[Applications] Robot forPaining / Assembling /Rescue / Boring / Home[Offers] Patent License / Elements Sales / Developing special robots or a part of them[Note] Although our company has many past works, CEO PhD Kawabuchi is an only engineer in it. So its capacity is a small.
Page
Page
Page 2:Principle Mechanism of the Linear-Motion Telescopic Mechanism➀Via: PCT/JP2009/006973(C) KAWABUCHI Mechanical Engineering Laboratory, Inc. 2016
Page 3:➁Key Parts(C) KAWABUCHI Mechanical Engineering Laboratory, Inc. 2016
Page 4:➂3 Steps to make a Rigid Bar(C) KAWABUCHI Mechanical Engineering Laboratory, Inc. 2016
Page 5:➃Driving Mechanism(C) KAWABUCHI Mechanical Engineering Laboratory, Inc. 2016
Page 6:Work ExamplesThe main object of our business is to provide order-made experimental equipments,machines and robots for universities and laboratories.Many of the Japanese engineers have excellent ability and technique to create, designand manufacture complicated machines, thanks to their exquisite sensibility, awareness ofdetails and dexterity of the hands.So, we have been dreamed of gathering these human resources; craftsmanship topromote design power to create tomorrow machines, and then starting to build a foundationwhere they can concentrate their hard works.We hope our company would help your study and development, and hopefully you couldhelp us by doing business together.Ver.1 (2001) Ver.2 (2003) Ver.4 (2011)Fig.1 Humanoid universal handsVer.1 (2001) Ver.2 (2003) Ver.3 (Siggraph 2006)Fig.2 Pneumatic humanoid arms1 (C) Kawabuchi-Lab, 2012(www.kawabuchi-lab.com)
Page 7:Fig.3 Exoskeleton master hand (2003)Fig.4 Master finger mechanism (2003)2 (C) Kawabuchi-Lab, 2012(www.kawabuchi-lab.com)
Page 8:Fig.5 Master arm for TELESAR II : master-slave system (Expo 2005)Fig.6 Humanoid robot for TELESAR V : master-slave system (Int. Robot Ex. 2011)Fig.7 Humanoid arm stand (2010)3 (C) Kawabuchi-Lab, 2012(www.kawabuchi-lab.com)
Page 9:Fig.8 Torso style robot camera (1999)Fig.9 Robot skeleton in the RobotPHONE (Siggraph 2001)Ver.3 (Siggraph 2002) Ver.4 (2004) Ver.5 (2005)Fig.10 The TWISTERs (Telexistence Wide-angle Immersive STEReoscope)4 (C) Kawabuchi-Lab, 2012(www.kawabuchi-lab.com)
Page 10:Fig.11 Wheeled rescue robot (2004)Fig.12 6 D.O.F. parallel manipulator (2001)Fig.14 Batting robot (Expo 2005)Fig.13 Massage chair robot (2004)5 (C) Kawabuchi-Lab, 2012(www.kawabuchi-lab.com)
Page 11:Fig.15 4 D.O.F. φ10 Robotic Forceps Tip (2007)Fig.16 Personal assistant robot arm w/linear expandable stem (2007)株式会社 川渕機械技術研究所KAWABUCHI Mechanical Engineering Laboratory, Inc.4-6-15-506 Ohmori-minami, Ota-ku, Tokyo, JapanURL : http://www.kawabuchi-lab.com/E-mail : info@kawabuchi-lab.com6 (C) Kawabuchi-Lab, 2012(www.kawabuchi-lab.com)