



このカタログについて
| ドキュメント名 | 人協働ロボット「COBOTTA」(2019年01月発行) |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 866.8Kb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社デンソーウェーブ (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page2
concept
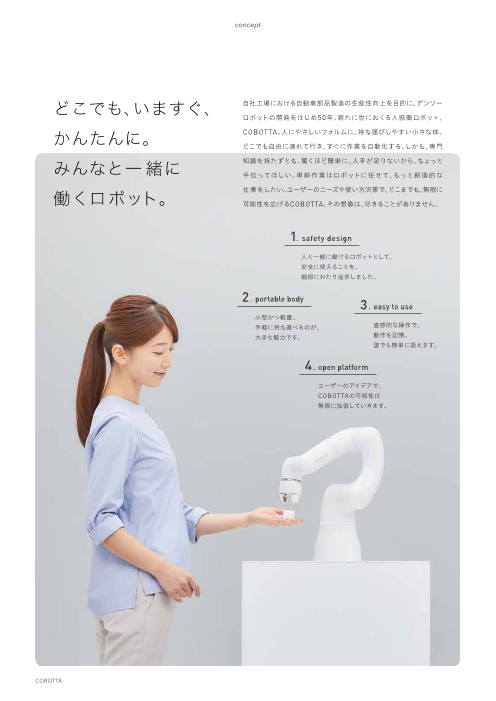
どこでも、いますぐ、 自社工場における自動車部品製造の生産性向上を目的に、デンソー
ロボットの開発をはじめ50年。新たに世におくる人協働ロボット、
かんたんに。 COBOTTA。人にやさしいフォルムに、持ち運びしやすい小さな体。どこでも自由に連れて行き、すぐに作業を自動化する。しかも、専門
みんなと一 緒に 知識を持たずとも、驚くほど簡単に。人手が足りないから、ちょっと手伝ってほしい。単純作業はロボットに任せて、もっと創造的な
仕事をしたい。ユーザーのニーズや使い方次第で、どこまでも、無限に
働くロボット。 可能性を広げるCOBOTTA。その想像は、尽きることがありません。
1. safety design
人と一緒に働けるロボットとして、
安全に使えることを、
細部にわたり追求しました。
2. portable body 3. easy to use
小型かつ軽量。
手軽に持ち運べるのが、 直感的な操作で、
大きな魅力です。 動作を記憶。
誰でも簡単に扱えます。
4. open platform
ユーザーのアイデアで、
COBOTTAの可能性は
無限に拡張していきます。
COBOTTA
Page3
safety design
portable body
1 safety design
かたちも
うごきも、
安 全に。
人と協働する存在として、その基本に求め
たこと。それは「人へのやさしさ」です。
鋭利な部分をつくらず、ユニークなアーム
構造に加え、指を挟み込まないよう可動
範囲も配慮。さらに、速度とトルクを監視
する6つのセンサーも内蔵し、機能的にも
安全です。
portable body
手の足りない 2
場 所に、
今すぐに。
コントローラーを内蔵しながらも、手軽に
持ち運べる約4kg。COBOTTAは、小型・
軽量なため、使いたいとき、使いたい場所
で、すぐに作業を始められます。手が足り
ないときはもちろん、アイデアをすぐに
実現したいとき、その小さな体が、とても
大きな魅力です。
Page4
easy to use
open platform
3 easy to use
覚えずに、
教えられる
簡単さ。
COBOTTAとの作業に、専門的な知識は
必要ありません。アーム部を直接動かして
動作を記憶させる「ダイレクトティーチング
機能」をはじめ、直感的に使えるGUIや、
カメラを用いたティーチング機能にも対応。
これまでロボットになじみがなかった方
でも、すぐに使えます。
4
open platform COBOTTAは、内蔵コントローラーを開放し、制御用APIを公開しているため、
クリエーターが自由な開発環境でオリジナルのアプリケーションを開発できます
(※OSS版)。JavaやRubyなど様々な開発言語に対応し、接続可能なデバイス
可能性は無限に、 も多種多様。プロの要望にも十分に応える拡張性の高さを備えています。
引き出せる。
Page5
example of use
その課題のそばに。
そのアイデアのそばに。
課題の最適な解決を求めているとき、 for laboratory
アイデアを実現する方法を模索して
いるとき、COBOTTAは、様々な場面で
私たちをサポートしてくれます。
工場での部品の仕分けや、医薬品研究
現場での正確な繰り返し作業、学校で
のプログラミングの授業など、発想次
第で、その活躍の仕方は無限に広がっ
ていきます。
for factory
for school
for office
and more ...
Page6
外形寸法・動作範囲(単位:mm)
340.3 270.58
102 177.5 °150
38.5 88
18°
5° 102 104 1309 Cable space
(140°) J6:±170°
Point P
0° 60
(R34 1
0 °
0.3)
R128.65
J4:±170°
Point P
.89
40
R3
Workable space
defind by point P Workable space
defind by point P
ツール取付面 ベース取付寸法 ハンド無し
φ 3XM4 深948H 4XM3 深5 126±0.05 45深 83 - 00 (P.C .D .25).039
23±0.05
φ3H7 +0.010 0 深4
.01
8
+0
0 +0.010 Point P
H7 2Xφ3H(7 0 )深5
φ1
6
深3
126
(135.64)
data
軸数 6軸(アーム部)+1軸(電動グリッパ部)*1
ブレーキ 1、2、3、4、5軸ブレーキ付
アーム長(第1アーム+第2アーム) 342.5(165+177.5)mm
定格可搬質量(最大可搬質量) 0.5kg(手首下向き時±10度以内の場合は0.7kg)*2
最大許容慣性モーメント J4:0.0065kgm2 J5:0.0040kgm2 J6:0.00025kgm2
位置繰返し精度 ±0.05mm*3
標準サイクルタイム 工場出荷時4.32sec、最大速度設定時1.6sec(水平200mm、垂直25mmの往復動作時間)
保護等級 IP30
ソフトウェア 標準版:COBOTTA専用ソフトウェア OSS版:なし(※お客様にてLinuxなどをインストール可能)
電源仕様(ACアダプター) 入力:単相AC100~240V±10%/47~63Hz
外部信号 専用入力:12点/専用出力:10点 汎用入力:8点/汎用出力:10点 外部非常停止用接続×1ch
外部通信 Ethernet×1回線、USB×2回線、VGA出力×1ch
環境条件(動作時) 温度0~40℃、湿度20~80%RH(結露なきこと)
本体質量 約4kg
安全仕様 標準版 ISO 10218-1:2011 ISO/TS 15066:2016 ISO 13849-1:2015 PL d Cat.3
(※第三者認証機関による認証取得予定) OSS版 ISO 13849-1:2015 PL d Cat.3
*1. オプション *2. 電動グリッパ無の場合 *3. 周囲温度一定条件下
option
COBOTTA手先Ethernetケーブル / AFカメラ*4 / COBOTTA用電動グリッパ / Mini I/Oケーブル / VGA中継ケーブル*5
*4. 使用時は、hubにPoE給電機能が必要 *5. OSS版を使用時に、COBOTTAの開発画面を表示する場合に使用
本製品は人・協働運転が実現可能な産業用ロボットです。ご使用に当たっては、関係法令・通達・指針、JIS B 9700:2013などに従い、リスクアセスメントを実施し、十分
リスクを低減した上でご使用ください。また、ご使用環境に必要な法令・規格への適合はお客様自身でご確認ください。
address
株式会社デンソーウェーブ ホームページアドレス https://www.denso-wave.com/ ●お求め、ご相談は…
営業企画 〒448-8661 愛知県刈谷市昭和町1丁目1番地 Tel 050-5213-4650
東北営業所 FA営業 〒983-0036 宮城県仙台市宮城野区苦竹2丁目6番1号 Tel 022-782-0071
株式会社デンソーセールス東北支社ビル 3階
東 京 支 店 FA営業 〒105-0011 東京都港区芝公園1丁目7番6号 CROSS PLACE浜松町 10階 Tel 03-6367-9788
中 部 支 店 FA営業 〒446-0058 愛知県安城市三河安城南町1丁目11番9号 4階 Tel 0566-75-7961
大 阪 支 店 FA営業 〒532-0003 大阪府大阪市淀川区宮原4丁目2番30号 株式会社デンソー大阪ビル 4階 Tel 06-7166-5030
広島営業所 FA営業 〒730-0025 広島県広島市中区東平塚町4丁目21番 株式会社デンソー広島ビル 7階 Tel 082-504-1108
福岡営業所 FA営業 〒812-0044 福岡県福岡市博多区千代4丁目1番33号 西鉄千代県庁口ビル 3階 Tel 092-643-6901
※COBOTTAは、株式会社デンソーの登録商標です。 Copyright© 2019 DENSO WAVE INCORPORATED All rights reserved.
P-CB6-J201901
(18°)
R177.91
108
180 (165)
91 26.56 345 12
30 (61) 520.3
64.5
(65.8)
(169.8)
20
(135.64)
(20)
150°
140°
135°
0)
(2
°)
(1
8