総
合
カ
タ
ロ
グ
thAnniversary of
Robot Development
www.densorobotics.com
D E N S O R o b o t i c s ®
5
6
軸
垂
直
多
関
節
ロ
ボ
ッ
ト
4
軸
水
平
多
人がひとらしく働く環境をつくり、生産性を追求する。人を中心に考えるデンソーの 関節
モノづくりの思想は、ロボットの開発の原点です。自社の製造現場、生産技術での ロボ
ッ
使用経験を製品開発に活かすことで、高性能で使いやすいロボットを生み出し ト
続けています。現在では、開発から50年を迎え、累計販売台数10万台となりました。 組
デンソーロボットはこれからも働き続けます。 込型
ロ
ボ
ッ
ト
工
程
1967 間搬送ロ
ボ
ッ
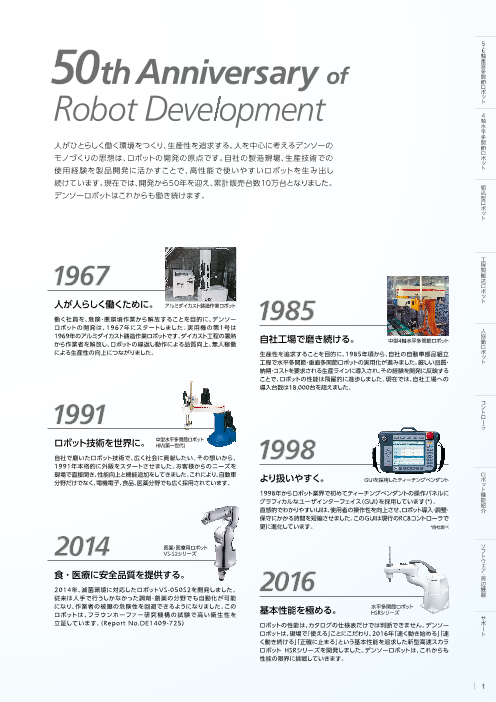
人が人らしく働くために。 トアルミダイカスト鋳造作業ロボット
働く社員を、危険・悪環境作業から解放することを目的に、デンソー� 1985
ロボットの開発は、1967年にスタートしました。実用機の第1号は 人
1969年のアルミダイカスト鋳造作業ロボットです。ダイカスト工程の暑熱 協
から作業者を解放し、ロボットの繰返し動作による品質向上、無人稼働 自社工場で磨き続ける。 中型4軸水平多関節ロボット 働ロ
による生産性の向上につながりました。 生産性を追求することを目的に、1985年頃から、自社の自動車部品組立� ボッ
工程で水平多関節・垂直多関節ロボットの実用化が進みました。厳しい品質・ ト
納期・コストを要求される生産ラインに導入され、その経験を開発に反映する
ことで、ロボットの性能は飛躍的に進歩しました。現在では、自社工場への
導入台数は18,000台を超えました。
コ
1991 ントロー
ラ
ロボット技術を世界に。 中型水平多関節ロボットHM(第一世代)
自社で磨いたロボット技術で、広く社会に貢献したい。その想いから、 1998
1991年本格的に外販をスタートさせました。お客様からのニーズを
現場で直接聞き、性能向上と機能追加をしてきました。これにより、自動車 ロ
分野だけでなく、電機電子、食品、医薬分野でも広く採用されています。 より扱いやすく。 � GUIを採用したティーチングペンダント ボッ
1998年からロボット業界で初めてティーチングペンダントの操作パネルに ト機
グラフィカルなユーザインターフェイス(GUI)を採用しています(*)。 能紹
直感的でわかりやすいUIは、使用者の操作性を向上させ、ロボット導入・調整・ 介
保守にかかる時間を短縮させました。このGUIは現行のRC8コントローラで
更に進化しています。� *自社調べ
2014 医薬・医療用ロボット ソVS-S2シリーズ フト
ウ
ェ
食・医療に安全品質を提供する。 ア・周
辺
2014年、滅菌環境に対応したロボットVS-050S2を開発しました。 2016 機
従来は人手で行うしかなかった調剤・創薬の分野でも自動化が可能 器
になり、作業者の被曝の危険性を回避できるようになりました。この 水平多関節ロボット
ロボットは、フラウンホーファー研究機構の試験で高い衛生性を 基本性能を極める。 HSRシリーズ サ
立証しています。(Report�No.DE1409-725) ロボットの性能は、カタログの仕様表だけでは判断できません。デンソー ポー
ロボットは、現場で「使える」ことにこだわり、2016年「速く動き始める「」速 ト
く動き続ける「」正確に止まる」という基本性能を追求した新型高速スカラ
ロボット�HSRシリーズを開発しました。デンソーロボットは、これからも�
性能の限界に挑戦していきます。
1
-
CONTENTS
06ロボット 5-6軸垂直 06 バリエーション一覧
多関節ロボット 08 VP シリーズ
10 VS シリーズ 特長 1 2 VS-050 / 060
1 4 VS-068 / 087
1 6 VS-6556 / 6577
18 VM シリーズ
医薬・医療用ロボット 20 VS-050S2 シリーズ 特長
もっと創造的な仕事をするために。 4軸水平 24 バリエーション一覧多関節ロボット 26 HSR® シリーズ特長
30 HS-A1 シリーズ
32 HM シリーズ
人手が足りないから、ちょっと手伝って欲しい。単純作業はロボットに
任せて、もっと創造的な仕事をしたい。ユーザのニーズや使い方
次第で、どこまでも、無限に可能性を広げる人協働ロボット。
それがCOBOTTAです。 組込型ロボット 34 XR シリーズ
工程間搬送 36 SC シリーズ
ロボット
人協働ロボット 38 COBOTTA®
42コントローラ 42 ロボットコントローラ 一覧
44 ロボットコントローラ 特長 44 RC8A/RC8
46 MC8A/MC8
47 IPC8
48 ロボットコントローラ 仕様 48 RC8A
50 RC8
52 MC8A/MC8
54 IPC8
56 ティーチングペンダント / ミニペンダント
57 機能紹介 5 7 外部軸制御 / 円形トラッキング / 高精度キャリブレーション(Hi-Cal)
58 付加軸制御 / コンベアトラッキング
59 カセンサ有コンプライアンス機能 / 協調制御
60 排他制御 / バーチャルフェンス / 外部TCP
61 Autofig / 高軌跡制御 / 特異点回避 / 衝突検出 / コンプライアンス機能
62 最適速度制御 / コマンド入力支援機能 / 暗号化機能 / ログ機能 / 操作盤機能
63 OPC連携 / コマンドスレーブ / b-CAP(通信プロトコル)
64 プロバイダ / コンテック製拡張ボード対応
65ソフトウェア・周辺機器 66 WINCAPS® Ⅲ68 ORiN® 2SDK
69 Robot Tools
70 RC Vision
7 1 EMU
72 VRC/Mobile Tools
73 オートハンドチェンジャー / バーコード ・ 2次元コード製品
74 3Dマシンビジョン
75 ネットワークカメラ
76 電動ハンド
78サポート 78 サポート ・ サービス
80 営業 ・ サービス拠点 / グローバルネットワーク
CONTENTS
06ロボット 5-6軸垂直 06 バリエーション一覧
多関節ロボット 08 VP シリーズ
10 VS シリーズ 特長 1 2 VS-050 / 060
1 4 VS-068 / 087
1 6 VS-6556 / 6577
18 VM シリーズ
医薬・医療用ロボット 20 VS-050S2 シリーズ 特長
もっと創造的な仕事をするために。 4軸水平 24 バリエーション一覧多関節ロボット 26 HSR® シリーズ特長
30 HS-A1 シリーズ
32 HM シリーズ
人手が足りないから、ちょっと手伝って欲しい。単純作業はロボットに
任せて、もっと創造的な仕事をしたい。ユーザのニーズや使い方
次第で、どこまでも、無限に可能性を広げる人協働ロボット。
それがCOBOTTAです。 組込型ロボット 34 XR シリーズ
工程間搬送 36 SC シリーズ
ロボット
人協働ロボット 38 COBOTTA®
42コントローラ 42 ロボットコントローラ 一覧
44 ロボットコントローラ 特長 44 RC8A/RC8
46 MC8A/MC8
47 IPC8
48 ロボットコントローラ 仕様 48 RC8A
50 RC8
52 MC8A/MC8
54 IPC8
56 ティーチングペンダント / ミニペンダント
57 機能紹介 5 7 外部軸制御 / 円形トラッキング / 高精度キャリブレーション(Hi-Cal)
58 付加軸制御 / コンベアトラッキング
59 カセンサ有コンプライアンス機能 / 協調制御
60 排他制御 / バーチャルフェンス / 外部TCP
61 Autofig / 高軌跡制御 / 特異点回避 / 衝突検出 / コンプライアンス機能
62 最適速度制御 / コマンド入力支援機能 / 暗号化機能 / ログ機能 / 操作盤機能
63 OPC連携 / コマンドスレーブ / b-CAP(通信プロトコル)
64 プロバイダ / コンテック製拡張ボード対応
65ソフトウェア・周辺機器 66 WINCAPS® Ⅲ68 ORiN® 2SDK
69 Robot Tools
70 RC Vision
7 1 EMU
72 VRC/Mobile Tools
73 オートハンドチェンジャー / バーコード ・ 2次元コード製品
74 3Dマシンビジョン
75 ネットワークカメラ
76 電動ハンド
78サポート 78 サポート ・ サービス
80 営業 ・ サービス拠点 / グローバルネットワーク
3
® 対応ロボットコントローラDENSO Robotics Lineup RC8A ▶P.48 RC8 ▶P.50
■ 5-6軸垂直多関節ロボット
VPSeries RC8A RC8 VS Series RC8A RC8
VP-5243 / 6242 VS-050 / 060 VS-068 / 087
▶P.08 ▶P.12 ▶P.14
最大リーチ 430・ 432 mm 505・ 605 mm 710・ 905 mm
最大可搬質量 3(*1)・ 2.5(*2) kg 4 kg 7 kg
位置繰返し精度(*3) ±0.02 mm ±0.02 mm ±0.02〜±0.03 mm
標準サイクルタイム(*4) 0.99 sec( 負荷1kg時) 0.35 sec( 負荷1kg時) 0.31・ 0.34 sec( 負荷1kg時)
● 標準タイプ ● 標準タイプ ● 耐悪環境タイプ(IP67) ● 標準タイプ ● 耐悪環境タイプ(IP67)
バリエーション ● 防塵防滴タイプ(手首: IP65 / 本体: IP54) ● 防塵防滴タイプ(手首: IP65 / 本体: IP54)
● クリーンタイプ(ISO クラス3/5) ● クリーンタイプ(ISO クラス3/5)
● UL仕様 ● UL仕様
■ 4軸水平多関節ロボット
HSR® Series RC8A HS-A1 Series RC8A HM Series RC8A RC8
HSR®-048 / 055 / 065 HS-035A1 / 045A1 / 055A1 HM-40*** / 4A***
▶P.26 ▶P.30 ▶P.32
アーム長 480・ 550・ 650 mm 350・ 450・ 5 50 mm 600・ 7 00・ 850・ 1,000 mm
上下ストローク 100・ 200・ 320 mm 100・ 150・ 200・ 320 mm 100・ 150・ 200・ 3 00・ 400 mm
最大可搬質量 8 kg 5 kg 10・ 20 kg
位置繰返し精度(*3) ±0.01〜±0.012 mm ±0.01 mm ±0.02〜±0.025 mm
標準サイクルタイム(*4) 0.28〜0.31 sec( 負荷2kg時) 0.29 sec( 負荷2kg時) 0.29〜0.31 sec( 負荷2kg時)
● 標準タイプ ● ジャバラタイプ ● 標準タイプ ● ジャバラタイプ ● 標準タイプ
バリエーション ● 防塵防滴タイプ(IP65) ● 防塵防滴タイプ(IP65) ● 防塵防滴タイプ(IP65)
● クリーンタイプ( ISO クラス3)(*8) ● UL仕様 ● クリーンタイプ( ISO クラス3) ● UL仕様 (*9)
● 天吊りタイプ ● H1グリスタイプ(IP65) ● UL仕様(*8) ● 天吊りタイプ(*8) ● 天吊りタイプ
*1: 手首下向き±45°を超える場合は最大可搬質量 2.5kg *2: 手首下向き±45°を超える場合は最大可搬質量 2kg *3: 位置繰返し精度(ツール取付面中心)は周囲温度一定時の精度です
*4: ロボットで高さ25mmまで物を持ち上げ、300mm離れた2点間を往復させるのに必要な時間です *5: 手首下向き±45°を超える場合は最大可搬質量 6kg
4
5
6
軸
垂
直
多
関
節
ロ
ボ
ッ
ト
VM Series RC8A RC8 医薬・医療用ロボット RC8A RC8 4軸
水
VS-6556 / 6577 VM-6083 / 60B1 VS-050S2 平多
関
節
ロ
ボ
ッ
ト
組
込
型
ロ
ボ
ッ
ト
工
程
▶P.16 ▶P.18 ▶P.20 間
搬
653・ 8 54 mm 1,021・ 1 ,298 mm 520 mm 送ロ
7 kg(*5) 13 kg(*6) 4 kg ボッ
±0.02〜±0.03 mm ±0.05〜±0.07 mm ±0.02 mm ト
0.49・ 0.59 sec( 負荷1kg時) 0.89・ 0.95 sec( 負荷5kg時) 0.35 sec( 負荷1kg時)
● 標準タイプ ● 標準タイプ ● 耐H2O2タイプ
● 防塵防滴タイプ(手首: IP65 / 本体: IP54) ● 防塵防滴タイプ(手首: IP65 / 本体: IP54) ● UL仕様 人
● クリーンタイプ(クラス10/100) ● クリーンタイプ(クラス100) 協
働
ロ
ボ
ッ
ト
■ 組込型ロボット ■ 工程間搬送ロボット ■ 人協働ロボット
XR ® Series RC8A RC8 SC Series RC8A RC8 COBOTTA コン
ト
ロ
XR-43*** SCL*** CVR038 ー
ラ
ロ
ボ
ッ
ト
機
能
紹
介
ソ
フ
▶P.34 ▶P.36 ▶P.38 トウ
ェ
アーム長 200・ 250・ 300 mm 1軸ストローク 600〜12,000 mm アーム長(第1アーム+第2アーム) 342.5(165+177.5) mm ア・
X軸ストローク 450・ 760・ 1060 mm 2軸ストローク 100・ 200・ 300・ 400 mm 周定格可搬質量 0.5kg(手首下向き時±10度以内の場 辺
最大可搬質量 5 kg 3軸ストローク 100・ 200・ 300・ 400 mm (最大可搬質量) 合は0.7kg)※電動グリッパ無の場合 機器
位置繰返し精度(*3) ±0.015 mm 4軸ストローク 100・ 200・ 300・ 400 mm 位置繰返し精度 ±0.05mm (*3)
標準サイクルタイム(*4) 0.56 sec( 負荷3kg時) 最大可搬質量 3 kg/S (*10)・ 5 kg/Z ● 標準タイプ
● 標準タイプ 位置繰返し精度(*3) ±0.02〜±0.05 mm ● OSS版 サ
バリエーション ポ
バリエーション ● 標準タイプ ー
バリエーション ト
*6: 11kgを超える場合はフランジ下向き±10°制限 *8: 床置きタイプのみ *9: 標準/防塵防滴タイプ
*10: Sストローク400の場合は2kg/S
5
-
5-6 AXIS ROBOTS
5-6軸垂直多関節ロボット
生産性を上げるための高速連続動作。
設備省スペース化のためのスリムボディ。
「VP「」VS「」VM」シリーズは、
その両方を実現します。
6 7
5
6
軸
垂
直
多
■ 主な性能 関節ロ
ボ
VP VS VM ット
製品名 6556(*7) 6577(*7) 050S2
5243 6242 050 060 068 087 医薬・ 6083 60B1 4
標準 ブレーキ付 標準 ブレーキ付( 医療用 ) 軸
水
平
最大リーチ 430mm 432mm 505mm 605mm 710mm 905mm 653mm 854mm 520mm 1,021mm 1,298mm 多関
節
ロ
ボ
最大可搬質量 3kg(*3) 2.5kg(*4) 4kg 7kg 7kg(*5) 4kg 13kg(*6) ッ
ト
標準サイクルタイム(*1) 0.99sec 0.35sec 0.31sec 0.34sec 0.49sec 0.59sec 0.35sec 0.89sec 0.95sec(負荷1kg時) (負荷1kg時) (負荷1kg時)(負荷1kg時) (負荷1kg時) (負荷1kg時) (負荷1kg時)(負荷5kg時)(負荷5kg時) 組込
型
ロ
位置繰返し精度(*2) ±0.02mm ±0.02mm ±0.02mm ±0.03mm ±0.02mm ±0.03mm ±0.02mm ±0.05mm ±0.07mm ボッ
ト
標準タイプ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ー ○ ○
耐悪環境タイプ
(IP67) ー ー ○ ○ ○ ○ ー ー ー ー ー ー ー 工
程
間
防塵防滴タイプ 搬
(手首IP65/本体IP54) ー ー ○ ○ ○ ○ ○ ○ ○ ○ ー ○ ○ 送ロ
ボ
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ット
クリーンタイプ ー ー ( ISO クラス3/5)( ISO )( ISO ISO クラス クラス クラス クラス ー クラス クラスクラス3/5 クラス3/5)(クラス3/5)(10/100)(10/100)(10/100)(10/100) ( 100 )( 100 )
UL仕様 ー ー ○ ○ ○ ○ ー ー ー ー ○ ー ー 人
協
働
ロ
耐H2O2タイプ ー ー ー ー ー ー ー ー ー ー ○ ー ー ボ
ッ
ト
*1: ロボットで高さ25mmまで物を持ち上げ、300mm離れた2点間を往復させるのに必要な時間です *2: 位置繰返し精度(ツール取付面中心)は周囲温度一定時の精度です
*3: 手首下向き±45°を超える場合は最大可搬質量 2.5kg *4: 手首下向き±45°を超える場合は最大可搬質量 2kg *5: 手首下向き±45°を超える場合は最大可搬質量 6kg
*6: 11kgを超える場合はフランジ下向き±10°制限 *7: 標準 J2〜J4 ブレーキ付/ブレーキ付 J2〜J6 ブレーキ付 *8: 全軸(1〜6軸)ブレーキ付
コ
ン
ト
ロ
ー
ラ
■ バリエーション一覧
標準タイプ 耐悪環境タイプ(IP67) 防塵防滴タイプ(手首IP65/本体IP54)
ロ
標準的な環境で、使われる 耐環境性を要する場所での 水滴や粉塵が飛散する作業 ボ
タイプです。 使用が可能で、水のかかる 環境に対応しており、手首部 ット
ような悪環境下での作業にも はIP65、本体部はIP54の 機能
適しています。(IP67相当) 防塵・防滴性を要します。 紹
加工機周辺の油・ミスト環境 介
でも使用可能です。
ソ
フ
ト
クリーンタイプ UL仕様 耐H2O2タイプ ウェ
ア・
周
辺
クリーンルームにおける生産 UL/cUL規格に準拠した仕様 H2O2ガス 35%濃度(ドライ/ 機
システムの自動化・省力化に です。 ウェット)、UV照射等による 器
適した仕様。クリーンルーム内 滅菌環境およびクリーン環境
での電子部品、食品、医療機 でご使用いただける耐滅菌性 サ
器関連作業に最適、高い密閉 を有します。 ポ
構造により発塵防止を実現し、 ート
高クリーン度と高性能を両立。
6 7
-
垂直多関節ロボット 対応ロボットコントローラ
VPシリーズ RC8A ▶P.48 RC8 ▶P.50
VP-5243 / 6242
可動スペースが限られている場所への設
置に最適です。デンソーロボットラインア
ップで最もコンパクトなシリーズです。
最大リーチ 430 ・ 432mm
最大可搬質量 2.5 ・ 3kg
標準サイクルタイム 0.99秒
位置繰返し精度 ±0.02mm
300 mm
標準サイクルタイム
ロボットで高さ25mmまで物を持ち
上げ、300mm離れた2点間を往復
させるのに必要な時間です
VP-6242
■ 仕様
項 目 仕 様
ロボット名 VP-5243 VP-6242
軸数 5 6
位置検出方式 アブソリュートエンコーダ
駆動モータ/ブレーキ 全軸ACサーボモータ / 全軸ブレーキ付
アーム全長(第1アーム+第2アーム) 430(210+220)mm 420(210+210)mm
アームオフセット J3(前腕) — 75mm
最大動作領域(P点) 430mm 432mm
J1(第1軸) ±160°
J2(第2軸) ±120°
J3(第3軸) +136°, −128° +160°, +19°
動作角度
J4(第4軸) — ±160°
J5(第5軸) ±120°
J6(第6軸) ±360°
最大可搬質量 3kg(手首下向き±45°以内()*3) 2.5kg(手首下向き±45°以内()*4)
J1 270deg/sec
J2 202.5deg/sec
J3 270deg/sec
速度
J4(*5) — 324deg/sec
J5 324deg/sec
J6 324deg/sec
標準サイクルタイム(*1) 0.99sec
位置繰返し精度(ツール取付面中心()*2) ±0.02mm
最大許容慣性モーメント J4,J5 0.04kg㎡(*5) 0.03kg㎡
(イナーシャ) J6 0.01kg㎡ 0.007kg㎡
ユーザ用エア配管 4系統(φ4×4)
ユーザ用信号線 9芯(近接センサ等の信号線)
常用圧力 0.10~0.39MPa
エア源
許容最大圧力 0.49MPa
空気伝播騒音(A加重等価持続音圧レベル) 80dB以下
質量 約13kg 約15kg
*1: 負荷1kg時、ロボットで高さ25mmまで物を持ち上げ、300mm離れた2点間を往復させるのに必要な時間です。 *2: 位置繰返し精度は周囲温度一定時の精度です。
*3: 手首下向き±45度を超える場合は最大可搬質量2.5kgです。 *4: 手首下向き±45度を超える場合は最大可搬質量2kgです。 *5: VP-5243には、J4がありません。
8
25 mm
■ 外形寸法および動作範囲 単位:mm
5
P点の動V作P範-囲5243 VP-6242 6軸
P点 垂直
70 220 多関
0°2 6° 節1 13 70 210 101 ロボ
P点Aの動作範囲 ッ
P点 ト
120 2
0°
70°
1 P点
220 4
20
°
1 36
°
189 A 軸1 R
A P点の動作範囲
水
120° 平
多
12
R01°62
関
15 節
R ロ
R189 148 ボ
2-M4 128°
ッ
ト
2
R162
R43
15 15
組
128° 2-M42-M4 71°
込
型
ロ
ボ
ッ
ト
160° 160° 工程
P点の動作範囲 P点の動作範囲 間搬
160° 送
ロ
P点の動作範囲 ボ
ッ
ト
2-M4 60 140 190
(ケーブルスペース) 2-M4P点 60 140 190P点 ケーブルスペース
2-M4 60 140 190 人
P点 (ケーブルスペース) 協
働
ロ
ボ
ッ
ト
コ
160° 160° ン
160° トロ
ー
ラ
■ ツール取付面詳細(矢視A) ■ ベース取付寸法〈上面〉
4-M5, 深 8 160
0 (P.C.D. 31.5)Ø40h8 135-0.039
2- Ø6H7 +0.0120 49 ± 0.05
ロ
4-Ø10 ボ
(基準穴) ッ
ト
機
能
+0.021 Ø5H7
+0.012
0
Ø20H7 紹0 深 7 介
深 6
R10 ソ
フ
ト
ウ
ェ
ア
■ 型式の見方 ・周
辺
機
器
V P - 2
サ
ポ
ロボット名: 軸数: 標準可搬質量: アーム全長: ート
VP: ミニ垂直多関節ロボット 5: 5軸 2: 2kg(6軸):2.5kg(5軸) 42: 420mm(6軸)
6: 6軸 43: 430mm(5軸)
※最大可搬質量は2.5kg(6軸)、3kg(5軸)
本ページに記載されているデータは標準タイプになります。
9
φ65
φ65
R2 R2 20 20
R430R430 120° 120°
26 26
R430 R430
155
182
155
280 182 210
280 210
144 ± 0.05 Ø65
R222
R432
120°
26
135 R70° 222160
155
182
280 210 75
-
°
12
0
R14
8
36°1 R22
0
° 0
136 R22
° 20°
128 1 ° 20°
128 1
621 62R R1
垂直多関節ロボット
VSシリーズ
VS-050 / 060 / 068 / 087 特長
より速く、よりコンパクト、より使いやすく。
クラス最高レベルの高速性能であり、
機能と美しさを追求したスリムデザインロボットです。
使いやすさを大幅に向上しています。
■ シリーズバリエーション
VS-050 VS-060 VS-068 VS-087
最大リーチ 505 mm 605 mm 710 mm 905 mm
最大可搬質量 4kg 4kg 7kg 7kg
■ ハイスピード=生産性UPの実現
VS-050 VS-068 ロボットで高さ25mmまで物を持ち上げ、300mm
離れた2点間を往復させるのに必要な時間です。
標準サイクルタイム
[sec] 0.35 0.31 300 mm
1kgの場合(実測)
標準サイクルタイム
■ コンパクトな設備に適応
アーム幅 / 手首幅 / 動作範囲
95mm 194mm 100mm 235mm
VS-050
VS-068
10 11
R505
R710
25 mm
対応ロボットコントローラ
RC8A ▶P.48 RC8 ▶P.50 5
6
軸
垂
直
多
関
節
ロ
ボ
ッ
■ 操作性&メンテナンス性向上 ト
4
軸
配線をフランジ先端まで 水カメラ 平
内蔵することにより 多関
配線の絡みや断線のリスクを解消 節ロ
(通信ケーブルフランジ仕様-A選択時) ボッ
電動ハンド ト
組
込
■ オプション 型ロ
ボ
ッ
ト
コネクタパネル フランジ 信号線・エア配管電磁弁 表面処理
エア配管電磁弁
工
程
間
信号線 搬送
コネクタパネル コネクタパネル 通信ケーブルフランジ仕様-A 標準タイプ クリーン、IP54 IP67 ロボ
背面仕様 底面仕様 ッ
ト
本体に接続する各ケーブル フランジ 部 に 信 号 線 及 び セカンドアーム上部に信号 耐悪環境タイプ(IP67)を選択頂
(本体間ケーブル等)の取付 Ethernetコネクタを装備し、 線・エア配管電磁弁を内蔵し いた場合、塗装レスとなります。
方向を2種類から選択できま 配線をロボット本体に内蔵して ています。VS-068/087は3 IP67を選択頂き、標準タイプの
す。ロボット設置状況により自 います。 種、VS-050/060は1種より選 塗装をご希望の場合は特殊仕様 人協
由に選択できます。 択できます。 (オプション)となります。 働ロ
ボ
ッ
■ ユーザーオプション ト
外付けバッテリユニット ブレーキ解除ユニット エアパージユニット セカンドアームカバー(R タップ穴付)
コ
ン
ト
ロ
ー
ラ
エンコーダバックアップ電池 各軸のブレーキを解除する 耐悪環境タイプ(IP67)のロボ ロボットセカンドアームに配
をロボット外部に設置できま スイッチです。(このスイッチ ット内部にエア圧をかけ、保 線固定用タップ穴がついた
す。電池の交換が容易になり、 の配線は各軸のブレーキ解除 護等級(IP67)を保持します。 カバーです。
メンテナンス性が向上します。 信号に直結されます。)
ロ
ボ
ッ
ト
機
品名 VS-050 / 060 VS-068 / 087 能紹
カテゴリ 介
仕様・タイプ 標準 耐悪環境
防塵防滴 クリーン クリーン 防塵防滴 クリーン クリーン
(IP67)(手首 :IP65)( IS O )( IS O ) 標準 耐悪環境(IP67)(手首 :IP65)( ISO ISO 本体:IP54 クラス5 クラス3 本体:IP54 クラ ス5)(クラ ス3)
コネクタ コネクタパネル背面仕様 ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
パネル コネクタパネル底面仕様 ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ソ
標準フランジ仕様 ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ フ
フランジ ト
通信ケーブルフランジ仕様-A ○ — ― ― ― ○ ― ― ― ― ウ
ェ
2ポジション、ダブルソレノイド ×2 ○ ○ ○ ○ ○ ― ― ― ― ― ア・
信号線・ 2ポジション、ダブルソレノイド ×3 — — ― ― ― ○ ○ ○ ○ ○ 周
エア配管 辺
電磁弁 3ポジション、エキゾーストセンター ×3 — — ― ― ― ○ ○ ○ ○ ○ 機
器
3ポジション、クローズドセンター ×3 — — ― ― ― ○ ○ ○ ○ ○
エアパージユニット ― ○ ― ― ― ― ○(*3) ― ― ―
ブレーキ解除ユニット(*1) ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ サ
ユーザ
オプション 外付けバッテリユニット ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
ポ
ー
本体間ケーブルアングル仕様 ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ト
セカンドアームカバーR(タップ穴付()*2) ○ ― ― ― ― ○ ― ― ― ―
*1: ブレーキ解除ユニットはロボットとの接続部IP67、本体IP54
*2: このカバーは耐悪環境タイプ、防塵防滴タイプ、クリーンタイプには出荷時に装着済みです。
標準タイプにはオプションとなります。
*3: IP67保持のためには、エアパージユニットが必要です。
10 11
-
垂直多関節ロボット 対応ロボットコントローラ
VSシリーズ RC8A ▶P.48 RC8 ▶P.50
VS-050 / 060
コンパクトなボディに抜群のパワーとスピ
ードを備えています。小物部品の組立・搬
送工程の自動化に貢献できます。
最大リーチ 最大505 ・ 605mm
最大可搬質量 4kg
標準サイクルタイム 0.35秒
位置繰返し精度 ±0.02mm
300 mm
標準サイクルタイム
ロボットで高さ25mmまで物を持ち
上げ、300mm離れた2点間を往復 VS-060
させるのに必要な時間です
■ 仕様
項 目 仕 様
ロボット名 VS-050 VS-060
軸数 6
位置検出方式 アブソリュートエンコーダ
駆動モータ/ブレーキ 全軸ACサーボモータ / 全軸ブレーキ付
アーム全長(第1アーム+第2アーム) 505(250+255)mm 605(305+300)mm
最大動作領域(P点) 505mm 605mm
J1(第1軸) ±170(°*4)
J2(第2軸) ±120°
J3(第3軸) +151°, −120° +155°, −125°
動作角度
J4(第4軸) ±270°
J5(第5軸) ±120(°*5)
J6(第6軸) ±360°
最大可搬質量 4kg
J1 425deg/sec
J2 340deg/sec 283.33deg/sec
J3 385.72deg/sec 309.35deg/sec
速度
J4 425deg/sec
J5 327.01deg/sec
J6 680deg/sec
標準サイクルタイム(*1) 0.35sec
位置繰返し精度(ツール取付面中心()*2) ±0.02mm
最大許容慣性モーメント J4,J5 0.2kg㎡
(イナーシャ) J6 0.05kg㎡
J4,J5 6.66Nm
最大許容モーメント
J6 3.13Nm
信号線・エア配管電磁弁 信号線 10芯(近接センサ等の信号線()*6,7)
(オプション) エア配管電磁弁(*3) 5系統(φ4×4, φ4×1) 電磁弁(2ポジション、ダブルソレノイド)×2
17芯(カメラ等の電源線)(*7)
通信ケーブルフランジ仕様-A(オプション)
LAN×1(1000BASE-T) (*8)
常用圧力 0.20~0.39MPa
エア源
許容最大圧力 0.49MPa
空気伝播騒音(A加重等価持続音圧レベル) 65dB以下
耐悪環境タイプ: IP67(*9() オプション)
保護等級 防塵防滴タイプ : 手首 IP65 / 本体 IP54(オプション)
クリーンタイプ : ISO クラス3 / 5(オプション)
質量 約27kg 約28kg
*1: 負荷1kg時、ロボットで高さ25mmまで物を持ち上げ、300mm離れた2点間を往復させるのに必要な時間です。 *2: 位置繰返し精度は周囲温度一定時の精度です。
*3: φ4×4のみ内蔵電磁弁にて制御可能です。 *4: 壁掛け設置時は動作角度に制限があります。詳細は別途お問合せください。
*5: 通信ケーブルフランジ仕様-A 選択時 J5の動作角度は +120°, −110°になります。 *6: 通信ケーブルフランジ仕様-A と同時選択時、本線(近接センサ等の信号線)は4芯になります。
*7: 許容電流の制限があります。 *8: コネクタパネルと接続するLANケーブルは20m以下になります。
12 *9: ロボット内部にエア圧をかけて保護等級IP67を保持します。エアパージユニットをご使用ください。また、水中では動作させないでください。
25 mm
■ 外形寸法および動作範囲 単位:mm
5
VS-050 VS-060 6軸
605.2 605.2 垂
70[75(]105) 300 直
505.2 505.2 164.5 多関
7[0 75(]105) 255 605.2 605.270[75(]105) 300 節
505.2 119.5 505.2 164.5 ロ
7[0 75(]105) 255 P点 ボP点 1
119.5 25° ッ° 1
0° 151 2 0
° ト0° P点 9 .2
12P点 2 12 30090° . R5
° 51°
5
R25120 J5 0° J3
° 4
20 11 J3
° A 9
.2 300
.2 5)0
A J5 90° 3
軸
R25
5 120 R
A J5°
J3 (R 水
1 )20 J5 0° J3
° 1 5 平
A ° 2 12 10 20 12
0 20 R3
0
1 ° ° °( 多12 関0 ° 1 0) 0° 12° 120 20 (R25° 1
2 J2 0° R270.5 節J2 ロ
36.1 15(1R25
0)
1 R1
40.9
R J2 R ° J2
R270.5 ボ
24 R255.2R255.2 .9 0.2
ッ
R136.1
4 151 R140R ° .2 R300.2
R30 ト
5
R25
24 25
551.2° 4 °
R
0 R300.21 12 R300.2
151°
A A
20° 15
5°A A 組
A 1 A 155°A A 込125° 型
P点の動作範囲 125° ロボ
P点の動作範囲 J1=±170° ット
P点の動作範囲 J1=±J2J317
=0±120°
J2=±12=0+
°155°,-125°
P点の動作範囲 J3=+J415=
°
5±°2J5=+1,-1
7
22
0
05
°
J4=±270° °,
°-120°
J5=+J612=0±°3,-16200°°
J6=±360°
工
P点の動作範囲 170° 程P点の動作範囲 間
P点の動作範囲 170°
P点の動作範囲 搬送
ロ
170°
ボ
170° 195195 195 ッケーブルスペース J6 195J6 J4 ケーブルスペース J4 ケーブルスペース ト
±360°J6±270°J4 ±J3660°±J2470° P点 ケーブルスペース±360°±270° P点P点 ±360°±270° P点
J6 J4 J4 J1J6 J1 J6 J4J4 J1J6 J1 人
.1)
協
6 .1)3 6 働
(R1 R13 1( 7107°0° ロボ
ッ
ト
17107°0°
コ
ン
ト
ロ
ー
ラ
■ ツール取付面詳細 ■ ツール取付詳細面 ■ ベース取付寸法〈上面〉
標準フランジ仕様(矢視A) 通信フランジケーブル仕様-A(矢視A)
4xM5 深 7
Ø40h (P4.Cx.MD 53 1深.5 7
135
Ø 8 )深 0 49±0.05 1354 4xØ10穴 0h 5* -8 0. (P.C.D 31.5) 4
ロ
深
0
0 39 4xM5 深 6 49±xR0 (for 4Mx8Ø 取10付穴用 )5* -0.03 4xM(P.5C .深D 361.5) 54
.05
9 xR (for M8 取付用)
ボ
5 ッ(P.C.D 31.5) ト
機
7+0
.021 能
Ø20H
0
+0.02
1 紹
7 0 +0.012 深 5 0.021+
Ø20H深 5 Ø5H7 0 7 0 80 A-A 介
5 Ø5H7 +0.012 深 5 20
H
Ø .021 2xØ6H7+0.012深 0 +07 0 Ø5H7+0.012 深 5
0
3 0 80 A-A2深0HØ (基準穴) +0.012*標準タイプ以外はこの外径をハンドツール Ø5H7+0.012 3 0 深 5
2xØ6H7 0
などの固定・位置決めに使用できません。 深 (基準穴)*標準タイプ以外はこの外径をハンドツール
などの固定・位置決めに使用できません。
ソ
フ
[ ]内はクリーンタイプ(ISO クラス3 / 5) ( () )内は通信ケーブルフランジ仕様-A ト
ウ
ェ
ア
■ 型式の見方 ・周
辺
機
V S - A V 6 - - N N - N N N 器
ロボット名: 設置方向: 軸数: 適合規格: フランジ: 表面処理:
VS: 垂直多関節ロボット A: 全方向 V6: 6軸 N: 標準仕様 N: 標準フランジ仕様 N: 標準カラーリング( ※2) サ
アーム全長: 耐環境: U: UL仕様 A : 通信ケーブル A : 塗装レス( ※3) ポフランジ仕様-A( ※1)
050 A3: 505mm NN : 標準タイプ W7: 耐悪環境タイプ(IP67) ート
060 A3: 605mm W4: 防塵防滴タイプ(手首: IP65, 本体: IP54) コネクタパネル: 信号線・エア配管電磁弁:
C3: クリーンタイプ(ISO クラス3) N: コネクタパネル背面仕様 A : 電磁弁 (2ポジション、ダブルソレノイド)×2
C5: クリーンタイプ(ISO クラス5) A : コネクタパネル底面仕様 N: 信号線・エア配管電磁弁レス仕様
※1: 標準タイプ時選択可能 ※2: 標準タイプ選択時 ※3: 耐悪環境タイプ(IP67)選択時(標準カラーリングは特別仕様(オプション)となります。) 詳細については、別途お問合せください。
本ページに記載されているデータは標準タイプになります。その他のバリエーションについては、当社ホームページをご参照ください。
13
95 87.9
590545 87.9
5045 120
1 °20°
(R5
( 0R 55 .0 25 ).2)
35.235.2 181.1581.5
345 345
595 595 10 10
95
550
9
04
5
455
12 87.95°12 1287.95° 0° 120°
( (RR 60
(R1
(
4 5R.0 261 )040.9
5.
.9)
2)
) 155° 155°
144±0.05
144±0.05
135
160 107.7 181.5
135
107.7 183160 1
4.55
650 10
345
650 10
-
°
155
°
155
.2)
05 .2)
(R6 60
5
(R
.2)
50
5)
(0R5
.2
(R5
垂直多関節ロボット 対応ロボットコントローラ
VSシリーズ RC8A ▶P.48 RC8 ▶P.50
VS-068 / 087
クラストップレベルの高速性能を誇り、生産性の
大幅アップを実現します。スリムなアームで可動
範囲が広く様々なレイアウトに対応できます。
最大リーチ 710 ・ 905mm
最大可搬質量 7kg
標準サイクルタイム 0.31・ 0.34秒
位置繰返し精度 ±0.02 ・ 0.03mm
300 mm
標準サイクルタイム
ロボットで高さ25mmまで物を持ち
上げ、300mm離れた2点間を往復
させるのに必要な時間です
VS-087
■ 仕様
項 目 仕 様
ロボット名 VS-068 VS-087
軸数 6
位置検出方式 アブソリュートエンコーダ
駆動モータ/ブレーキ 全軸ACサーボモータ / 全軸ブレーキ付
アーム全長(第1アーム+第2アーム) 680(340+340)mm 875(445+430)mm
最大動作領域(P点) 710mm 905mm
J1(第1軸) ±170(°*4)
J2(第2軸) +135°, −100°
J3(第3軸) +153°, −120° +153°, −136°
動作角度
J4(第4軸) ±270°
J5(第5軸) ±120°
J6(第6軸) ±360°
最大可搬質量 7kg
J1 356.25deg/sec 285deg/sec
J2 303deg/sec 252.5deg/sec
J3 378.75deg/sec 303deg/sec
速度
J4 475deg/sec 378.75deg/sec
J5 475deg/sec 378.75deg/sec
J6 760deg/sec 606deg/sec
標準サイクルタイム(*1) 0.31sec 0.34sec
位置繰返し精度(ツール取付面中心()*2) ±0.02mm ±0.03mm
最大許容慣性モーメント J4,J5 0.45kg㎡
(イナーシャ) J6 0.1kg㎡
J4,J5 16.2Nm
最大許容モーメント
J6 6.86Nm
信号線 10芯(近接センサ等の信号線()*5,6)
信号線・エア配管電磁弁 7系統(φ4×6, φ6×1)[電磁弁は1~3の選択式]
(オプション) エア配管電磁弁(*3) 1.電磁弁(2ポジション、ダブルソレノイド)×32.電磁弁(3ポジション、エキゾーストセンター)×3
3.電磁弁(3ポジション、クローズドセンター)×3
17芯(カメラ等の電源線)(*6)
通信ケーブルフランジ仕様-A(オプション)
LAN×1(1000BASE-T) (*7)
常用圧力 0.20~0.39MPa
エア源
許容最大圧力 0.49MPa
空気伝播騒音(A加重等価持続音圧レベル) 65dB以下
耐悪環境タイプ: IP67(*8() オプション)
保護等級 防塵防滴タイプ : 手首 IP65 / 本体 IP54(オプション)
クリーンタイプ : ISO クラス3 / 5(オプション)
質量 約49kg 約51kg
*1: 負荷1kg時、ロボットで高さ25mmまで物を持ち上げ、300mm離れた2点間を往復させるのに必要な時間です。 *2: 位置繰返し精度は周囲温度一定時の精度です。
*3: φ4×6のみ内蔵電磁弁にて制御可能です。 *4: 壁掛け設置時は動作角度に制限があります。詳細は別途お問合せください。
*5: 通信ケーブルフランジ仕様-A と同時選択時、本線(近接センサ等の信号線)は4芯になります。 *6: 許容電流の制限があります。
*7: コネクタパネルと接続するLANケーブルは20m以下になります。
*8: ロボット内部にエア圧をかけて保護等級IP67を保持します。エアパージユニットをご使用ください。また、水中では動作させないでください。
14
25 mm
■ 外形寸法および動作範囲 単位:mm
5
VS-068 VS-087 6軸
875.5 875.5 875.5 875.5 垂
680.6 680.6680.6 680.6 80[85] (115) 4830[085] (115) 430 直
80[85] (115) 34080[85] (115) 340 287 287 多
197 197 関
節
ロ
P点 P点 .6 .6
120̊ 12340̊
0 0
34 P点 0˚ P点 0˚
ボ
R R 12 12 ット
A A J3 J3J5 J5 J5
J3 J5 J3
120 120 ( 12 12 4˚
35̊
˚ 5̊ 0 0 R334
8
34 7
0˚ (R8 0˚
R6 1 R6 R1 R
5. 75. 軸
80.6 8
5) 50. )6 水
J2 153̊ J2 153̊
5̊ 5̊
13 3 平
R178.3 R178.3
R224.5 R22
1
R32 R
4
32 J2
.5 15J32˚ 153˚ 多
2.8 2.8 関
0̊ 0̊ R445 R445R30 R
12 12 9.
3
3 09.3 節
R R ロ
P点の動作範囲 P点の動作範囲 4136̊ 3
4
53̊ A A
0
53̊ A A .
3
5 136̊ 0.5 ボ
1 1 ッA A A A ト
153
˚
153
˚
30 30 30 30
P点の動作範囲 P点の動作範囲 組
込
型
ロ
ボ
ッ
ト
P点の動作範囲 P点の動作範囲 170˚ 170˚
70° 70°
P点の動作範囲 P点の動作範囲 1 1
P点 P点
P点 P点 195 195 195 195
ケーブルスペース ケーブルスペース 工
J6 J4 J6 J4 J4 J4 ケーブルスペース ケーブルスペース 程
±360°±270° ±360°±270° J6 J6±360°±270° ±360°±270° 間
J6 JJ61 J1 J6 J6J1 J1 搬
J4 J4 J4 J4 送
6 6 R25 R. . 2
ロ
10 10 5.
5 .5 4 5
7 7 R90 R90
5 .5 4.5 ボ
R R ッ
ト
170 1° 70° J1=±170° J1=±170°
J2=+135°,-100° J2=+135°,-100° 170° 170° J1=±170° J1=±170°J3=+153°,-120° J3=+153°,-120° J2=+135°,-100° J2=+135°,-100°
J4=±270° J4=±270°
J5=±120° J5=±120° J3=+153°,-136° J3=+153°,-136°
J6=±360° J6=±360° J4=±270° J4=±270° 人
J5=±120° J5=±120° 協
J6=±360° J6=±360° 働
ロ
ボ
ッ
ト
■ ツール取付面詳細標準フランジ仕様(矢視A) ■ ベース取付寸法コネクタパネル背面仕様〈上面〉
Ø4
深 0
Ø4
h5 8深
0
0 h8 0 160 160-0.0539 * -0.039 * 4×M54 深× M6 5 深 6 66±0.0656±0.054 4
(P.C.D (3P1.C.5.D) 31.5) × × 4×Ø124穴×Ø12穴R2 R0 20 (for M1(f0o取r M付1用0)取付用) コ
ン
ト
+0.02
1 0.021+
Ø20H
7 0
Ø20H
7 0 ロ
Ø5H7+Ø0.051H2 深7+ 50.012深 5 深 5 0 0 深 5
ー
ラ
*標準タ*イ標プ準以タ外イはプこ以の外外は径こをのハ外ン径ドをツハーンルドツール 2×Ø6H2×7
+Ø0.061H2 7 +0.01200 1000 0
などの固な定ど・の位固置定決・め位に置使決用めでにき使ま用せでんき。ません。 (基準穴()基準穴) A-A A-A
■ ツール取付詳細面通信フランジケーブル仕様-A(矢視A) ■ ベース取付寸法コネクタパネル底面仕様〈上面〉
4×M54 深× M7 5 深 7 ロ160 160 ボ
(P.C.D (3P1.C.5.D) 31.5) 66±0.0656±0.05 ッ
4× 4× 4×Ø124穴×Ø12穴 トR20 R20 (for M1(f0o取r M付1用0)取付用) 機能
紹
介
0.02
1
0.02
1
0H7
+ 0
0H7
+ 0 Ø Ø
Ø2 Ø2 100 100 ( 1 ( 1
深 3 深 3 Ø5H7
+Ø0.0510 H2 深7+ 005.012 深 5 2×Ø6H2×7+Ø0.061H2 7+0.012 コ
8
ネ 5 コ
8
ネ 50 0
(基準穴()基準穴) A-A A-A クタ クス タペ スー ペー ソス フ) ス) ト
ウ
[ ]内はクリーンタイプ(ISO クラス3 / 5) ( () )内は通信ケーブルフランジ仕様-A ェア
■ 型式の見方 ・周
辺
機
V S - A V 6 - - N N - N N N 器
ロボット名: 設置方向: 軸数: 適合規格: フランジ: 表面処理:
VS: 垂直多関節ロボット A: 全方向 V6: 6軸 N: 標準仕様 N: 標準フランジ仕様 N: 標準カラーリング( ※2) サ
アーム全長: 耐環境: U: UL仕様 A : 通信ケーブル A : 塗装レス( ※3) ポフランジ仕様-A( ※1)信号線・エア配管電磁弁:
068 A4: 680mm NN : 標準タイプ W7: 耐悪環境タイプ(IP67) ー
087 A4: 875mm W4: 防塵防滴タイプ(手首: IP65, 本体: IP54) コネクタパネル: B : 電磁弁 (2ポジション、ダブルソレノイド)×3 ト
C3: クリーンタイプ(ISO クラス3) N: コネクタパネル背面仕様 C : 電磁弁 (3ポジション、エキゾーストセンター)×3
C5: クリーンタイプ(ISO クラス5) A : コネクタパネル底面仕様 D: 電磁弁 (3ポジション、クローズドセンター)×3N: 信号線・エア配管電磁弁レス仕様
※1: 標準タイプ時選択可能 ※2: 標準タイプ選択時 ※3: 耐悪環境タイプ(IP67)選択時(標準カラーリングは特別仕様(オプション)となります。) 詳細については、別途お問合せください。
本ページに記載されているデータは標準タイプになります。その他のバリエーションについては、当社ホームページをご参照ください。
15
100
55 45 102
120̊
R340.6
153
100 ˚
55 45 102
120̊
R340.6
153˚
186 197.5
395
735 20
186 197.5
395
735 20
100
55 45 102
184±0.05 R 1184±0.05 4 33 60 ˚.5
184±0.05 184±0.05
1
100 53˚
55 45 102
R 14 33 6 R0 ˚ 4. 35 0.5
160 160 1350.1 53200 200 ˚
160 160
200 200 R430.5
197.5
350.1 395
840 20
215
ケーブルスペース
215
ケーブルスペース
197.5
395
840 20
-
˚
136
00˚1
136
˚
100
˚
R340
.6
8.3
120̊
0
10
0̊ R2
R340
.6
8.3
120̊ 00̊ R2
0
1
垂直多関節ロボット 対応ロボットコントローラ
VSシリーズ RC8A ▶P.48 RC8 ▶P.50
VS-6556 / 6577
コンパクトかつスリムなボディの中に、ハイスピ
ード・ハイパワーを備えています。また、さまざま
な環境に対応可能なバリエーションを取り揃え
ています。
最大リーチ 653 ・ 854mm量
最大可搬質量 7kg
標準サイクルタイム 0.49 ・ 0.59秒
位置繰返し精度 ±0.02 ・ 0.03mm
300 mm
標準サイクルタイム
ロボットで高さ25mmまで物を持ち
上げ、300mm離れた2点間を往復
させるのに必要な時間です VS-6556-B
■ 仕様
項 目 仕 様
ロボット名 VS-6556 VS-6577
軸数 6
位置検出方式 アブソリュートエンコーダ
駆動モータ/ブレーキ 全軸ACサーボモータ / J2~J4 ブレーキ付(ブレーキ増設タイプ: J2~J6 ブレーキ付)
アーム全長(第1アーム+第2アーム) 565(270+295)mm 770(365+405)mm
J1(旋回) 75mm
アームオフセット
J3(前腕) 90mm
最大動作領域(P点) 653mm 854mm
J1(第1軸) ±170°
J2(第2軸) +135°, −100°
J3(第3軸) +166°, −119° +169°, −119°
動作角度
J4(第4軸) ±190°
J5(第5軸) ±120°
J6(第6軸) ±360°
最大可搬質量 7kg(手首下向き±45°以内()*4)
J1 262.5deg/sec 175deg/sec
J2 240deg/sec 200deg/sec
J3 300deg/sec 200deg/sec
速度
J4 300deg/sec
J5 300deg/sec
J6 480deg/sec
標準サイクルタイム(*1) 0.49sec 0.59sec
位置繰返し精度(ツール取付面中心()*1()*2) ±0.02mm ±0.03mm
最大許容慣性モーメント J4,J5 0.413kg㎡
(イナーシャ) J6 0.063kg㎡
ユーザ用エア配管(*3) 7系統(φ4×6, φ6×1)電磁弁(2ポジション、ダブルソレノイド)×3
ユーザ用信号線 10芯(近接センサ等の信号線)
常用圧力 0.10~0.39MPa
エア源
許容最大圧力 0.49MPa
空気伝播騒音(A加重等価持続音圧レベル) 80dB以下
保護等級 防塵防滴タイプ : 手首 IP65 / 本体 IP54(オプション)クリーンタイプ: クラス10 / 100(オプション)
質量 約35kg 約36kg
* 1: 負荷1kg時、ロボットで高さ25mmまで物を持ち上げ、300mm離れた2点間を往復させるのに必要な時間です。
*2: 位置繰返し精度は周囲温度一定時の精度です。 *3: φ4×6のみ内蔵電磁弁にて制御可能です。 *4: 手首下向き±45度を超える場合は最大可搬質量6kgです。
16
25 mm
■ 外形寸法および動作範囲 単位:mm
5
VS-6556-B VS-6577-B 6軸
779.88 779.88 垂
485 直
578.42 575.68 80 405 多
375 115 218 関
80 295 節
108 P点 ロ
20° ボ
P点 _ 1 ッ
20º
ト
_ 1 A J5 1
+ 20
A ° + J3J5 4_ 軸
+ 120º + J3_ 水
R5 平78. 19.74
3.35
42 R2 R R
32 多
779.88 関節
J2 J2 ロ
R158.79 + _ R166.34 +
_ ボ
ッ
209º
ト
09°2
76° 組
79 込° 型
75 ロ
P点の動作範囲 ボ
ッ
ト
75
P点の動作範囲
P点の動作範囲
工
170° 程間
P点の動作範囲 170º 搬送
ロ
ボ
190 ッ187.7 ト
P点 P点
J6 J4 J6 J4
+ + + + J1 - 人
_ _ + 協
±360º ±190º - -±360°±190° 働ロ
2
3.4 .88
) 8 ボ
5 4 .86 ッR R85 5
4
( R
8 ト
170º
170°
コ
ン
ト
ロ
ー
ラ
■ ツール取付面詳細(矢視A) ■ ベース取付寸法〈上面〉 ロ
200 ボ
2- Ø6H7+0.012 ッ 0 160 4-Ø12穴 ト
Ø40 4-M5 深 8 (基準穴) 66 ± 0.05h (M10取付用)
機
8
- 00
(P.C.D 31.5) R20 能
.039 紹
介
Ø5 H7+ 0 . 0 12 0 深 7
6
.021 深 ソ
7+
0
H
0 フ
20 トØ ウ
ェ
ア
■ 型式の見方 ・周
辺
機
器
V S - 6 5 -
サ
ロボット名: 軸数: 標準可搬質量: アーム全長: バリエーション: ポー
VS: 小型垂直多関節ロボット 6: 6軸 5: 6kg 56: 565mm 無: 標準タイプ B: ブレーキ付 ト
※最大可搬質量は7kg 77: 770mm W: 防塵防滴タイプ(手首: IP65, 本体: IP54) BW: ブレーキ付・防塵防滴タイプ
P: クリーンタイプ(クラス 10 / 100) BP: ブレーキ付・クリーンタイプ
本ページに記載されているデータは標準タイプになります。その他のバリエーションについては、当社ホームページをご参照ください。
17
57 65
51 59 105
Ø65
135º
164.34 73.46
203
390.95
335 270 90
57 65 105
51 59 Ø65
184 ± 0.05
135°
160
200
143.26 203
337.97 335 365 90
-
.884
R41
0°
10
.34
R24
1
8
R414.8
1A 1B
2A 2B
C N 2 1
3A 3B A I R 2
.42
R3
08
00
º
1
9
R308.42
.7
233 1.3
4)
R 24
(R
垂直多関節ロボット 対応ロボットコントローラ
VMシリーズ RC8A ▶P.48 RC8 ▶P.50
VM-6083 / 60B1
デンソーロボット全垂直多関節ロボットの
中で最も長いアームリーチ、大きな可搬質
量となります。
最大リーチ 1,021・ 1,298mm
最大可搬質量 13kg*4
標準サイクルタイム 0.89 ・ 0.95秒
位置繰返し精度 ±0.05 ・ 0.07mm
300 mm
標準サイクルタイム
ロボットで高さ25mmまで物を持ち
上げ、300mm離れた2点間を往復
させるのに必要な時間です
VM-60B1
■ 仕様
項 目 仕 様
ロボット名 VM-6083 VM-60B1
軸数 6
位置検出方式 アブソリュートエンコーダ
駆動モータ/ブレーキ 全軸ACサーボモータ / J2~J6 ブレーキ付
アーム全長(第1アーム+第2アーム) 830(385+445)mm 1,110(520+590)mm
J1(旋回) 180mm
アームオフセット
J3(前腕) 100mm
最大動作領域(P点) 1,021mm 1,298mm
J1(第1軸) ±170°
J2(第2軸) +135°, −90°
J3(第3軸) +165°, −80° +168°, −80°
動作角度
J4(第4軸) ±185°
J5(第5軸) ±120°
J6(第6軸) ±360°
最大可搬質量 13kg(*4)
J1 180deg/sec 150deg/sec
J2 150deg/sec 112.5deg/sec
J3 200deg/sec 150deg/sec
速度
J4 262.5deg/sec
J5 262.5deg/sec
J6 420deg/sec
標準サイクルタイム(*1) 0.89sec 0.95sec
位置繰返し精度(ツール取付面中心()*2) ±0.05mm ±0.07mm
最大許容慣性モーメント J4,J5 0.36kg㎡
(イナーシャ) J6 0.064kg㎡
ユーザ用エア配管(*3) 7系統(φ4×6, φ6×1) 電磁弁(2ポジション、ダブルソレノイド)×3
ユーザ用信号線 10芯(近接センサ等の信号線)
常用圧力 0.10~0.39MPa
エア源
許容最大圧力 0.49MPa
空気伝播騒音(A加重等価持続音圧レベル) 80dB以下
保護等級 防塵防滴タイプ : 手首 IP65 / 本体 IP54(オプション)クリーンタイプ : クラス100
質量 約82kg
* 1: 負荷5kg時、ロボットで高さ25mmまで物を持ち上げ、300mm離れた2点間を往復させるのに必要な時間です。
*2: 位置繰返し精度は周囲温度一定時の精度です。 *3: φ4×6のみ内蔵電磁弁にて制御可能です。
*4 : 11kgを超える場合は手首下向き ±10°制限となります。
18
25 mm