




「ちょうどいい」セーフティコントローラ FS1B形。
・厳選された 24種類の安全制御ロジック から選ぶだけ。難しいプログラミンは不要。
・安全制御ロジック自体が認証されているので、認証取得の手間がなく、安心して使える。
関連メディア
このカタログについて
| ドキュメント名 | 【安全制御を手頃に】セーフティコントローラ FS1B形 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 4.7Mb |
| 登録カテゴリ | |
| 取り扱い企業 | IDEC株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
セーフティコントローラ
FS1B形
プログラムレスで安全制御
認証済みの制御ロジックで機械認証を円滑に
Page2
プログラム不要のセーフティコントローラ
24 の安全制御ロジックを標準搭載
簡単設定 多彩な制御
■ 国際安全規格認証済み ■ 部分停止制御
安全制御ロジックを内蔵
■ モード切替が必要な制御
■ ソフトウェア不要
■ スイッチやセンサの混載制御
■ ユニバーサル入力(*1)
■
■ ディップスイッチによる設定 OR制御
■ スタンドアローン ■ 両手操作制御ロジック内蔵
*1)入力機器の設定機能
活用シーン
半導体製造装置 樹脂成型機 ロボット生産設備
金属加工機械 食品加工機械
2
Page3
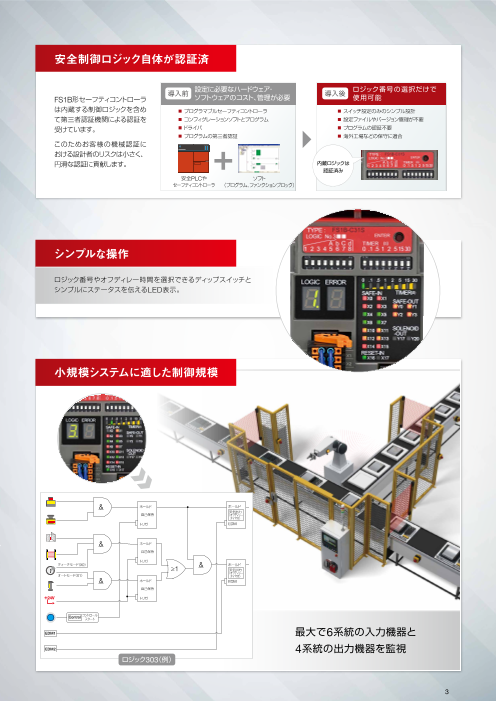
安全制御ロジック自体が認証済
導入前 設定に必要なハードウェア・ 導入後 ロジック番号の選択だけで
FS1B形セーフティコントローラ ソフトウェアのコスト、管理が必要 使用可能
は内蔵する制御ロジックを含め ■ プログラマブルセーフティコントローラ ■ スイッチ設定のみのシンプル設計
て第三者認証機関による認証を ■ コンフィグレーションソフトとプログラム ■ 設定ファイルやバージョン管理が不要
受けています。 ■ ドライバ ■ プログラムの認証不要
■ プログラムの第三者認証 ■ 海外工場などの保守に適合
このためお客様の機械認証に
おける設計者のリスクは小さく、
円滑な認証に貢献します。 + 内蔵ロジックは
認証済み
安全PLCや ソフト
セーフティコントローラ (プログラム、ファンクションブロック)
シンプルな操作
ロジック番号やオフディレー時間を選択できるディップスイッチと
シンプルにステータスを伝えるLED表示。
ロボット生産設備 小規模システムに適した制御規模
安全出力2
& Y2
ホールド ホールド
安全出力 Y3
自己保持 (オフディレー
タイマ付)
トリガ EDM
& ホールド
自己保持
安全出力1
トリガ
ティーチモード(X0) ホールド
≥1 & Y0
安全出力 Y1
(オフディレー
オートモード(X1) タイマ付)
& ホールド EDM
自己保持
トリガ
Control コントロールスタート
EDM1 最大で6系統の入力機器と
EDM2 4系統の出力機器を監視
ロジック303(例)
3
Page4
ユニバーサル入力機能
FS1B形は、接点やOSSD(トランジスタ信号)など、さまざまな安全入力を監視するために入力ファンクションを
変更することができます。FS1B形はこのような設定もソフトウェアは不要です。
各制御ロジックの安全入力部には 初期設定(例) コンフィグレーションでの選択肢(例)
標準的なアプリケーションを意図 二重化直接
開路入力 二重化安全入力Ⅱ 二重化
した安全入力機器が初期設定され NO/NC入力
ていますが、各々他のタイプの安全 同期監視あり 0.5s
入力機器へ変更が可能です。 二重化連動
入力 二重化安全入力Ⅱ 二重化
NO/NC入力
同期監視無し
二重化安全入力Ⅱ 二重化連動 二重化
入力 NO/NC入力
同期監視無し
二重化
NO/NC入力 二重化連動
入力 二重化安全入力Ⅱ
同期監視あり 0.5s
(*1)
監視したい入力機器を接続した状態で *1) スイッチ(接点)が接続されると赤、
エンタボタンを長押しすると センサなど(OSSD)が接続されると緑、
非接触安全スイッチなど(1NO+1NC)が接続されると橙でコンフィグレーションが完了します。
表示されます。
設定をロック
防護カバーを同梱のマーキングタイにて封じることにより、
不用意にディップスイッチを動かしたり、設定が変更されることを防止します。
トータルソリューション IDECでは、FS1B形セーフティコントローラへ接続可能な
様々な安全機器や表示装置を含めたトータル提案が可能です。
両手操作スイッチ 安全リレーモジュール セーフティリレーバリア 非常停止用 安全スイッチ ソレノイド付安全スイッチ パイロットライト
HR5S形、HR6S形 EB3N形 押ボタンスイッチ HS6B形、HS5D形 (スプリングロックタイプ) (ミューティング用)
XA1E形、XW1E形、 HS1T形、HS6E形、 HW1P-5Q4形
XN1E形、HA1B形、 HS5L形、HS1L形
HW1B形、HW1E形
セーフティコントローラ
FS1B形 積層表示灯
強制ガイド式リレー センサ LD6A形
RF1V形、RF2形 非接触安全スイッチ (ミューティング用)
HS3A形 イネーブル/ レーザスキャナ (PNPタイプ)
グリップスイッチ セーフティライトカーテン (PNPタイプ) SA2E形
HE2B形、HE3B形、 (PNPタイプ) SE2L形
HE5B形、HE6B形、
HE1G-L形、HE2G形
4
Page5
ロジックシミュレータ
内蔵される24種類の安全制御ロジックから、お客様の条件に合うロジックを選択し、
ロジックの挙動をシミュレーションすることが可能です。
1. IDEC Web内 FS1B形トップ画面 2. ロジック検索条件 3. ロジック選択
24種類のロジックから シ ミュレーションしたい
ご希望のロジックを検索 ロジックを選択します。
するための条件です。 (複数選択も可能)
4. 入力機器・入力状態の選択
ク リックで入力を有効/無効に
できます。
接続する入力機器をリストから
選択できます。
任意の装置名を入力できます。
(レポート用)
入力機器と連動して入力ファン
クションが自動表示されます。
オフディレー制御を確認するため ロ ジック途中の状態は「H(High)」で確認でき、
に0、1、2、5秒の設定が可能です。 OSSDが出力されると歯車が回ります。
5. 制御ロジックの配線例を表示
シ ミュレーションしたロジックについてお客様が設定した入力機器の配線例を
表示させることができます。( 選択した入力機器の配線が表示)
認証機関へのレポートや社内管理用にご活用いただけます。
5
Page6
内蔵ロジック( 24種類)
FS1B-C31S 内蔵ロジック
ロジック ミューティング セレクト
ロジック モード 安全出力
No. 入力 入力 Y0 Y1 Y2 Y3
二重化安全出力
301 AND回路 二重化安全出力
(オフディレータイマ付)
二重化安全出力
31A OR回路を含む回路 二重化安全出力
(オフディレータイマ付)
二重化安全出力
31b OR回路を含む回路 二重化安全出力
(オフディレータイマ付)
ミューティング機能を 二重化安全出力
31C 〇 二重化安全出力
含む回路 (オフディレータイマ付)
安全出力
31d モード切替機能を含む回路 〇 安全出力 安全出力 安全出力
(オフディレータイマ付)
二重化安全出力 二重化安全出力
302 部分停止回路
(オフディレータイマ付) (オフディレータイマ付)
ミューティング機能、
32A 〇 二重化安全出力 二重化安全出力
両手操作入力を含む回路
OR回路、 二重化安全出力
32b 二重化安全出力
XOR回路を含む回路 (オフディレータイマ付)
OR回路、 二重化安全出力
32C 二重化安全出力
XOR回路を含む回路 (オフディレータイマ付)
モード切替機能を含む 安全出力
32d 〇 安全出力 安全出力 安全出力
部分停止回路 (オフディレータイマ付)
二重化安全出力 二重化安全出力
303 モード切替機能を含む回路 〇
(オフディレータイマ付) (オフディレータイマ付)
二重化安全出力
33A モード切替機能を含む回路 〇 二重化安全出力
(オフディレータイマ付)
モード切替機能、 二重化安全出力
33b 〇 二重化安全出力
OR回路を含む回路 (オフディレータイマ付)
モード切替機能を含む 安全出力
33C 〇 安全出力 安全出力 安全出力
部分停止回路 (オフディレータイマ付)
2つのモード切替機能を含む 二重化安全出力
33d 〇 二重化安全出力
回路 (オフディレータイマ付)
モード切替機能を含む 安全出力
304 〇 安全出力 安全出力 安全出力
部分停止回路 (オフディレータイマ付)
ミューティング機能を 安全出力 全出力
〇 安全出力 安
34A 安全出力
含む部分停止回路 (オフディレータイマ付) (オフディレータイマ付)
ミューティング機能を 安全出力 力
34b 〇 安全出力 安全出
安全出力
含む部分停止回路 (オフディレータイマ付) (オフディレータイマ付)
モード切替機能、 安全出力
34C 〇 安全出力 安全出力 安全出力
OR回路を含む部分停止回路 (オフディレータイマ付)
OR回路を含む 安全出力 安全出力
34d 安全出力 安全出力
部分停止回路 (オフディレータイマ付) (オフディレータイマ付)
安全出力
305 部分停止回路 安全出力 安全出力 安全出力
(オフディレータイマ付)
安全出力
306 部分停止回路 安全出力 安全出力 安全出力
(オフディレータイマ付)
安全出力
部分停止回路 安全出力 安全出力
307 安全出力
(オフディレータイマ付) (オフディレータイマ付)
モード切替機能を含む 安全出力 全出力
308 〇 安全出力 安
安全出力
部分停止回路 (オフディレータイマ付) (オフディレータイマ付)
6
Page7
内蔵ロジック
ロジック301
非常停止機器や開口部が複数あり、全ての安全条件が揃った場合にだけ機械の起動を許可
するシンプルな制御ロジックです。接点やOSSDなど異なる入力を1台のコントローラに
入力でき、モニタも可能です。自動リセットと手動リセットのいずれかを選択できます。
ロジック回路 安全システムの構成例
安全入力 6 安全入力 5
安全入力1 二重化連動
T0-X0, 入力
T1-X1
安全入力 4
安全入力2
T2-X2, 二重化連動
入力
T3-X3
安全入力3 安全出力 1/2
T4-X4, 二重化連動
T5-X5 入力
安全出力1
安全入力4
T6-X6, 二重化連動 & Y0
ホールド ホールド
T7-X7 入力 Y1
自己保持 安全出力
安全入力5
T10-X10, 二重化直接 トリガ EDM
T11-X11 開路入力
安全入力6 安全出力2
T12-X12, 二重化直接
開路入力 Y2
T13-X13 ホールド
安全出力 Y3
(オフディレー 安全入力 2
リセット入力1
X16 モニタ入力 タイマ付)
リセット EDM
OR セレクタ
リセット入力2
X17 Control コントロールモニタ入力 スタート
外部デバイス
モニタ1 外部デバイス
EDM
T14-X14 モニタ入力
外部デバイス
モニタ2 EDM 外部デバイス
T15-X15 モニタ入力
ロジック31A
ロ ボットと人間が作業場所を共用する場合のロジックです。同時に両者が作業台に共存する
場合にはロボットを停止します。作業台は2か所まで監視できます。自動リセットと手動リセット
のいずれかを選択できます。
ロジック回路 安全システムの構成例
安全入力 6
安全入力1 二重化直接
T0-X0, 安全入力 3
開路入力
T1-X1 ≥1
安全入力2
T2-X2, 二重化連動
入力
T3-X3 安全出力1
安全入力3 Y0
T4-X4, 二重化直接 & ホールド ホールド
T5-X5 開路入力 Y1
≥1
安全入力4 {エリア B 作業台
自己保持 安全出力
T6-X6, 二重化連動 トリガ EDM 安全入力 4
T7-X7 入力
安全入力5
T10-X10, 二重化直接
T11-X11 開路入力 安全出力2
Y2 安全出力 1/2
ホールド
安全入力6
T12-X12, 二重化直接 安全出力 Y3
開路入力 (オフディレー
T13-X13 タイマ付)
EDM
リセット入力1
X16 モニタ入力
リセット
OR セレクタ
リセット入力2 モニタ入力 安全入力 2
X17 Control コントロールスタート
外部デバイス
モニタ1
T14-X14 {エリア A
EDM 外部デバイス 作業台
モニタ入力
外部デバイス
モニタ2 EDM 外部デバイス
T15-X15 モニタ入力
安全入力 1 安全入力 5
7
安全入力 1
安全入力 3
Page8
内蔵ロジック
ロジック31b
ロ ボットと人間が作業場所を共用する場合のロジックです。同時に両者が作業台に共存する場合、もしくは直接人間が
ロボットがある区域に侵入する場合にロボットを停止します。自動リセットと手動リセットのいずれかを選択できます。
ロジック回路 安全システムの構成例
安全入力1 二重化直接
T0-X0, 開路入力 安全入力 6
T1-X1 安全出力 1/2
&
安全入力2
T2-X2, 二重化安全入力Ⅱ
T3-X3
安全入力 ≥1 安全出力1
3 Y0
T4-X4, 二重化直接 & ホールド ホールド
T5-X5 開路入力 Y1
& 自己保持 安全出力
安全入力4 安全入力 3
T6-X6, 二重化安全入力Ⅱ トリガ EDM 安全入力
T7-X7 安全入力 4
1
安全入力5
T10-X10, 二重化直接 安全出力
開路入力 2 作業台
T11-X11 Y2
ホールド
安全入力6
T12-X12, 二重化直接 安全出力 Y3
開路入力 (オフディレー 安全入力 2
T13-X13 タイマ付)
EDM
リセット入力1
X16 モニタ入力
リセット
OR セレクタ
リセット入力2 モニタ入力 コントロール 安全入力 5
X17 Control スタート
外部デバイス
モニタ1 EDM 外部デバイス
T14-X14 モニタ入力
外部デバイス
モニタ2 EDM 外部デバイス
T15-X15 モニタ入力
ロジック31C
ラ イトカーテンなどに防護された危険区域にワークが搬送されるミューティング機能付き制御ロジックです。ライト
カーテンにミューティング機能がない場合にFS1B形でミューティングが可能です。自動リセットと手動リセットの
いずれかを選択できます。
ロジック回路 安全システムの構成例
安全入力1
T0-X0, 二重化安全入力Ⅱ 安全入力 安全入力 3
T1-X1
ミューティングⅡ
ミューティング
入力1 ミューティング入力 ミューティング(∞) ミューティングランプ ミューティングランプ
X2, X3 入力
安全入力2
T4-X4, 二重化安全入力Ⅱ 安全入力 安全入力 1 安全出力 1/2 安全入力 2
T5-X5 安全出力1
ミューティングⅡ
ミューティング
入力2 ミューティング入力 ミューティング(∞) & Y0
ホールド ホールド
X6, X7 入力 Y1
自己保持 安全出力
安全入力3
T10-X10, 二重化直接 トリガ EDM
T11-X11 開路入力 ミューティング入力 1 ミューティング入力 2
安全入力4 安全出力2
T12-X12, 二重化直接 Y2
T13-X13 開路入力 ホールド
安全出力 Y3
(オフディレー
リセット入力1
X16 モニタ入力 タイマ付)
安全入力 4
リセット EDM
OR セレクタ
リセット入力2
X17 モニタ入力 Control コントロールスタート
外部デバイス
モニタ1 EDM 外部デバイス
T14-X14 モニタ入力
外部デバイス
モニタ2 EDM 外部デバイス
T15-X15 モニタ入力
8
Page9
内蔵ロジック
ロジック31d
開口部が2つある工作機械などの制御ロジックです。保守時に危険区域内で機器を稼働しなが 安全システムの構成例
ら作業するためにティーチモードとオートモードが切替え可能です。部分停止制御が可能です。
ティーチモード
安全入力 5
ロジック回路
安全出力 3
(システム全体停止用安全出力)
安全出力3
安全入力5
T10-X10, 二重化直接 Y3
T11-X11 開路入力 ホールド ホールド
安全出力
自己保持 1-1/1-2
安全出力
安全入力2 安全出力 2
T2-X2, 二重化連動 トリガ EDM
入力
T3-X3 & 安全入力 4
ティーチモード(X0)
安全入力1
T0-X0, モードセレクト ホールド
X1 入力Ⅱ
オートモード(X1) 自己保持
安全入力
安全入力 3
3
T4-X4, 二重化直接 & 安全入力 2
トリガ イネーブルスイッチ
T5-X5 開路入力 安全出力1-1
& ホールド Y0
安全入力4
T6-X6, 二重化直接 ホールド
T7-X7 開路入力 ≥1 安全出力
自己保持
EDM
リセット入力1 オートモード
X16 モニタ入力 トリガ
安全出力1-2 安全入力 5
Y1
リセット入力2
X17 Control コントロール
ホールド
モニタ入力 安全出力
スタート & 3
安全出力 (システム全体停止用安全出力)
(オフディレー
タイマ付)
外部デバイス EDM
モニタ1 EDM 外部デバイス
T12-X12 モニタ入力 安全出力 1-1/1-2
安全出力 2
外部デバイス (オートモード用外部デバイス )
モニタ2 EDM 安全出力2
T13-X13 モニタ入力
Y2 安全入力 4
ホールド
外部デバイス
モニタ3 EDM 外部デバイス
モニタ入力 安全出力 安全柵
T14-X14
EDM
外部デバイス
モニタ4 EDM 外部デバイス
モニタ入力 安全入力 3
T15-X15
ロジック302
複数の非常停止機器と複数の開口部がある生産設備で、部分停止制御が必要な場合の
制御ロジックです。自動リセットと手動リセットのいずれかを選択できます。
ロジック回路 安全システムの構成例
安全入力1 二重化直接
T0-X0, 開路入力
T1-X1 安全出力 1 安全入力 3
安全出力1
安全入力2 (システム全体停止用安全出力)
T2-X2, 二重化直接 Y0
開路入力 & ホールド ホールド
T3-X3 安全出力 Y1
自己保持 (オフディレー
安全入力3 タイマ付)
T4-X4, 二重化直接 安全出力 2
T5-X5 開路入力 トリガ EDM
安全入力4
T6-X6, 二重化安全入力Ⅱ
T7-X7 安全出力2
Y2
安全入力5
& & ホールド
X10, 二重化安全入力Ⅱ ホールド 安全出力 Y3
X11 (オフディレー
自己保持 タイマ付)
安全入力6 EDM
X12, 二重化安全入力Ⅱ トリガ
X13
安全入力 5
リセット入力1
X16 モニタ入力
リセット
OR セレクタ
リセット入力2
X17 モニタ入力 Control コントロール 安全入力 1 安全入力 2
スタート
外部デバイス
モニタ1 外部デバイス
EDM
T14-X14 モニタ入力
外部デバイス
モニタ2 外部デバイス
EDM モニタ入力
T15-X15
9
安全入力 4
安全柵
安全入力 6
Page10
内蔵ロジック
ロジック32A
両手操作による起動が必要な機械の制御ロジックです。非常停止機器やライトカーテンなどの安全条件が揃った後に両手操作すること
で機械が起動します。ライトカーテンはミューティング機能対応で、両手操作の監視はtypeⅢCの要求を満たします。
• 安全入力2は初期設定値と異なる(コンフィグレーション後の)入力ファンクションで例を示しています。
ロジック回路 安全システムの構成例
安全入力1 二重化連動 安全入力 1
T0-X0, 入力
T1-X1 安全出力
安全入力2 安全出力 1
1
ミューティングランプ (システム全体停止用安全出力)
T2-X2, 二重化安全入力Ⅱ Y0
T3-X3 & ホールド ホールド
Y1
自己保持 安全出力 安全出力 2
安全入力3
X4, X5 二重化安全入力Ⅱ 安全入力 安全入力 3
トリガ EDM
ミューティングⅡ
ミューティング
入力 ミューティング入力 ミューティング(∞)
X6, X7 入力
安全入力4 安全出力2
T10-X10, 二重化 安全入力1 Y2
T11-X11 NO/NC入力 両手操作 & ホールド
入力 Y3 ミューティング入力
安全入力5 TypeⅢC 安全出力
T12-X12, 二重化
T13-X13 NO/NC入力
安全入力2 安全入力 2
EDM
安全入力 4 と 安全入力 5
リセット入力1 モニタ入力
X17 Control コントロールスタート
外部デバイス
モニタ1 EDM 外部デバイス
T14-X14 モニタ入力
外部デバイス
モニタ2 EDM 外部デバイス
T15-X15 モニタ入力
ロジック32b 安全システムの構成例
安全入力 1 安全入力 1
安全出力 1 安全出力 1
二重化したインターロックを2組使用する制御ロジックです。ロボットと人間が作業場所を (システム全体停止用安全出力) (システム全体停止用安全出力)
共用し、同時に両者が作業台に共存する場合にロボットを停止します。
安全出力 2 安全出力 2
• 安全入力2、4は初期設定値と異なる(コンフィグレーション後の)入力ファンクションで例を示しています。
安全入力 2 安全入力 2
安全入力 3 安全入力 3
ロジック回路 安全入力 4 安全入力 4
作業台 作業台
安全入力1 二重化連動 安全出力1
T0-X0,
T1-X1 入力 & Y0
ホールド ホールド
Y1
安全入力2 二重化連動 自己保持 安全出力 安全入力 5
X2, X3 入力 安全入力 5
≥1 ≥1 トリガ EDM
安全入力3
X4, X5 二重化安全入力Ⅱ 安全入力 6 安全入力 6
≥1 安全入力 1 安全入力 1
安全入力4 二重化連動
X6, X7 入力 安全出力 1 安全出力 1
≥1 (システム全体停止用安全出力) 安全出力2 (システム全体停止用安全出力)
安全入力5 & & Y2
X10, X11 二重化安全入力Ⅱ ホールド
安全出力 2 安全出力 Y3
(オフディレー 安全出力 2
安全入力6 タイマ付)
T12-X12, 二重化連動 安全入力 2
入力 EDM 安全入力 2
T13-X13
= =
制御入力 1 1
モニタ入力
X16 &
安全入力 3 安全入力 3
リセット入力 モニタ入力
X17 Control コントロールスタート 安全入力 4 安全入力 4
作業台 作業台
外部デバイス
モニタ1 EDM 外部デバイス
T14-X14 モニタ入力
外部デバイス
モニタ2 EDM 外部デバイス 安全入力
T15-X15 モニタ入力 5
安全入力 5
安全入力 6 安全入力 6
10
Page11
内蔵ロジック
ロジック32C
ロボットと人間が作業場所を共用する場合の制御ロジックです。同時に両者が作業台に共存
する場合にはロボットを停止します。作業台は2か所まで監視できます。
ロジック回路 安全システムの構成例
安全出力
安全入力 1
1 二重化連動 安全出力1
T0-X0, 安全入力 1 (システム全体停止用安全出力)
入力 Y0
T1-X1 & ホールド ホールド
Y1
安全入力2 自己保持 安全出力
二重化安全入力Ⅱ
X2, X3
≥1 ≥1 トリガ EDM
安全入力3 二重化安全入力Ⅱ 安全入力 2
X4, X5
& 作業台
安全入力4
X6, X7 二重化安全入力Ⅱ
≥1 安全出力2
&
安全入力5 & Y2
二重化安全入力Ⅱ ホールド
X10, X11 安全入力 3
安全出力 Y3
(オフディレー
安全入力6 安全出力 2
二重化連動 タイマ付)
T12-X12, 入力 EDM
T13-X13
=
制御入力 1 =1
モニタ入力
X16 &
安全入力 4
リセット入力 モニタ入力 Control コントロール
X17 スタート
外部デバイス 作業台
モニタ1 EDM 外部デバイス
T14-X14 モニタ入力
外部デバイス 安全入力 5
モニタ 外部デバイス
2 EDM モニタ入力
T15-X15
安全入力 6
ロジック32d
開口部が2つある工作機械などの制御ロジックです。保守時に危険区域内で機器を稼働 安全システムの構成例
しながら作業するためにティーチモードとオートモードが切替え可能です。ティーチモー
ドのみ、もしくはオートモードのみで稼働する機械を制御します。 ティーチモード
ロジック回路 安全入力 5
安全入力5 二重化直接 安全出力1 安全出力 1
T10-X10, 開路入力 ホールド Y0 (ティーチモード用)
T11-X11 ホールド
自己保持 & 安全出力 2-1/2-2
安全出力 安全出力
安全入力 3
2 二重化連動
T2-X2, トリガ
入力 安全入力 4
T3-X3 & EDM
ティーチモード(X0)安全入力1
モードセレクト ホールド
T0-X0,
X1 入力Ⅱ
オートモード(X1) 自己保持 安全入力 3
安全入力3 & 安全入力 2
T4-X4, 二重化直接 トリガ イネーブルスイッチ
開路入力
T5-X5 安全出力2-1
Y1
安全入力4 & ホールド
T6-X6, 二重化直接 ホールド ≥1
T7-X7 開路入力 安全出力
自己保持
EDM
リセット入力1 オートモード
モニタ入力
X16 トリガ
安全出力2-2
Y2
リセット入力2 ホールド
モニタ入力 Control コントロール 安全入力 5
X17 スタート & 安全出力
(オフディレー
タイマ付)
外部デバイス EDM 安全出力 1
モニタ1 EDM 外部デバイス 安全出力 2-1/2-2
T12-X12 モニタ入力 安全出力 3
(オートモード用)
外部デバイス
モニタ2 EDM 外部デバイス 安全出力
モニタ入力 3 安全入力 4
T13-X13 Y3
ホールド
外部デバイス
外部デバイス 安全柵
モニタ3 EDM 安全出力
T14-X14 モニタ入力
EDM
外部デバイス
モニタ4 外部デバイス 安全入力
EDM 3
T15-X15 モニタ入力
11
安全柵
Page12
内蔵ロジック
ロジック303
安全システムの構成例
開口部がある工作機械などの制御ロジックです。保守時に危険区域内で機器を稼働しな
がら作業するためにティーチモードとオートモードが切替え可能です。イネーブル装置を ティーチモード
使った2名同時作業が可能です。また部分停止制御が可能です。 安全入力 6
安全出力 2
• 安全入力5は初期設定値と異なる(コンフィグレーション後の)入力ファンクションで例を示しています。 (システム全体停止用安全出力)
安全出力 1
安全入力 2
ロジック回路
イネーブル
スイッチ
安全入力5 二重化連動 安全出力2
X10, X11 入力
& Y2
ホールド ホールド
安全出力 Y3 安全入力 5
安全入力6 自己保持 (オフディレー
T12-X12, 二重化連動 安全入力
タイマ付) 3
安全入力 4 イネーブル
T13-X13 入力 トリガ EDM スイッチ
安全入力2
T2-X2, 二重化連動
T3-X3 入力
& ホールド
安全入力3
T4-X4, 二重化連動 自己保持
T5-X5 入力 安全出力1 オートモード
トリガ
安全入力1 ティーチモード(X0) ホールド 安全入力 6
T0-X0, モードセレクト ≥1 & Y0
安全出力 Y1
X1 入力Ⅱ (オフディレー 安全出力 2
オートモード(X1) タイマ付) (システム全体停止用安全出力)
安全入力4 & ホールド EDM
T6-X6, 二重化直接
T7-X7 開路入力 自己保持 安全出力 1
リセット入力1 トリガ
X16 モニタ入力
リセット入力1 モニタ入力
X17 Control コントロールスタート
外部デバイス
モニタ1 外部デバイス 安全柵
EDM
T14-X14 モニタ入力
安全入力 5
外部デバイス 安全入力 2
モニタ2 EDM 外部デバイス
T15-X15 モニタ入力 安全入力 4
ロジック33A
安全システムの構成例
開口部が2つあるロボット設備などの制御ロジックです。保守時に危険区域内で機器を稼働
しながら作業するためにティーチモードとオートモードが切替え可能です。 ティーチモード
安全入力 6
ロジック回路
安全出力 1/2
安全入力5 二重化直接 安全入力 4
T10-X10, 開路入力
T11-X11 & ホールド
安全入力6 自己保持 イネーブル
T12-X12, 二重化直接 スイッチ
T13-X13 開路入力
トリガ 安全入力 2
安全入力2
T2-X2, 二重化連動
入力 安全入力 5
T3-X3 & ホールド 安全入力 3
安全入力1 ティーチモード(X0)
モードセレクト 自己保持
T0-X0, 入力Ⅱ
X1 安全出力1
オートモード(X1) トリガ & Y0 オートモード
安全入力3 ホールド
T4-X4, 二重化連動
入力 & ≥1 Y1
安全出力 安全入力
T5-X5 6
安全入力4 ホールド EDM
T6-X6, 二重化連動
T7-X7 入力 自己保持
安全出力2
リセット入力1 トリガ Y2
X16 モニタ入力 ホールド 安全出力 1/2
安全出力 Y3
(オフディレー
タイマ付)リセット入力1 安全入力 4
モニタ入力 Control コントロールX17 スタート EDM
外部デバイス
モニタ1 EDM 外部デバイス
T14-X14 モニタ入力
安全柵
外部デバイス
モニタ2 EDM 外部デバイス
T15-X15 モニタ入力
安全入力 5
安全入力 3
12
安全柵
Page13
内蔵ロジック
ロジック33b
安全システムの構成例
開口部が2つあるロボット設備などの制御ロジックです。保守時に
危険区域内で機器を稼働しながら作業するためにティーチモードと ティーチモード
オートモードが切替え可能です。オートモードでは、ロボットと作業者 安全入力 6
が共有する作業スペースがあり、同時に共存するとロボットを停止し
ます。
安全出力 1/2
ロジック回路
安全入力6 二重化直接 イネーブル
T12-X13, 開路入力 ホールド スイッチ
T13-X13
自己保持
安全入力 2
安全入力2
T2-X2, 二重化連動 トリガ
T3-X3 入力
ティーチモード(X0) &
安全入力1 モードセレクト 安全入力 3
T0-X0, X1 入力Ⅱ
オートモード(X1) ホールド
安全入力 オートモード
3
T4-X4, 二重化直接 自己保持
T5-X5 開路入力 安全出力1 安全入力 6
トリガ
& ホールド Y0
安全入力4 二重化安全入力Ⅱ
X6, X7 ≥1 &
安全出力 Y1
≥1 ホールド EDM
安全入力5
X10, X11 二重化安全入力Ⅱ
自己保持 安全出力 1/2
安全出力2
リセット入力1 トリガ Y2
モニタ入力 ホールド
X16
安全出力 Y3
(オフディレー
タイマ付)リセット入力2 モニタ入力
X17 Control コントロールスタート EDM
外部デバイス
モニタ1 外部デバイス
EDM
T14-X14 モニタ入力
安全柵
外部デバイス
モニタ2 EDM 外部デバイス
T15-X15 モニタ入力
安全入力 3
ロジック33C
安全システムの構成例
開口部が2つある工作機械などの制御ロジックです。保守時に危険区域内で機器を稼働しな
がら作業するためにティーチモードとオートモードが切替え可能です。両方のモードで稼働す モード1
る機械やそれぞれのモードでのみ稼働する機械があり、部分停止制御が可能です。
安全出力 1-1/1-2 安全入力 2
(システム全体停止用安全出力)
ロジック回路 安全出力2
(モード 1用)
安全出力1-1 安全出力 3
安全入力2 二重化直接 Y0
T2-X2, ホールド 安全入力 5
開路入力 ホールド
T3-X3
自己保持 安全出力
安全入力3 二重化連動
T4-X4, トリガ EDM
入力
T5-X5 & 安全入力 4
モード1(X0)
安全出力1-2
Y1 安全入力 3
安全入力1 モードセレクト ホールド ホールド イネーブルスイッチ
T0-X0, X1 入力Ⅱ 安全出力
モード2(X1) 自己保持 (オフディレー
タイマ付)
安全入力4 二重化直接 &
T6-X6, トリガ EDM
T7-X7 開路入力
安全出力2
安全入力5 Y2
二重化連動 & ホールド モード2
T10-X10, 入力 ホールド
T11-X11 安全出力
自己保持 安全出力 1-1/1-2
リセット入力1 安全入力 2
モニタ入力 EDM (システム全体停止用安全出力)
X16 トリガ
安全出力3
Y3 安全出力 2
リセット入力2 ホールド
モニタ入力 Control コントロール & 安全出力 3
X17 スタート
安全出力 (モード 2用)
安全入力
EDM 5
外部デバイス
モニタ 外部デバイス
1 EDM モニタ入力
T12-X12 安全柵
外部デバイス
モニタ2 EDM 外部デバイス
T13-X13 モニタ入力
安全入力 4
外部デバイス
モニタ3 外部デバイス
EDM
T14-X14 モニタ入力
外部デバイス
モニタ4 外部デバイス
EDM
T15-X15 モニタ入力
13
安全入力 5
安全入力 5
安全柵 作業台
作業台
安全入力 4
安全入力 4
Page14
内蔵ロジック
ロジック33d ロジック回路
安全入力6
T12-X12, 二重化直接 ホールド
T13-X13 開路入力
保守時に危険区域内で機器を 自己保持
安全入力3 二重化連動
T4-X4, トリガ
稼働しながら作業するために 入力
T5-X5
ティーチモードとオートモード 安全入力 &
4 二重化連動
T6-X6, 入力
T7-X7
が切替え可能な制御ロジック ティーチ1(X0)
安全入力1 モードセレクト ≥1 ホールド
T0-X0,
で、2種類のティーチモードを
入力Ⅱ 自己保持
X1 ティーチ2(X1) 安全出力1
利用することができます。 & トリガ
安全入力2 ティーチモード(X2)
T2-X2, モードセレクト & Y0
ホールド
入力Ⅱ ≥1 Y1
• 安 全入力5は初期設定値と異なる(コン X3 安全出力
オートモード(X3)
フィグレーション後の)入力ファンクショ 安全入力5 EDM
ンで例を示しています。 X10-X10, 二重化連動
入力 & ホールド
T11-X11
自己保持 安全出力2
リセット入力1
X16 モニタ入力 Y2
トリガ ホールド
安全出力 Y3
リセット入力2 (オフディレー
モニタ入力
X17 Control コントロールスタート タイマ付)
EDM
外部デバイス
モニタ1 外部デバイス
EDM
T14-X14 モニタ入力
外部デバイス
安全システムの構成例 モニタ2 EDM 外部デバイス
T15-X15 モニタ入力
ティーチ1モード ティーチ2モード オートモード
安全入力 6 安全入力 6 安全入力 6
安全出力 1/2 安全出力 1/2 安全出力 1/2
安全入力 3 安全入力 4
イネーブル イネーブル
スイッチ スイッチ
A B 安全柵
安全入力 5 安全入力 5
安全入力 5
ティーチモード オートモード ティーチ 1 ティーチ 2 ティーチモード オートモード ティーチ 1 ティーチ 2 ティーチモード オートモード
安全入力 1 安全入力 2 安全入力 1 安全入力 2 安全入力 1
ロジック304
安全システムの構成例
保守時に危険区域内で機器を稼働しながら作業するためにティーチモードとオートモード
を切替え可能な制御ロジックです。加えて、両方のモードで稼働する保護カバー付きの機械 ティーチモード
を制御できます。部分停止制御です。 安全入力 4
安全出力 2
(システム全体停止用安全出力)
ロジック回路
安全出力2 安全出力 1-1/1-2
安全入力4
T6-X6, 二重化直接 Y2
開路入力 ホールド ホールド
T6-X6
自己保持 安全出力
安全入力2
T2-X2, 二重化連動 トリガ EDM 安全出力 3
入力 & (コンベヤ用)
T3-X3
安全出力1-1
ティーチモード(X0) Y0 安全入力 5
安全入力1 モードセレクト ホールド & ホールド
T0-X0, 入力Ⅱ
X1 安全入力
自己保持 ≥1 3
オートモード( 安全出力
X1) 安全入力 2
安全入力3 二重化直接 & トリガ EDM イネーブルスイッチ
T4-X4, 開路入力
T5-X5
安全出力1-2
安全入力5 二重化直接 Y1
T10-X10,
T11-X11 開路入力 ホールド ホールド
安全出力
自己保持 (オフディレー オートモード
リセット入力 タイマ付)1
X16 モニタ入力 トリガ EDM 安全入力 4
安全出力3 安全出力 2
リセット入力2 (システム全体停止用安全出力)
モニタ入力 Y3
Control コントロール ホールド
X17 スタート ホールド &
安全出力
自己保持 安全出力 1-1/1-2
外部デバイス
モニタ1 外部デバイス
EDM トリガ EDM
T12-X12 モニタ入力
外部デバイス
モニタ2 外部デバイス
EDM モニタ入力 安全出力 3
T13-X13 (コンベヤ用)
外部デバイス
モニタ3 外部デバイス 安全柵
EDM 安全入力 5
T14-X14 モニタ入力
外部デバイス
外部デバイス 安全入力 3
モニタ4 EDM
T15-X15 モニタ入力
14
Page15
内蔵ロジック
ロジック34A
ライトカーテンなどに防護された危険区域にワークが搬送されるミューティング機能付き
制御ロジックです。ライトカーテンにミューティング機能がない場合にFS1B形でミューティング
が可能です。ミューティング時に停止する機械があります。
• 安 全入力3、4は初期設定値と異なる(コンフィグレーション後の)入力ファンクションで例を示しています。
ロジック回路
安全システムの構成例
安全出力3
安全入力1
T0-X0, 二重化連動 Y2
入力 ホールド 安全出力 3
安全入力 1 (システム全体停止用安全出力)
T1-X1 ミューティングランプ
安全出力
安全入力2
T2-X2, 二重化連動 & 安全出力 1 電源用
EDM 安全出力
入力 4
T3-X3 (ミューティング中はOFF)
安全出力 2 操作許可用
安全入力 3 安全入力 4
安全入力3 二重化連動 &
X4, X5 入力 & 安全出力1
& ホールド Y0
安全入力4 安全出力
T6-X6, 二重化安全入力Ⅱ 安全入力
T7-X7 EDM
ミューティングⅡ ミューティング入力
ミューティング 安全出力2
入力 ミューティング入力 ミューティング(∞)
入力 & & Y1
X10, X11 ホールド
安全出力
(オフディレー
タイマ付)
制御入力1
X16 モニタ入力 EDM
安全入力 2
制御入力2 安全出力4
X17 モニタ入力
Y3
ホールド
外部デバイス
モニタ1 EDM 外部デバイス 安全出力
T12-X12 モニタ入力 (オフディレー
タイマ付)
外部デバイス
モニタ2 外部デバイス EDM
EDM
T13-X13 モニタ入力
外部デバイス
モニタ3 EDM 外部デバイス
T14-X14 モニタ入力
外部デバイス
モニタ4 EDM 外部デバイス
T15-X15 モニタ入力
ロジック34b
ライトカーテンなどに防護された危険区域にワークが搬送されるミューティング機能付き
制御ロジックです。ライトカーテンにミューティング機能がない場合にFS1B形でミューティング
が可能です。ワークや機械の位置によりロボットを起動させない制御が可能です。
ロジック回路 安全システムの構成例
安全入力1 安全入力 1
二重化連動 安全出力1
T0-X0, 入力
T1-X1 & ホールド Y0
ホールド 安全出力 1/2
安全入力2 (システム全体停止用安全出力)
T2-X2, 二重化連動 自己保持 安全出力 ミューティングランプ
入力
T3-X3
トリガ EDM 安全出力3-1/3-2
制御入力 モニタ入力
X4 安全出力2 安全入力 3
安全入力3 & Y1
ホールド
X6, X7 二重化安全入力Ⅱ 安全入力 安全出力
(オフディレー
ミューティングⅡ タイマ付)
ミューティング EDM
入力 ミューティング入力 ミューティング(∞)
X10, X11 入力 安全出力3-1
Y2 ミューティング入力
リセット入力1 ホールド ホールド
X16 モニタ入力
=1 自己保持 安全出力
リセット入力2 モニタ入力 Control コントロール トリガ EDM
X17 スタート
リセット入力3 =1 安全出力3-2 安全入力 2
モニタ入力
X5 ホールド Y3
外部デバイス 安全出力
モニタ (オフディレー
1 EDM 外部デバイス
タイマ付)
T12-X12 モニタ入力
EDM
外部デバイス
モニタ2 EDM 外部デバイス
T13-X13 モニタ入力
外部デバイス
モニタ3 EDM 外部デバイス
T14-X14 モニタ入力
外部デバイス
モニタ4 EDM 外部デバイス
T15-X15 モニタ入力
15
Page16
内蔵ロジック
ロジック34C
保守時に危険区域内で機器を稼働しながら作業するためにティーチモードとオートモード 安全システムの構成例
が切替え可能です。オートモードで稼働する機械を、ティーチモード時に限定的に稼働許可
することができます。 ティーチモード
• 安 全入力2、3、4、5は初期設定値と異なる(コンフィグレーション後の)入力ファンクションで例を示しています。 安全入力 5
安全出力 1
(システム全体停止用安全出力)
ロジック回路
安全出力 2
電源用
安全出力1 および
安全入力4 二重化連動 Y0 安全出力 3-1/3-2
X6, X7 入力 ホールド ホールド 操作許可用
自己保持 安全出力
イネーブル
安全入力5 二重化連動
X10, X11 トリガ EDM スイッチ
入力 &
ティーチモード(X0) 安全出力2 安全入力 2
安全入力1 モードセレクト Y1
T0-X0, X1 入力Ⅱ オートモード(X1) ≥1 ホールド ホールド
自己保持 安全出力
安全入力 3 安全入力 4
トリガ EDM
安全入力3 二重化連動 &
X4, X5 入力 安全出力3-1
Y2
ホールド
安全入力2 二重化連動 &
X2, X3 入力 ホールド 安全出力 オートモード
自己保持
リセット入力1 EDM
モニタ入力 安全入力 5
X16 トリガ
≥1 安全出力3-2
ホールド Y3 安全出力 1
(システム全体停止用安全出力)
リセット入力2
X17 モニタ入力 Control コントロール 安全出力
スタート ホールド (オフディレー
タイマ付)
外部デバイス 自己保持 安全出力 2
外部デバイス EDM 電源用
モニタ1 EDM モニタ入力 および
T12-X12 トリガ 安全出力 3-1/3-2
操作許可用
外部デバイス
モニタ2 EDM 外部デバイス
T13-X13 モニタ入力
外部デバイス
モニタ3 EDM 外部デバイス
T14-X14 モニタ入力 安全柵
外部デバイス
モニタ4 EDM 外部デバイス
T15-X15 モニタ入力
安全入力 3 安全入力 4
ロジック34d 安全システムの構成例
安全入力 1
ロボットと人間が作業場所を共用する場合の制御ロジックです。
同時に両者が作業台に共存する場合にはロボットを部分停止します。 安全出力 1
(システム全体停止用安全出力)
ロジック回路 安全出力 2 電源用
安全出力 3-1/ 3-2 操作許可用 安全入力 4
安全入力1 二重化連動 安全出力1
T0-X0, 入力 ホールド
T1-X1 Y0
& ホールド
自己保持
安全入力2 二重化連動 安全出力
T2-X2, 入力 トリガ
T3-X3 EDM
安全入力3 二重化安全入力Ⅱ 安全出力
X4, X5 2
ホールド Y1
≥1 & ホールド
安全入力4 自己保持
二重化連動 安全出力
T6-X6, 入力 (オフディレー 安全入力 2
T7-X7 トリガ タイマ付)
EDM
リセット入力1 モニタ入力
X10
ホールド 安全出力3-1 安全入力 1
Y2
リセット入力2 自己保持 ホールド
X11 モニタ入力 &
安全出力 1
トリガ 安全出力 (システム全体停止用安全出力)
リセット入力3 モニタ入力 Control コントロール EDM
X16 スタート 安全出力 2 電源用
安全出力3-2
Y3 安全出力 3-1/ 3-2 操作許可用 安全入力 4
制御入力 モニタ入力 ホールド
X17
安全出力
外部デバイス (オフディレー
モニタ1 EDM 外部デバイス タイマ付)
T12-X12 モニタ入力 EDM
外部デバイス
モニタ2 EDM 外部デバイス
T13-X13 モニタ入力
外部デバイス
モニタ3 EDM 外部デバイス
T14-X14 モニタ入力
外部デバイス
モニタ4 EDM 外部デバイス
モニタ入力 安全入力 2
T15-X15
16
安全入力 3
安全入力 3
作業台 作業台
Page17
内蔵ロジック
ロジック305
それぞれ開口部をもった複数の独立した危険源のための制御ロジックで、開口(例:ライトカーテンの遮光)した際には個別の機械を部分
停止します。非常停止機器の操作では全てを停止します。• 安全入力1は初期設定値と異なる(コンフィグレーション後の)入力ファンクションで例を示しています。
ロジック回路
安全入力1 二重化連動 安全出力1
ホールド
X0, X1 入力
自己保持 & Y0
ホールド
トリガ 安全出力
安全入力2 EDM
X2, X3 二重化安全入力Ⅱ ホールド
自己保持 安全出力2
トリガ Y1
& ホールド
安全出力
安全入力3
X4, X5 二重化安全入力Ⅱ ホールド
自己保持 EDM 安全システムの構成例
トリガ 安全出力3
& ホールド Y2
安全入力4 安全出力 1 安全出力 2 安全出力 3 安全出力 4
二重化安全入力Ⅱ
X6, X7 ホールド 安全出力
自己保持
EDM
トリガ
安全出力4
安全入力5 Y3
X10, X11 二重化安全入力Ⅱ ホールド & ホールド
自己保持
安全出力
トリガ
リセット入力1 モニタ入力 EDM 安全出力 2 安全出力 3 安全出力 4 安全出力 5
X16
リセット入力2 モニタ入力 安全入力
X17 Control コントロール 1
スタート
外部デバイス
モニタ1 EDM 外部デバイス
T12-X12 モニタ入力
外部デバイス
モニタ2 EDM 外部デバイス
T13-X13 モニタ入力
外部デバイス
モニタ3 EDM 外部デバイス
T14-X14 モニタ入力
外部デバイス
モニタ4 EDM 外部デバイス
T15-X15 モニタ入力
ロジック306
それぞれ開口部をもった複数の従属した危険源のための制御ロジックで、機械によっては関連する他の機械も停止します。非常停止機器の
操作では全てを停止します。 • 安 全入力1は初期設定値と異なる(コンフィグレーション後の)入力ファンクションで例を示しています。
ロジック回路
安全入力1 二重化連動
X0, X1 入力 ホールド
自己保持
トリガ 安全出力1
Y0
& ホールド
安全入力2
X2, X3 二重化安全入力Ⅱ ホールド 安全出力
自己保持
トリガ EDM
安全出力2
& Y1
ホールド
安全入力3
X4, X5 二重化安全入力Ⅱ ホールド 安全出力
自己保持 安全システムの構成例
トリガ EDM
安全出力3
& Y2
ホールド 安全入力 1 安全入力 2 安全入力 3 安全入力 4
安全入力4 二重化安全入力Ⅱ ホールド
X6, X7 安全出力
自己保持
トリガ EDM
安全出力4
Y3
安全入力 & ホールド
5
二重化安全入力Ⅱ ホールド 安全出力
X10, X11 (オフディレー
自己保持 タイマ付)
リセット入力1 トリガ EDM 安全入力 2 安全入力 3 安全入力 4 安全入力 5
X16 モニタ入力
リセット入力2 モニタ入力
X17 Control コントロールスタート 安全入力 1
外部デバイス
モニタ1 EDM 外部デバイス
T12-X12 モニタ入力
外部デバイス
モニタ2 EDM 外部デバイス
T13-X13 モニタ入力
外部デバイス
モニタ3 EDM 外部デバイス
T14-X14 モニタ入力
外部デバイス
モニタ EDM 外部デバイス
4
T15-X15 モニタ入力
17
Page18
内蔵ロジック
ロジック307
それぞれ2つの開口部をもった2つのロボット設備のための制御ロジックで、部分停止が可能
です。非常停止機器の操作では両方とも停止します。
ロジック回路
安全入力1 安全出力1-1
T0-X0, 二重化直接 Y0
T1-X1 開路入力 ホールド ホ
自己保持 & ールド
トリガ 安全出力
安全入力2 二重化直接
T2-X2, 開路入力 EDM
T3-X3 安全出力1-2
& ホールド Y1
安全入力3 ホールド 安全システムの構成例
二重化直接 自己保持
T4-X4, 安全出力
開路入力
T5-X5 トリガ (オフディレー
タイマ付)
& EDM 安全入力 1
安全入力4 二重化直接 安全出力2-1
T6-X6, 開路入力
T7-X7 ホールド Y2
ホールド
& 自己保持
安全入力 安全出力
5 安全出力 1-1/1-2 安全出力 2-1/2-2
二重化直接 トリガ
T10-X10, 開路入力
T11-X11 EDM
安全出力2-2
Y3
リセット入力1 モニタ入力 ホールド
X16 安全出力
OR リセット (オフディレー
リセット入力2 セレクタ タイマ付)
X17 モニタ入力 Control コントロール 安全入力 安全入力
2 5
スタート EDM
外部デバイス
モニタ1 EDM 外部デバイス
T12-X12 モニタ入力
外部デバイス
モニタ2 EDM 外部デバイス 安全入力 3 安全入力 4
T13-X13 モニタ入力
外部デバイス
モニタ3 EDM 外部デバイス
T14-X14 モニタ入力
外部デバイス
モニタ4 EDM 外部デバイス
モニタ入力
T15-X15
ロジック308
保守時に危険区域内で機器を稼働しながら作業するためにティーチモードとオートモード 安全システムの構成例
が切替え可能な制御ロジックです。加えて、両方のモードで稼働する保護カバー付きの機械
を制御できます。 ティーチモード
• 安 全入力5は初期設定値と異なる(コンフィグレーション後の)入力ファンクションで例を示しています。
安全入力 4
ロジック回路
安全出力 1-1/1-2
安全入力4 二重化直接
T6-X6, 開路入力 ホールド
T7-X7
自己保持
安全入力2 安全出力 2-1/2-2
T2-X2, 二重化連動 トリガ 安全出力
入力 1-1 (コンベヤ用)
T3-X3 & Y0
ホールド 安全入力 5
ティーチモード(X0)
安全入力1
T0-X0, モードセレクト ホールド 安全出力 安全入力 3
X1 入力Ⅱ 安全入力 2
オートモード(X1) 自己保持 EDM イネーブルスイッチ
安全入力3
T4-X4, 二重化直接 & トリガ 安全出力
T5-X5 開路入力 1-2
Y1
& ホールド
安全入力5 ≥1
X10, 二重化連動 安全出力
(オフディレー
X11 入力 ホールド
タイマ付) オートモード
自己保持 EDM
リセット入力1
X16 モニタ入力 トリガ
安全出力2-1 安全入力 4
Y2
リセット入力2 モニタ入力 Control コントロール & ホールド
X17 スタート ホールド 安全出力 安全出力 1-1/1-2
自己保持
外部デバイス EDM
モニタ1 EDM 外部デバイス
トリガ
T12-X12 モニタ入力
外部デバイス 安全出力 2-1/2-2
外部デバイス 安全出力2-2
モニタ2 EDM (コンベヤ用)
T13-X13 モニタ入力 Y3
ホールド 安全柵 安全入力 5
外部デバイス 安全出力
モニタ (オフディレー
3 EDM 外部デバイス
モニタ入力 タイマ付)
T14-X14
EDM 安全入力 3
外部デバイス
モニタ4 EDM 外部デバイス
T15-X15 モニタ入力
18
Page19
FS1B 形 セーフティコントローラ
プログラムレスで利用可能
● 24パターンの国際安全規格認証済み安全制御ロジックを内蔵
● 部分停止制御やモード切替などすぐ使える定番ロジック
● 接点やセンサなどが接続できるユニバーサル入力
● 認証製品の詳細は当社ホームページをご覧ください。
種類[形番]
本体 販売単位:1個 アクセサリ ご注文形番にてご注文ください。
品名 形番(ご注文形番) 品名 外観 形番(ご注文形番) 販売単位
FS1B 形
セーフティコントローラ FS1B-C31S 入力用コネクタ FS9Z-CN03 1個
標準添付品 出力用コネクタ FS9Z-CN04 1個
• 入力用コネクタ(FS9Z-CN03) ・・・・・・・・・・・・・・・・・ 1個
• 出力用コネクタ(FS9Z-CN04) ・・・・・・・・・・・・・・・・・ 1個
• マーキングタイ ・・・・・・・・・・・・・・・・・・・・・・・・ 1本 マーキングタイ
(*1) FS9Z-MT01 10本入り
*1)マーキングタイ: 本体の保護カバーのロックに使用します。
外形寸法図 (単位:mm)
120°
55
118.8
122.8
標準価格についてはホームページをご覧ください。 19
133.5
7.5 114.5
Page20
FS1B 形 セーフティコントローラ
一般仕様 安全性能
使用環境 IEC 61508の要求に基づく安全性能
使用周囲温度 –10~+55℃(ただし氷結なきこと)
安全出力 PFDavg(*6) PFH(*6) 達成可能な
保存周囲温度 –40~+70℃(ただし氷結なきこと) 最大SIL
使用周囲湿度 5~95%(ただし結露なきこと) 二重化
安全出力 ≦ 9.8 × 10-6 ≦ 1.3 × 10-10 3
保存周囲湿度 5~95%(ただし結露なきこと)
汚損度 2(IEC 60664-1) 一重化
安全出力 ≦ 4.0 × 10-5 ≦ 6.7 × 10-10 2
保護構造 IP20(IEC 60529)
雰囲気 腐食性ガスなきこと *6) 本製品の定期機能診断間隔は10年です。定期機能診断間隔を過ぎた
本製品は交換してください。
大気圧(標高) 動作時:1013~795hPa(0~2000m)
輸送時:1013~701hPa(0~3000m) ISO 13849-1の要求に基づく安全性能
設置場所 IP54以上の制御盤内、屋内専用
装置クラス 開放型装置 安全出力 達成可能な 達成可能な
MTTF
D DCavg 最大カテゴリ 最大PL
過電圧カテゴリ Ⅱ
二重化
5~8.4Hz:3.5mm(ピーク) 安全出力 ≧206年 高 3または4 e
耐振動性 8.4~150Hz:10m/s(2 ピーク)
1オクターブ/分、10掃引、X、Y、Z各方向(IEC 61131-2) 一重化
安全出力 ≧176年(*7) 中 3 d
耐衝撃性 150m/s2 11ms XYZ 3軸6方向各3回
(IEC 61131-2) • 本製品の使命時間は10年です。
EMC耐性 IEC 61131-2ゾーンBに対応 *7)ISO 13849-1の要求により1チャンネル当たりの最大値は100年です。
コネクタ挿抜回数 最大25回
設定スイッチ操作回数 最大100回(1極につき)
エンタボタン操作回数 最大1000回
質量(約) 280g
推定寿命 10年(使用周囲温度40℃時)
電源仕様
定格電圧 DC24V
電圧変動範囲 DC20.4~28.8V(リップルを含む)
消費電力 単体:約6W(DC24V)
最大負荷接続:最大48W(DC24V)
許容瞬断時間 1ms以上(定格電源電圧時)
耐電圧 内部回路-筐体間:AC1000V 1分間
逆極性:破壊しないが動作しない
誤接続の影響 不適切な電圧:永久破壊の可能性あり
不適切な電線の接続:永久破壊の可能性あり
時間仕様
40ms以下(*1)(*5)
オン->オフ ただし、ロジックNo.32bおよびNo.32Cは
応答 50ms以下(*1)(*5)
時間 オフ->オン 100ms以下(*2)
モードセレクト 3s以下(*3)(*5)
起動時間 3s以下(*4)
*1) オフディレータイマ値の設定が即断(0s)の場合、安全入力がオフから
安全出力がオフするまでの時間
*2) オートリセットの場合、安全入力がオンしてから安全出力がオンするまでの
時間
マニュアルリセットの場合、リセット入力がオンしてから安全出力がオンす
るまでの時間(リセット入力のオン時間は0.1s以上)
コントロールリセットの場合、リセット入力がオフ->オン->オフしてから
安全出力がオンするまでの時間(リセット入力のオン時間は0.1s~0.5s)
*3) オフディレータイマ値の設定が即断(0s)の場合、モードセレクトの要求
が発生(例えばセレクタスイッチを操作)してから安全出力がオフするま
での時間
*4) 電源投入から動作ステートに移行するまでの時間
*5) オフディレータイマ値の設定が即断(0s)以外の場合、オフディレー時間
を応答時間にプラスしてください。
オフディレー時間の最大値は“オフディレー時間の設定値”×1.05+0.01s
になります。
TUV Rheinland認証
(適用規格) EN/IEC 61508 Part1-7、EN ISO 13849-1、EN ISO 13849-2、
EN 61000-6-7、EN 61131-2(clause6.1-6.3,8)
(用途規格)IEC 62061
UL認証
UL 508、CSA C22.2 No.142
20