




ロングレンジ、高速、屋外で使用可能
ドイツNerian社のSceneScanはFPGA処理による最新 ステレオカメです。 SceneScanは、ステレオカメラ(Karmin2)と ステレオマッチング 画像処理により、リアルタイムで画像の取得ができます。従来のデプスセンサーとは異なり、発光を必要としないパッシブ技術です。このためり屋外、遠距離測定、他のセンサーとの併用、水中などでも、3次元測定が可能になります。
関連メディア
このカタログについて
| ドキュメント名 | ステレオカメラ SceneScanPro |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 967.1Kb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社ナノシード (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page2
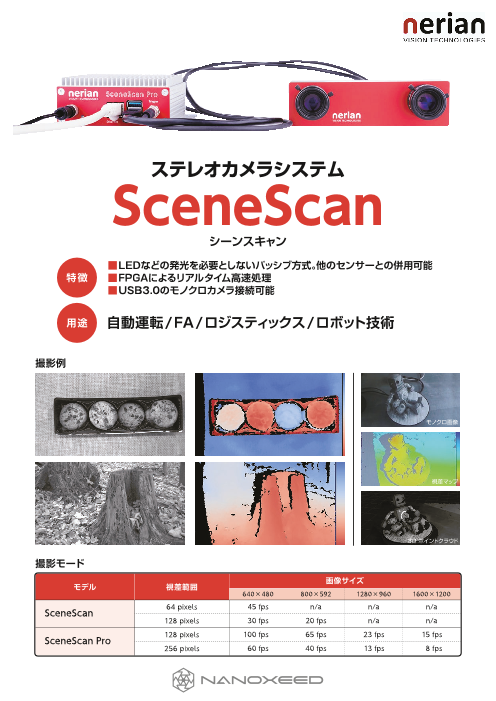
ステレオカメラシステム
SceneScan
シーンスキャン
■LEDなどの発光を必要としないパッシブ方式。他のセンサーとの併用可能
特徴 ■FPGAによるリアルタイム高速処理
■USB3.0のモノクロカメラ接続可能
用途 自動運転/FA/ロジスティックス/ロボット技術
撮影例
モノクロ画像
視差マップ
3D ポイントクラウド
撮影モード
画像サイズ
モデル 視差範囲
640×480 800×592 1280×960 1600×1200
SceneScan 64 pixels 45 fps n/a n/a n/a
128 pixels 30 fps 20 fps n/a n/a
SceneScan Pro 128 pixels 100 fps 65 fps 23 fps 15 fps
256 pixels 60 fps 40 fps 13 fps 8 fps
Page3
用 途
SceneScanはFPGA処理によるステレオカメラシステムです。ステレオマッチング画像処理により、リアルタイムで画像の取得
ができます。従来のデプスセンサーとは異なり、ステレオビジョンは、可視光または近赤外の発光を必要としないパッシブ技術です。
これにより屋外、遠距離測定、他のセンサーとの併用が可能です。プロセッサー部の「SceneScan」(2タイプ)とステレオカメラ
「Karmin2」(2タイプ)を組み合わせて使用します。
ロボット 自動運転 ロジスティクス
レンズ、解像度、フレームレート参照表
レンズ焦点距離 解像度 視差範囲 最短検出距離 FoV フレームレート
6 mm 800 × 592 128 pixels 0.53 m 62° 40 fps
6 mm 1600 × 1200 128 pixels 1.06 m 62° 15 fps
6 mm 1600 × 1200 256 pixels 0.53 m 62° 8 fps
8 mm 800 × 592 128 pixels 0.70 m 48° 40 fps
8 mm 1600 × 1200 128 pixels 1.41 m 48° 15 fps
8 mm 1600 × 1200 256 pixels 0.70 m 48° 8 fps
12 mm 800 × 592 128 pixels 1.06 m 33° 40 fps
12 mm 1600 × 1200 128 pixels 2.11 m 33° 15 fps
12 mm 1600 × 1200 256 pixels 1.05 m 33° 8 fps
距離と精度
Depth Error Chart
焦点距離 8.00 mm
40
Baseline distance 10.0 cm
35
最短検出距離 39.2 cm
30
距 離 デプスエラー
0.39 m 0.04 cm 25
0.5 m 0.06 cm 20
1 m 0.25 cm
15
2 m 1.01 cm
5 m 6.33 cm 10
10 m 25.6 cm 5
20 m 105 cm
50 m 714 cm 0
-5 0 5 10 15 20 25
距離(m)
デプスエラー(cm)
Page4
仕 様
SceneScan(プロッセサー部)
仕 様
電 源 11-14 V DC
SceneScan 10 W以下( カメラ含まず)
消費電力
Up to 20 W( カメラ含む)
104.5 × 105.5 × 45 mm
寸 法
104.5 × 130 × 45 mm( 取付け部含む)
SceneScan Pro
重 量 400 g
インターフェース USB 3.0 host, GigE, GPIO
ステレオマッチング
ステレオアルゴリズム SGM(Semi-Global Matching)
最大解像度 SceneScan 800 × 800 ピクセル
※Karminカメラ使用の場合、Karmin
カメラのスペックをご確認ください SceneScan Pro 1856 × 1856 ピクセル
8-bit grayscale (Mono8)
出力画像
12-bit packed grayscale (Mono12p)
SceneScan 64 to 128ピクセル
視差範囲
SceneScan Pro 96 to 256ピクセル(32 pixel increment)
SceneScan 30 fps
最大フレームレート
SceneScan Pro 95 fps
サブピクセル 4 bits (1/16 pixel)
データプロセス Erroneous disparity removal, noise removal, speckle filtering
Karmin2(ステレオカメラ)
ケーシングは、優れた安定性を持つアルマイト製。
底面には、1/4"UNCネジ穴。M3ネジ穴4つの取り付け穴があります。
仕 様
カメラモジュール daA1600-60um 彩 度 モノクロ
解像度 1600 × 1200 pixels シャッター グローバルシャッター
撮影例 1600 × 1200 pixels @15fps インターフェース USB 3.0
(SceneScan Pro使用時) 800 × 592 pixels @40fps トリガー 4ピン Binder M8コネクター
センサー e2v EV76C570 基線長 10/25cm
センサーフォーマット 1/1.8" 280g( 10cm基線長)
重量(レンズを除く)
レンズマウント C/CSマウント 430g( 25cm基線長)
KARMIN2-10
モデル 基線長
KARMIN2-10 10cm(ショートレンジ測定)
KARMIN2-25 25cm(ロングレンジ測定)
KARMIN2-25
Page5
ソフトウェア
SceneScanは以下のソフトウェアも含まれます。すべて無償で提供しています。
libvisiontransfer GenTL producer
C++ API OpenCVやPCLによって A GenICam GenTLモジュールにより、MATLAB
プログラミング可能です。 及び画像処理ソフトウェアとの接続が可能です。
NVCom ROS対応モジュール
SceneScanによって得られた視差マップを ROSのモジュールを提供しています。
表示するGUIです。
FAQ
Q.最大でどのくらいの距離まで計測できるか?
基線長を変えていただくことにより遠くを計測できます。
基線長10cmで10メートルで誤差は、28.7cm、基線長25cmで20メートル45.7cm、50メートル296cmです。
(この際のレンズ焦点距離8mm、画素数は800×592)
Q.Lidarとの比較優位性は?
Lidarとの違いは、垂直方向の検出です。自動車など使用する場合ですが、Lidarだと低い物体、
例えば人が道路に寝ていたりするのは検出しずらい傾向があります。
Q.FPGAで処理しているが、GPUベースのステレオカメラとの優位性は何か?
GPUベースのステレオカメラと比較した場合、サイズが小型且つ低電力であることです。アルゴリズムによるので
単純な比較はできないですが、精度は同等。FPGAのほうが安定したタイミングでのステレオマッチングが可能です。
またFPGA単体処理ですので、GPUと違いOSは必要ありません。
Q.なぜモノクロカメラを使用しているのか? カラーカメラは使えないか?
ステレオカメラにおいてモノクロカメラのほうが最適です。カラーカメラは、フィルターが入っているため
低い感度になってしまい画像がぼやける可能性があります。
Q.Karmin2以外のカメラも使用できるか?
USB3.0のモノクロカメラであれば基本的に対応可能です。右記のようなプレートを使用します。
SceneScanの設計として、標準的な産業用カメラをユーザーが
接続できるようにしております。これによりカスタマイズ性があがり、
お求めのシステム設計が可能となります。
カメラの型番等は購入前にメーカーと確認する必要がございます。
Q.キャリブレーションはどのように行うか?
右記のようなボードが附属されます。ボードを使って、付属ソフトで校正します。
デモ機を用意しております。
お気軽にお問い合わせください。
株式会社 ナノシード
〒182-0022 東京都調布市国領町2-5-15 コクティー3F スモールオフィス
https://nanoxeed.co.jp/ info@nanoxeed.co.jp 03-4405-3913