



ロボットの稼働率はまだまだあがる!
ロボット周辺機器のハンド・チャック・ロータリージョイント・ツールチェンジャー・クイックアジャスタ、全て揃うのはKONSEIだけ!
ロボットでお困りごとはお問い合わせ下さい!
関連メディア
このカタログについて
| ドキュメント名 | ロボット周辺機器 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 12.3Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社近藤製作所 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
ロボットの稼働率は、まだまだ上がる! !
ロータリージョイント
配管・配線のねじれトラブル解消
RJA・RJC
RJG・RJCC
RJH・RJK シリーズ
オートハンドチェンジャー
ロボットによる自動段取り替え
繰り返し精度は
業界トップクラスの
±0.003㎜
電動
正圧
負圧
KHB
KHE シリーズ
クイックアジャスタ
組立て、挿入作業のコジリを解消
QRD
QRE シリーズ
ハンド&チャック
業界No.1のバリエーションで高剛性・高精度・長寿命
●一品から特殊対応致します。 ●ロボットツールが全て揃うオンリーワン企業です。
Page2
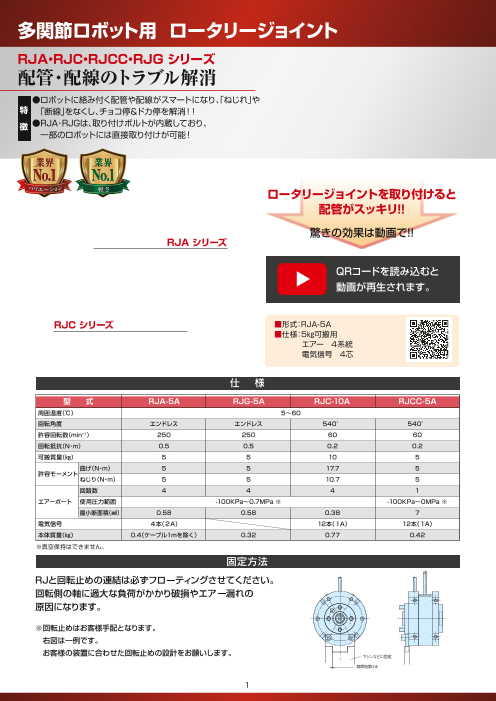
多関節ロボット用 ロータリージョイント
RJA・RJC・RJCC・RJG シリーズ
配管・配線のトラブル解消
●ロボットに絡み付く配管や配線がスマートになり「、ねじれ」や
特 「断線」をなくし、チョコ停&ドカ停を解消!!
徴●RJA・RJGは、取り付けボルトが内蔵しており、
一部のロボットには直接取り付けが可能!
業界 業界
No.1 No.1
バリエーション 軽さ ロータリージョイントを取り付けると
配管がスッキリ!!
驚きの効果は動画で!!
RJA シリーズ
QRコードを読み込むと
動画が再生されます。
RJC シリーズ ■形式:RJA-5A
■仕様:5㎏可搬用
エアー 4系統
電気信号 4芯
型 式 RJA-5A RJG-5A RJC-10A RJCC-5A
周囲温度(℃) 5~60
回転角度 エンドレス エンドレス 540° 540°
許容回転数(min-1) 250 250 60 60
回転抵抗(N・m) 0.5 0.5 0.2 0.2
可搬質量(㎏) 5 5 10 5
曲げ(N・m) 5 5 17.7 5
許容モーメント
ねじり(N・m) 5 5 10.7 5
回路数 4 4 4 1
エアーポート 使用圧力範囲 -100KPa~0.7MPa ※ -100KPa~0MPa ※
最小断面積(㎟) 0.58 0.58 0.38 7
電気信号 4本(2A) 12本(1A) 12本(1A)
本体質量(㎏) 0.4(ケーブル1mを除く) 0.32 0.77 0.42
※真空保持はできません。
マシンなどに固定
隙間を開ける
1
Page3
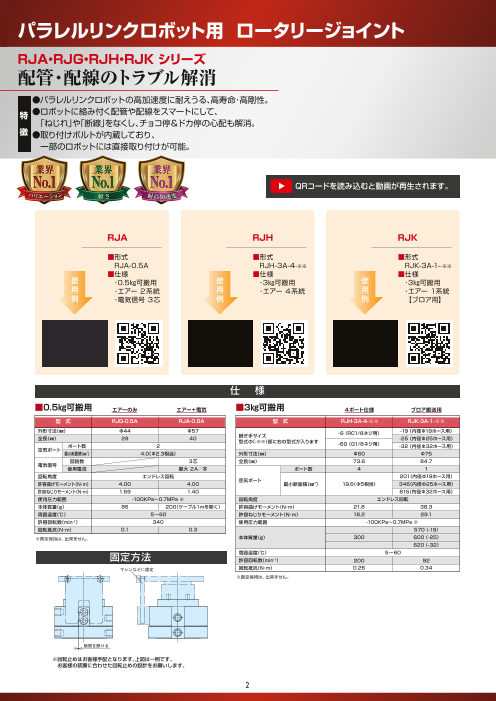
パラレルリンクロボット用 ロータリージョイント
RJA・RJG・RJH・RJK シリーズ
配管・配線のトラブル解消
●パラレルリンクロボットの高加速度に耐えうる、高寿命・高剛性。
特●ロボットに絡み付く配管や配線をスマートにして、
「ねじれ」や「断線」をなくし、チョコ停&ドカ停の心配も解消。
徴●取り付けボルトが内蔵しており、
一部のロボットには直接取り付けが可能。
業界 業界 業界
No.1 No.1 No.1 QRコードを読み込むと動画が再生されます。
バリエーション 軽さ 耐高加速度
RJA RJH RJK
■形式 ■形式 ■形式
RJA-0.5A RJH-3A-4-※※ RJK-3A-1--※※
■仕様 ■仕様 ■仕様
使 ・0.5㎏可搬用 使 ・3㎏可搬用 使 ・3㎏可搬用
用 ・エアー 2系統 用 ・エアー 4系統 用 ・エアー 1系統
例 ・電気信号 3芯 例 例 【 ブロア用】
■0.5㎏可搬用 エアーのみ エアー+電気 ■3㎏可搬用 4ポート仕様 ブロア搬送用
型 式 RJG-0.5A RJA-0.5A 型 式 RJH-3A-4-※※ RJK-3A-1-※※
外形寸法(㎜) Φ44 Φ57 -6( RC1/8ネジ用) -19( 内径Φ19ホース用)
全長(㎜) 29 40 継ぎ手サイズ型式の(-※※)部に右の型式が入ります -25( 内径Φ25ホース用)
ポート数 2 -6G( G1/8ネジ用) -32( 内径Φ32ホース用)
空気ポート
最小断面積(㎜2) 4.0(Φ2.3相当) 外形寸法(㎜) Φ60 Φ75
回路数 3芯 全長(㎜) 73.6 84.7
電気信号
使用電流 最大 2A/本 ポート数 4 1
回転角度 エンドレス回転 201(内径Φ19ホース用)
空気ポート
許容曲げモーメント(N・m) 4.00 4.00 最小断面積(㎜2) 19.6(Φ5相当) 346(内径Φ25ホース用)
許容ねじりモーメント(N・m) 1.59 1.40 615(内径Φ32ホース用)
使用圧力範囲 -100KPa~0.7MPa ※ 回転角度 エンドレス回転
本体質量(g) 86 200(ケーブル1mを除く) 許容曲げモーメント(N・m) 21.8 38.3
周囲温度(℃) 5~60 許容ねじりモーメント(N・m) 18.2 29.1
許容回転数(min-1) 340 使用圧力範囲 -100KPa~0.7MPa ※
回転抵抗(N・m) 0.1 0.3 570( -19)
※真空保持は、出来ません。 本体質量(g) 300 600( -25)
620( -32)
周囲温度(℃) 5~60
許容回転数(min-1) 200 92
回転抵抗(N・m) 0.26 0.34
※真空保持は、出来ません。
※回転止めはお客様手配となります。上図は一例です。
お客様の装置に合わせた回転止めの設計をお願いします。
2
Page4
オートハンドチェンジャー
KHB シリーズ
多品種ワークのFA化を実現
●繰り返し精度±0.003㎜でガタツキがほぼゼロ!
特●軽量でコンパクトボディ!
徴●豊富なサイズバリエーション!
更に豊富なオプション選択が可能!
業界 業界 業界
No.1 No.1 No.1
バリエーション 繰り返し精度 軽さ ハンドなどのツール交換を
ロボット自ら行います!
ロボット側(R) QRコードを読み込むと
動画が再生されます。
ハンド側(H)
■ハンドチェンジャー デモ動画
型 式 KHB-1 KHB-3 KHB-7 KHB-12 KHB-25
可搬質量(㎏) 1 3 7 12 25
駆動源 エアー 0.3~0.7MPa
ツールポート圧力 エアー -100KPa~0.7MPa ※
周囲温度(℃) 5~60
繰り返し精度(㎜) ±0.003
連結軸力(N) 500 650 1100 1750 3200
連結時モーメント(N・m) 4.2 5.8 32.9 58.8 100
連結時トルク(N・m) 13.8 16 35.9 90 180
ロボット側 (R) 0.04 0.07 0.17 0.22 0.48
本体質量(㎏)
ツール側 ( H) 0.02 0.03 0.08 0.08 0.17
空気インターフェース 2 4 6 6 6
密着確認用ポート なし
型 式 KHB-45 KHB-60 KHB-120 KHB-180 KHB-230 KHB-300
可搬質量(㎏) 45 60 120 180 230 300
駆動源 エアー 0.3~0.7MPa
ツールポート圧力 エアー -100KPa~0.7MPa ※
周囲温度(℃) 5~60
繰り返し精度(㎜) ±0.003
連結軸力(N) 5230 8310 13410 20950 27650 36950
連結時モーメント(N・m) 350 640 670 880 880 2800
連結時トルク(N・m) 320 380 880 1900 1900 3700
ロボット側 (R) 1 1.51 3.24 5.53 6.11 13.33
本体質量(㎏)
ツール側 ( H) 0.44 0.73 1.3 2.12 2.39 5.91
空気インターフェース 4 8 8 12 10 14
密着確認用ポート 2
※真空保持はできません。
■豊富なオプションの一例(チェック弁・本体オプション・電気モジュール・増設ボードなど)
3
Page5
手動ツールチェンジャー
KHE シリーズ
手動での段取り替えもスマートに!
●繰り返し精度±0.005㎜と高精度!
特●治具の着脱とエアー配管&電極コネクタの脱着がワンタッチ!
●シンプル構造の為、非常に安価!
徴●専用工具不要で、お手元の工具でも代用が可能!
●安全ロック機構が標準装備!
業界 業界 業界
No.1 No.1 No.1 手動でのツール交換も
バリエーション 繰り返し精度 軽さ ワンタッチで素早く時短!
ロボット側(R) QRコードを読み込むと
動画が再生されます。
ハンド側(H) ■手動ツールチェンジャー
商品紹介動画
仕 様 電極の種類
型 式 KHE-25 KHE-60
可搬重量(㎏) 25 60
外観寸法(㎜) 86×86 130×130
連結時全長(㎜) 43 58
駆動源 手動 D1
周囲温度(℃) 5~60
繰り返し精度(㎜) ±0.005
連結軸力(N) 3400 6200
連結時モーメント(N・m) 140 400
連結時トルク(N・m) 200 350 D2
連結可能隙間 1mm以下
ロボット側(㎏) 0.55 1.60
本体質量(㎏)
ツール側(㎏) 0.37 0.95
回路数 4 6
空気インターフェース 最小断面積(㎟) 12.5
使用圧力範囲 -100KPa ~ 0.7MPa ※
D1:電極付(15ピン)15芯
電気インターフェース(オプション) D2:電極+信号ケーブル(1.0m) D3
D3:電極+Dサブコネクタ ※電流各2Aまで
※真空保持はできません。
使用方法
① ② ③ ■取付方法
⑴本体のハンドルを図①の位置にして、ツールアダプタを本体に引き寄せてください。
このとき、ツールアダプタの向きに注意して下さい。
⑵ハンドルを図②で示す方向に90度(止まるまで)旋回します。
ハンドルを旋回することでツールアダプタが引き上げられ本体とツールアダプタが
密着します。
ハンドル このとき、本体とツールアダプタの間に異物が混入しないようにしてください。
(お客様手配) 安全ピン 着脱不良やエアー漏れの原因になります。
⑶安全ピンを差込みハンドルをロックします。
■取外し方法
取付方法の①~③の手順を逆に行って下さい。
90°
4
Page6
クイックアジャスタ
QRD・QRE シリーズ
組み立て作業をスムーズに!
●QREシリーズは繰り返し精度±0.02㎜の高精度で
特 組立・挿入工程に最適!
徴●軽量でコンパクトボディ!
●豊富なサイズバリエーション!
業界 業界 業界
No.1 No.1 No.1
バリエーション 繰り返し精度 軽さ
QRD 機能説明
■QRD
●エアーを入れると その場を保持
●残圧を開放すると ツールがフローティング状態に
QRE ■QRE
●エアーを入れると センターの原点に戻ってロック
●残圧を開放すると ツールがフローティング状態に
QRコードを読み込むと
動画が再生されます。
■クイックアジャスタ
デモ動画 機能説明
仕 様
型 式 QRD-6A QRD-20A QRE-1A QRE-3A QRE-7A QRE-12A QRE-25A
可搬質量(㎏) 6 20 1 3 7 12 25
駆動源 エアー 0.3~0.7MPa
潤滑 無給油またはタービン油 1種(ISOVG32)
周囲温度(℃) 5~60
X-Y(㎜) ±2 ±3 ±0.5 ±1.5 ±2 ±3 ±3
移動量 ねじれ方向
α(° ) ±2 ±3 ±2 ±4 ±4 ±4 ±4 (α)
X-Y(㎜) (180N) (400N) ±0.02
繰り返し精度(保持力)
※1 α(ねじれ()° ) (2.88N・m) (11. ON・m) ±0.1
圧縮方法(N) 888 1998 1610 4310 7660 11030 22060
引張方向(N) 888 1998 1030 1640 3180 5600 8670
許容荷重
曲げモーメント(N・m) 18 76.9 8.3 22.4 100.7 219.1 497.1
XーY方向
許容トルク(N・m) 7 77 11.3 42.6 88.1 194.4 436.3
本体質量(㎏) 0.9 4 0.04 0.16 0.40 0.79 1.5
※1 QRDに関しては保持力を表しています。
5
Page7
ハンド & チャック
専門メーカーならではの高品質をご提供!
●業界No.1のバリエーションを誇り、小さな電子部品から
大きな重量物まで対応可能!
●通常環境はもちろん、油や粉塵の悪環境下から
特 クリーンルームまで充実な品揃え!
徴●安価なタイプから、高精度タイプまで幅広い
ラインナップ!
●半導体のウエハ専用ハンドなど、各専門分野に対応! 業界 業界 業界
●特殊仕様品を1個から対応致します! No.1 No.1 No.1
バリエーション 高剛性 高精度
■商品の一例
HK HHシリーズシリーズ
HCシリーズ
HAシリーズ
HMFシリーズ
HMAシリーズ BHEシリーズ LHAシリーズ BHAシリーズ HLCシリーズ HLBシリーズ HLAシリーズ HFシリーズ
CKJシリーズ
HJDシリーズ
HJシリーズ CKLシリーズ
CKGシリーズ
HDシリーズ
HMD HMB CKSシリーズ CKAシリーズシリーズ シリーズ CKFシリーズ
■ウエハハンド ■液晶ガラス搬送ハンド ■クリーンルーム対応機器
6
Page8
ロボット周辺機器
ノウハウの蓄積と進化を追求してきた、 自信のメカトロ機器をご活用ください。
常にFA化の先端を考えて、お客様をトータルサポートする の供給・搬送システム。
ラインの省人化をめざす の加工・供給・搬送システム
●ハンド&チャック ●空圧・油圧機器 ●各種搬送移載装置 ●オートローダー装置
●ロボット装置 ●多軸自動盤 ●自動計測装置 ●各種専用機
D-1912-50A