




【短納期対応!】油圧比例弁のデジタル設定アンプ「VAC」。デジタル設定のため調整作業が簡単です。油圧機器のメーカー問わず、様々な比例弁に対応可能。 世界最速級のサーボ弁「DAシリーズ」カタログ付き。
製品カタログ
【油圧制御】短納期対応のデジタル設定アンプ「VACシリーズ」。世界最速級の直動型高速サーボ弁「DAシリーズ」。単純適応制御を実用化した「I-SACシリーズ」のご紹介。サーボ調整のサポートも致します。
◆電磁比例弁用デジタルアンプ「VACシリーズ」
サンテストは比例弁を提供するのではなく、 比例弁を駆動するアンプを提供します。比例弁は既設を使用可能。
デジタル設定やデジタル通信で比例弁を駆動することが可能になります。
◆サーボ弁「DA03シリーズ」
サンテストは世界最速級の直動型サーボ弁を提供します。
自社開発、国内生産。短納期も実現可能です。
◆サーボコントローラ「I-SACシリーズ」
PID制御を超えるロバスト制御を実現!単純適応制御理論を実用化。
サーボ弁やサーボポンプを制御します。
◆詳細は、カタログをダウンロードしてご覧ください。
このカタログについて
| ドキュメント名 | 【短納期対応!】油圧比例弁のデジタル設定アンプ「VAC」。デジタル設定のため調整作業が簡単です。油圧機器のメーカー問わず、様々な比例弁に対応可能。 世界最速級のサーボ弁「DAシリーズ」カタログ付き。 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 5.2Mb |
| 登録カテゴリ | |
| 取り扱い企業 | サンテスト株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ



このカタログの内容
Page1
油圧制御
油圧制御
油圧アクチュエータを電気的に制御する方法として、
電磁比例弁を使用する方法と、
サーボ弁やサーボポンプ(油圧ポンプ+ サーボモータ)を使用する方法があります。
(最終の停止精度や圧力精度が異なってきます。)
(1) 電磁比例弁
サンテストは比例弁を提供するのではなく、 比例弁を駆動するアンプを提供します。
比例弁は既設を使用可能。 デジタル設定やデジタル通信で比例弁を駆動することが
可能になります。
⇒デジタル設定アンプ 「VAC シリーズ」
(2) サーボ弁 / サーボポンプ
サンテストはサーボ弁を提供します。
⇒サーボ弁 「DA03 シリーズ」
またサーボ弁やサーボポンプを制御する制御コントローラを提供します。
⇒サーボ(制御)コントローラ 「I-SAC シリーズ」
本 社 〒554-8691 大阪市此花区島屋 4 丁目 2 番 51 号
TEL : 06(6465)5561 FAX : 06(6465)5921
info@santest.co.jp
Page2
比例弁用デジタルアンプ
2018年5⽉作成
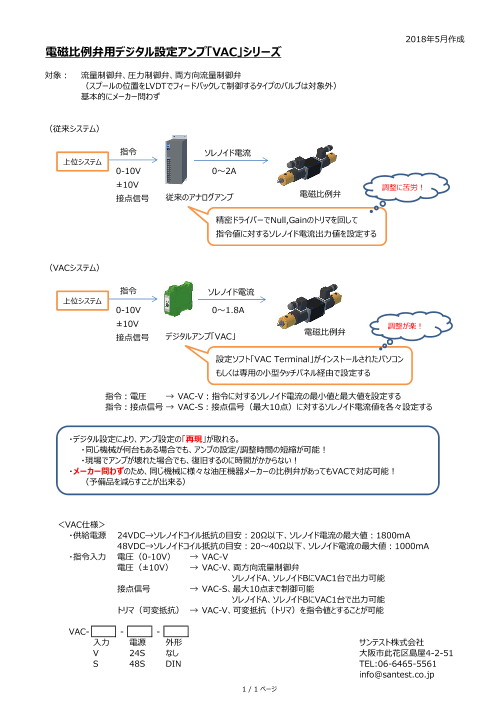
電磁⽐例弁⽤デジタル設定アンプ「VAC」シリーズ
対象: 流量制御弁、圧⼒制御弁、両⽅向流量制御弁
(スプールの位置をLVDTでフィードバックして制御するタイプのバルブは対象外)
基本的にメーカー問わず
(従来システム)
指令 ソレノイド電流
上位システム
0-10V 0〜2A
±10V 調整に苦労!
接点信号 従来のアナログアンプ 電磁⽐例弁
精密ドライバーでNull,Gainのトリマを回して
指令値に対するソレノイド電流出⼒値を設定する
(VACシステム)
指令 ソレノイド電流
上位システム
0-10V 0〜1.8A
±10V
電磁⽐例弁 調整が楽!接点信号 デジタルアンプ「VAC」
設定ソフト「VAC Terminal」がインストールされたパソコン
もしくは専⽤の⼩型タッチパネル経由で設定する
指令:電圧 → VAC-V:指令に対するソレノイド電流の最⼩値と最⼤値を設定する
指令:接点信号 → VAC-S:接点信号(最⼤10点)に対するソレノイド電流値を各々設定する
・デジタル設定により、アンプ設定の「再現」が取れる。
・同じ機械が何台もある場合でも、アンプの設定/調整時間の短縮が可能!
・現場でアンプが壊れた場合でも、復旧するのに時間がかからない!
・メーカー問わずのため、同じ機械に様々な油圧機器メーカーの⽐例弁があってもVACで対応可能!
(予備品を減らすことが出来る)
<VAC仕様>
・供給電源 24VDC→ソレノイドコイル抵抗の⽬安:20Ω以下、ソレノイド電流の最⼤値:1800mA
48VDC→ソレノイドコイル抵抗の⽬安:20〜40Ω以下、ソレノイド電流の最⼤値:1000mA
・指令⼊⼒ 電圧(0-10V) → VAC-V
電圧(±10V) → VAC-V、両⽅向流量制御弁
ソレノイドA、ソレノイドBにVAC1台で出⼒可能
接点信号 → VAC-S、最⼤10点まで制御可能
ソレノイドA、ソレノイドBにVAC1台で出⼒可能
トリマ(可変抵抗) → VAC-V、可変抵抗(トリマ)を指令値とすることが可能
VAC- - -
⼊⼒ 電源 外形 サンテスト株式会社
V 24S なし ⼤阪市此花区島屋4-2-51
S 48S DIN TEL:06-6465-5561
info@santest.co.jp
1 / 1 ページ
Page3
VAC_catalog、VAC-4-omote
Ver.4
電磁比例弁用デジタルアンプ
VAC シリーズ
方向流量制御弁、流量制御弁、圧力制御弁など
電磁比例弁のNULL、GAIN、出力値などの調整に苦労していませんか?
・精密ドライバーでの調整に苦労!
・出力電流の最大値、最小値の設定にはテスターが必要!
・NULLを調整すると最大値が変化してしまう!
・アンプ交換時に、トリマの再調整が面倒!
・同じ仕様のアンプが複数台ある時も、個別に調整が必要!
VACがこれらの問題を解決します!!
VACシリーズは、パソコンや専用タッチパネルを利用して、
NULL、GAIN、出力値など各種設定をデジタル設定できます。
電圧入力(0~10V)
RS-232C
接点入力
専用タッチパネル
パラメータ
設定
USBに変換
ソレノイド電流
(0~1800mA)
電磁比例弁 VACシリーズ ノートPC
デジタル設定
現システムに対し、 ・複数のアンプを簡単に同じ設定が可能!
アンプだけを交換するだけでよく、 ・パラメーターをパソコンに保存することが
既存のバルブをそのまま使える。 でき、交換時のアンプの設定も簡単!・モニタ機能を搭載!
Page4
VAC-4-ura
特長 仕様
①最小値、最大値をデジタル設定(VAC-V) 型式 VAC-V VAC-S
従来のようにテスタで出力電流値を確認しながら、調整トリマを 入力方式 電圧入力 接点入力
回す必要はありません。 入力信号 -10V~+10V 接点DC24V(±10%)
(入力インピーダンス16kΩ) Max.10点(各点8mA)
②入力接点毎に出力電流値、立ち上がり/立ち下がり 出力 0~1800mA(供給24V)/0~1000mA(供給48V)
時間をデジタル設定(VAC-S) 電源電圧(※) DC24V(±10%) または DC48V(±10%)
接点ON/OFF時の出力電流、立ち上がり/立ち下がり時間を 消費電流 2.2A(供給24V)/1.2A(供給48V)
設定。出力電流は1mA刻みで設定可能。 使用温度範囲 0℃~50℃
保存温度範囲 -25℃~75℃
③パラメータの簡単設定
RS-232C通信でパソコンもしくは専用タッチパネルで設定。
パソコンで設定する場合は、パラメータの保存、コピーも容易。 【型式】
④各種モニタ機能 VAC-□-□-□
I/Oの入出力状態、アナログ入力電圧値、コイル出力電流値 ① ② ③
をパソコンもしくは専用タッチパネルでモニタ可能。
⑤ツーピースコネクタを採用 ①入力タイプ ②供給電源
結線したままで簡単にコネクタ脱着できる。I/Oチェックの際に V:電圧入力 24S:DC24V
ソレノイド電流を流したくない場合に有効です。 S:接点入力 48S:DC48V
⑥非常停止 ※電源電圧の目安
DC24V:コイル抵抗20Ω以下
非常停止入力をご用意しています。 ③コントローラ形状 DC48V:コイル抵抗20~35Ω
空欄:板金タイプ (弊社までお問い合わせ下さい)
⑦ノイズフィルタ DIN:DINレールタイプ
接点入力にデジタルフィルタを実装。ノイズ等の誤動作を防ぐ。
⑧LEDとREADY信号
本体前面に電源LED、警報LEDを搭載。異常状態を現場で
判定することが可能。
⑨DC24電源
電源電圧の変動に影響を受けません。
仕様
■板金タイプ ■DINレールタイプ
29.6 2-Φ4.5 110
4-Φ4.5
15 15 80 15
22.5 114
MODEL VAC
CN1
COM
POW ALM
CN2
I/O
CN3
COIL
CN4
POW
STC SANTEST
MADE IN JAPAN
DIN35mmレール取付フック
本カタログの仕様は、改良のため予告なく変更することがあります。
It makes Technological Sense
本 社 〒554-8691 大阪市此花区島屋4丁目2番51号
製造発売元 TEL.06-6465-5561 FAX.06-6465-5921
東京営業所 〒105-0012 東京都港区芝大門1-16-4 第二高山ビル2F
TEL.03-3432-1417 FAX.03-3432-1337
http://www.santest.co.jp
2017082000G
200
5 190 5
5 190 5
99
Page5
油空圧サーボコントローラ「I-SAC」シリーズ
2018年6⽉作成
油空圧サーボコントローラ「I-SAC(アイザック)シリーズ」
現代制御理論の1つである単純適応制御(SAC:Simplified Adaptive Control)を採⽤。
制御対象のパラメータの変動や経年変化による影響を⾃動的に吸収するロバスト制御を実現。
従来のPID制御(古典制御)を超える制御性能を発揮。
対象: サーボ弁(直動型、ノズルフラッパー等)、サーボポンプ(サーボモーター+油圧ポンプ)、空圧サーボ弁、
⾼速応答⽐例弁等をコントロールして、位置制御や圧⼒(荷重)制御を⾏う。
サーボコントローラ
(I-SAC)
指令 サーボ出⼒ サーボ弁
上位システム
サーボモーター+油圧ポンプ
サーボアンプ
サーボドライバー
フィードバック
(位置、圧⼒、荷重)
<I-SACの特⻑>
①アクセルとブレーキのパラメータを持つ
通常のPIDでは、アクセルの役⽬であるP(⽐例)ゲインを調整します。
Pゲインを⾼くすると、指令に対する追従性は向上するが、オーバーシュートする(図1)。
オーバーシュートさせたく場合は、Pゲインを低くする。追従性は低下し、定常偏差も⼤きくなる(図2)。
I-SACは、(イメージとして)都合の良いブレーキを持つ。偏差の⼤きい時はブレーキが効かず、
偏差が⼩さくなるにつれてブレーキが効く(I-SACの内部でゲインを⾃動的に⼩さくする)。
そのためにオーバーシュートせずに追従性を向上させることができる(図3)。
PID(Pゲイン⼤) PID(Pゲイン⼩) I-SAC
定常偏差
図1 図2 図3
②状態の変化に対する耐久性に優れている
通常のPIDでは、油温が変化したり、負荷が変化すると、サーボゲインのパラメータを再調整する必要があり、
最適なサーボパラメータを探す作業に⾮常に苦労する。
I-SACは、内部に⾃動適応機構を持っているため、油温や負荷などの状態が変化しても、
パラメータの再調整をしなくても、当初の制御性能が維持できる。
<制御ブロック図>
KE:⽐例ゲイン
IG:安定度
Gp1, Gp3:適応ゲイン
・PFCによるシステム全体の安定化
(⽐例ゲインを⼤きくしても発振しない)
・適応ゲインによって、ハイゲイン化が可能
(追従特性の向上)
1 / 4 ページ
Page6
<I-SACシリーズのラインナップ>
①IRDS-SC : スタンドアローン型。IRDM-NB(電源/設定)と組合せて使⽤。
1軸仕様。指令は、上位システムからアナログもしくはパルスで与える。
②DS-Q : 三菱電機製シーケンサQシリーズにビルトインできるサーボコントローラユニット。
位置/圧⼒(荷重)制御の切替制御が可能。
③IRDS-SV : 産業⽤ネットワーク(CC-Link, CC-Link IE Field, EtherNet/IP, PROFIBUS, EtherCAT)
対応のサーボコントローラ。DS-Q同様に位置/圧⼒(荷重)制御の切替制御が可能。
同調制御(マスタ-スレーブ同調、平衡同調)が可能。
④I-SAC C1 : スタンドアローン型。既存システムのリピートオーダーにのみ対応。
新規は、IRDS-SC(IRDS-SV、DS-Q)で対応。
⑤I-SAC MX2 : ⽣産中⽌。既存システムのリピートの場合は、弊社までご相談下さい。
IRDS-SC DS-Q IRDS-SV I-SAC C1 I-SAC MX2
(⽣産中⽌)
サーボ軸数 1軸 1軸(内部に2軸) 1軸(内部に2軸) 1軸 2軸
サーボ演算 5kHz 5kHz 5kHz 3kHz 5kHz
サイクル 20kHz(オプション)(スキャンタイムに
依存しない)
サーボ出⼒ ±10V、±50mA ±10V、±50mA ±10V、±50mA ±10V、±50mA ±10V、±50mA
(16bit D/A) (16bit D/A) (16bit D/A) (16bit D/A) (16bit D/A)
指令 ・±10V、±20mA シーケンサCPUから 産業⽤ネットワーク ・±10V、±20mA ・±10V、±20mA
(16bit A/D) バッファメモリへ 経由でバッファメモリ (12bit A/D) (16bit A/D)
・A/B相パルス 書き込む へ書き込む ・A/B相パルス ・A/B相パルス
・産業⽤ネットワーク
経由でバッファメモリ
へ書き込む
フィードバック 1ch ・センサ直結ポート ・センサ直結ポート 1ch 1ch/軸
・±10V、±20mA (GY、A/B相パルス) (GY、A/B相パルス) ・±10V、±20mA ・±10V、±20mA
(16bit A/D) ・バッファメモリ ・バッファメモリ (12bit A/D) (16bit A/D)
・A/B相パルス (他軸のセンサ) (他軸のセンサ) ・A/B相パルス ・A/B相パルス
・アナログ⼊⼒2ch ・アナログ⼊⼒2ch
±10V、±20mA ±10V、±20mA
(16bit A/D) (16bit A/D)
パラメータ設定 PC PC PC PC PC
(IRD Manager) (I-SAC TerminalQ) (IRD Manager) (I-SAC Terminal) (I-SAC Terminal)
(または 上位システム) または PLC または PLC
<サーボコントローラの選定イメージ>
・単純な1軸制御 → IRDS-SC
・アナログ指令で荷重制御
・ラフな位置制御
・⾼精度な位置制御(0.1mm以下) → DS-Q :上位PLCが三菱電機MELSEC-Qの場合
・位置/圧⼒(荷重)の切替制御 IRDS-SV :上位PLCが三菱電機MELSEC-Q以外の場合
(産業⽤ネットワーク経由)
・試験機など加振制御 → IRDS-SCH(サーボ演算サイクル:20kHz)
2 / 4 ページ
Page7
<システム構成案>
①1軸制御(位置制御、荷重制御、圧⼒制御):アナログ指令
上位システム ※マスタ(IRDM-NB)1台に対して、
指令 サーボコントローラ(IRDS-SC)が最⼤9まで接続可能PLC / PC
(電圧 or 電流) 指令
① ② ①IRDM-NB:電源/設定モジュール
②IRDS-SC:サーボコントローラ ① ② ② ②
パラメータ設定
フィードバック(電圧 or 電流)
サーボ出⼒ ・位置:リニアセンサ サーボ出⼒ フィードバック
・圧⼒:圧⼒センサ
・荷重:ロードセル
②⾼精度な位置制御(⽬標停⽌精度:0.1mm以下〜数μm):ディジタルフィードバックループ
上位システム PLC:三菱電機MELSEC-Qの場合のみ
PLC
⑤
③IRDM-**:通信モジュール
CC-Link ④IRDS-SV:サーボコントローラ
③ ④ サーボ出⼒
EtherNet/IP
PROFIBUS 位置フィードバックサーボ出⼒ 位置フィードバック
EtherCAT (GYcRSやGYSE-Rなど)RS422
CC-Link IE Field 三菱電機MELSEC-Qビルトイン型サーボコントローラ
⑤DS-Q**-G*
・位置指令は、
IRDS-SVやDS-Qの指令値バッファメモリに
バイナリ値で⼊⼒する
・サーボコントローラ内部のモーション機能も使⽤可能
リニアセンサ(GYcRSやGYSE-Rなど)
センサ分解能は客先設定。10μmでも1μmでも任意設定
③荷重制御(圧⼒センサを2個使⽤)
上位システム PLC:三菱電機MELSEC-Qの場合のみ
PLC ⑤
③IRDM-**:通信モジュール
④IRDS-SV:サーボコントローラ
サーボ出⼒ 圧⼒センサ:P1CC-Link ③ ④ 圧⼒センサ:P2
EtherNet/IP
PROFIBUS サーボ出⼒ 圧⼒センサ:P1
EtherCAT 三菱電機MELSEC-Qビルトイン型サーボコントローラ圧⼒センサ:P2
CC-Link IE Field ⑤DS-Q**-G*
P2 P1 ・IRDS-SVやDS-Qの設定パラメータの中に、CY断⾯積を⼊⼒する項⽬あり
・そのため⼊⼒は圧⼒センサだが、サーボ演算のFBとしては荷重値で計算
・荷重指令は、指令値バッファメモリにバイナリ値で⼊⼒する
3 / 4 ページ
Page8
④軸切替制御(位置/圧⼒制御、位置/荷重制御)
<①の構成で2軸切替> <②と③の構成で1台で切替>
PLC/PC
上位システム PLC:三菱電機MELSEC-Qの場合のみ
I/O D/A
PLC ⑤
サーボON/OFF 指令
軸切替 アナログ 圧⼒センサ:P1CC-Link ③ ④ 圧⼒センサ:P2
EtherNet/IP サーボ出⼒
① ② ② リニアセンサPROFIBUS サーボ出⼒ 圧⼒センサ:P1 A/B相パルス
EtherCAT
圧⼒/荷重FB 圧⼒センサ:P2 GYcRSサーボ出⼒ CC-Link IE Field リニアセンサ GYSE-R
位置FB A/B相パルス DS-Q x 1台
GYcRS, GYSE-R
IRDS-SC x 2台 IRDS-SV x 1台
⑤同調制御
・マスタのCYに対して、他のCYを追従させる(マスタ-スレーブ同調)
・2本以上のCYを、お互いに監視しながら制御する(平衡同調)
上位システム 同期制御 同調制御 平衡同調
PLC
CC-Link ③ ④ ④ ④
EtherNet/IP
PROFIBUS
EtherCAT
CC-Link IE Field サーボ出⼒ フィードバック
・同期制御
③IRDM-**:通信モジュール モーションスタートタイミングを合わせる。軽負荷や、同調精度にこだわる
④IRDS-SV:サーボコントローラ 必要がない場合
・同調制御
マスタ制御軸のフィードバック値をスレーブ軸の指令としてスレーブを
マスタに追従させる。重負荷、同調精度が必要な場合
⑥加振制御
・「IRDS-WG」で関数波形を⽣成し、その波形を指令値とする(正弦波、余弦波、三⾓波、矩形波、のこぎり波など)
・また任意波形としてパソコンで⽣成した波形(csvファイル)、PLC等の上位機器(産業⽤ネットワーク経由)から設定した
任意の波形に波形開始/停⽌時の振幅の勾配をつけた波形を⽣成し、その波形を指令値とする
上位システム ③IRDM-**:通信モジュール
PLC/PC ②④IRDS-SV/SC:サーボコントローラ
⑤IRDS-WG:関数波形⽣成
②
CC-Link ③ ⑤④ ・波形の開始/停⽌は産業⽤ネットワーク経由で指⽰
EtherNet/IP ・必ず上位システムとは、産業⽤ネットワークで接続
PROFIBUS サーボ出⼒ フィードバック
EtherCAT サンテスト株式会社
CC-Link IE Field ⼤阪市此花区島屋4-2-51
Ethernet(Modbus) ※詳細な設定波形は「IRDS-WG」をご確認下さい。 TEL:06-6465-5561
info@santest.co.jp
4 / 4 ページ