


産業用ロボットに必要不可欠 真空パッド用のブラケットを標準化
アルミや板金仕様で軽量化を実現しました。直接取り付けられるため手間もかからず、パッドの位置合わせに便利なメモリ付きもラインアップ。真空パッド取付ネジサイズM5に対応しています。
【ラインアップ】
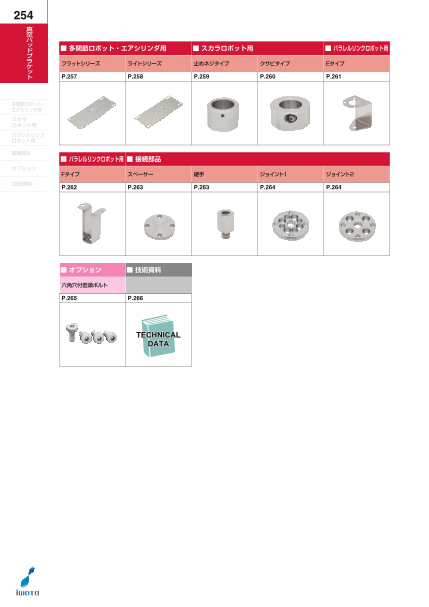
■多関節ロボット・エアシリンダ用
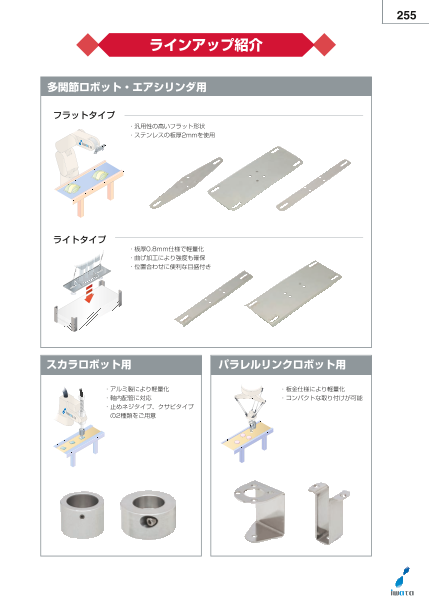
<フラットタイプ>
・汎用性の高いフラット形状
・ステンレスの板厚2mmを使用
<ライトタイプ>
・板厚0.8mm仕様で軽量化
・曲げ加工により強度も確保
・位置合わせに便利な目盛付き
■スカラロボット用
・アルミ製により軽量化
・軸内配管に対応
・止めネジタイプ、クサビタイプの2種類をご用意
■パラレルリンクロボット用
・板金仕様により軽量化
・コンパクトな取り付けが可能
■接続部品
■オプション
※詳しくはPDF資料をご覧いただくか、お気軽にお問い合わせ下さい。
このカタログについて
| ドキュメント名 | 【分割版カタログ】岩田製作所 機械要素部品『真空パッドブラケット』 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 2.8Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社岩田製作所 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
253
セミオーダー
真空パッドブラケット
VACUUM PAD BRACKET
産業用ロボットに必要不可欠
真空パッド用のブラケットを標準化
アルミや板金仕様で軽量化を実現しました。直
接取り付けられるため手間もかからず、パッド
の位置合わせに便利なメモリ付きもラインアッ
プ。真空パッド取付ネジサイズM5に対応して
います。
Page2
254
真
空
パ
ッ
ド ■ 多関節ロボット・エアシリンダ用 ■ スカラロボット用 ■ パラレルリンクロボット用
ブ
ラ
ケ フラットシリーズ ライトシリーズ 止めネジタイプ クサビタイプ Eタイプ
ッ
ト P.257 P.258 P.259 P.260 P.261
多関節ロボット・
エアシリンダ用
スカラ
ロボット用
パラレルリンク
ロボット用
接続部品
■ パラレルリンクロボット用 ■ 接続部品
オプション
Fタイプ スペーサー 継手 ジョイント1 ジョイント2
技術資料
P.262 P.263 P.263 P.264 P.264
■ オプション ■ 技術資料
六角穴付低頭ボルト
P.265 P.266
TECHNICAL
DATA
Page3
255
ラインアップ紹介
多関節ロボット・エアシリンダ用
フラットタイプ
・汎用性の高いフラット形状
・ステンレスの板厚2mmを使用
ライトタイプ
・板厚0.8mm仕様で軽量化
・曲げ加工により強度も確保
・位置合わせに便利な目盛付き
スカラロボット用 パラレルリンクロボット用
・アルミ製により軽量化 ・板金仕様により軽量化
・軸内配管に対応 ・コンパクトな取り付けが可能
・止めネジタイプ、クサビタイプ
の2種類をご用意
Page4
256
アプリケーション紹介
多関節ロボット用 エアシリンダ用
スカラロボット用 パラレルリンクロボット用
Page5
特注品 P.686 お問い合わせ P.740 発送情報 P.740 257
真
多関節ロボット・エアシリンダ用 空
当日出荷 CAD CAD パ
フラットシリーズ 受付16時 2D 3 D ッ
ド
ブ
ラ
真空パッド取付ネジサイズ M5に対応。 ケ
ッ
汎用性の高いフラット形状。 ト
耐食性に優れたステンレスSUS304製。
多関節ロボット・
エアシリンダ用
スカラ
ロボット用
パラレルリンク
ロボット用
接続部品
オプション
技術資料
単位:mm
パッド取付穴 ロボット、シリンダ取付穴
パッド取付穴 ロボット取付穴
パッド取付穴 シリンダ取付穴
20
t 2 20 P
P A 20
A P
A
2穴タイプ(多関節ロボット用) 2穴タイプ(エアシリンダ用) 4穴タイプ
板厚:t 2.0
材質
ステンレス SUS304
用途 ロボット・シリンダ取付穴 タイプ P Q A B 重量(g) 品番 価格(円)
100 - 140 40 54 RPAA100-M5S 1,050
45°
4-φ5.5 2穴 150 - 190 40 76 RPAA150-M5S 1,280
.D. 31
.5
P.C 200 - 240 40 98 RPAA200-M5S 1,620
多関節ロボット用
100 40 140 60 115 RPAB100-M5S 1,390
4穴 150 50 190 70 187 RPAB150-M5S 1,850
200 70 240 90 310 RPAB200-M5S 2,660
100 - 133 23 41 RPBA100-M5S 920
4-φ4.5 2穴 150 - 183 23 58 RPBA150-M5S 1,160
エアシリンダ用 200 - 233 23 74 RPBA200-M5S 1,390
⎛ ガイド付シリンダ ⎞
⎝ ⎠ 100 40 140 60 115
チューブ内径φ12用 RPBB100-M5S 1,390
48 4穴 150 50 190 70 188 RPBB150-M5S 1,850
200 70 240 90 310 RPBB200-M5S 2,660
※上記寸法にて取付可否をご確認の上、お選びください。
接続部品 P.263 オプション P.265
14
5.1
B
▼
5.1
B
▼
▼
5.1
Q
B
Page6
2■58 製品情報・各種ご請求・お問い合わせ www.iwata-fa.jp NEW お役立ち情報 monodukuri.iwata-fa.jp
真
空
パ 多関節ロボット・エアシリンダ用 当日出荷 CAD CAD
ッ
ド ライトシリーズ 受付16時 2D 3 D
ブ
ラ
ケ
ッ 真空パッド取付ネジサイズ M5に対応。
ト 板厚が薄く軽量でありながら、曲げ加工により強度もあるシリーズです。
位置合わせに便利な目盛付き。
耐食性に優れたステンレスSUS304製。
多関節ロボット・
エアシリンダ用
スカラ
ロボット用
パラレルリンク
ロボット用
接続部品
オプション
技術資料
目盛り
単位:mm
ロボット、シリンダ取付穴
ロボット、シリンダ取付穴
10 0 10 10 0 10
目盛
目盛 10 0 10 10 0 10 10 0 10 10 0 10
6 20 パッド取付穴
P 20 パッド取付穴
A P
A
2穴タイプ 4穴タイプ
板厚:t 0.8
材質
ステンレス SUS304
用途 ロボット・シリンダ取付穴 タイプ P Q A B 重量(g) 品番 価格(円)
100 - 135 45 41 RPAC100-M5S 920
45°
4-φ5.5 2穴 150 - 185 45 57 RPAC150-M5S 1,160
D. 31.
5
P.C. 200 - 235 45 72 RPAC200-M5S 1,390
多関節ロボット用
100 40 135 60 51 RPAD100-M5S 1,160
4穴 150 50 185 70 82 RPAD150-M5S 1,390
200 70 235 90 132 RPAD200-M5S 1,740
100 - 135 30 29 RPBC100-M5S 870
4-φ4.5 2穴 150 - 185 30 41 RPBC150-M5S 1,100
エアシリンダ用 200 - 235 30 52 RPBC200-M5S 1,330
⎛ ガイド付シリンダ ⎞
⎝ ⎠ 100 40 135 60 51
チューブ内径φ12用 RPBD100-M5S 1,160
48 4穴 150 50 185 70 83 RPBD150-M5S 1,390
200 70 235 90 132 RPBD200-M5S 1,740
※上記寸法にて取付可否をご確認の上、お選びください。
※一部機種は曲げ部が干渉する恐れがあります。必要に応じて別売の接続部品「スペーサー」(P.263)をご購入ください。
接続部品 P.263 オプション P.265
t 0.8
14
▼
5.1
B
▼
5.1
Q
B
Page7
特注品 P.686 お問い合わせ P.740 発送情報 P.740 259
真
スカラロボット用 空
当日出荷 CAD CAD パ
止めネジタイプ 受付16時 2D 3 D ッ
ド
ブ
ラ
真空パッド取付ネジサイズ M5に対応。 ケ
ッ
継手、チューブをロボット軸内に収められ、配管がすっきりします。 ト
軸の面加工部でしっかりと取り付けできる仕様です。
アルミ製のため軽量です。
多関節ロボット・
エアシリンダ用
スカラ
ロボット用
単位:mm パラレルリンク
ロボット用
25±0.1
20 接続部品
10 5
2-M(90°) オプション
M5 技術資料
材質/表面処理 付属品
アルミ A2017/アルマイト(白)六角穴付止めネジ(くぼみ先 SUSXM7)…2本
内径 外径 締付ネジ
φB φD M 重量(g) 品番 価格(円)
φ16 φ24 M3×3 21 RPSC16-M5A 1,680
φ20 φ30 M4×4 32 RPSC20-M5A 1,790
φ25 φ35 M4×4 40 RPSC25-M5A 2,020
※上記寸法にて取付可否をご確認の上、お選びください。
※溝加工等が施されたシャフトにはお使いいただけない場合がございます。
取付例
■止めねじタイプ
スカラロボット シャフト
貫通穴付きタイプ
継手(六角穴付きタイプ)
おねじ付きパッド
▼
φ8
φB H8 ▼
φD±0.1
▼
Page8
■260 製品情報・各種ご請求・お問い合わせ www.iwata-fa.jp NEW お役立ち情報 monodukuri.iwata-fa.jp
真
空
パ スカラロボット用 CAD CAD
ッ 当日出荷
ド クサビタイプ 受付16時 2D 3 D
ブ
ラ
ケ
ッ 真空パッド取付ネジサイズ M5に対応。
ト 継手、チューブをロボット軸内に収められ、配管がすっきりします。
クサビ構造により、少ない力で締め付けが可能です。
アルミ製のため軽量です。
多関節ロボット・
エアシリンダ用
スカラ
ロボット用
パラレルリンク 単位:mm
ロボット用
E
接続部品
M5
オプション
技術資料
M
L±0.1
クサビ構造
材質/表面処理 付属品
アルミ A2017/アルマイト(白)六角穴付ボルト(SUSXM7)…1本クサビ(SUS304)…1個
内径 内径深さ 外径 幅 締付ネジ
φB E φD L M 重量(g) 品番 価格(円)
φ16 10 φ32 20 M3×20 42 RPSK16-M5A 1,910
φ20 10 φ35 20 M3×20 47 RPSK20-M5A 2,020
φ25 12 φ45 22 M4×18 83 RPSK25-M5A 2,260
※上記寸法にて取付可否をご確認の上、お選びください。
※溝加工等が施されたシャフトにはお使いいただけない場合がございます。
取付例
■クサビタイプ
スカラロボット シャフト
貫通穴付きタイプ
継手(六角穴付きタイプ)
おねじ付きパッド
▼
▼
φB+0.05+0.01
φD±0.1
Page9
特注品 P.686 お問い合わせ P.740 発送情報 P.740 261
真
パラレルリンクロボット用 空
当日出荷 CAD CAD パ
Eタイプ 受付16時 2D 3 D ッ
ド
ブ
ラ
真空パッド取付ネジサイズ M5に対応。 ケ
ッ
板金仕様のため、軽量でシンプルです。 ト
耐食性に優れたステンレスSUS304製。 単位:mm
W1
A 多関節ロボット・
4-φ 4
d 5° エアシリンダ用
スカラ
.C.D
. ロボット用
P
パラレルリンク
ロボット用
φB+ 00 .2 接続部品
オプション
技術資料
φ5.
1
板厚:t 2.0
A
材質 W2
ステンレス SUS304
φd P.C.D. φB A H W1 W2 重量(g) 品番 価格(円)
φ3.4 20 φ12 19 30 34 29 40 RPEA50-M5S 870
φ4.5 20 φ12 19 30 34 29 40 RPEB50-M5S 870
φ4.5 25 φ16 19 34 36 29 44 RPEC50-M5S 920
φ5.5 31.5 φ20 24 40 44 34 57 RPED50-M5S 990
※上記寸法にて取付可否をご確認の上、お選びください。
接続部品 P.263 オプション P.265
取付例
■Eタイプ
エルボ継手(めねじタイプ)
おねじ付きパッド
▼
H
▼
t 2
50
▼
Page10
■262 製品情報・各種ご請求・お問い合わせ www.iwata-fa.jp NEW お役立ち情報 monodukuri.iwata-fa.jp
真
空
パ パラレルリンクロボット用
ッ 当日出荷 CAD CAD
ド Fタイプ 受付16時 2D 3 D
ブ
ラ
ケ
ッ 真空パッド取付ネジサイズ M5に対応。
ト 板金仕様のため、軽量でシンプルです。
耐食性に優れたステンレスSUS304製。
多関節ロボット・
エアシリンダ用
スカラ
ロボット用 単位:mm
パラレルリンク
ロボット用
接続部品
オプション
技術資料
31.5
40
(11) 18 (11)
板厚:t 2.0
材質
ステンレス SUS304
品番 価格(円) 重量(g)
RPFA50-M5S 810 37
※上記寸法にて取付可否をご確認の上、お選びください。
※エルボ継手やおねじ付きパッド等はパッドの締付けが出来ない為、お使いいただけません。
※下記取付例を参考にして下さい。
接続部品 P.263 オプション P.265
取付例
■Fタイプ
継手(六角穴付きタイプ)
RPHA-M5S
(P.10)
めねじ付きパッド
▼
50
t 2 20
▼
φ5.1
2-φ5.5
Page11
特注品 P.686 お問い合わせ P.740 発送情報 P.740 263
真
接続部品 空
当日出荷 CAD CAD パ
スペーサー ッ
受付16時 2D 3 D ド
ブ
ラ
ブラケット取付時のロボットへの干渉を回避します。 ケ
ッ
ト
単位:mm
多関節ロボット・
エアシリンダ用
.5
D.
31 スカラ
C. ロボット用
P.
パラレルリンク
ロボット用
接続部品
φ40 オプション
技術資料
6
材質/表面処理 ロボット
アルミ A2017/アルマイト(白)
品番 価格(円) 重量(g) ロボット干渉回避
RPJA1 1,390 20
※上記寸法にて取付可否をご確認の上、お選びください。
オプション P.265 スペーサー
接続部品 当日出荷 CAD CAD
継手 受付16時 2D 3 D
真空パッド取付ネジサイズ M5に対応。
フラットシリーズなど板厚2.0mmの板金製品に取り付け、ネジ山を確保できます。
耐食性に優れたステンレスSUS304製。
M5
M5深6以上 単位:mm
2.5キリ
8 10
15
使用例
継手(めねじタイプ)
材質
ステンレス SUS304
品番 価格(円) 重量(g) おねじ付きパッド
RPHA-M5S 690 4
※締付トルクは3N・m以下でご使用ください。 ねじ山の飛び出しが少ない ねじ山を確保
3.5 ▼
t2
4-φ ▼5.5
3
▼
5
Page12
■264 製品情報・各種ご請求・お問い合わせ www.iwata-fa.jp NEW お役立ち情報 monodukuri.iwata-fa.jp
真
空
パ 接続部品 当日出荷 CAD CAD
ッ
ド ジョイント1 受付16時 2D 3 D
ブ
ラ
ケ
ッ 多関節ロボット用のブラケットをパラレルリンクロボットに取り付けるための
ト ジョイントです。
単位:mm
多関節ロボット・
エアシリンダ用 4-M5
スカラ (円周等分)
ロボット用
パラレルリンク 1.5
ロボット用 P.C.D
. 3
接続部品 P.C.D. 20
オプション 4-4.5キリ
8深ザグリ深4.4
技術資料 (円周等分)
6 22.5° 22.5° 4-3.4キリ
6.5深ザグリ深3.3
(円周等分)
材質/表面処理
鉄 S45C/無電解ニッケルメッキ
品番 価格(円) 重量(g)
RPJC1 2,150 41
※上記寸法にて取付可否をご確認の上、お選びください。
オプション P.265
接続部品 当日出荷 CAD CAD
ジョイント2 受付16時 2D 3 D
多関節ロボット用のブラケットをパラレルリンクロボットに取り付けるための
ジョイントです。
単位:mm
4-M5
(円周等分)
D. 31
.5
P.C.
P.C.D. 25
4-4.5キリ
8深ザグリ深4.4
6 (円周等分)
材質/表面処理
鉄 S45C/無電解ニッケルメッキ
品番 価格(円) 重量(g)
RPJC2 1,910 46
※上記寸法にて取付可否をご確認の上、お選びください。
オプション P.265
▼
φ40
φ40 φ8
φ8
▼
Page13
特注品 P.686 お問い合わせ P.740 発送情報 P.740 265
真
オプション 空
当日出荷 パ
六角穴付低頭ボルト ッ
受付16時 ド
ブ
ラ
ボルトの頭が干渉しにくい低頭ボルトです。 ケ
ッ
ト
単位:mm
多関節ロボット・
3 3.5 8 エアシリンダ用
2.5 2.8 8
スカラ
ロボット用
パラレルリンク
ロボット用
M4 M5 接続部品
RPT0408U RPT0508U
オプション
技術資料
材質/表面処理
鉄 S45C/三価クロメートメッキ(白)
ボルトサイズ 入数 品番 価格(円) 重量(g)
M4×8L 4 RPT0408U 230 6
M5×8L 4 RPT0508U 290 9
φ7
▼
▼
φ8.5
▼
Page14
■266 技術資料
真
空
パ
ッ
ド 真空パッドブラケット
ブ
ラ 多関節ロボット用 対応ロボット型式 一覧
ケ
ッ 2017 年 11月末時点
ト
最大可搬 取付ねじ 真空パッドブラケット取付対応可否※1
メーカー 型式 質量 [kg] サイズ PCD フラットシリーズ ライトシリーズ
多関節ロボット・ オムロン Viper 650 5 4-M5 31.5 ○ ○
エアシリンダ用 Viper 850 5 4-M5 31.5 ○ ○
スカラ RS003N 3 4-M5 31.5 ○ ○
ロボット用 川崎重工 RS005N 5 4-M5 31.5 ○ ○
RS005L 5 4-M5 31.5 ○ ○
パラレルリンク VP-5243 3 4-M5 31.5 ○ ○
ロボット用 VP-6242 2.5 4-M5 31.5 ○ ○
接続部品 VS-6556 7 4-M5 31.5 ○ ○
VS-6557 7 4-M5 31.5 ○ ○
デンソー VS-050 4 4-M5 31.5 ○ ○
オプション VS-060 4 4-M5 31.5 ○ ○
VS-068 7 4-M5 31.5 ○ ○
技術資料 VS-087 7 4-M5 31.5 ○ ○
VS-050S2 4 4-M5 31.5 ○ ※ 2
TVL500 3 4-M5 31.5 ○ ○
TVL700 4 4-M5 31.5 ○ ○
東芝機械 TV600 3 4-M5 31.5 ○ ○
TV800 5 4-M5 31.5 ○ ○
TV1000 5 4-M5 31.5 ○ ○
CR-4iA 4 4-M5 31.5 ○ ※ 2
CR-7iA/7iA_L 7 4-M5 31.5 ○ ○
LR Mate 200iD 7 4-M5 31.5 ○ ※ 2
LR Mate 200iD 7L 7 4-M5 31.5 ○ ※ 2
ファナック LR Mate 200iD 7WP 7 4-M5 31.5 ○ ※ 2
LR Mate 200iD 7H 7 4-M5 31.5 ○ ※ 2
LR Mate 200iD 7C 7 4-M5 31.5 ○ ○
LR Mate 200iD 7LC 7 4-M5 31.5 ○ ○
LR Mate 200iD 4SC 4 4-M5 31.5 ○ ○
RV-2FR 3 4-M5 31.5 ○ ○
RV-2FRL 3 4-M5 31.5 ○ ○
RV-4FR 4 4-M5 31.5 ○ ○
RV-4FRL 4 4-M5 31.5 ○ ○
RV-7FR 7 4-M5 31.5 ○ ○
RV-7FRL 7 4-M5 31.5 ○ ○
三菱電機 RV-2F 3 4-M5 31.5 ○ ○
RV-2FL 3 4-M5 31.5 ○ ○
RV-4F 4 4-M5 31.5 ○ ○
RV-4FL 4 4-M5 31.5 ○ ○
RV-7F 7 4-M5 31.5 ○ ○
RV-7FL 7 4-M5 31.5 ○ ○
RV-7FLL 7 4-M5 31.5 ○ ○
MOTOMAN-GP7 7 4-M5 31.5 ○ ※ 2
MOTOMAN-GP8 8 4-M5 31.5 ○ ※ 2
安川電機 MOTOMAN-MH3F 3 4-M5 31.5 ○ ○
MOTOMAN-MH5F 5 4-M5 31.5 ○ ※ 2
MOTOMAN-MH5LF 5 4-M5 31.5 ○ ※ 2
YA-R3F 3 4-M5 31.5 ○ ※ 2
ヤマハ YA-R5F 5 4-M5 31.5 ○ ※ 2
YA-R5LF 5 4-M5 31.5 ○ ※ 2
ABB IRB120 3 4-M5 31.5 ○ ○
KR3 R540 3 8-M5 31.5 ○ ※ 2
KR6 R700 sixx 6 8-M5 31.5 ○ ※ 2
KR6 R900 sixx 6 8-M5 31.5 ○ ※ 2
KUKA KR10 R900 sixx 10 8-M5 31.5 ○ ※ 2
KR10 R1100 sixx 10 8-M5 31.5 ○ ※ 2
KR6 R700 fivve 6 8-M5 31.5 ○ ※ 2
KR6 R900 fivve 6 8-M5 31.5 ○ ※ 2
KR10 R1100 fivve 10 8-M5 31.5 ○ ※ 2
TX 40 2.3 4-M5 31.5 ○ ○
STAUBLI TX2-40 2.3 4-M5 31.5 ○ ○
TX 60 9 4-M5 31.5 ○ ○
TX2-60 9 4-M5 31.5 ○ ○
※ 1 上表はロボット標準仕様での対応表です。
クリーン仕様、オイルミスト仕様、防水仕様、特殊フランジ仕様などは別売のスペーサ「RPJA1」が必要となる場
合がございます。取付可否をご確認の上、お選びください。
※ 2 真空パッドブラケットの曲げリブをロボット側に向けて取り付けると曲げリブが干渉します。
別売のスペーサ「RPJA1」と併せてご使用下さい。
上記以外のロボットへの取付けについては製品寸法にて取付可否をご確認の上、お選びください。
※ 本製品は(株)岩田製作所の独自規格品であり、表中に記載のメーカーが保証するものではありません。
Page15
技術資料 267
真
空
パ
ッ
ド
ブ
パラレルリンクロボット用 対応ロボット型式 一覧 ラ
ケ
2017 年 11月末時点 ッ
ト
取付ねじ
メーカー 型式 最大可搬 対応ブラケット 対応ジョイント
質量 [kg] サイズ PCD 品番 品番※1
YF002N 2 4-M4 25
川崎重工 RPEC50-M5S RPJC2 多関節ロボット・
YF003N 3 4-M4 25 エアシリンダ用
M-1iA/0.5A 0.5 4-M3 20 スカラ
M-1iA/0.5AL 0.5 4-M3 20 ロボット用
RPEA50-M5S RPJC1
M-1iA/0.5S 0.5 4-M3 20 パラレルリンク
M-1iA/0.5SL 0.5 4-M3 20 ロボット用
ファナック
M-2iA/3A 3 4-M4 20 接続部品
M-2iA/3AL 3 4-M4 20
RPEB50-M5S RPJC1
M-2iA/3S 3 4-M4 20 オプション
M-2iA/3SL 3 4-M4 20
MPP3H 3 4-M5 31.5
安川電機 RPED50-M5S 技術資料
―※2
MPP3S 3 4-M5 31.5 RPFA50-M5S
IRB360-1/800 1 4-M4 20
ABB IRB360-1/1130 1 4-M4 20 RPEB50-M5S RPJC1
IRB360-1/1600 1 4-M4 20
※ 1 対応ジョイントを接続して頂くと多関節ロボット用ブラケットが取付可能です。
※ 2 対応ジョイントを接続せず多関節ロボット用のブラケットが取付可能です。
上記以外のロボットへの取付けについては製品寸法にて取付可否をご確認の上、お選びください。
※ 本製品は(株)岩田製作所の独自規格品であり、表中に記載のメーカーが保証するものではありません。
エアシリンダ用 対応エアシリンダ型式 一覧
2017 年 11月末時点
チューブ内径φ12用
取付穴サイズ:14X48 4-M4
メーカー 型式 対応ブラケット品番
SGDA12X**
SGDAQ12X**
SGDAP12X**
SGDAPQ12X**
コガネイ SGDAK12X**
SGDAKQ12X**
CS-SGDAQ12X**
SGDAY12X** RPBA***-M5S
SGDAQY12X** RPBB***-M5S
STG-M-12-**
CKD RPBC***-M5S
STG-B-12-** RPBD***-M5S
MGPM12-**Z
MGPL12-**Z
SMC MGPA12-**Z
MGQM12-**
MGQL12-**
10G-3AM12N**
TAIYO
10G-3AL12N**
上記以外のシリンダへの取付けについては製品寸法にて取付可否をご確認の上、お選びください。
※ 本製品は(株)岩田製作所の独自規格品であり、表中に記載のメーカーが保証するものではありません。
Page16
■268 製品情報・各種ご請求・お問い合わせ www.iwata-fa.jp NEW お役立ち情報 monodukuri.iwata-fa.jp
真
空
パ
ッ
ド
ブ
ラ
ケ
ッ
ト
多関節ロボット・
エアシリンダ用
スカラ
ロボット用
パラレルリンク
ロボット用
接続部品
オプション
技術資料
▼
▼