




FANUC Robot CRXシリーズ対応グリッパ RLSH/RHLF/RCKL-FNシリーズは、エア駆動の為小形、軽量ながら高把持力。カンタン設定で全てのお客様の協働ロボットをサポートします。
FANUC Robot CRXシリーズ対応グリッパは、ファナック株式会社の協働ロボットに対応した空気圧式グリッパです。
専用共通フランジによる簡単設置とクランプリングによる工具レス交換を実現、専用ソフト『Pneumatic Gripper』によりティーチング時間も大幅に短縮しました。
エッジレスの樹脂カバー、及び360°視認可能なLEDインジケータランプを搭載、安全性にも高い配慮がされており、全てのお客様の協働ロボット導入をサポートします。
用途に合わせて選べる3機種をラインナップしています。
このカタログについて
| ドキュメント名 | FANUC Robot CRXシリーズ対応グリッパ RLSH/RHLF/RCKL-FNシリーズ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 1.8Mb |
| 登録カテゴリ | |
| 取り扱い企業 | CKD株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
01_表紙セールス_閲覧用_見開き
New Products 新商品
協働ロボット用グリッパ
RLSH/RHLF/RCKL-FN
シリーズ
GRIPPERS FOR COLLABORATIVE ROBOT RLSH/RHLF/RCKL-FN SERIES
FANUC Robot
CRXシリーズ対応グリッパ
CC-1525 1
Page2
FANUC Robot 協働ロボットと親和性の高い空圧式グリッパ グリーン電力
協働ロボット用グリッパは、
協働ロボット用グリッパRLSH/RHLF/RCKL-FNシリーズは、 100%自然エネルギーで
CRXシリーズ対応グリッパ 作られている製品です。
エア駆動のため小形、軽量ながら高把持力。 (グリーン電力証書による)
簡単設定で全てのお客様の協働ロボット導入を
CRX-10iA, CRX-10iA/L 対応 サポートします。 〈2020年グッドデザイン賞受賞〉
用途に合わせて選べる3機種をラインアップ
360°可視可能なインジケータランプ
把持速度は速度調整ツマミで
簡単調節
突起物やエッジ部をなくした
ラウンド形状
エア駆動のため軽量ながら
フィンガの開閉は方向制御弁※の 高把持力を実現
切り替えで、把持力はレギュレータの
調整で簡単に設定
※オプション
わずか2分でロボットに取付可能 RLSH Series RHLF Series RCKL Series
コンパクト ロングストローク 三方爪
ストローク : 18mm ストローク : 32mm ストローク : 10mm
1 ロボットに専用フランジを取付 配線コネクタ 把持力 : 42N※ 把持力 : 85N※ 把持力 : 125N※
クランプリングを回してグリッパを取付 3 質量 : 0.8kg 質量 : 1.0kg 質量 : 1.1kg
2
3 配線コネクタ接続 1 ロボットフランジ
取付完了!
2
工具レスでグリッパ交換可能
- 全シリーズ共通のロボットフランジ採用により、
段取替えはグリッパを交換するのみで完了。 ロボットの軌道を邪魔しない 高さを抑えた 円筒、丸形状のワークに
- グリッパは工具レスで交換可能、クランプリング コンパクトボディ 薄形形状のロングストローク 最適な三方爪
を手で回すだけの簡単設計。
※供給圧力0.5MPa、爪長さ(ℓ)=20mm、ストローク中心での値
ティーチング時間を1/10に エアシステムをトータルサポート
FANUC Robot CRXシリーズ対応 グリッパ駆動に必要なエア機器を各種ラインアップ、お客様に最適なシステムが構築可能。
プラグインソフト「CKD Pneumatic (詳しくは当社ホームページ、https//www.ckd.co.jp/をご参照下さい。)
Gripper」なら、シンプルな設定手順
と直感的な操作で、ティーチング時間 バルブ その他エアシステム
を大幅に短縮可能。 ●方向制御弁 ●小 形コンプレッサ
●継手 (キャリアブルエアサプライユニット)
●サイレンサ ●フィルタ、レギュレータ
●エアチューブ ●継手 ●各種センサ
命令アイコンをドラッグ&ドロップで グリッパの開・閉状態をグラフィック グリッパ開閉の教示と同時に、ロボット ●通信対応機器……等
ロボットのプログラムを作成可能。 表示で見ながらデジタルI/Oの設定 作動に必要な負荷設定情報を確認 ※ 上記4点をセットに
が可能。 し、負荷設定番号の指定が可能。 してオプション設定
しています。 ※別 途お求めください。
Page3
02_本文_閲覧用_単ページ
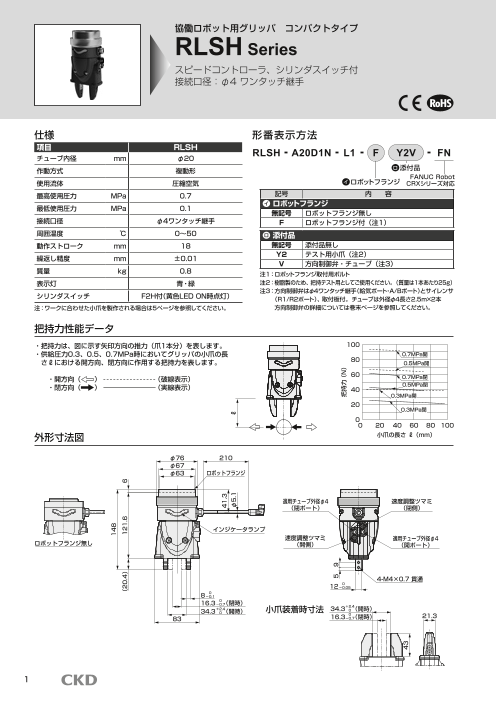
協働ロボット用グリッパ コンパクトタイプ
RLSH Series
スピードコントローラ、シリンダスイッチ付
接続口径:φ4ワンタッチ継手
仕様 形番表示方法
項目 RLSH RLSH A20D1N L1 F Y2V FN
チューブ内径 mm φ20
作動方式 複動形 ロ 添付品
FANUC Robot
使用流体 圧縮空気 イ ロボットフランジ CRXシリーズ対応
最高使用圧力 MPa 0.7 記号 内 容
イ ロボットフランジ
最低使用圧力 MPa 0.1
無記号 ロボットフランジ無し
接続口径 φ4ワンタッチ継手 F ロボットフランジ付(注1)
周囲温度 ℃ 0〜50 ロ 添付品
動作ストローク mm 18 無記号 添付品無し
繰返し精度 mm ±0.01 Y2 テスト用小爪(注2)
V 方向制御弁・チューブ(注3)
質量 kg 0.8 注1:ロボットフランジ取付用ボルト
表示灯 青・緑 注2: 樹脂製のため、把持テスト用としてご使用ください。(質量は1本あたり25g)
注3: 方向制御弁はφ4ワンタッチ継手(給気ポート・A/Bポート)とサイレンサ
シリンダスイッチ F2H付(黄色LED ON時点灯) (R1/R2ポート)、取付板付。チューブは外径φ4長さ2.5m×2本
注:ワークに合わせた小爪を製作される場合は5ページを参照してください。 方向制御弁の詳細については巻末ページを参照してください。
把持力性能データ
・把 持力は、図に示す矢印方向の推力(爪1本分)を表します。 100
・供 給圧力0.3、0.5、0.7MPa時においてグリッパの小爪の長 0.7MPa開
さℓにおける開方向、閉方向に作用する把持力を表します。 80 0.5MPa開
60
・開方向( ) (破線表示) 0.7MPa閉
・閉方向( ) (実線表示) 0.5MPa閉
40
0.3MPa開
20
0.3MPa閉
0
0 20 40 60 80 100
外形寸法図 小爪の長さ ℓ( mm)
φ76 210
φ67
φ63 ロボットフランジ
適用チューブ外径φ4 速度調整ツマミ
(閉ポート) (閉側)
インジケータランプ
速度調整ツマミ 適用チューブ外径φ4
ロボットフランジ無し (開側) (開ポート)
4-M4×0.7 貫通
12 0
−0.05
8 0
−0.1
16.3 0
−0.7(閉時)
+2.4
34.3+2.4(開時) 小爪装着時寸法 34.3 0 (開時)
0
83 16.3 0
−0.(7 閉時) 21.3
1
148
(20.4) 121.6 6
41.3
φ5.1 ℓ
5 9
把持力( N)
43
Page4
協働ロボット用グリッパ ロングストロークタイプ
RHLF Series
スピードコントローラ、シリンダスイッチ付
接続口径:φ4ワンタッチ継手
仕様 形番表示方法
項目 RHLF RHLF 16CS F Y2V FN
チューブ内径 mm φ16×2
作動方式 複動形 ロ 添付品
FANUC Robot
使用流体 圧縮空気 イ ロボットフランジ CRXシリーズ対応
最高使用圧力 MPa 0.7 記号 内 容
イ ロボットフランジ
最低使用圧力 MPa 0.2
無記号 ロボットフランジ無し
接続口径 φ4ワンタッチ継手 F ロボットフランジ付(注1)
周囲温度 ℃ 5〜50 ロ 添付品
動作ストローク mm 32 無記号 添付品無し
繰返し精度 mm ±0.03 Y2 テスト用小爪(注2)
V 方向制御弁・チューブ(注3)
質量 kg 1.0 注1:ロボットフランジ取付用ボルト
表示灯 青・緑 注2: 樹脂製のため、把持テスト用としてご使用ください。(質量は1本あたり30g)
注3: 方向制御弁はφ4ワンタッチ継手(給気ポート・A/Bポート)とサイレンサ
シリンダスイッチ T2H付(赤色LED ON時点灯) (R1/R2ポート)、取付板付。チューブは外径φ4長さ2.5m×2本
注:ワークに合わせた小爪を製作される場合は5ページを参照してください。 方向制御弁の詳細については巻末ページを参照してください。
把持力性能データ
・把 持力は、図に示す矢印方向の推力(爪1本分)を表します。 125
・ 供給圧力0.3、0.5、0.7MPa時においてグリッパの小爪の長 0.7MPa開閉
さℓにおける開方向、閉方向に作用する把持力を表します。 100
75
・開方向( )、閉方向( ) (実線表示) 0.5MPa開閉
50
0.3MPa開閉
25
0
0 20 40 60 80 100
外形寸法図 小爪の長さ ℓ( mm)
φ76 210
φ67
φ63 ロボットフランジ
適用チューブ外径φ4 適用チューブ外径φ4
(開ポート) (閉ポート)
速度調整ツマミ 速度調整ツマミ
(閉側) (開側)
インジケータランプ
ロボットフランジ無し
138
79
10±0.05
2×2-φ3+0.03
0 深3
4×2-M4×0.7 深5 小爪装着時寸法
10.7 10
31.4
32(開時)
0(閉時)
54.4(閉時)
34
86.4(開時)
2
100.8
(0.3) 94.5 6
20 41.3 ℓ
27 φ5.1
(37.3)
把持力( N)
Page5
協働ロボット用グリッパ 三方爪タイプ
RCKL Series
スピードコントローラ、シリンダスイッチ付
接続口径:φ4ワンタッチ継手
仕様 形番表示方法
項目 RCKL RCKL 40CS F Y3V FN
チューブ内径 mm φ40
作動方式 複動形 ロ 添付品
使用流体 圧縮空気 イ ロボットフランジ FANUC Robot
CRXシリーズ対応
最高使用圧力 MPa 0.7
記号 内 容
最低使用圧力 MPa 0.3 イ ロボットフランジ
接続口径 φ4ワンタッチ継手 無記号 ロボットフランジ無し
周囲温度 ℃ 5〜50 F ロボットフランジ付(注1)
動作ストローク mm 10 ロ 添付品
無記号 添付品無し
繰返し精度 mm ±0.01 Y3 小爪(注2)
質量 kg 1.1 V 方向制御弁・チューブ(注3)
表示灯 青・緑 注1:ロボットフランジ取付用ボルト
注2:受 注生産品、材質アルミ。(質量は1本あたり50g)
シリンダスイッチ T2H付(赤色LED ON時点灯) 注3: 方向制御弁はφ4ワンタッチ継手(給気ポート・A/Bポート)とサイレンサ
注:ワークに合わせた小爪を製作される場合は5ページを参照してください。 (R1/R2ポート)、取付板付。チューブは外径φ4長さ2.5m×2本
方向制御弁の詳細については巻末ページを参照してください。
把持力性能データ
・ 把持力は、図に示す矢印方向の推力(爪1本分)を表します。 250
・供 給圧力0.3、0.5、0.7MPa時においてグリッパの小爪の長 0.7MPa開
さℓにおける開方向、閉方向に作用する把持力を表します。 200
0.7MPa閉
150
・開方向( ) (破線表示) 0.5MPa開
・閉方向( ) (実線表示) 100 0.5MPa閉
0.3MPa開
50
0.3MPa閉
0
0 20 40 60 80 100
小爪の長さ ℓ( mm)
外形寸法図
φ76 210 φ85
φ67 ロボットフランジ
φ63
適用チューブ外径φ4 速度調整ツマミ
(開ポート) (閉側)
インジケータランプ
ロボットフランジ無し 速度調整ツマミ
適用チューブ外径φ4 (開側)
(閉ポート)
49
小爪装着時寸法
8 0
−0.015 3×2-M5 深さ10 2.5
20 φ77(閉時)
2-φ4.5 φ3 深4 φ87(開時)
3
119.4
4.5 12 5.4 108 6
41.3
φ5.1
21 15(開時) ℓ
10(閉時)
9 3+0.03
0
44
31
5.5 5.5
把持力( N)
Page6
協働ロボット用グリッパ
ソフトウェア「CKD Pneumatic Gripper」操作方法
本製品専用ソフトウェア「CKD Pneumatic Gripper」の操作方法概略です。詳細につきましてはロボット
マニュアル及び本製品取扱説明書を参照してください。
ソフトウエアのインストール
CKDのホームページ(https://www.ckd.co.jp)よりFANUC Robot CRXシリーズ専用のPlug & Play
ソフトウェアパッケージをダウンロードし、取扱説明書の指示に従い、ファイルをインストールします。
設置設定画面
グリッパを開閉する方向制御弁のデジタルI/Oを設定します。グラフィック表示で実際の開閉状態を確認
しながら設定できるため、信号が逆になっていないか簡単に確認できます。方向制御弁は信号遮断時の
ワーク落下を防止するため、2位置ダブルソレノイドをご使用ください。
方向制御弁のデジタルI/O設定
OPEN・CLOSE、それぞれを作動
させる方向制御弁のデジタルI/Oを
設定します。
グラフィック表示
グリッパのOPEN・CLOSE状態、
及び内蔵するシリンダスイッチの
テストボタン 作動状態を色の変化で表示します。
OPEN・CLOSEの作動確認を
行い、I/Oの設定が正しいか確認
できます。
プログラム画面
命令アイコンをドラッグ&ドロップでロボットのプログラムを作成できます。アイコン毎にプログラム詳細
設定が可能です。
・プログラム作成 ・詳細なパラメータ設定
負荷設定
グリッパ動作後の負荷設定が
可能です。ロボット本体に
登録されている負荷番号を
指定し、合計質量、重心位置、
イナーシャの組み合わせが
設定できます。
待機条件
グリッパ動作後、次の動作に
移る条件を設定できます。
待機条件として、“グリッパ
動作終了”と“時間”が指定
可能です。
4
Page7
協働ロボット用グリッパ
小爪について
● 小爪は、できるだけ軽量で短いものを使用してください。長く重いと、開閉時の慣性力が大となり、フィンガにガタが発生
したり、フィンガ摺動部の摩耗が早くなり寿命に悪影響を与える可能性があります。
● L字形状の小爪を取付けた場合の長さについては、下記のように選定してください。
例:L字形状でフィンガ方向に30mm、90度曲がって30mmの場合、小爪の長さは60mmと考える。
● 小爪の長さは把持力性能データの数値以内にしてください。
●小 爪の質量が寿命に影響するので、下表の通りにしてください。
機種 小爪1本あたりの質量W
RLSH W < 80g
RHLF W < 100g
RCKL W < 95g
フィンガに掛かる外力について
ワークの搬送・挿入などフィンガに外力が加わる場合は[表1]以内にてご使用ください。
(*搬送でご使用の場合は終端での衝撃を考慮してください。)
W1 W2
垂直荷重 曲げモーメント 横曲げモーメント
W(N) M1(N・m)=W1×L M2(N・m)=W2×L
W3
[表1]許容荷重値
捩りモーメント
機種 垂直荷重 曲げモーメント 横曲げモーメント 捩りモーメント M3(N・m)=W3×L
Wmax(N) M1max(N・m) M2max(N・m) M3max(N・m)
RLSH 198 1.8 3.6 1.8
RHLF 164 0.94 2 1.1 L:荷重が加わる点までの距離
・フィンガに掛かる外力計算例
計算例①:ワーク搬送時
形番:RLSH-A20D1N、小爪(質量mk:0.07kg,重心距離Lk=30mm)にワーク(質量m=0.7kg,重心距離L=40mm)を把持して搬送した場合
(g:重力加速度=9.8m/s2,α:終端で発生する衝撃係数=3 とした場合)
M1=α×W1×L=α×(mk×g×Lk×2+m×g×L)
=3×(0.07×9.8×30×10−3×2+0.7×9.8×40×10−3)≒0.95N・mであり M1max=1.8N・m以下のため使用可能
計算例②:ワーク挿入時
形番:RLSH-A20D1N、L=40mmに荷重W1:30Nが加わる場合
M =W ×L=30×40×10−3
1 1 =1.2N・mであり M1max=1.8N・m以下のため使用可能
5
L
L
L
L
Page8
本製品を安全にご使用いただくために
ご使用になる前に必ずお読みください
当社製品を使用した装置を設計製作される場合には、装置の機械機構と空気圧制御回路または水制御回路と
これらをコントロールする電気制御によって運転されるシステムの安全性が確保できる事をチェックして安全な
装置を製作する義務があります。
当社製品を安全にご使用いただくためには、製品の選定及び使用と取扱い、ならびに適切な保全管理が重要です。
装置の安全性確保のために、警告、注意事項を必ず守ってください。
なお、装置における安全性が確保できることをチェックして安全な装置を製作されるようにお願い申し上げます。
警告
1 本製品は、一般産業機械用装置・部品として設計、製造されたものです。
よって、取り扱いは充分な知識と経験を持った人が行ってください。
2 製品の仕様範囲内でのご使用を必ずお守りください。
製品固有の仕様外での使用は出来ません。また、製品の改造や追加工は絶対に行わないでください。
なお、本製品は一般産業機械用装置・部品での使用を適用範囲としておりますので、屋外での使用(屋外仕様品は除
きます)、および次に示すような条件や環境で使用する場合には適用外とさせていただきます。
(ただし、ご採用に際し当社にご相談いただき、当社製品の仕様をご了解いただいた場合は適用となりますが、
万一故障があっても危険を回避する安全対策を講じてください。)
❶原子力・鉄道・航空・船舶・車両・医療機械、飲料・食品などに直接触れる機器や用途、娯楽機器・緊急遮断回路・
プレス機械・ブレーキ回路・安全対策用など、安全性が要求される用途への使用。
❷人や財産に大きな影響が予想され、特に安全が要求される用途への使用。
3 装置設計・管理等に関わる安全性については、団体規格、法規等を必ずお守りください。
ISO4414、JISB8370(空気圧-システム及びその機器の一般規則及び安全要求事項)
JFPS2008(空気圧シリンダの選定及び使用の指針)
高圧ガス保安法、労働安全衛生法およびその他の安全規則、団体規格、法規など。
4 安全を確認するまでは、本製品の取り扱いおよび配管・機器の取り外しを絶対に行わないでください。
❶機械 ・装置の点検や整備は、本製品が関わる全てのシステムにおいて安全であることを確認してから行ってください。
❷運転停止時も、高温部や充電部が存在する可能性がありますので、注意して行ってください。
❸機器の点検や整備については、エネルギー源である供給空気や供給水、該当する設備の電源を遮断し、システム
内の圧縮空気は排気し、水漏れ・漏電に注意して行ってください。
❹空 気圧機器を使用した機械・装置を起動または再起動する場合、飛び出し防止処置等システムの安全が確保されて
いるか確認し、注意して行ってください。
5 事故防止のために必ず、次頁以降の警告及び注意事項をお守りください。
■ここに示した注意事項では、安全注意事項のランクを「危険」「警告」「注意」として区別してあります。
危険: 取扱いを誤った場合に、死亡または重傷を負う危険な状態が生じることが想定され、かつ危険
(DANGER)発生時の緊急性(切迫の度合い)が高い限定的な場合。
警告: 取扱いを誤った場合に、死亡または重傷を負う危険な状態が生じることが想定される場合。
(WARNING)
注意: 取扱いを誤った場合に、軽傷を負うかまたは物的損害のみが発生する危険な状態が生じること
(CAUTION)が想定される場合。
なお「注意」に記載した事項でも、状況によっては重大な結果に結び付く可能性があります。
いずれも重要な内容を記載していますので必ず守ってください。
保証について
1 保証期間
本製品の保証期間は、貴社のご指定場所への納入後1年間といたします。
2 保証範囲
上記保証期間中に明らかに当社の責任と認められる故障を生じた場合、本製品の代替品または必要な交換部品の
無償提供、または当社工場での修理を無償で行わせていただきます。
ただし、次の項目に該当する場合は、この保証の対象範囲から除外させていただきます。
①カタログ、仕様書、取扱説明書に記載されている以外の条件・環境での取扱いならびにご使用の場合
②耐久性(回数、距離、時間など)を超える場合、および消耗品に関する事由による場合
③故障の原因が本製品以外の事由による場合
④製品本来の使い方以外のご使用による場合
⑤当社が関わっていない改造または修理が原因の場合
⑥納入当時に実用化されていた技術では予見できない事由に起因する場合
⑦天災、災害など当社の責でない原因による場合
なお、ここでいう保証は、納入品単体に関するものであり、納入品の不具合により誘発される損害については
除外させていただきます。
注)耐久性および消耗品については最寄りの当社営業所にお問合わせください。
3 適合性の確認
お客様が使用されるシステム、機械、装置への当社製品の適合性は、お客様自身の責任でご確認ください。
6
Page9
空気圧機器
本製品を安全にご使用いただくために
ご使用になる前に必ずお読みください。
シリンダ一般、シリンダスイッチについては空圧シリンダ総合(CB-030S)をご確認ください。
ロボット安全に関わる法規について
下記の規格内容を十分熟読したうえでご使用ください。
ISO10218、JIS B 8433(ロボット及びロボティックデバイス)
ISO/TS 15066(ロボット及びロボティックデバイス)
個別注意事項:協働ロボット用グリッパ
設計・選定時
警告 ハネ出しによる治具への押付
移動するワークが人体に危険を及ぼす恐れのある グリッパ
場合やフィンガ小爪に指を挟む危険のある場合に
は、保護カバーを取付けるなどの安全対策を行っ
てください。
停 電やエアー源のトラブルで回路圧力が低下する
と、把持力が減少しワークが落下する恐れが生じ
ます。人体や機械装置に傷害や損傷を与えないよ
うに落下防止などの対策を施してください。 押込シリンダを用いる場合
グリッパ
注意
使 用環境 押込シリンダ
切削、鋳物、溶接工場などでは切削液、切り粉、粉塵等の
異物が進入する恐れがあります。カバーなどでこれらをで
きるだけ防いでください。
また下記環境での使用はおやめください。
切削液がかかる(液中の研磨剤または研磨粉によって摺 グリッパ
動部が削られるため)
有機溶剤、薬品、酸、アルカリ、灯油等が雰囲気中に含
まれる場合 ミニ
水がかかる スライドメカ
ストッパ
長尺物や大物ワークをつかむ場合に、安定した把
持をする為には重心をつかむことが前提条件です
が、サイズアップや複数個の使用で安定させるこ
とも必要です。 注) ワークは小爪の上をすべらせる為、グリッパの寿命を著しく低下する
恐れがあります。小爪の形状に十分の配慮が必要です。
× △ ○ ◎ 小爪の剛性が足りない場合、たわみによってフィン
ガがこじれ、動作に悪影響を与える場合があります。
スピードコントローラにてグリッパ開閉速度を調
整してください。
W W W W 高速で使用した場合、ガタ発生が早くなる場合があ
L L L L
ります。
また開閉時のショックでワークが振動しグリッパ
ワ ーク質量に対して、把持力は余裕を持たせた機 ミス、ワークの挿入ミスや、繰返し精度不良につな
種を選定してください。 がる場合があります。
ワークの大きさに対して、開閉幅は余裕を持たせ 小 口径/短ストロークのアクチュエータは高頻度で
た機種を選定してください。 動作させると条件により配管内に結露(水滴)が発
グリッパでワークを直接治具へ挿入する場合、逃 生する場合があります。急速排気弁などを用いて
げを考えて設計してください。グリッパを破損す 結露の発生防止対策をしてください。
る場合もあります。 信 号遮断時のワーク落下を防止するため、方向制御弁
は2位置ダブルソレノイドタイプをご使用ください。
7
Page10
協働ロボット用グリッパ
個別注意事項
取付・据付・調整時
注意 小 爪取付方法
フィンガへ小爪を取付ける際
ワークの脱着や搬送中にフィンガ は、グリッパ本体への影響を
や小爪に過大な負荷が掛からない グリッパ 考慮して、フィンガがこじれ
ようにしてください。フィンガの ないように、スパナ等で支え
リニアガイド転動面に傷やへこみ て締め付けてください。
が発生し、作動不良になる場合が 本体に負荷をかけない
あります。 ようにしてください
ワーク
締め付け
負荷NG
項目 使用ボルト 締付トルク(N・m)
RLSH-A20D1N M4×0.7 1.4
負荷NG RHLF-16CS M4×0.7 1.4
RCKL-40CS M5×0.8 2.8
【取付方法】 ツールコネクタ
① ロボットフランジの取り付け
クランプリングを緩めて、グリッパからロボット ツールコネクタ 配線コネクタ
フランジを取り外してください。 ロボット側 3
ロボットのフランジ面に平行ピン(添付)を挿入 平行ピン
後、ロボットフランジを六角穴付きボルト(添付) ロボットフランジ 1
4本で、ロボットに取り付けてください。 ロボットフランジ
注:締付トルク=7N・m
クランプリング
2
② グリッパの取り付け 六角穴付きボルト 4個
グリッパをロボットフランジに取り付け、クラン グリッパ
プリングを締めて取り付けてください。
注:ク ランプリングは手で強めに回して締め、
緩みがないことを確認してください。
③ コネクタ接続
グリッパのコネクタを、ロボットのツールコネ
クタに接続してください。
【電気回路図】 フランジ内インジケータランプ 方向制御弁
24V LED1 LED2 24V 24V グリッパ用シリンダスイッチ
blue green blue green
SW-F2H(RLSH)
SW-T2H(RHLF)
ツールコネクタ SW-T2H(RCKL)
CN1 CN2
1 WH 1 9 スイッチ
2 BN 2 SW1 OUT 10 BN 主回路
3 GN 3 SW2 OUT SW1 GND 11 BU
5
4 YE
4 6 4 SW1 OUT 12
3 8 7 5 GY 5 24V IN SW2 OUT 13 BN
2 1 6 PK 6 GND IN SW2 GND 14 BU
スイッチ
7 BU 7 15 主回路
8 RD 8 16
SW-F2H(RLSH)
SW-T2H(RHLF)
GND GND GND GND SW-T2H(RCKL)
【スイッチ仕様】
項目 無接点2線式
F2H T2H
用途 プログラマブルコントローラ専用
負荷電圧・電流 DC10〜30V 5〜20mA
漏れ電流 1mA以下
耐衝撃 980m/s2
質量 g 10 18
8
Page11
協働ロボット用グリッパ
方向制御弁(オプション)
記号㋺添付品 V(方向制御弁・チューブ)選択時
方向制御弁形番 その他仕様製品をご希望の際は「空圧バルブ総合(No.CB-023S)」を
4GA120R-C4-E21P-FLA28482-3-ST 参照してください。
仕様 外形寸法図
項 目 内 容
弁の種類と操作方式 パイロット式ソフトスプール弁 リード線長さ1000 2-ワンタッチ継手φ4
切換位置区分 2位置ダブルソレノイド (AWG#26,外径φ1.3) 4(A) 2(B)ポート
最高使用圧力 MPa 0.7 112
14.5 57.6
最低使用圧力 MPa 0.2
周囲温度 ℃ −5〜55(凍結なきこと)
流体温度 ℃ 5〜55
手動装置 ノンロック・ロック共用形
.4
応答時間 ms 9 2-4
流量特性 P→A/B:C=1.2、b=0.47
C【dm3(/ s・bar)】、b A/B→R1/R2:C=0.72、b=0.37 取付板(添付)
定格電圧 V DC24V
電圧変動範囲 ±10% 2-幅3.2長穴 2-サイレンサ SL-M5(添付)
12 ワンタッチ継手φ4(添付) 5(R1) 3(R2)ポート
保持電流 A 0.017 1(P)ポート
消費電力 W 0.40 22 4 方向制御弁 4GA120R-C4-E21P-3
サージキラー 内蔵 30
インジケータ ランプ内蔵
関連商品
モジュラータイプセレックスFRL カタログNo.CB-024S
■ フィルタ・レギュレータ・ルブリケータ等の主要寸法を
統一化したコンパクト・モジュラータイプ
■ 豊 富なコンビネーションで用途にあった組合せが可能
■ 高寿命エレメント採用
■ 前 面に無駄なスペースがいらないすっきりデザイン
キャリアブルエアサプライユニット ASU-S カタログNo.CC-1363
■ 持ち運びカンタン小形コンプレッサー
■ フィルタ内蔵でキレイなエアを供給
■ 連続運転可能
本製品及び関連技術を輸出される場合は、兵器・武器関連用途に使用されるおそれのないよう、ご留意ください。
If the goods and/or their replicas, the technology and/or software found in this catalog are to be exported from Japan, Japanese laws
require the exporter makes sure that they will never be used for the development and/or manufacture of weapons for mass destruction.
本社・工場 〒485-8551 愛知県小牧市応時2-250 TEL(0568)77-1111 FAX(0568)77-1123
機器営業統括部 〒485-8551 愛知県小牧市応時2-250 TEL(0568)74-1303 FAX(0568)77-3410
Overseas Sales Dept. 2-250 Ouji, Komaki City, Aichi 485-8551, Japan TEL(0568)74-1338 FAX(0568)77-3461
<Website> 東京オフィス 〒105-0013 東京都港区浜松町1-31-1(文化放送メディアプラス4階) TEL(03)5402-3620 FAX(03)5402-0120
https://www.ckd.co.jp/ 大阪オフィス 〒550-0001 大阪府大阪市西区土佐堀1-3-20 TEL(06)6459-5770 FAX(06)6446-1945
●このカタログに掲載の仕様および外観を、改善のため予告なく変更することがあります。 0120-771060
●Specifications are subject to change without notice. フリーアクセス
お客様技術相談窓口 受付時間 9:00~12:00/13:00~17:00
○C CKD Corporation 2021 All copy rights reserved. (土日、休日除く) 2021.10.C
4 17.8
63.4