




"ロボットでつかむ" の最適化 コントローラ内蔵・高把持力・ロングストロークの電動グリッパ
2フィンガタイプの電動グリッパです。
多品種ワークのハンドリングに貢献します。
このカタログについて
| ドキュメント名 | 電動アクチュエータグリッパ 2フィンガタイプ FFLDシリーズ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 24.9Mb |
| 登録カテゴリ | |
| 取り扱い企業 | CKD株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
New Products
電動アクチュエータ
グリッパ 2フィンガタイプ FFLDシリーズ
ELECTRIC ACTUATOR FFLD SERIES
"ロボットでつかむ "の最適化
高速形追加
CC-1492 3
Page2
コントローラ内蔵・高把持力・ 高汎用性
高把持力、ロングストローク
ロングストロークの電動グリッパ 把持力500N(片爪)、160mmのロングストロークを実現。
重い多品種ワークを1ツールで搬送可能です。
FFLD Series FLSH FFLD
最大ストローク mm 6〜22 7
(片側3〜11)▶
100〜160 倍以上
(片側80) アップ
最大把持力 N 20〜65
(片側) ▶ 80〜500 約8倍
(片側) アップ
多関節ロボットの先端 移動台車の
ロボット先端
安心・安全 省スペース
コントローラ内蔵
電動グリッパの本体にコントローラを内蔵。
省配線、省スペースを実現し断線リスクを低減します。
制御盤 コントローラ アクチュエータ
モータケーブル
エンコーダケーブル
PLC
ロボット先端用途に最適
ラインナップ 把持力 最大作動速度
(N) (mm/s) カタログ FFLDシリーズ
ページ 汎用ケーブル(可動)
40 80 120 300 500 10 30
制御盤 IO-Linkマスタ
標準形 FFLD 1
コントローラ基板
※ 別途電源供給が必要です。7ページのシステム構成例を参照ください。
高速形 FFLD-H 9
Page3
安心・安全 生産性向上
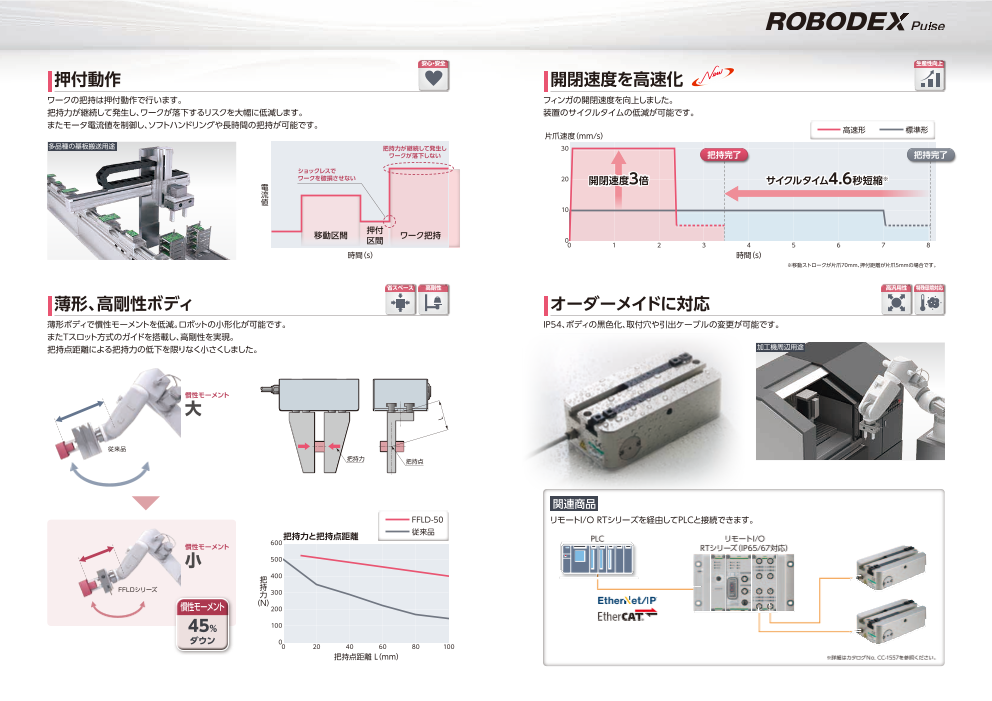
押付動作 開閉速度を高速化
ワークの把持は押付動作で行います。 フィンガの開閉速度を向上しました。
把持力が継続して発生し、ワークが落下するリスクを大幅に低減します。 装置のサイクルタイムの低減が可能です。
またモータ電流値を制御し、ソフトハンドリングや長時間の把持が可能です。 高速形 標準形
片爪速度(mm/s)
多品種の基板搬送用途 把持力が継続して発生し 30
ワークが落下しない 把持完了 把持完了
ショックレスで
ワークを破損させない 20 開閉速度3倍 サイクルタイム4.6秒短縮※
電
流
値
10
移動区間 押付
区間 ワーク把持 0
0 1 2 3 4 5 6 7 8
時間(s) 時間(s)
※移動ストロークが片爪70mm、押付距離が片爪5mmの場合です。
省スペース 高剛性 高汎用性 特殊環境対応
薄形、高剛性ボディ オーダーメイドに対応
薄形ボディで慣性モーメントを低減。ロボットの小形化が可能です。 IP54、ボディの黒色化、取付穴や引出ケーブルの変更が可能です。
またTスロット方式のガイドを搭載し、高剛性を実現。
把持点距離による把持力の低下を限りなく小さくしました。 加工機周辺用途
慣性モーメント
大
従来品
把持力 把持点
関連商品
FFLD-50 リモートI/ORTシリーズを経由してPLCと接続できます。
把持力と把持点距離 従来品
慣性モーメント 600 PLC リモートI/O
RTシリーズ(IP65/67対応)
小 500
把400
FFLDシリーズ 持
力300
慣性モーメント (N)
200
45% 100
ダウン 0
0 20 40 60 80 100
把持点距離 (L mm) ※詳細はカタログNo. CC-1557を参照ください。
L
Page5
CC-1492-3_P01-08_CC 2020
FFLD
電動アクチュエータ
モータ付仕様 グリッパ 2 フィンガタイプ
C O N T E N T S
商品紹介 巻頭
仕様・形番表示・外形寸法図
・FFLD-08 2
・FFLD-30 4
・FFLD-50 6
システム構成 18
フィールドネットワーク説明 19
機種選定 20
技術資料 22
使用上の注意事項 24
機種選定チェックシート 32
1
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
Page6
電動アクチュエータ グリッパ 2フィンガタイプ
FFLD-08
□20ステッピングモータ
形番表示方法
FFLD 08 50 N C N 30 LK S R00
A B C D
A把持力 Cインタフェース仕様
08 80N LK IO-Link
Bストローク D中継ケーブル
50 100mm(片側50mm) R00 可動ケーブル
仕様 把持力と押付率
モータ □20 ステッピングモータ
エンコーダ種別 インクリメンタルエンコーダ
駆動方式 ラック・ピニオン、ウォームギア
コントローラ 内蔵 フィンガ
ストローク mm 100(片側50)
最大把持力 ※1 N 80(片側)
開閉速度範囲 mm/s 1~10(片側) 小爪(治具)
把持速度範囲 ※1 mm/s 1~5(片側)
繰返し精度 ※2 mm ±0.02
F F
繰返し位置決め精度 ※3 mm ±0.05(片側)
ロストモーション mm 0.4以下(片側)
静的許容モーメント N・m MP=15、MY=15、MR=15 F:把持力
ワーク L :把持点距離
設定ツール 設定ソフト(S-Tools)
外部インタフェース IO-Link
通信・制御 DC24V±10%
電源電圧 100
動力 DC24V±10%
80
通信・制御 A 0.2以下 把
消費電流 持
動力 A 1.1以下 力60
モータ部瞬間最大電流 A 1.5 (
N 40
電源容量 最大100W )20
絶縁抵抗 10MΩ、DC500V
耐電圧 AC500V1分間 0
20 40 60 80 100
使用周囲温度、湿度 0~40℃(凍結なきこと) 押付率(%)
35~80%RH(結露なきこと)
保存周囲温度、湿度 -10~50℃(凍結なきこと) ※ 把持力と押付率の相関図は目安を示すものです。
押付率が同じでもモータの個体差、機械効率のばらつきにより、実際の数
35~80%RH(結露なきこと) 字とは誤差が生じます。
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと ※ 把持の速度は5mm/sの場合です。(L=30)
※ 押付率の設定範囲は30~100%です。
保護構造 IP20
質量 kg 1.2
※1 把持は押付動作にて行います。
※2 繰返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の
ばらつきを示します。
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきを
示します。
2
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
L=30
Page7
FFLD-08 Series
外形寸法図
外形寸法図
115
ストローク50 61 (1~3)
106 5
15
2×2-M5深さ10
2-φ4.3貫通 φ7.5座ぐり深さ5.5
10 5+0.03
0 (深さ3)
(1~3) 61 引出しケーブル長さ300mm
65 ストローク50 ※ 可動ケーブルです
最小屈曲半径25mm
8 0
-0.04
B C
27.5
A
3 +0.05
+0.02 深さ3
A長穴部寸法
2-M5深さ10
φ3+0.05
+0.02 深さ3
手動操作軸
φ
M3深さ5 USBコネクタ 23
5 (アース接続用) (mini-B) 18
B矢視図 C矢視図
3
44 48 78.5 (4.5)
3 26.2
20
2
(1.2)
2 15
18
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
1.5
2-R
Page8
電動アクチュエータ グリッパ 2フィンガタイプ
FFLD-30
□25Lステッピングモータ
形番表示方法
FFLD 30 70 N C N 30 LK S R00
A B C D
A把持力 Cインタフェース仕様
30 300N LK IO-Link
Bストローク D中継ケーブル
70 140mm(片側70mm) R00 可動ケーブル
仕様 把持力と押付率
モータ □25L ステッピングモータ
エンコーダ種別 インクリメンタルエンコーダ
駆動方式 ラック・ピニオン、ウォームギア
コントローラ 内蔵 フィンガ
ストローク mm 140(片側70)
最大把持力 ※1 N 300(片側)
開閉速度範囲 mm/s 1~10(片側) 小爪(治具)
把持速度範囲 ※1 mm/s 1~5(片側)
繰返し精度 ※2 mm ±0.02
F F
繰返し位置決め精度 ※3 mm ±0.05(片側)
ロストモーション mm 0.4以下(片側)
静的許容モーメント N・m MP=45、MY=45、MR=45 F:把持力
ワーク L :把持点距離
設定ツール 設定ソフト(S-Tools)
外部インタフェース IO-Link
通信・制御 DC24V±10%
電源電圧 350
動力 DC24V±10% 300
通信・制御 A 0.2以下 把 250
消費電流 持
動力 A 2.8以下 力 200
モータ部瞬間最大電流 A 4.0 ( 150
電源容量 最大100W ) 100
絶縁抵抗 10MΩ、DC500V 50
耐電圧 AC500V1分間 0
20 40 60 80 100
使用周囲温度、湿度 0~40℃(凍結なきこと) 押付率(%)
35~80%RH(結露なきこと)
保存周囲温度、湿度 -10~50℃(凍結なきこと) ※ 把持力と押付率の相関図は目安を示すものです。
押付率が同じでもモータの個体差、機械効率のばらつきにより、実際の数
35~80%RH(結露なきこと) 字とは誤差が生じます。
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと ※ 把持の速度は5mm/sの場合です。(L=30)
※ 押付率の設定範囲は30~100%です。
保護構造 IP20
質量 kg 1.7
※1 把持は押付動作にて行います。
※2 繰返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の
ばらつきを示します。
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきを
示します。
4
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
L=30
N
Page9
FFLD-30 Series
外形寸法図
外形寸法図
155
ストローク70 83.5 (0~2)
143 5
15
2×2-M6深さ10
2-φ4.3貫通 φ7.5座ぐり深さ5.5
引出しケーブル長さ300mm
85 ストローク70 ※ 可動ケーブルです
10 5+0.03
0 (深さ3) 最小屈曲半径25mm
(0~2) 83.5
10 0
-0.04
B C
31
A
3 +0.05
+0.02 深さ3
A長穴部寸法
2-M5深さ10
φ3 +0.05
+0.02 深さ3
手動操作軸
φ2
M3深さ5 USBコネクタ 3
28
8 (mini-B)
(アース接続用)
B矢視図 C矢視図
5
65 85 (4.5)53
3 28.2
25
(1.2)
2 15
21.5
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
2-R
1.5
Page10
電動アクチュエータ グリッパ 2フィンガタイプ
FFLD-50
□25Lステッピングモータ
形番表示方法
FFLD 50 80 N C N 30 LK S R00
A B C D
A把持力 Cインタフェース仕様
50 500N LK IO-Link
Bストローク D中継ケーブル
80 160mm(片側80mm) R00 可動ケーブル
仕様 把持力と押付率
モータ □25L ステッピングモータ
エンコーダ種別 インクリメンタルエンコーダ
駆動方式 ラック・ピニオン、ウォームギア
コントローラ 内蔵 フィンガ
ストローク mm 160(片側80)
最大把持力 ※1 N 500(片側)
開閉速度範囲 mm/s 1~10(片側) 小爪(治具)
把持速度範囲 ※1 mm/s 1~5(片側)
繰返し精度 ※2 mm ±0.02
F F
繰返し位置決め精度 ※3 mm ±0.05(片側)
ロストモーション mm 0.4以下(片側)
静的許容モーメント N・m MP=64、MY=55、MR=64 F:把持力
ワーク L :把持点距離
設定ツール 設定ソフト(S-Tools)
外部インタフェース IO-Link
通信・制御 DC24V±10%
電源電圧 600
動力 DC24V±10% 500
通信・制御 A 0.2以下 把
消費電流 持 400
動力 A 2.8以下 力
( 300
モータ部瞬間最大電流 A 4.0 N 200
電源容量 最大100W )
100
絶縁抵抗 10MΩ、DC500V 0
耐電圧 AC500V1分間 20 40 60 80 100
押付率(%)
使用周囲温度、湿度 0~40℃(凍結なきこと)
35~80%RH(結露なきこと)
保存周囲温度、湿度 -10~50℃(凍結なきこと) ※ 把持力と押付率の相関図は目安を示すものです。
押付率が同じでもモータの個体差、機械効率のばらつきにより、実際の数
35~80%RH(結露なきこと) 字とは誤差が生じます。
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと ※ 把持の速度は5mm/sの場合です。(L=30)
※ 押付率の設定範囲は30~100%です。
保護構造 IP20
質量 kg 2.5
※1 把持は押付動作にて行います。
※2 繰返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の
ばらつきを示します。
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきを
示します。
6
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
L=30
Page11
FFLD-50 Series
外形寸法図
外形寸法図
177
ストローク80 97 (-0.8~1.2)
162
16 5.5
4-R15
2×2-M6深さ12
2-φ5.5貫通
φ9.5座ぐり深さ5.5
11 5+0.05
0 (深さ3) 引出しケーブル長さ
(-0.8~1.2) 97 ストローク80 300mm
98.2 ※ 可動ケーブルです
最小屈曲半径25mm
12 0
-0.04
R2
B C
19
94
A
2-M6深さ12
φ6.5座ぐり深さ4.5 (2-R2.5)
1
φ5 +0.05
+0.02 深さ3 A長穴部寸法
USBコネクタ
(mini-B)
手動操作軸 φ30
M3深さ6 30.5 M3深さ6
10 (アース接続用)
27.5
B矢視図 C矢視図
7
92
32
58.5
(12) 3
19
22
22
5 +0.05
+0.02 深さ3
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
Page12
8
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
Page13
CC-1492-3_P09-17_CC 2020
FFLD-H
電動アクチュエータ
モータ付仕様 グリッパ 2 フィンガタイプ 高速形
C O N T E N T S
商品紹介 巻頭
仕様・形番表示・外形寸法図
・FFLD-04H 10
・FFLD-12H 12
・FFLD-30H 14
・FFLD-50H 16
システム構成 18
フィールドネットワーク説明 19
機種選定 20
技術資料 22
使用上の注意事項 24
機種選定チェックシート 32
9
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
Page14
電動アクチュエータ グリッパ 2フィンガタイプ 高速形
FFLD-04H
□20ステッピングモータ
形番表示方法
FFLD 04 H 50 N C N 30 LK S R00
A B C D
A把持力 Cインタフェース仕様
04 40N LK IO-Link
Bストローク D中継ケーブル
50 100mm(片側50mm) R00 可動ケーブル
仕様 把持力と押付率
モータ □20 ステッピングモータ
エンコーダ種別 インクリメンタルエンコーダ
駆動方式 ラック・ピニオン、ウォームギア
コントローラ 内蔵 フィンガ
ストローク mm 100(片側50)
最大把持力 ※1 N 40(片側)
開閉速度範囲 mm/s 1~30(片側) 小爪(治具)
把持速度範囲 ※1 mm/s 1~5(片側)
繰返し精度 ※2 mm ±0.02
F F
繰返し位置決め精度 ※3 mm ±0.05(片側)
ロストモーション mm 0.4以下(片側)
静的許容モーメント N・m MP=15、MY=15、MR=15 F:把持力
ワーク L :把持点距離
設定ツール 設定ソフト(S-Tools)
外部インタフェース IO-Link
通信・制御 DC24V±10%
電源電圧 60
動力 DC24V±10%
通信・制御 A 0.2以下 把
消費電流 持40
動力 A 1.1以下 力
モータ部瞬間最大電流 A 1.5 (
N
電源容量 最大100W 20
)
絶縁抵抗 10MΩ、DC500V
耐電圧 AC500V1分間 0
20 40 60 80 100
使用周囲温度、湿度 0~40℃(凍結なきこと)
35~80%RH(結露なきこと) 押付率(%)
保存周囲温度、湿度 -10~50℃(凍結なきこと) ※ 把持力と押付率の相関図は目安を示すものです。
押付率が同じでもモータの個体差、機械効率のばらつきにより、実際の数
35~80%RH(結露なきこと) 字とは誤差が生じます。
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと ※ 把持の速度は5mm/sの場合です。(L=30)
※ 押付率の設定範囲は30~100%です。
保護構造 IP20
質量 kg 1.2
※1 把持は押付動作にて行います。
※2 繰返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の
ばらつきを示します。
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきを
示します。
10
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
L=30
Page15
FFLD-04H Series
外形寸法図
外形寸法図
115
ストローク50 61 (1~3)
106 5
15
2×2-M5深さ10
2-φ4.3貫通 φ7.5座ぐり深さ5.5
10 5+0.03
0 (深さ3)
(1~3) 61 引出しケーブル長さ300mm
65 ストローク50 ※ 可動ケーブルです
最小屈曲半径25mm
8 0
-0.04
B C
27.5
A
3 +0.05
+0.02 深さ3
A長穴部寸法
2-M5深さ10
φ3+0.05
+0.02 深さ3
手動操作軸
φ
M3深さ5 USBコネクタ 23
5 (アース接続用) (mini-B) 18
B矢視図 C矢視図
11
44 48 78.5 (4.5)
3 26.2
20
2
(1.2)
2 15
18
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
.5
2-R
1
Page16
電動アクチュエータ グリッパ 2フィンガタイプ 高速形
FFLD-12H
□25Lステッピングモータ
形番表示方法
FFLD 12 H 70 N C N 30 LK S R00
A B C D
A把持力 Cインタフェース仕様
12 120N LK IO-Link
Bストローク D中継ケーブル
70 140mm(片側70mm) R00 可動ケーブル
仕様 把持力と押付率
モータ □25L ステッピングモータ
エンコーダ種別 インクリメンタルエンコーダ
駆動方式 ラック・ピニオン、ウォームギア
コントローラ 内蔵 フィンガ
ストローク mm 140(片側70)
最大把持力 ※1 N 120(片側)
開閉速度範囲 mm/s 1~30(片側) 小爪(治具)
把持速度範囲 ※1 mm/s 1~5(片側)
繰返し精度 ※2 mm ±0.02
F F
繰返し位置決め精度 ※3 mm ±0.05(片側)
ロストモーション mm 0.4以下(片側)
静的許容モーメント N・m MP=45、MY=45、MR=45 F:把持力
ワーク L :把持点距離
設定ツール 設定ソフト(S-Tools)
外部インタフェース IO-Link
通信・制御 DC24V±10%
電源電圧 140
動力 DC24V±10% 120
通信・制御 A 0.2以下 把
消費電流 100
動力 A 2.8以下 持
力 80
モータ部瞬間最大電流 A 4.0 ( 60
N
電源容量 最大100W ) 40
絶縁抵抗 10MΩ、DC500V 20
耐電圧 AC500V1分間 0
20 40 60 80 100
使用周囲温度、湿度 0~40℃(凍結なきこと)
35~80%RH(結露なきこと) 押付率(%)
保存周囲温度、湿度 -10~50℃(凍結なきこと) ※ 把持力と押付率の相関図は目安を示すものです。
押付率が同じでもモータの個体差、機械効率のばらつきにより、実際の数
35~80%RH(結露なきこと) 字とは誤差が生じます。
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと ※ 把持の速度は5mm/sの場合です。(L=30)
※ 押付率の設定範囲は30~100%です。
保護構造 IP20
質量 kg 1.7
※1 把持は押付動作にて行います。
※2 繰返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の
ばらつきを示します。
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきを
示します。
12
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
L=30
Page17
FFLD-12H Series
外形寸法図
外形寸法図
155
ストローク70 83.5 (0~2)
143 5
15
2×2-M6深さ10
2-φ4.3貫通 φ7.5座ぐり深さ5.5
引出しケーブル長さ300mm
85 ストローク70 ※ 可動ケーブルです
10 5+0.03
0 (深さ3) 最小屈曲半径25mm
(0~2) 83.5
10 0
-0.04
B C
31
A
3 +0.05
+0.02 深さ3
A長穴部寸法
2-M5深さ10
φ3 +0.05
+0.02 深さ3
手動操作軸
φ2
M3深さ5 USBコネクタ 3
28
8 (mini-B)
(アース接続用)
B矢視図 C矢視図
13
65 85 (4.5)53
3 28.2
25
(1.2)
2 15
21.5
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
2-R
1.5
Page18
電動アクチュエータ グリッパ 2フィンガタイプ 高速形
FFLD-30H
□25Lステッピングモータ
形番表示方法
FFLD 30 H 70 N C N 30 LK S R00
A B C D
A把持力 Cインタフェース仕様
30 300N LK IO-Link
Bストローク D中継ケーブル
70 140mm(片側70mm) R00 可動ケーブル
仕様 把持力と押付率
モータ □25L ステッピングモータ
エンコーダ種別 インクリメンタルエンコーダ
駆動方式 ラック・ピニオン、ウォームギア
コントローラ 内蔵 フィンガ
ストローク mm 140(片側70)
最大把持力 ※1 N 300(片側)
開閉速度範囲 mm/s 1~30(片側) 小爪(治具)
把持速度範囲 ※1 mm/s 1~5(片側)
繰返し精度 ※2 mm ±0.02
F F
繰返し位置決め精度 ※3 mm ±0.05(片側)
ロストモーション mm 0.4以下(片側)
静的許容モーメント N・m MP=45、MY=45、MR=45 F:把持力
ワーク L :把持点距離
設定ツール 設定ソフト(S-Tools)
外部インタフェース IO-Link
通信・制御 DC24V±10%
電源電圧 350
動力 DC24V±10% 300
通信・制御 A 0.2以下 把 250
消費電流 持
動力 A 2.8以下 力 200
モータ部瞬間最大電流 A 4.0 ( 150
N
電源容量 最大100W ) 100
絶縁抵抗 10MΩ、DC500V 50
耐電圧 AC500V1分間 0
20 40 60 80 100
使用周囲温度、湿度 0~40℃(凍結なきこと) 押付率(%)
35~80%RH(結露なきこと)
保存周囲温度、湿度 -10~50℃(凍結なきこと) ※ 把持力と押付率の相関図は目安を示すものです。
押付率が同じでもモータの個体差、機械効率のばらつきにより、実際の数
35~80%RH(結露なきこと) 字とは誤差が生じます。
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと ※ 把持の速度は5mm/sの場合です。(L=30)
※ 押付率の設定範囲は30~100%です。
保護構造 IP20
質量 kg 1.7
※1 把持は押付動作にて行います。
※2 繰返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の
ばらつきを示します。
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきを
示します。
14
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
L=30
Page19
FFLD-30H Series
外形寸法図
外形寸法図
155
ストローク70 83.5 (0~2)
143 5
15
2×2-M6深さ10
2-φ4.3貫通 φ7.5座ぐり深さ5.5
引出しケーブル長さ300mm
85 ストローク70 ※ 可動ケーブルです
10 5+0.03
0 (深さ3) 最小屈曲半径25mm
(0~2) 83.5
10 0
-0.04
B C
31
A
3 +0.05
+0.02 深さ3
A長穴部寸法
2-M5深さ10
φ3 +0.05
+0.02 深さ3
手動操作軸
φ2
M3深さ5 USBコネクタ 3
28
8 (mini-B)
(アース接続用)
B矢視図 C矢視図
15
65 85 (4.5)53
3 28.2
25
(1.2)
2 15
21.5
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
2-R
1.5
Page20
電動アクチュエータ グリッパ 2フィンガタイプ 高速形
FFLD-50H
□35ステッピングモータ
形番表示方法
FFLD 50 H 80 N C N 30 LK S R00
A B C D
A把持力 Cインタフェース仕様
50 500N LK IO-Link
Bストローク D中継ケーブル
80 160mm(片側80mm) R00 可動ケーブル
仕様 把持力と押付率
モータ □35 ステッピングモータ
エンコーダ種別 インクリメンタルエンコーダ
駆動方式 ラック・ピニオン、ウォームギア
コントローラ 内蔵 フィンガ
ストローク mm 160(片側80)
最大把持力 ※1 N 500(片側)
開閉速度範囲 mm/s 1~30(片側) 小爪(治具)
把持速度範囲 ※1 mm/s 1~5(片側)
繰返し精度 ※2 mm ±0.02
F F
繰返し位置決め精度 ※3 mm ±0.05(片側)
ロストモーション mm 0.4以下(片側)
静的許容モーメント N・m MP=64、MY=55、MR=64 F:把持力
ワーク L :把持点距離
設定ツール 設定ソフト(S-Tools)
外部インタフェース IO-Link
通信・制御 DC24V±10%
電源電圧 600
動力 DC24V±10% 500
通信・制御 A 0.2以下 把
消費電流 持 400
動力 A 2.8以下 力
( 300
モータ部瞬間最大電流 A 4
N 200
電源容量 最大100W )
絶縁抵抗 100
10MΩ、DC500V
耐電圧 AC500V1分間 0
20 40 60 80 100
使用周囲温度、湿度 0~40℃(凍結なきこと) 押付率(%)
35~80%RH(結露なきこと)
保存周囲温度、湿度 -10~50℃(凍結なきこと) ※ 把持力と押付率の相関図は目安を示すものです。
押付率が同じでもモータの個体差、機械効率のばらつきにより、実際の数
35~80%RH(結露なきこと) 字とは誤差が生じます。
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと ※ 把持の速度は5mm/sの場合です。(L=30)
※ 押付率の設定範囲は30~100%です。
保護構造 IP20
質量 kg 2.7
※1 把持は押付動作にて行います。
※2 繰返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の
ばらつきを示します。
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきを
示します。
16
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
L=30