


『OptiTrack システムカタログ』は、動きをデジタル化するシステムを
提案している当社のカタログです。
動きをデジタル化する「OptiTrack」システムは、リアルタイムにモノや人の動きを取得し、かつ、直感的に解析するソフトウェアで構成され、より効率的な計測を実現します。
【掲載内容】
・システム概要と特徴
・OptiTrackの原理
・カメラ設置から解析までの一連の流れ
・事例:工業計測 / 制御 / 動作分析
・OptiTrackの精度
・システム構成表
このカタログについて
| ドキュメント名 | OptiTrack システムカタログ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 631.9Kb |
| 登録カテゴリ | |
| 取り扱い企業 | アキュイティー株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
システム構成表
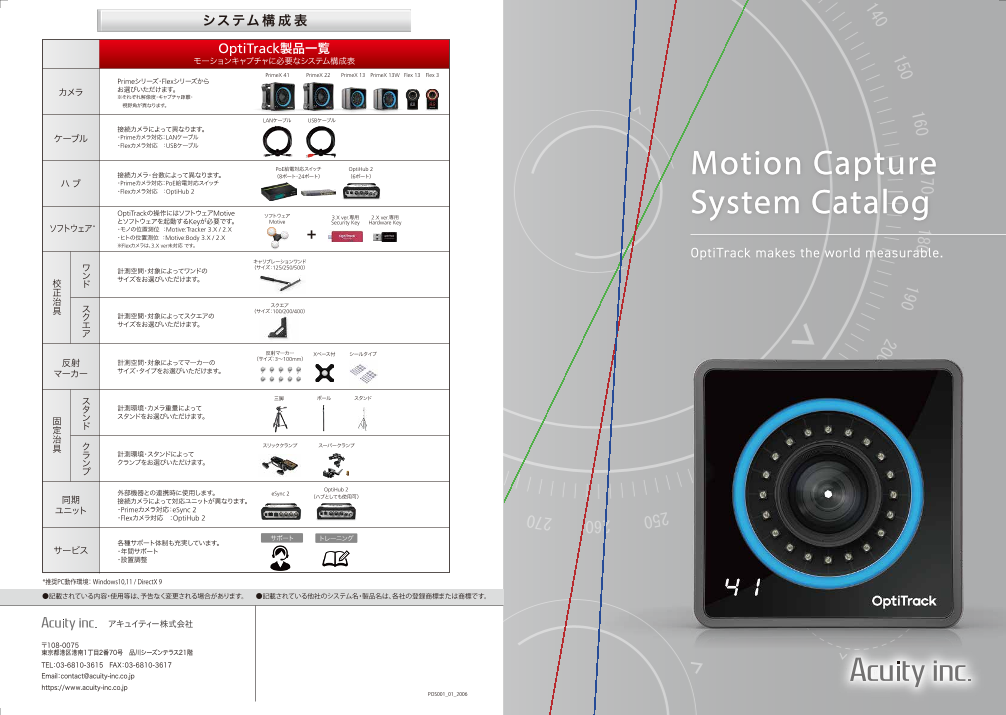
OptiTrack製品一覧
モーションキャプチャに必要なシステム構成表
PrimeX 41 PrimeX 22 PrimeX 13 PrimeX 13W Flex 13 Flex 3
Primeシリーズ・Flexシリーズから
カメラ お選びいただけます。
※それぞれ解像度・キャプチャ距離・
視野角が異なります。
LANケーブル USBケーブル
接続カメラによって異なります。
ケーブル ・Primeカメラ対応:LANケーブル
・Flexカメラ対応 :USBケーブル
PoE給電対応スイッチ OptiHub 2
接続カメラ・台数によって異なります。 Motion Capture
(8ポート・24ポート) (6ポート)
ハ ブ ・Primeカメラ対応:PoE給電対応スイッチ
・Flexカメラ対応 :OptiHub 2
OptiTrackの操作にはソフトウェアMotive System Catalog
ソフトウェア
とソフトウェアを起動するKeyが必要です。 3.X ver.専用 2.X ver.専用
Motive Security Key Hardware Key
ソフトウェア* ・モノの位置測位 :Motive:Tracker 3.X / 2.X
・ヒトの位置測位 :Motive:Body 3.X / 2.X +
※Flexカメラは、3.X ver未対応 です。
OptiTrack makes the world measurable.
キャリブレーションワンド
ワ 計測空間・対象によってワンドの (サイズ:125/250/500)
ン
校 ド サイズをお選びいただけます。
正
治
具 ス スクエア
(サイズ:100/200/400)
ク 計測空間・対象によってスクエアの
エ サイズをお選びいただけます。
ア
反射マーカー Xベース付 シールタイプ
反射 計測空間・対象によってマーカーの (サイズ:3~100mm)
マーカー サイズ・タイプをお選びいただけます。
ス 三脚 ポール スタンド
タ 計測環境・カメラ重量によって
固 ン スタンドをお選びいただけます。
定 ド
治
具 ク スリッククランプ スーパークランプ
ラ 計測環境・スタンドによって
ン クランプをお選びいただけます。
プ
外部機器との連携時に使用します。 OptiHub 2
eSync 2
同期 接続カメラによって対応ユニットが異なります。 (ハブとしても使用可)
ユニット ・Primeカメラ対応:eSync 2
・Flexカメラ対応 :OptiHub 2
各種サポート体制も充実しています。 サポート トレーニング
サービス ・年間サポート
・設置調整
*推奨PC動作環境: Windows10,11 / DirectX 9
●記載されている内容・使用等は、予告なく変更される場合があります。 ●記載されている他社のシステム名・製品名は、各社の登録商標または商標です。
〒108-0075
東京都港区港南1丁目2番70号 品川シーズンテラス21階
TEL:03-6810-3615 FAX:03-6810-3617
Emai:l contact@acuity-inc.co.jp
https://www.acuity-inc.co.jp
POS001_01_2006
Page2
システム概要と特徴
コントロールソフトウェア
校正治具
マーカー
OptiTrack Motive: Tracker OptiTrack Motive: Body
カメラ
固定治具
ワンド スクエア
NatNet SDK
ハブ コントロール
ケーブル ソフトウェア 6自由度のデータを取得可能 Motive Trackerの機能 +
全身骨格モデルのデータを取得可能
非接触 高精度
工業計測 制 御 動作分析
モーションキャプチャカメラで計測対象を囲い、計測点に貼付した ミクロン単位で校正され、かつ計測環境における温度変化の影響を
マーカーの位置座標を取得します。そのため、対象に触れることな 受けにくい校正治具で常にキャリブレーションを行うため、高精度
く非接触のワイヤレス計測を実現します。対象の動きを制限すること な計測を実現します。リファレンスゲージでの精度検証の結果、測定
なく大小様々なサイズのキャプチャができます。 精度は0.1mm以下が実証されています。
3次元 リアルタイム
対象の計測したい箇所に反射マーカーを貼付するだけで、3次元位置 データ取得後の各種物理量(変位・速度・加速度等)の演算が、実験 素材(木材・コンクリート等)の変位計測 ドローン 技術伝承
座標をリアルタイムに取得します。チャンネルごとの校正や軸合わせ 中にリアルタイムに行えます。後処理や計算は不要です。実験の状況
は不要で、100点以上の計測点を同時に3次元計測できます。チャン を常に把握できるため、やり直しの防止や試験条件のチェックが行
ネル数に応じての工数は比例しません。 えます。
の原理
① 計測点(マーカー)の認識 ② 3次元化 部品の性能評価 VR/AR スポーツ分析
OptiTrackのカメラは、赤外線のストロボを搭載しています。計測 1台のカメラから送られてくる2次元の位置座標(X,Y)から、キャリ
点に貼付されたマーカーがその光を反射するため、カメラはマー ブレーション情報を基に三角測量の原理で3次元座標値を算出
カーの位置を認識することができます。またカメラにストロボの波 します。そのため1つのマーカーの3次元座標値を取得するために
長850nmのみを通すフィルタが内蔵されており、マーカーだけ は、2台以上のカメラから見えている必要があります。さらに交点
をきれいに捉えます。さらにカメラ内部には画像処理エンジンが搭 より導き出される奥行(Z)の精度を上げるためには、3台以上の
載されているため、マーカーの位置座標(X,Y)を計算し、PCに カメラから見えていることが理想とされます。
データを送ります。
設備機器・完成品の品質保証 ロボット 手指解析
の精度
信頼性の高い計測精度
カメラ設置から解析までの一連の流れ ● 本検証では、ISO10360を参考に、光学式3D挙動計測において妥当性の
ある検証方法を起案し、基準器の真値との比較検証結果を元に保証精
度を算出しました。
設置 キャリブレーション 計測 解析 その結果が下記及び右図の測定誤差のヒストグラムとなります。
● カメラ設置 ● カメラ同士の ● マーカー貼付 ● 計測データ出力 任意の配置条件 : 測定精度(1σ) 0.084mm
● ソフトウェア起動 位置と角度を定義 ● 動きを計測 ● CSVで解析 繰返し性(1σ) 0.075mm
● 画角調整 ● 原点設定 ● 解析ソフトへ取り込み 測定環境等の条件及び結果の詳細はこちら ▶
10~30分 3~5分 ● 計測内容に応じて変動
● 計測と並行でリアルタイム解析可能