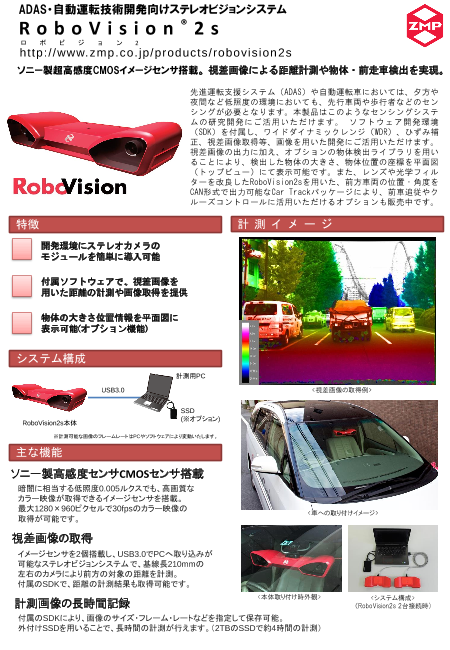



ソニー製超高感度CMOSイメージセンサ搭載。視差画像による距離計測や物体・前走車検出を実現
先進運転支援システム(ADAS)や自動運転車においては、夕方や夜間など低照度の環境においても、先行車両や歩行者などのセンシングが必要となります。本製品はこのようなセンシングシステムの研究開発にご活用いただけます。 ソフトウェア開発環境(SDK)を付属し、ワイドダイナミックレンジ(WDR)、ひずみ補正、視差画像取得等、画像を用いた開発にご活用いただけます。
視差画像の出力に加え、オプションの物体検出ライブラリを用いることにより、検出した物体の大きさ、物体位置の座標を平面図(トップビュー)にて表示可能です。また、レンズや光学フィルターを改良したRoboVision2sを用いた、前方車両の位置・角度をCAN形式で出力可能なCar Trackパッケージにより、前車追従やクルーズコントロールに活用いただけるオプションも販売中です。
◆詳細は、カタログをダウンロードしてご覧ください。
このカタログについて
| ドキュメント名 | ADAS・自動運転技術開発向けステレオビジョンシステム RoboVision(R) 2s |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 550.4Kb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社ZMP (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
ADAS・自動運転技術開発向けステレオビジョンシステム
R o b o V i s i o n ® 2 s
ロ ボ ビ ジ ョ ン 2
http: / /www.zmp.co. jp/products/ robovis ion2s
ソニー製超高感度CMOSイメージセンサ搭載。視差画像による距離計測や物体・前走車検出を実現。
先進運転支援システム(ADAS)や自動運転車においては、夕方や
夜間など低照度の環境においても、先行車両や歩行者などのセン
シングが必要となります。本製品はこのようなセンシングシステ
ムの研究開発にご活用いただけます。 ソフトウェア開発環境
(SDK)を付属し、ワイドダイナミックレンジ(WDR)、ひずみ補
正、視差画像取得等、画像を用いた開発にご活用いただけます。
視差画像の出力に加え、オプションの物体検出ライブラリを用い
ることにより、検出した物体の大きさ、物体位置の座標を平面図
(トップビュー)にて表示可能です。また、レンズや光学フィル
ターを改良したRoboVision2sを用いた、前方車両の位置・角度を
CAN形式で出力可能なCar Trackパッケージにより、前車追従やク
ルーズコントロールに活用いただけるオプションも販売中です。
特徴 計 測 イ メ ー ジ
開発環境にステレオカメラの
モジュールを簡単に導入可能
付属ソフトウェアで、視差画像を
用いた距離の計測や画像取得を提供
物体の大きさ位置情報を平面図に
表示可能(オプション機能)
システム構成
計測用PC
USB3.0 <視差画像の取得例>
SSD
(※オプション)
RoboVision2s本体
※計測可能な画像のフレームレートはPCやソフトウェアにより変動いたします。
主な機能
ソニー製高感度センサCMOSセンサ搭載
暗闇に相当する低照度0.005ルクスでも、高画質な
カラー映像が取得できるイメージセンサを搭載。
最大1280×960ピクセルで30fpsのカラー映像の
<車への取り付けイメージ>
取得が可能です。
視差画像の取得
イメージセンサを2個搭載し、USB3.0でPCへ取り込みが
可能なステレオビジョンシステムで、基線長210mmの
左右のカメラにより前方の対象の距離を計測。
付属のSDKで、距離の計測結果も取得可能です。
<本体取り付け時外観> <システム構成>
計測画像の長時間記録 (RoboVision2s 2台接続時)
付属のSDKにより、画像のサイズ・フレーム・レートなどを指定して保存可能。
外付けSSDを用いることで、長時間の計測が行えます。(2TBのSSDで約4時間の計測)
Page2
付属ソフトウェア
標準SDK (視差画像取得・WDR機能等)
SDKでは視差画像の取得機能によりカメラ前方のピクセルごとの距
離情報の取得やワイドダイナミックレンジ(WDR)の機能を活用すること
により、夜間の対向車のライトなど強い光源に対し、画像が白とびして
しまう状況に対しても、異なる露出レベルの画像を組み合わせ対象物
の輪郭を鮮明に表示させる機能を搭載。
<左:WDR機能オン時の画像 右:通常時の画像>
物体検出ライブラリ (オプション)
物体検出ライブラリでは視差画像に加えて、カメラ位置を基点
とした物体の検出を行えます。検出した物体は、取得画像に四角 左上:左カメラ画像
い枠として表示され現在検出している対象が視覚的に認識可能 左下:視差画像
なGUIを備えています。 右:平面図(トップビュー)
また、計測した物体の大きさや位置情報もデータとして取得可
能で、自動運転制御時の周辺認識や車両前方の環境認識にご
利用可能です。 <物体検出オプションのGUIイメージ>
Car Trackパッケージ (オプション)
検出した対象物に対し
ID、距離、相対速度を
本製品は、前走車を検出し距離を計測し、検出結果をCAN形式
CAN形式で出力。
で出力を行うシステムとなっております。路面の傾きの影響を抑 付属ビューワーでは、
え前走車の検出と追跡をする新アルゴリズム(VTS:Virtual Tilt 後処理機能として計測画像を
Stereo ※特許申請済み)を搭載しております。ADAS・自動運転技 使ってグリッドマップ上に
術制御におけるカメラを用いた前走車の検出と追跡するアルゴリ 検出物のプロットも可能です
ズムを兼ね備えたソフトウェアが付属されております。
<Car TrackパッケージのGUIイメージ ※画面は開発中のものです >
仕様 (RoboVision2s本体) 価格
カテゴリ 項目 仕様 ◆ RoboVision2s 本体 :90万円(税別)
カメラモジュール イメージセンサ ソニー製カメラ向け1/3型有効127万画素
CMOSイメージセンサ IMX224×2 ◆RoboVision2s 物体検出パッケージ:180万円(税別)
<セット内容>
解像度 1280×960ピクセル(30fps)
・RoboVision2s本体
640×480ピクセル (120fps)
・物体検出オプション
水平画角 45° ・セット用PC
インタフェース USB3.0(UVC) ・SDK
基線長 210mm
サイズ、重量 W270.8mm×D109mm×H50mm ◆ RoboVision2s CarTrackパッケージ:180万円(税別)
約730g(本体のみ)
<セット内容>
材質 外装:ABS 取付金具:アルミ(一部除く) ・RoboVision 2s本体
定格消費電力 5V 900mA ・CarTrackオプション
・セット用PC
温度範囲 0~50℃ 結露無きこと
・SDK
機能 AGC/AE
WDR
◆ RoboVision2s SSD パッケージ:140万円(税別)
同期、ひずみ補正、ステレオ平行化、
ワイドダイナミックレンジなど <セット内容>
・RoboVision 2s本体
ソフトウェア ライブラリ カメラI/F、視差画像生成
開発環境(SDK) ・セット用PC
アプリケーション RAW出力、ひずみ補正結果出力、 ・ポータブルSSD(2TB)
視差画像出力*、物体検出機能* (*=オプションソフト)
・SDK
動作環境 Windows7/Window8/Linux
(物体検出機能はLinux版での提供となります。)
3D CAD Sponsor from 2001
株 式 会 社 Z M P w w w . z m p . c o . j p 18A
〒 1 1 2 - 0 0 0 2 東京都文京区小石川 5 - 4 1 - 1 0 住友不動産小石川 ビ ル
T E L 0 3 - 5 8 4 4 - 6 2 1 0 F A X 0 3 - 5 8 0 2 - 6 9 0 8 i n f o @ z m p . c o . j p
※製品の画像、仕様は予告なく変更される場合がございます。「RoboCar」「ロボカー」は株式会社ゼットエムピーの登録商標です。