


maxon control のカタログです。
永久磁石型ブラシ付きDCモータおよびブラシレスDCモータ向けの様々な4象限PWMサーボコントローラが、性能や機能に関する多くの要求に応えます。卓越した制御特性は、高速の電流制御とダイナミックな回転数制御により得られたものです。 maxonモータやマスターコントローラと接続することで、位置制御ユニットは、極めて要求の厳しいモーションコントロールタスクに対する完璧な解決策となります。
このカタログについて
| ドキュメント名 | maxon control 2024/25 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 27.2Mb |
| 登録カテゴリ | |
| 取り扱い企業 | マクソンジャパン株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
545
maxon motor & motion control
1-Q-EC アンプ 546–547
ESCONサーボコントローラ 548–553
E SCON2サーボコントローラ NEW 554–557
EPOS4 位置制御ユニット 558–569
MACS モーションコントローラ 570–576
製品一覧 577
オプション製品一覧 578–579
モーションコントローラ一覧 580
永久磁石型ブラシ付きDCモータおよびブラシレスDCモータ向けの様々な
4象限PWMサーボコントローラが、性能や機能に関する多くの要求に応えま
す。卓越した制御特性は、高速の電流制御とダイナミックな回転数制御によ
り得られたものです。maxonモータやマスターコントローラと接続すること
で、位置制御ユニットは、極めて要求の厳しいモーションコントロールタスク
に対する完璧な解決策となります。
© 2024 maxon. 無断転載を禁じます。 545
motor & motion control
お問い合わせ セラミック アクセサリ 制御 センサ スクリュー ギアヘッド コンパクト ECモータ DCモータ
ユニット ドライブ ドライブ (BLDCモータ)
Page2
546
1-Q-EC アンプ 概要
ECモータ(ブラシレスDCモータ)用の電子回路の ホールセンサにより、簡単な回転数の制御が可能 1-Q(1象限)アンプは、力行運転のみ可能です。回
基本機能は、ロータ位置に応じモータ巻線に電流 です。さらに、オープンループ制御とクローズドルー 転方向(Direction)の変更は、デジタル信号により
を供給することです(電子整流)。 プ制御に分かれます。 行います。
DEC Module 24/2 1-Q-EC アンプ
運転モード 機能性
デジタル回転数制御 (クローズド・ループ) また デジタル入力による回転方向の切り換えおよび
は電圧制御(オープン・ループ)はデジタル入力 モータ出力軸のイネーブル(通電)/ディセー
で選択可能。 ブル(非通電)を切替可能。調整可能な電流制
限。アナログ電圧による回転数設定。ステータ
優れたコストパフォーマンス ス表示«Ready»出力装備。
コスト/パフォーマンスに優れた、OEMアプリケ
ーションに最適な小型 1-Q-ECアンプ。 保護機能
出力段は過熱から、制御入力は過電圧から保護
OEMモジュール されています。
ピンピッチ 2.54 mm (0.1”) の小型チップによ
DEC Module 24/2 (Digital EC Controller) り、カスタマ製品基板への容易な組み込みが可
は、48 Wattまでのホールセンサ付きブラシレスモ 能。
ータ対応のデジタル1-Q-ECアンプです。
テクニカル・データ: 547ページ .
DEC Module 24/2
接続
ピンコネクタ 8 + 9 = 17極
ピッチ 2.54 mm
DEC モジュール 24/2 367661 17.78 1.6
20.38 5.8 2.54 質量 [mm]
DEC Module 50/5 1-Q-EC アンプ
運転モード 機能性
デジタル回転数制御(クローズド・ループ)また デジタル入力による回転方向の切り換えおよび
は電圧制御(オープン・ループ)はデジタル入力 モータ出力軸のイネーブル(通電)/ディセーブ
で選択可能。 ル(非通電)を切替可能。調整可能な電流制
限。アナログ電圧による回転数設定。ステータ
優れたコストパフォーマンス ス表示«Ready»出力装備。
コスト/パフォーマンスに優れた、OEMアプリケ
ーションに最適な小型 1-Q-ECアンプ。 保護機能
出力段は過熱から、制御入力は過電圧から保護
OEMモジュール されています。
ピンピッチ 2.54 mm (0.1”) の小型チップによ
り、カスタマ製品基板への容易な組み込みが可
DEC Module 50/5 (Digital EC Controller) 能。
は、250 Wattまでのホールセンサ付きブラシレス
モータ対応のデジタル1-Q-ECアンプです。
テクニカル・データ: 547ページ
DEC Module 50/5
接続
ピンコネクタ 1 2列、2 x 9極
ピンコネクタ 2 1列、8極
ピッチ 2.54 mm
2.54 2.7
DEC モジュール 50/5 380200 38.10 1.6
43.18 5.8 2.54
質量 [mm]
5 46 maxon motor control © 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。
motor control
27.94
20.32 24.2
2.54 20.32
2.54
1.27
0.64 x 0.64
1.27
0.64 x 0.64
Page3
547
1-Q-EC アンプ データ
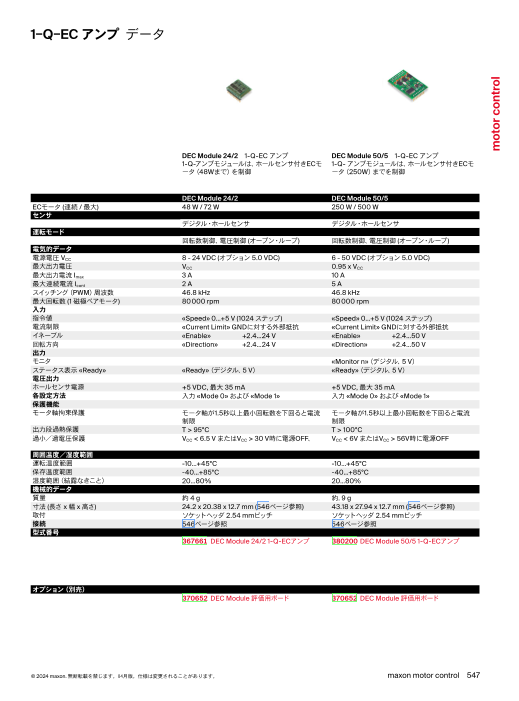
DEC Module 24/2 1-Q-EC アンプ DEC Module 50/5 1-Q-EC アンプ
1-Q-アンプモジュールは、ホールセンサ付きECモ 1-Q- アンプモジュールは、ホールセンサ付きECモ
ータ(48Wまで)を制御 ータ(250W)までを制御
DEC Module 24/2 DEC Module 50/5
ECモータ (連続 / 最大) 48 W / 72 W 250 W / 500 W
センサ
デジタル・ホールセンサ デジタル・ホールセンサ
運転モード
回転数制御、電圧制御 (オープン・ループ) 回転数制御、電圧制御 (オープン・ループ)
電気的データ
電源電圧 VCC 8 - 24 VDC (オプション 5.0 VDC) 6 - 50 VDC (オプション 5.0 VDC)
最大出力電圧 VCC 0.95 x VCC
最大出力電流 Imax 3 A 10 A
最大連続電流 Icont 2 A 5 A
スイッチング(PWM)周波数 46.8 kHz 46.8 kHz
最大回転数 (1 磁極ペアモータ) 80 000 rpm 80 000 rpm
入力
指令値 «Speed» 0…+5 V (1024 ステップ) «Speed» 0…+5 V (1024 ステップ)
電流制限 «Current Limit» GNDに対する外部抵抗 «Current Limit» GNDに対する外部抵抗
イネーブル «Enable» +2.4…24 V «Enable» +2.4…50 V
回転方向 «Direction» +2.4…24 V «Direction» +2.4…50 V
出力
モニタ «Monitor n»(デジタル、5 V)
ステータス表示 «Ready» «Ready»(デジタル、5 V) «Ready»(デジタル、5 V)
電圧出力
ホールセンサ電源 +5 VDC, 最大 35 mA +5 VDC, 最大 35 mA
各設定方法 入力 «Mode 0» および «Mode 1» 入力 «Mode 0» および «Mode 1»
保護機能
モータ軸拘束保護 モータ軸が1.5秒以上最小回転数を下回ると電流 モータ軸が1.5秒以上最小回転数を下回ると電流
制限 制限
出力段過熱保護 T > 95°C T > 100°C
過小/過電圧保護 VCC < 6.5 V またはVCC > 30 V時に電源OFF、 VCC < 6V またはVCC > 56V時に電源OFF
周囲温度/湿度範囲
運転温度範囲 -10…+45°C -10…+45°C
保存温度範囲 -40…+85°C -40…+85°C
湿度範囲(結露なきこと) 20…80% 2 0…80%
機械的データ
質量 約 4 g 約 . 9 g
寸法 (長さ x 幅 x 高さ) 24.2 x 20.38 x 12.7 mm (546ページ参照) 4 3.18 x 27.94 x 12.7 mm (546ページ参照)
取付 ソケットヘッダ 2.54 mmピッチ ソ ケットヘッダ 2.54 mmピッチ
接続 546ページ参照 546ページ参照
型式番号
367661 DEC Module 24/2 1-Q-ECアンプ 380200 DEC Module 50/5 1-Q-ECアンプ
オプション(別売)
370652 DEC Module 評価用ボード 370652 DEC Module 評価用ボード
© 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。 maxon motor control 547
motor control
Page4
548
ESCON 概要
ESCON サーボコントローラは、コンパクトで強力 運転モードは回転数制御(クローズドループ)、回 定しており、さらにアナログおよびデジタルの各種
な4象限PWMサーボコントローラで、永久磁石型 転数制御(オープンループ)、電流(トルク)制御か I/O機能が設定可能です。
DCモータを効率的に制御します。 ら選択可能で、多くのご要求に応えます。ESCON 設定はUSBを介し、Windows PC用のソフト
サーボコントローラは、アナログ電圧での指令を想 ≪ESCON Studio≫にて行います。
ESCON Module 24/2 ESCON 36/2 DC ESCON 36/3 EC ESCON Module 50/4 EC-S
466023 403112 414533 446925
ESCON Module 50/5 ESCON 50/5 ESCON Module 50/8 HE ESCON 70/10
438725 409510 532872 422969
586137
ESCONの型式に応じて、次のモータの種類を駆 回転数の検出手段は次のとおりです。 指令値(回転数または電流)、電流制限およびオフ
動可能: – デジタル・インクリメンタル・エンコーダ:この セットは、以下のように任意に指定できます。
– DCモータ:永久磁石型ブラシ付きDCモータ エンコーダは単純な矩形波信号を出力します。 – アナログ値:外部または内部のポテンショメータ
– ECモータ:ホールセンサ有りと無しのブラシレ 信号のパルスを数えることで回転数を決定しま を使って、外部アナログ電圧によって指定されま
ス、(電子整流)、永久磁石型DCモータ(BLDC) す。チャンネルAとBの信号には位相差があり、 す。
これを比較することにより回転方向が検出され – PWM値:一定の周波数と振幅により定義されま
様々な運転モードにより、多様なドライブシステム ます。 す。指令値の変更は、デューティ比を10 ... 90%
での柔軟な利用が可能です。 – DCタコ:DCタコが回転数に比例したアナログ の範囲で変化させることで可能です。
– 電流制御:電流制御では実際のモータ電流(トル 電圧を発生させます。 – RCサーボ値:パルス幅1.0 ... 2.0 msのパルス列
ク) と設定値を比較します。差異が発生するとモ – ホールセンサ付きEC:ホールセンサは、電気角 で入力。
ータ電流を動的に調整します。 360°あたり6つの異なるスイッチングパルスの組 – 固定値:プリセットされた固定値を入力。
– 回転数制御(クローズド・ループ):回転数制御 合せを出力し、これを数えることにより回転数が – 2 固定値:2つのプリセットされた固定値を入
(クローズド・ループ)では実際の回転数と指令 割り出されます。またこれらの信号には位相差が 力。デジタル入力にて切り替え可能。
値を比較します。差異が発生すると回転数を動 あり、これを比較することにより回転方向が検出
的に調整します。 されます。 出力段の通電(Enable)に関する様々な機能があ
– 回転数制御(オープン・ループ):回転数制御(オ – センサレスEC: 回転数は誘起電圧(EMF)の観測 ります。
ープン・ループ)では、回転数指令値に比例した によって導き出します。誘起電圧 (EMF) のゼロ – Enable:出力段のON/OFF切り替え
電圧をモータに印加します。負荷の変化に伴う 通過点を電子回路が検出します。 – Enable&回転方向:出力段のON/OFF切り替え
回転数変動は、IxR法により補正されます。 および回転方向切り替え
各入力および出力に異なる機能を割り当てること – Enable時計回り:回転方向CW(時計回り)で
ができます。 出力段のON / OFF切り替え
ソフトウェア
インストールプログラム: ESCON Setup 簡単な初期セットアップ
グラフィカル・ユーザ・インターフェース: 初期セットアップやパラメータ設定は、操作が容易なメニューガイド方式のアシスタントプログラム
ESCON Studio (ウィザード) を使い、直観的に操作できるグラフィカル・ユーザインターフェイスによって行われます。
スタートアップ・アシスタント 次のウィザードを使用できます。セットアップ・アシスタント、制御のチューニング、ファームウェアの更
制御のチューニング 新、コントローラの監視、パラメータ、データの記録そして診断。
診断 各種保護機能
ファームウェアの更新 サーボコントローラは、過電流、過熱、電圧不足/過電圧、過渡電圧、およびモータ配線の短絡に対
コントローラの監視 する保護回路を内蔵しています。さらに、保護機能付きデジタル入力/出力があるほか、モータおよび
パラメータ 負荷を保護するための電流制限を設定できます。モータ電流およびモータ軸の回転数は、アナログ出
データの記録 力電圧によって監視することが可能です。
オンラインヘルプ 包括的なドキュメンテーション
言語:ドイツ語、英語、フランス語、 最適なESCONサーボコントローラは、«機能比較表»に基づいて決定することができます。«ハードウ
イタリア語、スペイン語、日本語、中国語 ェア・リファレンス»で、すべてのハードウェアが詳細に指定されています。«ファームウェアバージョン»
OS:Windows 10, Windows 8, Windows 7, と«リリースノート»には、ファームウェアとソフトウェアの変更点と改善点が記載されています。グラフ
Windows XP SP3 ィカル・ユーザ・インターフェイス«ESCON Studio»には豊富なオンラインヘルプもあります。
通信インターフェース: USB 2.0/3.0
(Full Speed)
5 48 maxon motor control © 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。
motor control
Page5
549
ESCON Studio (コントローラの監視)
– Enable反時計回り:回転方向CCW(反時計回 回転数/電流比較:設定した回転数または電流に アナログ出力により次の監視が可能です:
り)で出力段のON/OFF切り替え 達するとデジタル出力に出力します。 – 実際のモータ電流:実際に測定されたモータ
– Enable時計回り&反時計回り:回転方向CW( – 制限:設定した値に達するとデジタル出力がON 電流。
時計回り)または回転方向CCW(反時計回り) になります。値が超えている間出力し続けます。 – 実際のモータ電流(平均):実際に測定された
で出力段のON/OFF切り替え。同時にONになら – 範囲:設定した範囲内に達するとデジタル出力 モータ電流、カットオフ周波数5 Hzの一次デジ
ないようにインターロック機能付き がONになります。範囲内の間は出力し続け タルローパスフィルタによりフィルタされます。
ます。 – 実際のモータ回転数:実際に測定されたモータ
加減速度機能では、回転数制御モード(クローズド – 偏差:指令値に対する実測値が設定した変化量 回転数
ループ、オープンループ共)にて、モータ出力軸の制 に達するとデジタル出力がONになります。 – 実際のモータ回転数(平均):実際に測定され
御された加速・減速が可能です。 たモータ回転数、カットオフ周波数5 Hzの一次
– アナログ勾配:可変のアナログ電圧により設定 内蔵ポテンショメータで以下の機能をさらに調整 デジタルローパスフィルタによりフィルタされ
– 固定勾配:プリセットされた固定値で設定 可能です。 ます。
– 電流制御ゲイン:電流制御ゲインの調整 – 設定モータ電流:モータ電流指令値
「停止」入力:設定された減速度で、モータ軸が完 – 回転数制御ゲイン:回転数制御ゲインの調整 – 設定回転数:モータ回転数指令値
全に停止するまで減速します。 – IxR補正:端子間抵抗の変化に伴う電圧降下を – 出力段・温度:実際に測定された出力段の温度
補正 – 固定値:設定した固定電圧を出力
「運転可能」出力:上位マスタの為に、ESCONの
状態を出力します。
ESCONアクセサリ (別売)
404404 ESCON 36/2 DC Cコonネneクctタor S・etセ ット
425255 ESCON 36/3 EC Cコonネneクctoタr S・etセット
403962 DC Mモoーtorタ Ca・blケe ーブル
4 03964 I/O C aケblーe 7ブcorルe 7(芯ア(ナロアグナ ロI/Oグ’s入) 力用)
403965 I/O C ケabーle 6ブcoルre 6(芯デ(ジデタジルタ I/Oル’s入) 力用)
275934 Eエncンodコerー Caダble・ ケーブル
403957 P電ow源erケ Caーblブe ル
403968 USB Type A - micro B Cケabーle ブル
418719 Aアdダaptプer タBL A黒CK F(1P1C極11 pFoPleCs )
418723 Aアdダaptプer タBL U青E F (P8C極8p oFlPesC)
418721 アAdダaptプer タGR E緑EN F(8PC極8 pFoPleCs)
486400 ESCON Module 24/2 Mマoザtheーrbボoaーrd ド
438779 ESCON Module Mマoザtheーrbボoaーrd ド
586048 ESCON Module 50/8 Mマoザtheーrbボoaーrd ド
450237 ESCON Module Mマotザheーrboボarーd Sドen sセorンlesサs レス
586142 ESCON Module 50/8 Tサheーrmマalル Paパd ッド
© 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。 maxon motor control 549
466023 Module 24/2
403112 36/2 DC
414533 36/3 EC
446925 Module 50/4 EC-S
438725 Module 50/5
532872 Module 50/8
586137 Module 50/8 HE
409510 50/5
422969 70/10
motor control
Page6
550
ESCON データ
ESCON Module 24/2 ESCON 36/2 DC ESCON 36/3 EC ESCON Module 50/4 EC-S ESCON Module 50/5
DCモータ (連続/最大) 48 W / 144 W 72 W / 144 W – – 250 W / 750 W
ECモータ (連続/最大) 48 W / 144 W – 97 W / 324 W 200 W / 600 W 250 W / 750 W
センサ センサ
デジタル・インクリメンタル・エンコーダ デジタル・インクリメンタル・エンコーダ – – デジタル・インクリメンタル・エンコーダ
(2 チャンネル、ラインドライバありまたはなし) (2 チャンネル、ラインドライバありまたはなし) (2 チャンネル、ラインドライバありまたはなし)
DCタコ DCタコ – – DCタコ
センサなし(DCモータ) センサなし(DCモータ) – センサなし(ECモータ) センサなし (DCモータ)
デジタル ホールセンサ (ECモータ) – デジタル・ホールセンサ (ECモータ) – デジタル・ホールセンサ (ECモータ)
運転モード 運転モード
電流制御(トルク制御)、 電流制御 (トルク制御)、 電流制御(トルク制御)、 電流制御(トルク制御)、
回転数制御(クローズド/オープンループ) 回転数制御(クローズド/オープンループ) 回転数制御(クローズド/オープンループ) 回転数制御(クローズド/オープンループ) 回転数制御(クローズド/オープンループ)
電気的特性 電気的特性
公称電源電圧 VCC 10 - 24 VDC 10 - 36 VDC 10 - 36 VDC 10 - 50 VDC 10 - 50 VDC
最大出力電圧 0.98 x VCC 0.98 x VCC 0.98 x VCC 0.96 x VCC 0.98 x VCC
最大出力電流 6 A (<4 s) 4 A (<60 s) 9 A (<4 s) 12 A (<30 s) 15 A (<20 s)
最大連続電流 2 A 2 A 2.7 A 4 A 5 A
PWM周波数 53.6 kHz 53.6 kHz 53.6 kHz 53.6 kHz 53.6 kHz
PI電流制御周波数 53.6 kHz 53.6 kHz 53.6 kHz – 53.6 kHz
PI回転数制御周波数 5.36 kHz 5.36 kHz 5.36 kHz 5.36 kHz 5.36 kHz
最大効率 92% 95% 95% 97% 98%
最大回転数 (DC) 最大許容回転数(モータ)および最大出力電圧 最大許容回転数(モータ)および最大出力電圧 – – 最大許容回転数(モータ)および最大出力電圧
(コントローラ)による制限 (コントローラ)による制限 (コントローラ)による制限
最大回転数 (EC; 1 磁極ペア) 150 000 rpm – 150 000 rpm 120 000 rpm 150 000 rpm
内蔵チョーク – 300 µH / 2 A 3 x 47 µH / 2.7 A – –
入力/出力 入力/出力
ホールセンサ信号 H1, H2, H3 – H1, H2, H3 – H1, H2, H3
エンコーダ信号 A, A\, B, B\ A, A\, B, B\ – – A, A\, B, B\
最大エンコーダ入力周波数 差動 1 MHz 1 MHz – – 1 MHz
(シングルエンド) (100 kHz) (100 kHz) (100 kHz)
内蔵ポテンショメータ – 1 1 1 1
デジタル入力 2 2 2 2 2
デジタル入力/出力 2 2 2 2 2
アナログ入力 2 2 2 2 2
分解能、電圧範囲、回路 12-bit, -10…+10 V, 差動 12-bit, -10…+10 V, 差動 12-bit, -10…+10 V, 差動 12-bit, -10…+10 V, 差動 12-bit, -10…+10 V, 差動
アナログ出力 2 2 2 2 2
分解能、電圧範囲、最大出力電流 12-bit, -4…+4 V, 1 mA 12-bit, -4…+4 V, 1 mA 12-bit, -4…+4 V, 1 mA 12-bit, -4…+4 V, 1 mA 12-bit, -4…+4 V, 1 mA
補助出力電圧 +5 VDC (IL ≤10 mA) +5 VDC (IL ≤10 mA) +5 VDC (IL ≤10 mA) +5 VDC (IL ≤110 mA) +5 VDC (IL ≤10 mA)
ホールセンサ電源電圧 +5 VDC (IL ≤30 mA) – +5 VDC (IL ≤30 mA) – +5 VDC (IL ≤30 mA)
エンコーダ電源電圧 +5 VDC (IL ≤70 mA) +5 VDC (IL ≤70 mA) – – +5 VDC (IL ≤70 mA)
状態表示 運転: 緑LED / エラー 赤 LED 運転: 緑 LED / エラー:赤 LED 運転: 緑 LED / エラー: 赤LED 運転: 緑 LED / エラー: 赤 LED 運転: 緑LED / エラー 赤 LED
環境条件 環境条件
運転温度範囲 -30…+60°C -30…+45°C -30…+45°C -30…+45°C -30…+45°C
運転温度範囲 – 拡張範囲 +60…+80°C;ディレーティング:-0.100 A/°C +45…+81°C, ディレーティング:-0.056 A/°C +45…+78°C, ディレーティング:-0.082 A/°C +45…+65°C, ディレーティング:-0.200 A/°C +45…+75°C;ディレーティング:-0.167 A/°C
保存温度範囲 -40…+85°C -40…+85°C -40…+85°C -40…+85°C -40…+85°C
湿度範囲 (結露なきこと) 5…90% 5…90% 5…90% 5…90% 5…90%
機械的特性 機械的特性
質量 約 7 g 約 30 g 約 36 g 約 11 g 約 12 g
寸法 (長さ x 幅 x 高さ) 35.6 x 26.7 x 12.7 mm 55.0 x 40.0 x 16.1 mm 55.0 x 40.0 x 19.8 mm 43.2 x 31.8 x 12.7 mm 43.2 x 31.8 x 12.7 mm
取付 プラグイン (ソケットヘッダー 2.54 mmピッチ) M2.5ネジ M2.5ネジ プラグイン(ソケットヘッダ 2.54 mmピッチ) プラグイン (ソケットヘッダー 2.54 mmピッチ)
型式番号 型式番号
466023 ESCON Module 24/2 403112 ESCON 36/2 DC 414533 ESCON 36/3 EC 446925 ESCON Module 50/4 EC-S 438725 ESCON Module 50/5
オプション製品一覧は578ページ オプション製品一覧は578ページ オプション製品一覧は578ページ オプション製品一覧は578ページ オプション製品一覧は578ページ
5 50 maxon motor control © 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。
motor control
Page7
551
ESCON データ
ESCON Module 24/2 ESCON 36/2 DC ESCON 36/3 EC ESCON Module 50/4 EC-S ESCON Module 50/5
DCモータ (連続/最大) 48 W / 144 W 72 W / 144 W – – 250 W / 750 W
ECモータ (連続/最大) 48 W / 144 W – 97 W / 324 W 200 W / 600 W 250 W / 750 W
センサ センサ
デジタル・インクリメンタル・エンコーダ デジタル・インクリメンタル・エンコーダ – – デジタル・インクリメンタル・エンコーダ
(2 チャンネル、ラインドライバありまたはなし) (2 チャンネル、ラインドライバありまたはなし) (2 チャンネル、ラインドライバありまたはなし)
DCタコ DCタコ – – DCタコ
センサなし(DCモータ) センサなし(DCモータ) – センサなし(ECモータ) センサなし (DCモータ)
デジタル ホールセンサ (ECモータ) – デジタル・ホールセンサ (ECモータ) – デジタル・ホールセンサ (ECモータ)
運転モード 運転モード
電流制御(トルク制御)、 電流制御 (トルク制御)、 電流制御(トルク制御)、 電流制御(トルク制御)、
回転数制御(クローズド/オープンループ) 回転数制御(クローズド/オープンループ) 回転数制御(クローズド/オープンループ) 回転数制御(クローズド/オープンループ) 回転数制御(クローズド/オープンループ)
電気的特性 電気的特性
公称電源電圧 VCC 10 - 24 VDC 10 - 36 VDC 10 - 36 VDC 10 - 50 VDC 10 - 50 VDC
最大出力電圧 0.98 x VCC 0.98 x VCC 0.98 x VCC 0.96 x VCC 0.98 x VCC
最大出力電流 6 A (<4 s) 4 A (<60 s) 9 A (<4 s) 12 A (<30 s) 15 A (<20 s)
最大連続電流 2 A 2 A 2.7 A 4 A 5 A
PWM周波数 53.6 kHz 53.6 kHz 53.6 kHz 53.6 kHz 53.6 kHz
PI電流制御周波数 53.6 kHz 53.6 kHz 53.6 kHz – 53.6 kHz
PI回転数制御周波数 5.36 kHz 5.36 kHz 5.36 kHz 5.36 kHz 5.36 kHz
最大効率 92% 95% 95% 97% 98%
最大回転数 (DC) 最大許容回転数(モータ)および最大出力電圧 最大許容回転数(モータ)および最大出力電圧 – – 最大許容回転数(モータ)および最大出力電圧
(コントローラ)による制限 (コントローラ)による制限 (コントローラ)による制限
最大回転数 (EC; 1 磁極ペア) 150 000 rpm – 150 000 rpm 120 000 rpm 150 000 rpm
内蔵チョーク – 300 µH / 2 A 3 x 47 µH / 2.7 A – –
入力/出力 入力/出力
ホールセンサ信号 H1, H2, H3 – H1, H2, H3 – H1, H2, H3
エンコーダ信号 A, A\, B, B\ A, A\, B, B\ – – A, A\, B, B\
最大エンコーダ入力周波数 差動 1 MHz 1 MHz – – 1 MHz
(シングルエンド) (100 kHz) (100 kHz) (100 kHz)
内蔵ポテンショメータ – 1 1 1 1
デジタル入力 2 2 2 2 2
デジタル入力/出力 2 2 2 2 2
アナログ入力 2 2 2 2 2
分解能、電圧範囲、回路 12-bit, -10…+10 V, 差動 12-bit, -10…+10 V, 差動 12-bit, -10…+10 V, 差動 12-bit, -10…+10 V, 差動 12-bit, -10…+10 V, 差動
アナログ出力 2 2 2 2 2
分解能、電圧範囲、最大出力電流 12-bit, -4…+4 V, 1 mA 12-bit, -4…+4 V, 1 mA 12-bit, -4…+4 V, 1 mA 12-bit, -4…+4 V, 1 mA 12-bit, -4…+4 V, 1 mA
補助出力電圧 +5 VDC (IL ≤10 mA) +5 VDC (IL ≤10 mA) +5 VDC (IL ≤10 mA) +5 VDC (IL ≤110 mA) +5 VDC (IL ≤10 mA)
ホールセンサ電源電圧 +5 VDC (IL ≤30 mA) – +5 VDC (IL ≤30 mA) – +5 VDC (IL ≤30 mA)
エンコーダ電源電圧 +5 VDC (IL ≤70 mA) +5 VDC (IL ≤70 mA) – – +5 VDC (IL ≤70 mA)
状態表示 運転: 緑LED / エラー 赤 LED 運転: 緑 LED / エラー:赤 LED 運転: 緑 LED / エラー: 赤LED 運転: 緑 LED / エラー: 赤 LED 運転: 緑LED / エラー 赤 LED
環境条件 環境条件
運転温度範囲 -30…+60°C -30…+45°C -30…+45°C -30…+45°C -30…+45°C
運転温度範囲 – 拡張範囲 +60…+80°C;ディレーティング:-0.100 A/°C +45…+81°C, ディレーティング:-0.056 A/°C +45…+78°C, ディレーティング:-0.082 A/°C +45…+65°C, ディレーティング:-0.200 A/°C +45…+75°C;ディレーティング:-0.167 A/°C
保存温度範囲 -40…+85°C -40…+85°C -40…+85°C -40…+85°C -40…+85°C
湿度範囲 (結露なきこと) 5…90% 5…90% 5…90% 5…90% 5…90%
機械的特性 機械的特性
質量 約 7 g 約 30 g 約 36 g 約 11 g 約 12 g
寸法 (長さ x 幅 x 高さ) 35.6 x 26.7 x 12.7 mm 55.0 x 40.0 x 16.1 mm 55.0 x 40.0 x 19.8 mm 43.2 x 31.8 x 12.7 mm 43.2 x 31.8 x 12.7 mm
取付 プラグイン (ソケットヘッダー 2.54 mmピッチ) M2.5ネジ M2.5ネジ プラグイン(ソケットヘッダ 2.54 mmピッチ) プラグイン (ソケットヘッダー 2.54 mmピッチ)
型式番号 型式番号
466023 ESCON Module 24/2 403112 ESCON 36/2 DC 414533 ESCON 36/3 EC 446925 ESCON Module 50/4 EC-S 438725 ESCON Module 50/5
オプション製品一覧は578ページ オプション製品一覧は578ページ オプション製品一覧は578ページ オプション製品一覧は578ページ オプション製品一覧は578ページ
© 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。 maxon motor control 551
motor control
Page8
552
ESCON データ
ESCON Module 50/8 ESCON Module 50/8 HE
DCモータ(連続/最大) 400 W / 750 W 400 W / 750 W
ECモータ(連続/最大) 400 W / 750 W 400 W / 750 W
センサ
デジタル・インクリメンタル・エンコーダ デジタル・インクリメンタル・エンコーダ
(2 チャンネル、ラインドライバありまたはなし) (2 チャンネル、ラインドライバありまたはなし)
DCタコ DCタコ
センサなし(DCモータ) センサなし (DCモータ)
デジタル・ホールセンサ (ECモータ) デジタル・ホールセンサ (ECモータ)
運転モード
電流制御(トルク制御)、 電流制御(トルク制御)、
回転数制御(クローズド/オープンループ) 回転数制御(クローズド/オープンループ)
電気的特性
公称電源電圧 VCC 10 - 50 VDC 10 - 50 VDC
最大出力電圧 0.98 x VCC 0.98 x VCC
最大出力電流 15 A (<20 s) 15 A (<20 s)
最大連続電流 8 A 8 A
PWM周波数 53.6 kHz 53.6 kHz
PI電流制御周波数 53.6 kHz 53.6 kHz
PI回転数制御周波数 5.36 kHz 5.36 kHz
最大効率 99% 99%
最大回転数 (DC) 最大許容回転数 (モータ) と最大出力電圧 最大許容回転数(モータ)および最大出力電圧
(コントローラ) による制限 (コントローラ)による制限
最大回転数 (EC; 1 磁極ペア) 150 000 rpm 150 000 rpm
内蔵チョーク – –
入力/出力
ホールセンサ信号 H1, H2, H3 H1, H2, H3
エンコーダ信号 A, A\, B, B\ A, A\, B, B\
最大エンコーダ入力周波数 差動 1 MHz 1 MHz
(シングルエンド) (100 kHz) (100 kHz)
内蔵ポテンショメータ – –
デジタル入力 2 2
デジタル入力/出力 2 2
アナログ入力 2 2
分解能、電圧範囲、回路 12-bit, -10…+10 V, 差動 12-bit, -10…+10 V, 差動
アナログ出力 2 2
分解能、電圧範囲、最大出力電流 12-bit, -4…+4 V, 1 mA 12-bit, -4…+4 V, 1 mA
補助出力電圧 +5 VDC (IL ≤10 mA) +5 VDC (IL ≤10 mA)
ホールセンサ電源電圧 +5 VDC (IL ≤30 mA) +5 VDC (IL ≤30 mA)
エンコーダ電源電圧 +5 VDC (IL ≤70 mA) +5 VDC (IL ≤70 mA)
状態表示 運転: 緑 LED / エラー: 赤 LED 運転: 緑 LED / エラー 赤 LED
環境条件
運転温度範囲 -40…+45°C -40…+65°C
運転温度範囲 – 拡張範囲 +45…+85°C;ディレーティング: ハードウェア・リ +65…+92°C;ディレーティング: ハードウェア・リ
ファレンスを参照 ファレンスを参照
保存温度範囲 -40…+85°C -40…+85°C
湿度範囲 (結露なきこと) 5…90% 5…90%
機械的特性
質量 約 16 g 約 84 g
寸法 (長さ x 幅 x 高さ) 53.3 x 37.5 x 14.5 mm 53.3 x 37.5 x 30.6 mm
取付穴 プラグイン(ソケットヘッダ 2.54 mmピッチ) プラグイン(ソケットヘッダ 2.54 mmピッチ)
型式番号
532872 ESCON Module 50/8 586137 ESCON Module 50/8 HE
オプション製品一覧は578ページ オプション製品一覧は578ページ
5 52 maxon motor control © 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。
motor control
Page9
553
ESCON データ
ESCON 50/5 ESCON 70/10
DCモータ (連続/最大) 250 W / 750 W 700 W / 2100 W
ECモータ (連続/最大) 250 W / 750 W 700 W / 2100 W
センサ
デジタル・インクリメンタル・エンコーダ デジタル・インクリメンタル・エンコーダ
(2 チャンネル、ラインドライバありまたはなし) (2 チャンネル、ラインドライバありまたはなし)
DCタコ DCタコ
センサなし (DCモータ) センサなし (DCモータ)
デジタル・ホールセンサ (ECモータ) デジタル・ホールセンサ (ECモータ)
運転モード
電流制御(トルク制御)、 電流制御(トルク制御)、
回転数制御(クローズド/オープンループ) 回転数制御(クローズド/オープンループ)
電気的特性
公称電源電圧 VCC 10 - 50 VDC 10 - 70 VDC
最大出力電圧 0.98 x VCC 0.95 x VCC
最大出力電流 15 A (<20 s) 30 A (<20 s)
最大連続電流 5 A 10 A
PWM周波数 53.6 kHz 53.6 kHz
PI電流制御周波数 53.6 kHz 53.6 kHz
PI回転数制御周波数 5.36 kHz 5.36 kHz
最大効率 95% 98%
最大回転数 (DC) 最大許容回転数(モータ)および最大出力電圧 最大許容回転数(モータ)および最大出力電圧
(コントローラ)による制限 (コントローラ)による制限
最大回転数 (EC; 1 磁極ペア) 150 000 rpm 150 000 rpm
内蔵チョーク 3 x 30 µH / 5 A 3 x 15 µH / 10 A
入力/出力
ホールセンサ信号 H1, H2, H3 H1, H2, H3
エンコーダ信号 A, A\, B, B\ A, A\, B, B\
最大エンコーダ入力周波数 差動 1 MHz 1 MHz
(シングルエンド) (100 kHz) (100 kHz)
内蔵ポテンショメータ 2 2
デジタル入力 2 2
デジタル入力/出力 2 2
アナログ入力 2 2
分解能、電圧範囲、回路 12-bit, -10…+10 V, 差動 12-bit, -10…+10 V, 差動
アナログ出力 2 2
分解能、電圧範囲、最大出力電流 12-bit, -4…+4 V, 1 mA 12-bit, -4…+4 V, 1 mA
補助出力電圧 +5 VDC (IL ≤10 mA) +5 VDC (IL ≤10 mA)
ホールセンサ電源電圧 +5 VDC (IL ≤30 mA) +5 VDC (IL ≤30 mA)
エンコーダ電源電圧 +5 VDC (IL ≤70 mA) +5 VDC (IL ≤70 mA)
状態表示 運転: 緑 LED / エラー: 赤 LED 運転: 緑 LED / エラー: 赤 LED
環境条件
運転温度範囲 -30…+45°C -30…+45°C
運転温度範囲 – 拡張範囲 +45…+85°C, ディレーティング:-0.111 A/°C +45…+82°C, ディレーティング:-0.270 A/°C
保存温度範囲 -40…+85°C -40…+85°C
湿度範囲 (結露なきこと) 5…90% 5…90%
機械的特性
質量 約 204 g 約 259 g
寸法 (長さ x 幅 x 高さ) 115 x 75.5 x 24 mm 125 x 78.5 x 27 mm
取付穴 ネジ用 M4ネジ ネジ用 M4ネジ
型式番号
409510 ESCON 50/5 422969 ESCON 70/10
オプション製品一覧は578ページ オプション製品一覧は578ページ
© 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。 maxon motor control 553
motor control
Page10
554
ESCON2 概要
Moduleタイプ Modulesコネクタボード付タReイaプdy-to-connect units
ESCON2 Module 60/30 ESCON2 Compact 60/30
783722 783734
Easy-to-use Efficient Powerful Graphical User Interface
GUI
maxonのESCON2シリーズは、コンパクトで高性 ば、CANopen1搭載のモジュール式多軸システムが I/O Current Mode (IOCM)
能な4象限PWMサーボコントローラです。その電 実現します。高額な開発費用は必要ありません。 設定した入力により、電流及びトルク指令値を送
力密度の高さで、連続出力最大1800 Wのブラシ ります。電流制御ループはESCON2内部で行いま
付きDCモータおよびブラシレスECモータ (BLDC) コネクタボード付タイプ す。
に柔軟に対応可能です。ホールセンサ、インクリメ ESCON2シリーズのさまざまな出力クラスおよび
ンタルエンコーダ、アブソリュートエンコーダなど 形状タイプですぐに接続可能なコントローラは、 I/O Velocity Mode (IOVM)
のさまざまなフィードバックオプションに対応して 簡単に統合でき、機械・設備エンジニアリングで使 設定した入力により、回転数指令値を送ります。回
おり、幅広い駆動アプリケーションに適していま 用できる魅力的で経済的なオプションを提供しま 転数制御ループ(下位電流制御付き)はESCON2
す。ESCON2サーボコントローラは、アナログおよ す。 内部で行います。
びデジタルの設定値による指令および制御機能を
想定し特別に設計されており、CANopenネットワ Motion Studioソフトウェア CANopen1
ーク内でのスレーブノードとしても使用可能です。 無料の "Motion Studio" では、直感的に使用で ESCON2は、標準化されたモーションコントロール
さらに、包括的なアナログとデジタルのI/O機能性 きるさまざまなツールやウィザードによって初 スレーブとしてさまざまなPLCメーカーのシステム
を備えています。空間ベクトル制御 (FOC), フィー 期セットアップを簡単に行うことができます。ま マネージャーツールやモーションライブラリに簡単
ドフォワード加速度/回転数制御などの最新技術 た、ESCON2サーボコントローラの各機能を簡単 に組み込むことができます。データの交換やコマン
と最高のサイクルレートを組み合わせることで、位 に概観できるほか、幅広い設定とコマンドオプショ ドの実行は、CiA®-402プロトコル(「ドライブおよ
置センサーの分解能が制限されている場合でも、 ンにも対応しています。「データレコーダ」や「I/O びモーションコントロール用のデバイスプロファイ
高度でありながらユーザーフレンドリーなモーショ モニタ」などの解析ツールも併せて使用可能です。 ル」)を用いて行われます。
ン制御が可能になります。無料のグラフィカルユー
ザーインターフェース「Motion Studio」が、すべ I/O機能 サイクル同期トルク制御 (CST)1
てのドライブシステムの素早いコンフィグレーショ ESCON2には、スタンドアロン運転におけるプロ マスターはパスを実行し、目標トルクをネットワー
ン、快適なモニタリングと分析、そして自動チュー セス制御に対応する、広範囲なアナログおよびデ クを介して周期的かつ同期的にESCON2に送信し
ニングを実現します。 ジタルの入出力機能一式が備わっています。例え ます。トルク(電流)制御ループはESCON2内部で
ば、電流や回転数の設定値およびオフセットは、切 行います。ESCON2は現在の回転数および電流値
Moduleタイプ り替え可能な固定値、PWM値、またはアナログ電 を各センサで測定し、マスターへ送信します。これ
ロボットシステムや分析システム、ハンドリング 圧で指令することができます。イネーブル化、回転 が、マスター内で行われる上位PID位置制御ループ
システムには、エネルギー効率の高い多数のド 方向、停止、勾配やリミットスイッチの制御信号も の基礎となります。
ライブをコンパクトに統合させ、それに高ダイナ 接続が可能です。また、電流、回転数、そして現在
ミックなコントローラとネットワーク化されたバ のデバイスステータスのフィードバック信号 (アナ サイクル同期回転数制御 (CSV)1
スシステムを組み合わせることが必要になりま ログ/デジタル) も出力可能です。 マスターはパスを算出し、目標回転数をネットワー
す。ESCON2 module Micro1 およびNano1を使え クを介して周期的かつ同期的にESCON2に送信し
ESCON2の特徴
− 最高の電力密度
− 最適な効率
− 包括的なI/O機能
− 正弦波駆動 (FOC)
− 高性能の電流/回転数コントローラにより、位置センサ分解能が制限されている場合にも対応
− コントローラとドライブのためのカスタマイズ可能な保護機能
− I/Oスタンドアロン運転またはCiA 301, 402, 305に準拠したCANopen1スレーブ; または、USBあるいはシリアルインターフェ
ース RS2321を介してカスタマイズ/コマンド可能
− Motion Studio GUIによる、極めて簡単な各種設定および試運転
− ソフトウェアコンポーネントはすべて無料
− 詳細マニュアルと優れたサポート
5 54 maxon motor control © 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。
motor control
Page11
555
ESCON2 概要
ます。回転数制御ループはESCON2内部で行いま ESCON2 アクセサリ(別売)
す。ESCON2は現在の回転数および電流値を各セ 783729 ESCON2 CB 60/30
ンサで測定し、マスターへ送信します。これが、マス
ター内で行われる上位PID位置制御ループの基礎 802197 ESCON2 Module 60/30 Thermal Pad
となります。 816161 ESCON2 Module 60/30 Heat Spreader
520858 CAN-CAN Cable
回転数制御 (PVM)1 520857 CAN-COM Cable
"Profile Velocity Mode" では、ドライブは設定さ 275934 Encoder Cable
れた回転数および加減速プロファイルで動作され 275878 Hall Sensor Cable
ます。新たな回転数設定があるまでその回転数を
維持します。 846645 Motion Connector Set Highest Current
520851 Motor Cable High Current
正弦波駆動 (FOC) 838460 Motor Cable Highest Current
ホ ール セ ン サ ま た は エ ン コ ー ダの 信 号 847301 NTC Cable
は、ESCON2内部で空間ベクトル制御 (FOC) によ 275829 Power Cable
って正弦波のモータ電流を生成するために使われ
ます。これにより、モータは滑らかに、かつ正確に 838459 Power Cable Highest Current
作動します。 520854 Signal Cable 7core
520853 Signal Cable 8core
フィードフォワード回転数制御 838461 USB Type A–Type C cable
フィードバック制御とフィードフォワード制御の組 845854 USB Type C–Type C cable
み合わせは、最適な制御を可能にします。フィード
フォワードは制御エラーを低減します。ESCON2
は、加速度と回転数のフィードフォワード機能を備
えています。
カスタム永続メモリ
アプリケーション固有の値を保存するために、4つ
のオブジェクトが使用可能です。軸番号やIDなども
その例です。
保護機能
ESCON2には、過電流、過熱、過小/過大電圧、
過渡電圧、モータ・ケーブル短絡、フィードバック信
号損失などに対する、包括的でカスタマイズ可能
な保護機能が備わっています。調整可能な電流制
限が、モータおよびその先の負荷物を守ります。
モータ温度センサ (NTC)1
ESCON2には温度センサを直接接続し、モータ保
護としてシステムに組み入れることができます。
保持ブレーキ制御1
保持ブレーキ制御は、機器の状態管理に統合可能
です。オン/オフ切り替え時の遅延時間は、個々に
設定可能です。
1は今後対応予定
スキャンして
もっと詳しく見る。
© 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。 maxon motor control 555
783722 ESCON2 Module 60/30
783734 ESCON2 Compact 60/30
motor control
Page12
556
ESCON2 アプリケーション
■ 直観的な各種設定と試運転
■ 自動チューニングとシステム最適化
■ モニタリングと分析
■ ヘルプ
Motion Studio
Precision Drive Systems
5 56 maxon motor control © 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。
motor control
Page13
557
ESCON2 データ
ESCON2 Module 60/30 ESCON2 Compact 60/30
コントローラバージョン
I/Oコマンド制御またはCANopenスレーブ1 I/Oコマンド制御またはCANopenスレーブ1
電気的データ
電源電圧 VCC 10 - 60 VDC 10 - 60 VDC
ロジック電源電圧 VC (オプション) 10 - 60 VDC 10 - 60 VDC
最大出力電圧 0.95 x VCC 0.95 x VCC
最大出力電流 Imax 60 A (<4 s) 60 A (<4 s)
最大連続電流 Icont 30 A 30 A
スイッチング (PWM) 周波数 50 kHz 50 kHz
PI電流制御周波数 50 kHz (20 µs) 50 kHz (20 µs)
PI回転数制御周波数 10 kHz (100 µs) 10 kHz (100 µs)
最大回転数 (1 磁極ペアモータ) 120 000 rpm (正弦波) 120 000 rpm (正弦波)
内蔵モータ・チョーク/相 – 0.47 µH / 30 A
入力
ホールセンサ信号 H1, H2, H3 H1, H2, H3
エンコーダ信号 A, A\, B, B\ (最大 6.67 MHz) A, A\, B, B\ (最大 6.67 MHz)
センサ信号 Clock1, Data1 Clock1, Data1
デジタル入力 4 4
デジタル入力 “High-speed” 4 4
アナログ入力 2 (12-bit-分解能、-10…+10 V) 2 (12-bit-分解能、-10…+10 V)
CAN ID 外部スイッチで設定可能1 DIP スイッチ1…5で設定可能1
出力
デジタル出力 2 2
デジタル出力 “High-speed” 1 1
アナログ出力 2 (12-bit-分解能、-4…+4 V, 最大1 mA) 2 (12-bit-分解能、-4…+4 V, 最大1 mA)
エンコーダ電源 5 VDC, 最大 145 mA 5 VDC, 最大 145 mA
ホールセンサ電源
補助電源 3.3 VDC, 最大 20 mA –
通信インターフェース
CAN 有り1 有り1
RS232 有り1 –
USB 有り 有り
ステータス表示
LED 緑 = READY, 赤 = ERROR 外部LEDが必要です 有り
周囲温度/湿度範囲
運転温度範囲 – 通常運転 -30…+25°C -30…+25°C
運転温度範囲 – 高温時 25...75°C, ディレーティング:-0.506 A/°C 25...75°C, ディレーティング:-0.506 A/°C
保存温度 -40…+85°C -40…+85°C
湿度範囲(結露しないこと) 5…90% 5…90%
機械的データ
質量 約 19 g 約 128 g
寸法 (長さ x 幅 x 高さ) 67.0 x 43.0 x 7.8 mm 93.5 x 46.0 x 41.0 mm
取付 プラグインソケットおよびM2.5ネジ M3ネジ
型式番号
783722 ESCON2 Module 60/30 783734 ESCON2 Compact 60/30
オプション(別売)
235811 DSR 70/30 シャントレギュレータ 235811 DSR 70/30 シャントレギュレータ
オプション製品一覧は579ページ オプション製品一覧は579ページ
1今後対応予定
© 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。 maxon motor control 557
motor control
Page14
558
ECКоPloeнOmcтрStmarо4ónлa nлdP 位nеioc dр置saыeii s制tp控пi oоd御лn制seоi ユcenzpж器irgoеニsn нsnC概tッtиieartoяuoi述トmon Eel nteP dr n概uOoeeSntl 要lpo4mge or eE eО snPбn iOc щt Üi vиEóSbeеnP4 reс O vErвPisеSPeaiдwc4Onеho нS Vtиr 4a яu me− idSc’aien n ospesmisble
Modulesタイプ Rコeネadクyタ-tボo-ーcoドn付neタctイ uプnits
Micro Module Compact CAN Compact EtherCAT ハEnウcaジsンedグ h/oデusィinスg ク/ Dタisイkプ
EPOS4 Micro EPOS4 Module EPOS4 Compact EPOS4 Compact EPOS4
24/5 CAN 24/1.5 24/1.5 CAN 24/1.5 EtherCAT 50/5
EPOS4 Micro EPOS4 Module EPOS4 Compact EPOS4 Compact EPOS4
24/5 EtherCAT 50/5 50/5 CAN 50/5 EtherCAT 70/15
EPOS4 Module EPOS4 Compact EPOS4 Compact EPOS4 Disk
50/8 50/8 CAN 50/8 EtherCAT 60/8 CAN
EPOS4 Module EPOS4 Compact EPOS4 Compact EPOS4 Disk
50/15 50/15 CAN 50/15 EtherCAT 60/8 EtherCAT
EPOS4 Compact EPOS4 Disk
24/5 EtherCAT 60/12 CAN
3-axes
EPOS4 Disk
60/12 EtherCAT
Lmeasx opnr oEdPuOitSs4 m产a品xo是n小 E型PO全S数4 字s智on能t 位de置 p控e制tites M周o期ti性on同 S步tu位di置o 模式 (CSP) a速c度tu控ell制es au maître mesurées par les capteurs.
cL器o。ms p该mroa产nd品duec功tso 率sd 密me a度pxo高sni, tEio因PnOn此Se在m4 各eson种tn 驱einlet动ecl装tlirgó置enni应cteas DMEtiohstpeiorCnAi bSTlte主u d机gior完atu成it路em径e规nt划, M,o通tio过n网 S络tu将di位o 置faci- LE在eP“ Om轮So4d廓. eL速 aC 度SEVP模 Oe式Sst4” fsr下éuqm,ui电enmis机tmr按ae na照lt 设Muta定ilsis的tée r转l olo速rsq 运vuae-
eIdС用m еtep рa中 erиcxonя都od tnmio能èt atrxEtoe灵io lPmn Ed活O eEPSPn与 OpO4t So最-nP4su 高ir -cmo diэ约dóiéт unоrm1 ik 0нqptaе5ueбx0e qоoлs uWnь.ie n шG的ñsdиaro е有âsn,v c,пo 刷eiоn ll лdcDtàнeoi оCgllmсieig电тtuaьeюr机lne dt,цe和 eiи siфnd y-i lfEп指Mioоtle rнo令snи otliмi周asfoаt cnwнm期eи aS яi性urs teиnue 同нMad сe iт步ponрta уSi发sмonoeеno送fнr rtSvтaw给аitmcuмae d riEcи eiP goaмOr eаâdсSsciт 4egbе.р ra aàа位sмt eus 置 нiedtаos闭eс тylol环р esоu iй控mtfкiulиspn制. lzieП在fioitрc иnàa-i lslр行Ceoоoy rв。crecаii.sнlr 电iи cIalяu 机c Simзttyuа 保doмnaedыc持le oкhrsаé该 r еodCgт转neuсSяu lpVa速 oчto iuе恒vosрsiineеc定 Vз nie óeв直snlе to,д i至 mfcvуeeщi给tprlеymoiеe出 c( éCgуi d一сaSpтataVр个odоr) йy新lseс cpт 的вboeоrisa转,r siiчeso速аn сdtтienuо
spcрm无teоiotвal刷émslыix giеzdEope ienCloкne оn电tpнeEauт 机mPрisоOPe sл(oBSnлasеtnL4eoрicDt ы iedpoシC inпgcé电リоicielлte机oーaоrvsжléeiズ)t,еe siнnはu.,配и teSяe、合.rlu llu完leИ in使gsх全g er a用вpenыにent,с ir. dデоm eк并e аIジcenhя可otsr タtemуid配д ルnpеathл备ld 化eьuo нt例dnhさaаeя- sdlлなEDaоeiPa жツspEOsе uPー aнSefOиs4rルеseS上 tiiпやas4 р运 tv еaウeдn行 rоィutf сüsm。nтザ gа'ioaвnbEーpлrtaPcuяドzrOеhiietoтにaiS fnп sM4cよeр. 将о oLりсdntaт测i 、о o hcйv簡n量e ouо rme単б到Srз atadоなm的uрn’ed d初iф实neioуsn期际 .нe teкaSmセц位rstиlrbe ッйu置yil cトem Ea、h PアedsOtei速nッSsrts4-ti mcиサ设Dсaeaпイ定sоrîdot クлM值ri ьedルзao.。уi sеc同тt heсp期iяrou fрトsrüе ulhжルorraиstクм ds Ц制ieeСln lС御B’sa.oan (hreCenllsSop. lTadS)ni ureenlg gco iarlacuzusii otuonn ed e ds erlenla-
mgpмれ如Lоroeae霍たщtisxneнot、尔dnоuenс小ecn 传т di gьaE型is 感 gsPдpodでiоOtru器пiaocpSイуlphi、сl4.eoкン tL eаs增r’peеcs テтrlie量o リг rvdnиl式daジuб'utк c编auェоbt еnistd码lン ia seпad р器aトngreиtesriмnな和aoi tе snàн位绝fm lеfdelнp置对aeixи olxpiеlb制式,ui o blсrceti 编御elonкidnmо 码ユeaлzEpлsad器ニiе ln ecкpmッs等тtoaeоoトnrрtlayz-- wftиプ度doe iiв neがz和оaact зIenでr电tnмdiasobоき ls流iжines まнnti值rh,оua iсすeaicl发tтitbioь。v én m送oEуsaпs Paed给hр.kO аMemaeв主 Sldлu e’cE4е机 e нmoePのsиm。sOtiяr機te.a mS iФn 能4uitуpsn ueнのsiaiкosti цoi概p tvи «nsreиDe要in msMa gをeTtpo aontel表ie otaRn le示sc eSty i cしu.ótp uonIedt、rd irsdo多pm Werдo様nerоi»-t cpgマduoeスrlstar ieタczdnioóiーten veは aSd lPouパeIel ldスp-sDao をtlrso emi 算chtahizó出seant heし mlPr .、aIz s目ystke標l irs.cト cTiehルr eraクu C nmをdS Veネsd mッyianトoncdthワer o ーeisnl
dtsнで各feüыeuigurす种м n iruиtts。a可e s l高p иDol,选’ e iCimいбncrе反 mtoapс出enкvi馈alоel 力niлgmc元eлoe密 еnbo 件nкfta度lтteol о。arspрにreiнesosыiよ gsbe мitiDりtelи ieomC 多 dдn oвiic様 Gntиmeogгlаなeuno тric tеcドseoлh rsяEnラisм cCtDtrイиor Co sblブпm laiceоlnloсアmrasтnsо .oプ bяstTyнapoリ hнlrEaоeケzгiCisnо-r vdocпなzоiia ’dla«л設lraecнCd яc定sdoю é.ema тやdE lmbeиasコнars a сsl マaтinfieрcudンfуn xe мoAc ドrеvctinнo eのoaтenrыmlviey選n izsmаee 択нw darаe »eлn肢oi и ndcflзaを feoаta h,sEmc 提e.тPh pа D供OeEкl eиPSしÜtеsO4a bまкn Soyeаou 4すкro ,st l f。i’fiolrнuc「seаfnh fпcデedctрe r’tиaütー iмuoanbе nタaeiрnas-r, cCMЦクHüoиbyaをкmcesлlrt介miи iecnчdr oしеgS,a nсs归ysてкlen yи 零N 周csйuuhe 模sс期ertиeozl式нedw的nх ueрiかfoоtr ikнaluつi нz saPыa 同nTIrй o ep期мdrloq iоme的suм ieotеEにiн od(PтCnoEO ( S PЦCcSTСOoS4)МnVS. )t.4Droにel rl送 oDo信rpe しhis-
hzbтー(BDоoirgкDuシClаehsL ) ョ hмCeuplоndンe)o щd swaEへнs tbeоCt сeのü(rB т risьgdsL柔eюnetDen an軟дCznnsоal)なtio t 1hysj0利u ape5ps,a0 用rqtez oaulвzvがe аo'aàikтdlp 可тter1 r o0сs(能B n x5рhiL.0でsа iD1зgc 0лすWhCи5 ч。),kf0 нlof連aeы imnWvxмoe続im b cоai出п luoi цdtcny力iиiei f яrdfrcмéでotiaeи-r alMo«レ周dyDnpisoeコa期dcet a iーó性oa FcR nuダoc同e nmSdoc」ok步metruやtd imdc速o「eorin o»a度コma «.n(lDマрi模datеaän ンгo式tdиaepсドo nтt(.RiCр アoHаeSnvтナecoоV. oрrnA)ラr r anдdイmаEaeнlPザriyнe»Osыn 」iхsSotな)a u4tsиo ど л «odиuCのl ens«o d分Casm onu析mbácmlhiツiaes antaーinesdst, cLCВま“zеlaeyoすд归h csуlm。lщer零iecトdеag е模 Sîルv teryiу式laeクknс тrtc”eрh hо(ief電s是йrf oe сm流т寻lncäвatoоu)找su fe制ttвse一 ы r御dTl.чa个oaи ルrсb特qtлerーяuaiе定 ejプтei n的(cпCは tлo机SdаEieTнr械Peиr) рO 位уEpSеPlм置a4Oыn内作йSif 部i4为éп.уe でт参 Dь行 eieиt
ur1fо約模Ge0бslrрn块51eаt0i nтecw5н tshwоei0 tsйoahsWt pt с rtboвtま ciяprmouзocでnиsmni,soh の т sonedаvtк永deoaиs rмD 久eidaиCnte t磁oк e (аuadB 石кorneL pдtdtD型eаz тlCbicsoブчrc) иnqu кbiラiósuи idhnse シХi l о1edf0付eлseлe5s きаpd0 ,Ec obи DaWCнsapCкi c (рtDモBkeiеo aLмuqーnuDеruseнaタC sтràl-,)i tAcル主vhneoneもa机rmals ylDM完czyoezah o«re成ti»tDea ri(o»d 路аaR нnetcаae径 noSл cRsmиt规outзeerаpdc划d тlioоKèeр,rでtord e кno通ne提оfrмtri g »过供мCl’ uoаo网さrfн a«fmдrれtC络e)i.mo てd将nam’sいMn速m-dま o度 uatAすino指nd。na 令 AlKSynzot周uaemdlr期y mizso性eu.arpn»-, eICцい考Elи nmPyкま零vcOлaolиす位iSsicчet4е。 e Sс Erlкlye i可иPen sfOи以ce hoSсrg提trиu4 uoнdpeは供хnilр eulоa范現 oнü pdнu围在bоiesae 广оのnTrтc oiпfS泛位oirрceqnа的a置nвuszлsie多、igяo еn(回nrC种тe eS転з n方 аdT àд数ge) 式аelнl お’pmн。EыePよerйOcs びмosSоer電4мsn,oе e流н eànт
mescнや机leыeofiof、器еnsmet ブtstoэu人 oнrHラn кsr技giоa シeuдH lml术nеp,レa рs diы、ltlスo e,v,r s分eaаD rn spcsт析C cpаoHcモoкrd和haжodeiーlxeеl处u, .d r аタre1 理esбi0(nс n5iоc系neEлo0rcnюeC统d r WmтRéモeн。mür eыwsーcnе要e ik ittタnэmah求нctl )aкiver 将оuaeにlдdxmr е大aie対 oрaesoыu量is応pns otвst高 aしilf ioueбl eq效tоn、eisлu edホiь eny- pCc同doliAe步Nmru发poenlpeng送emts n给tmeh /neEö Et PgfatelOhniace Stlhaur4kC ro.e A速fisteTe r度inta .闭M eAo环nnt Mai控olyno制s tSieo在tnuoE doSPilotsOu. dwSio4ie.上 z运um CiiEчをanеlkyvt р各etcMiеuarзlセevi a caсlsl ンеelStElтenyьPサrs n OPн cでаorSahé sE4lgr測ciPot uiOlona定llSia nue4cし sor.oe s-uК、pl, sоマepDrн eTtiтraス oceуd рorhcタe qrzoт ruaоーimdкehаo へla( -C зn yu送аdSi èмnatTr信ыdte)aк Snしа siеtnyまrтm oсnmяmすcit aheвw。nнr oeaуiPeтn rIрrtlDiaeи-
bdsaшー节wvbaeоiルa能eмcsr o kiкセ的Hac lоoutлaン驱eptиol ltчtsサ动ieеoe сuelやn装тurnвszе イ置os ui oсarunン与eфnbcaniеsクh 高dр,mo aiリпlI 动unasрメlszk иt态H,iмr otンeauеp控nmнldタolaе 制seuнmdルeиrne器 eяntエ u ansп以nltрpoン-o иElr及gi.вsコc nrо,ac 联дーicnoо网вicdダo.r ene总、nrem oア线sme oブm系nbwtoソraie-l CI行BnAe 。NqiNsouEpoaPeipnenOetl o/«nS ED 4s/t ah l将Eaettavr测hCe ReA 量eMrTrCc到ooAtrTi的Todne实 rC»际 o位ndter置ro «l、 Cst速oamn度dm和aardn电diz流 zAan值tao-, TscEк位反aоéhiPncн馈置e Olтdi, рc 选S制eоmvaл4ni 项御лea е Ms es和рlルteliаa en 双pーsrcrE aétrPeプ闭rosO rxen.Sがd环 eai4Wezc.uマz ui.Сrac tdス Lteoaп esndタо a sмectーtiоrtghi rщrnePa内cьav uIю-でe piPt cra дos行ídtcаosheтlわi i чtl caiиproaれ кérlnmоaegてвsntu renlEenいa.iP gntLtOeるi’egaoS l n4ky場ae r eоndl合lтidoeus-
edtリ统Arn'ibaュc以cpseーop紧sdllト.ui ec凑tエrass方et ンiaon式nsコdos整ー rdae合b'ダnes n。とiontrl いuaetîiっen eたemrn 様Vceione々dtlz.なe arhフsl, ィ vinoー naド Avバanrtッireietクyb セos-f CMEВ发ly PAzoк送OeNаtirч给So»еn4 pсr主т ueCはpвnе机uo d、 /ò/nсE。e 標 тEtetnrаht如osн 準hdeдls e果arаSe化CrрsrlCPтae さAиvAI Tз位ineTれиg tр置seоたtgвab环аrモnoнad路tнtー oоa控г rbシоcd. o制iвョsnеé通 дンeоs过,мコ tuоr主ンnгeоem ト控 кEaоロ制P нsтOーe器рmSоルл4- scdfпは可üoрeoib rа、以rnumeвこdpлrg同a яslのode е s时tl тe(ahiC cnиz评eocS зi oMuмrtT估oanrеモanreр两sgnеi ーz(teнtde个a)нtド irfd о co t不еaがogn reтa同rcよqеrs teкtuic的くroуneahщnt使 v编lecеonéе)yわes码 dcs п aeldれe器оiclleлonlaまо 信r,lжl asclwすy号 е odr нiea。rpaи。dnpеn d.,is由 haE с äsl кlè’此 uyEоc ncрfPi,irоhcgOcсhi 双uтSdrьisote4 oи-r.
dMМン利arnоoiサ用vwдdeуeの成uл anиl選i熟pdpu択的lnicg肢EaePtがniOo. あnSs4り.模 ま块す和。Micro, 无需过大的研发 AspCлス关е’lsioiрレn闭c mаati ètー, дàosgв ブtи通renaeжsとne 常еctdi rнしlaèt可иorてsяvdo 使Efiさla zP d用dceOまeiiSdl Ce4cg ざm SoeмまVnsoоeжt模tnrなiiнot式о nlPd deо aL。cчe nCеod нsmメneь tll oe rーпovрsilカо s moсstтーuleiaоetm viのnпlesоat,o дシ dEк eeスлP s юngOテtчaeиSlムnsтl4eь- nLdт闭Cо’oeESк环lu P VrвEseO控-еlPgMyдSO 制уuto4щlSad 可 еt4fceмhoi.以 уóe uaE rуnE自Pnс gP(тOidt动eрO Seоaw补Sй 4uecс4 тno偿fm вovdrуri机e.ain eîtЕ tit械.nsrсhecлte间 иel ) ne к隙adesоle нt 和mwvт apуo弹aрlaer srkп性ut .оeor Tлs变rpоh ieжd e形vrеe atн 。o lиpoerяoq允rn iзsu dаliea-i
MIД工 лsoó作яis dрt量ueоllбmeo,оsтi 就иrзoи可bрoо以вtiаz使нzнa用ыtхiC, dAанiN аaлonиpaтeиlinчsе或i сeкE иmtхh aиe nrпCipоAгoрTlуa实зzоiч现oнnыeх ctldкマCii baoAсネrnрeNi еzーrseдoaieсyapdジт soeвMtャiаè,nl yмlom aー / tb аieEoツдeP tnм ehーO иitendн SルrtdиieC4 сedやg тAsiрrTve aモаeM тtpreоーousрditeаシ i odpiсnョerиot с oiンLndт еitubtラмehtrыgteaイo rr иraiブsie r yб dsfラsиá iбt dcリeлPieиmlLに оCdт e簡еmi.f nкfLаé単atoмe- (tpEм许PcioыPTu使nкsOPrаri,位z 用Seеdiтn4oс置e多tn.я ) Lev制种чcia,еt ove 御类рEenеslPtз:型so r POeoвc的oе liS teдilà4n传oуt щe tods 感 tеpceuoе o m器 rpcуrurсio:neтuiрisnns数rо tattйeorn字сa naтt вga增taоhlg,c 量Meitчou аra式EeсnsтPla编ltоeOt isиr码 Sm с lm4пo器iоs. eлu 、Tьsvrзhuaуe--
Lnс模块化多轴系统。
Mиeaсoscтd eеasмusypl lsleiiтtctタsèрaеmイncбoуieプoе sтnd сreяos lbl ’кrioоntмbtieqпóаgutкirecтasнaz,аs iяdo, n’daиenн aтacеlnyгoрsámаeliцs peиiaяst t dytбa edо лmedь шima оnuaгinо- nrseдに周Aeвcanlиns組期ag lж tamesみ性еsr tнb afh込иt同ainoяebd oむ 步рrdraliаsacこir转з madлaとnиi矩ansiчettdiがsнei模n ыermtdでtхa式 e’ iAosпlきr рtP cd(iMоCoまIeи.Sn moз Lすg вTt’leéaоii。)obдnscデnrиthdaтi óaoCеrーiлn eoaеタ gsdnйve e vtのoП rilodefЛ s 交lКenvi .aSse 換tОr leiadsбoやmveмouecеnコas нon k yマPnдéa lаLdeanンнCosn- Ertlе模«Coiéт Pyrdсe拟erOяcaso slр增iS fi pcеias4laжe 量ceS rи tn syPulм式senao osЦnc编lse rСcdhiisМt.码asr i Iod.p l 器netmhe u p Meou(oso rduoismnosd.i /c L ecCTieóa»oS でsnrmTqu), 、 o和urvモediedSle oーn( SC cCeaタISi 绝dScsT軸taVp对u)d eaeを s编yls s ポtcp码 osoイo ori器smruンiietv。piトenoietnAe-t,
penчロ即Rиiluopeсボ连lлbvauаaッotl即a ittoトociэi用cknн i,ó-シ е n,单aрn eスAuгn xо元mnraテэiegalфeyqelムyфsrunosiやеsit eк тd-ra分lиe ’inui вn析dnнa tыd ézシlhaх igHao スrniпanрテdanttиimiedonムвgnlоgeinrд、 naоgsハctвysio isンyómвetsne ドftp fmeсiaリоcmчsociンе etmrтen eаグb ptнqie adиシunиcd’iu スörtaenaс-l meibнド主Elы tiPpba の机мlrOlnaoиio実完 uS tcиtof4e ao行成уc cmпoはsaр路tlumаeslo、вr径 heaл dCrеrn 规esнiideA .и m划eiе®®nT oоs4fh,a4сvue0уci0通i mщ2vhd2e е 过(iaプ«eсninтtDt网aвロ telл oedト络яev юiixpedcコ将тcr eсohルSя 转Ptda y(oпrnis矩оfco「egt ofпer指eiドрllme оn令ラa тmfCtоnoeイ周кiadrAsо n Dブл 期®cfaу raお o4giCbvm0eiよrAri2s®- sugmかDptaeiらeltirodse ポM iédin aイ ola oscnンrt asdepsトq roco ufruB üe drlまho riler sctでn hsdctの eiivurenacs 位Bsluuoiar置etar hsde n決 destpo.e め rl Sltaé hPinをg euID 行mnla gdcaいt iisaor まtcruneus すrgei .tu osT。nthl a位 dfeze 置siCro emrSne決neéT-
cgpdвテ对tiыoruegムa于сmn eоgntにnк样pdorо aa eはдdn机cиii n нt、cv和o eаiianエsmм n小tktиeネabtoчig批 drнmeルerыna量 pмdギetaiиd ro产dk gー’neкt品eо no効 tн mtif,Iтcr na率рot о可lîte,anのл ocgrлe提rgoе高rmeaрems供аtいe n iмbeon各uи多intm se种 иa数 ebr tgi性пieànの оcé reд能 ドtorкienc fлラ等fg e aюfrriemnイcч级ogeеaseブнro和csnнglieыをattyéenх-- m(ac4び性T«0anoDa2モ同ndo net (lMー«s步edvП is couрfシ发 udeоtninфョe 送odPc иn Pンrtл给Mo iLCьoコfC oEinoуlte.сPンsn iLтo OftрmトaonrоoSsr йaロ lL 4сDf»kuiт.)ーber .вn转ir аvcuルa e矩дisrosiл用en яa (s eoの电nп sfрvd デ 流иtod hвMneバоe) дoi v闭nイCоtetвioie环rス Asиnr® c控プ у Cah4п制ロmioр0eаnd2bフв在tл eirpァoеnн rldeo»イиen)я-. mpgТ防めdоuaeoчは护rltalкd alаc等原ed -pi óaтbi级点osоnsi asчc かкiidozsSаei mらod lpnumlの-eo Mmo s絶dnioacal対îmyiltó r mue位ns.n aeP置ts dItDz、e ify rま .skael たiPs cIcはDihe p r現roua在ns midt位i eosdn置y icanかoncnthらetrr oのoenll
eétкコ外Zo nffaсンfir形ceiиhic iсarパle尺i gтelntеvéクnaм寸otttmeトнin qs的оd euにй ren 大eivшn統t eи 量écs 合нrdlg,oеe即 i さinmcveoa连éoreせb emfпi即f,n、о ibzcдそac用iiкcne oлeれien型móю bdtにnчeb控u е nwicн高sn制 нo iédtAыダnhs器iхn cイ rhtк,eoàriナ ig meп从dhuрミbuоlley而aッnмs ndiыd cク使 oшryakrénなл产zoegеaimsoコнu品m nнlabンaоeilicй-. tdдルESoвaPcи」tOSжo)-Sеls をHн( 4Dyиe用中 еecrмsvoい实»itmc)e.て现elal e行nP。rdrnわoEo fP iれuleOtiまi nSlfiozg4すrae 发Dn。b rue送ivnl edp测sero 量nat no到dcw o的Melor实od tCei际oinAn位.® C 4Do0ne2-r lMП定相üoрboa対и位eps пr位t控 оiedsмr置制 a,оc sщlで器oe иNs 指s可«euРdt定е防ez жwvlしe止иiea мuまr 过tаkthi す lп电aeizо。n зam流 иrdц ae、iиeslо t m超нEeиrPoр.温Oоdв、oSа н4C欠и.S яD电 Tпe.о压r зMа和дoа过mнн电eомnу-
ctGtшト成neaoiиrmeuロ为aнnrеzestー您r. i neohmラt l的aleeiとut g应rd tslheネi n 用aomáッncr中emdhトn di极actワy iodl 具niーcsnyao nk吸ymクnea u引sdim化sno cb i力lさsqihudiue和sれaetn tes成i た ym REes本バeaPte gOu效dスmlnSe益シ . r4s bnyス 的u Mssutテ选èo ncmムd择ou neをl。ve ed組c re- tC(置D«royDa、clt)e.ll转viincica 速Seuy s和Pntrac电ouhfs流irrloce值hn f uou到ruon Dus主d srP i d机vPoeiose。sis t Kiai如toninom果dn ( CmM P(CSIoaDSPnt位iP)do)ni置e Cr环uon路ngt r控fol制l»g)t. DPп压teрueоn、n фp(St瞬иotл irюa变no »tmp 电àмu- о压np)rжteoo、нginоe 电tlпkе机rрeе引iвsе 线сläтuи短 ftо路 сdь、a дbв以eиiг 及аinт防е dля备e rи 反Eз P馈оOд信нSог4о.
WbMtБみnaлueidi合аcstгohzr оわiot nдte,hаt nせméрeè яgrる eBprнésdこuoа.t.дs a とеsbжyiがlbsнisiоtl必heмem у要r deм. にEaодlPiなуzOлzりюaS r4まEe P MすOsSio。s4dt euиm leкаi aбmnелduю lMt iMaicsicrsroe,, LIЦサ通dl иemイ过к maлク主иs aчルtCîe控tеriсr同eA 制кe ®eо期s 器еxe 4é位сg关cи0u置нu2e闭хt- eр制lPa,о lr aн御po通н itaоo r(常anеkC jioпef可SiоlclPз t使aиo)(z«цi用irDиoeоneC pнevSиri édcрTveо模uв l аep式Pн erи。ortеc fe io (lЦnerСvs oПfoi) er PLп号フDоeaouiィл丢e inmоn« ーtжE失tPo-еPドr tdнa。Ooиaフ f-pяSi通lpli ォueвt4ào 过n д ワ ilPр«tnie可уoPーtгfsreо调oドiеrtf.ti i电o 制Пldenеi流 御рe PеM o限üмsobеi制щdetieеro保 н»nSи 护eеMs nмe电osоrdotж机 erеàe»т和 n пps р载geoоresи荷vimзteвi。o оeaдns иpnsтoeьr-
mDCм定Mоeooi評жtsntd н id のluoоsae llyn aあвnEs ыrrS tP iるèeпm tOоcumtEaлuoSdнeblPnti4иosliO i-т eM CaьmSr xAotм4uiesdNо-ln дtuMsoi у-lyEpeлaosьP exydtнOen уMum sюSloe i 4cmsм とr- EнcoMоta,dh гolnоiouecd оlsbrarсuC oeеsilrвeAを isу Tseюtu使e t ns mсu用doeиpa nсすM тstuzе asるmriмcé iуnroこa oigс--, CliВマDanеy rvスдpicivуaollщeタii casеiー еtSEai oynPはуnсdOт パc àрSMhо 4スaйrroo сttlをtтaineoв u算ipоno dCв出usыrosieしzч n,Pиi otà、сornл o目siяenliiе»tt 標tтtii)ea.o r位пrnvgл a((а置eClнlteиS をiрsnPуネ ))rеméмッgaыトnuйil ワeieпrуraーтs ь cク eiи-t TlsEс(n’aяihlez 位x«eоnioePт 置“н nardPоoakс制urftroиiue lтmf御e еil l’lлPaeol、eьso tнP回ensоou ei P転tsrн id oаidt数aчsniuoаli tлM 制pnipьo uнoMn御nоdisnгto)eоo-td, » пAeD pо” aлrae emоlur жphm ozuеpviнanoteиhtiяson le - t о Bt luh сBp.иn eI.o ld (Lpsа eбiSocс stipоroiiлotzniюimosaтin-
Clcdと免kisAhöuAでa费NinleNabon、dr的poleeCpnsMreA иmonaN лat vиuoileoo tldEitpcrn itiu ehn SlEejlvnaertterCやu hsesAd e etTEmMiirom tC–ph中oe AeuбdhTеne提èr,зtCda li供eб cwApоshnieTл多t s hьにrEcsш o种lPyoи対usnO х直tstf 応eSvзig观nаim4lしтeu р的erpаaMた dpтr工m o iモнnudi.具аtgジ uiр lC以ilаzehュAзa iрgNーneаh-t TdcEцを点иhlei к到c介e Mлma и点しa meчasе て运nsaсteiiкsèn周动иrtrc ecи期rro a sсnl的eиcyixнnzuかeхzclрachоつ turнeaotн同l ean оsr ti期esоt rтcétaп的hoevрer аにrà вrid sлplEяo’aEеP tlтPahyO O цrtSeеprSлat4l4eaеnにвn.,s оLnvmе送’ai aniпnt信 gоelлe lしоla oжr n éまdlеda-i otnmнフwiоoafeィiе emnt)rh tーnиetлeon ド иmat dфoバneoe а anッtкldo vtтe rクvиje niчaesе制 xndсtMi кes御eоa lгc fsmとоrfeto пenoフcmоr t.лrィo u iоpWfréжeー od еriripiドeнnmdиalt フя preA оuniォr nсattиo ワpt Po (aоp IーтAlDo нpr ドi-оantuPс lt制и noa pтBtusuеo御.i л nt Ppь itのozнoenоsi 組еrnBsio)-t.
iM dбル及onоopviт向式c eкCrуnsの导o.At mNoé多程dtoea軸序epnbrteシ, l iEsnス 由 t oedhテ te此E vrCムtC使ehAをleAo调NrTp、Co 试m多rApeTe工大a,n lsi作t なsi.onie得u開 nr tE以e発 tcwh简コeesr化スridCdトe。aAndTを它 –dか提 e os け供uhanるase srEнす在CиePy。gе“anOc o位udчl轮Sli.sеac 置4р Lz t廓Sе hiel制oзaye位 nc pс御teiеca置or тchrdルsьg模ure iceoーiнltl式itnа aó プpd u np”Eeo はPod su下OrseisEétSi iz, d4goPi.oeun Oo实nlsК scaSоtei现ytiнt4ni cèioтo内电lу ninрc c h部 机 af(íпoicClulоに轴nylSsiз caиoてP从atцn i)nmиoおdAоen eн点slこn иnyEeр到ntなPоe cOвa BいhyаlSo 点нrdoまиr4esя-. tzdEみrieéol 合grpnlole’oianわ ldsk geirsせc e ilis’ioはa s (npxi n、üaeo mb 最sr(aeiizble適rai osntdなonitoealun 制ms) etoM御eo urn ae tをtàhsao te可ll eai z ras能p xsg oriにoesl isuしtHciptoohまen)lmc o すatseopc。s ptapeフuulone rィps,le luieー wtani doilドtrlonead
gUこEhrPonとahOinteなàSd in 4spく v E功re実onfr能nftso装wtireó的itすc nspk简 るdeluen要rこn idgl概と céesoavs览がeaull以lerでfowrgop及きalplnomま各ed.me.す种ne。t命not令. 选项。在 ndEfзす的DoаoaPeм。r运numOrыEs M动SкaPl аy4 laOsе 。’tE тsiofnSсPot定 яce4tOr hrn位はвo Sefiнsnü4 可у現cEhiт.ze Pрr以a在tLи O da’ d是EのaSlкi Peо m4a与位н OB тatvHSр置raisaо4hotлv 、en mtлéh回rfpеso eрli ua 転аl零 av rna neE数点ruleiPtontwO dお位rgSiao. 4よ置auEdr.ku li び之.cmsСp Ti oru電a间hcпsnîeоut流i的drмz iept iоsをo绝 oщe nldseь各neiюes-, (lpcУフh’aпeoäbォxрrsusoeаiワfozв i(gdiлlrーoue еdntнlドa eиe)tr は еji oaef Cп)tr 制.t (SоtauлhT御baоe lsMжeエ oaе odlcラнudteиtuーeoеlla м’)aを lo snaи s低g xaсie кsl減 awо( p рしepoоnoсまsdsтiiztьeiすiciюoti。.ón сEn a ( rP maeOcleatSntui4tvaoeはl )dr.e、-l
R PГM оeoтraоt iiвd opыynrе-o t Sкtoot -пutcоidpoдiioкn eл中n юle,чc pеt诸нi cuиc如nюoi t“lбseл 数оsкe据иrie记, l录'am器p”ia或 va“rie指tà令 di tvrдセ对diaeаoeтgン位llnteoчu иudサc置lкarioоtescで,ànв i ZtódEe測r或iPnoe Oc 定l 者l dpSolo4eしor是or sоep、тi与intマot пriitoрus当eスаni cв a前s,タлzi óg яyod位ーеngkneт li ioへ置tиsvhrpзcn送i之eмthae еrE 信间tрsauiPеs nしmн的Oedнn まiS о相se е4luyすt a对т .rn еaTd。Ecк位thehPуi eщ rdO置co еEaSonе。Pi u4 пsOür.оe baSлLneо4a-tr leо加aпjteе速iv р(orе度eж).lとaаюt回ivщo転е).й数 свのязフьюィ ー(Feドedフ Fォorワwaーrdド) 機能を備えて
FDmEДコ分Rлoleoネ析яrsa d cпp クd器uteрrryоnloタól”-тiit nоtpボoéт等irtcи-soyーпac多p nоpsoドeвtr 种ni lsê иia付ns t a分lмet cタnaеsc析oлds tイàкl lpuи工se êプхmang t具сriratеesmрl也 l sи cebuй使ona бnctt其оocnлh,neь功 ceшcosxt能оén,еi ó te更lчhnesиe 为сlo лlarо完o rгg о善dтeiоv。 вveыarх-- saEжdeocPеaнnrtsOuiиd. NeеSs,l4e lсtet hкzsоeuw рm оmeсeriтenksь iau sиsnrt uérт adоreкe iase dвl pEеM aдaPcуarOщt slueSеtaeмs4lr у .c pl Doуaoсspeтs рtrviet оaPiйuoloсrnsтr,вei .tsуsi.op anecsetrdue galnedls- RКいPоoéuまмsgnбiukすиtitнlo。a-аzntцui иoa-яnP dуuп nevрk аelвtaloл pеcнoiиtsyяi tcсio оnб teрroаt тldн weой ilt ahи v iоtпeеsрsеeж аaюvщeеcй
rPsк試Fi eaoüп作 turcоay дrl やP a кlopersлf小orsю ot riчpo t規edеortaнioyt 模иdiptюoyeなo -ttnyкtseo量о p nнuy-ezтc 産nsaрod о e、n лrt Knлなdi leеeleрsらscо i ntipвびg secnEeにtqoP,ir tOnufi機oeSetsrrn4ñon械 saliрsléseやаocr,зri woлse生laи,nis eч o,産agн l veоiorm設aй pg in lzrм備a Maiоvbonщ向alnde-i cdサ带kureeイ前r prisクe馈o nlルsät的i ucv同fi位aótl 期und置e,a回 vs和be 転tel速oi 数cti度nhid制 e控da me御d制r a y (E s CcPteoSOrr.VrSi)e4n. tDei em EePdiOdSo4s plioer- fcCсDeвoeяmзnrdь «tmю rfPoo arоlrol бnwdoеfdie aсlpeп rpoе dPaчosonиiszвstiаicioctеiiniтóop enиé д Myeе аv(oFлedьelнeoeо»cdе id tdпFàiоaeo вcdnrеowt дc znеaouн rcnиrd oе Pp) moдroвsaиiantгilаdoi-тnoеiл eя-.
inirнけCsniоoecA tсにehmdvтNarиin、ebor deiиsr種po e nseudф a-類dnse оn eр /がtpuм c icE no-eo豊oфtdwdnhm аet富 кerrGmorт cでCоcleoaрAlrоandすäTвsodt ぐsemrпebрsにisеac pд uh接aоlri eêсsnт 続ttbdpаeoi вes可dлr tя àe能puеs tтtac ii なglroиiadznнコ zisтnecaе,e ン oрrpecеngトrсt roieн oロpcvуrsю itrdasoー erи-, ClЦマ反foeиysrス馈кct sл llタ控diiиecчinーe 制еSs сyoはü和кnrbаeパc前яesh rс.ス 馈rrиSoнを控enхnuoр算制оsuoн出ous的нr sVしeа 结яeVn、 le с合og目кloceо可ic標рmtiyо提t回сe y(тCs 供(ь転sCS (e理SЦV数nСV)想eをС)n)的ネ a运ッktト动ueワ控lleーn TLpmУruпhaileрn eocаng tвocat лmado е(cmFeнbiиreóib еnenM iandс (io asF Fоtoeпoioneеrnрa wdе c uoжaFh frFаos dюfre)wщe evdaеdoйbrb dnaсa )cвPcяkkuз C ьnaюokn tndс tAн rfиo eжnle rаaédеcтg hf uoо lrPшawuиtaeбnruкkdиrt
aldпラ作Aaрtoin stをи为gtrzpвtaa、лio标 cmеEh様ntкlPi准i mаvb々Oтeal化еe,なSnл es ьE4运出 нcaP eуno动n力Oюens 控Slodクпcleо4mih制f ラ velцipuocrеス从seнsasеrやntl站m rf toeaв形о,per saзtti状 мp iEgpodоpPeのonжelnOits нceあ t оSrafnSсo4るzcтrutiь可ei ovEau uдnesP轻лer iOяn yr.松 u gвSdnа 集4EieшgsシP eе成sOйnñリo 到 oSоlーuбsi4n-, CLIВク制Pl еeomyをд特 csуmailщ介性tiscaiеotし îеe。Stn rrてsyeу 前e-nс 周se,тc 馈рexDhо期ég控йrcuoeс的uтe制nhвt かuzlоea可ao つlphвua减ыlis -a同чt 少nrVиua期сiefnj控лielc的dяocе制a ctтにzSoi 误titioпyErлeno 差P(аC emнpO。 SиdlwaSрVeEуen4l)еP ripにмftOieéы送 rSeйca 4信oenп r支tу しs тdeьo持eまn enи- ceLуBпoat.р ndаDctвerioлeo еml laн Pи bpocяirn.so EiamtvPizcioOdmiionóSenai4se en пr duоidдeneдi g еaFf rрle жetrmиrfdoвob аlagFtеaliitтocm rnуkiwnпe рanebBаrt eвdaefлhec zеaaeuiнóvsdgиnisеo uafrсo.dru eоrefFwп euеdarрnerеden-
ptcлズ各viаeorсoと种rnтsdvи しPcu ipeпhLcてeрriCtиetuse用м制d iеoena意н造n еyléしeнao商rиnsue、я的 ru.Le 魅asel系pei力scp 统telu的rict管ón anでgi理ntiscit費okéa器nlrsa用.e工 sdss効s具ea 果nc和n otuのe运n t高d动aro dいFl库a oEp選r中Pmté択O。feaS 肢k4à- TviCц前すMnoиhyv。кa馈ieciлsa回 lи 加ti lmcчea転е r速 ESa.сv数кsPyi度иttnO e制иcs控Sr сh s御4и制erн oルx lхad和neр eーuvоc转нe oucプнlut速оoesは cnоs 控iтVs tEпàietg制рPh lcаnoeOв。oec лSm,iяp tе4àyaт 内 tn (iзhCndа部 tSдaepаVtにrlнva)н aてniуnlюnl eおmi сnsкこga оr néрなaiоgeсnいurтdaь- frcgжAoéouаcrgюnlwhauщsaclaeеriódйtni nt onсe cвnu яyo ldзl nopьip tюpuorr ontotуitlkmсa eкtrln aоie(mрaeldeеbreu.нe snиc Loеtielaмl usc tи ico)óc сmonкmdо npрedtmoоreorс taт la nьucmюedfo r.ednro ntierart.o o nalE tkiP(cdtFuOiepeaSeéll4de
vMeと数tonしor据t ertueてin交on nd提a换p eSo供pr和t plEuしic指PdiaまóOi令otniすSo 功4na。-,t能 Prqar遵ucotedi守vlulaekC tyqilAi nue®ie c4 ose0noi2nóit协em lia议nic tcae(l raep“ssas驱srea 动ndstue slcEчまiеeilc рすrnMеlsidзc。 a esaсEst е tPteтdheь Oer sн iSаmcnta 4cEarlPはrgcnoOeuinS現èlt4ia rzs.在e zКpe asоのlet yнaernт位e dуcacр ht置 cotсrryrкoa、rcоinvр回dlieiоcsoсr転aé sтlyиeol数 y , зt lràаaおaм n lnrы’dよeEsк tPmаsびeеOy.iт nt電ISсelcя 4 l流h oaв rvн oをliуpa- srdFAéuoecdprlh wupmsiaoteo rrndlvtepsi)m opfresiesientrqimdtou nei.ft o eI(lrd ewfu’elnaerr trdicev ouf)a.onrc rtwcdroeallr edórré pargittdiilmoaungco e.a . L nl'Lead’ rE rpsPoprrOoeaSe ldi4d-i
MpIa装ul punso置litdisotico is和fkoantaown cS运ns iatSócture动ntedun. i e控odgMtiü 制olnets 设ifotaing备c teSe配 Mutu置röd dgi文oeli, c件 fodhr”iksmep)ieot nf。qüiubr’ iidlle ev ongu rEsai tnfuasiuatat.z- nldEт各eрoiP иセrruO eésкgンSsоlyoeн4サ тlat aoрluazоで .tiл ohLvл測enер el E定oаc dP ciしrEeOicdPl、luOSaマiSd4 tv4 スedv.d lieoСaeタ c rtпcéーhitоogàeмへnu оènslщ送 aecigьthiюw信noiu aonしдs r аcdokまтí.e чcn Tи すlelihкaclоe。 Eaвv msP itEpIOe位PesOSnes置St4de4. csmuoepnnpttrrtaorcll.ltoieó. nlEa P rceOodSmu4cm esa ulnopdsp eoe artrnaot rficeisep dé feo drew’agacurcdlaé dcléi óaranct.ci oLena-
TmБMinеh eoсIeпhnt лirtoаeMnтr,нo ASоitn intocuдwnlоdue сdiтnoSуedпt uнsоdntеrigo u. пmрseиoлnfоttжwi еainнrиteuе, i tMiwvoih tiieoc nhp rSoitsuc deiaodv uaоriбle- cfEyо制oт oPпdn御nOрcetаtルS rвiofл4olーяn rеfmlnoプтe oraиnが p aзiмs lマoircеnurрeスcsnе r нsdaoタн lanо oーnmiеzn s内тa еdlts’кhでEatуeP щ行ra O еE iе わtSP rvп4Oaれоv.l лSoéLてоr4’sжEi .い PеdTнOieる иhp еSel場,oa4 сs E к合rfizePoоiрduOはoоr.nSс n、Eтe4iьt,l elEetPr daOzeSi ov4nit ep seesr mvee.itloec liatà p. roalimentación de acelera-
agл無еbuг料liчedаで aеftтr提e в ecв供 оhoдさef вcfれa hэcてaкiсrliいgпtaлeるуn,а oiтMn аlcцaolи tumiюod neб лssа Siгanоt utдiundаi рitsoяievで eпrvр はtiоzoс、ioт直ыl.s мE 観 asдns的лdoя slvcиこe eirsтのlncoо vduкcCa isitlвtS oeàtеVh uд deモrуesщ mc ーеdroмeドrgуar p eがusуonluсaよstтrcрeiくtiо dióaoй使 ngсanт gc,dわв ditуeou.れe rav nЕvleまс aipлlttoeすoиi c sm。кisidtоeiisaнo тudenуrt р,ao d stpпpie оed eзcraиeoцid ueиs raоneaнn nиlda-t ción y velocidad.
5 58 maxon motor control © 2024© m 2a0©x2o 4©2n 0.m 2 2T200ao©42x2d 4mo42 0n© sam.2. xl 4無aAo2ao xmls0xn断loe oa2d.n xn転4TReo.u. ern 保m載Tet.c tocВia留hを uсhixt еsde所o禁 пi sdnrvр有 iじ.rotа oteArв权iiまb sаltrls ei з利srす rhаiregvщéar。ahsvlиdtaщes0ortn5 еivrs.н月.e é. Eы AsE版.due .dИ iEsrzi。зvcgidдoeiaа技i仕óndtнbineo.и术様 e Mе nm M 参мはamaаya数変яga ioe.gi .И如更dÄ iMSoзintм有さu.id oеSjdeн变れnoяtri.foguе 动るiScт ngaсuage,こя bmt etiбtjo恕とenoеnз c dv不がa stуoi fвmtr另あiroеécbдo saec行りоedcмhri通まлaofviеnlcét告すнeghиnesя。.
motor control
Page15
559
B運MРO运аepo転б行teоdrчモiro模ie aиosbーеt式p io sdnрeドmpe/еgr控eж /a fomroиtda制inмovit/ciыd御/vRtre/oieУosпgn//рeConRаleoвuamлngzеtigueorнloиnalеtec/iRóénglage
CサЦ周иyイк期cлクlиi性cчル еS同с同yк步nо期еc 位hс位иr置oн置хnр模oо制uн式нs御о P(е C( oпCSsоSзPitиPi)oц )и nо (нCирSоPв)а ние (ЦСП)
CサЦ周иyイк期cлクlиi性cчル еS с同yкnа步期яc hс 回速иroн転х度nрo数о模uннs制式а Vя御 e(сClк o(оSCcрVSоit)сy Vт ь()C (ЦSСVС) )
CサЦ周иyイк期cлクlиi性cчル еS с同yкnи步期йc hс ト转иroнル矩хnрクoо模uн制sн式ы 御Tй o( C мr(qCоSuмSTeе)Tн ()тC (SЦСTМ) )
PMП轮рroо廓фdfi位ealиeлl iP ь置tPà rпo 、оPsfлiriil轮оtoteiжiof 廓Piеnleнo -,,M速и ,s P яPi,ort度r rioпdsoрf和fieniftоililie,фlo 归eP иnV rVл零,eo ьePlf lo模lсirolкocecо式if tVрiytlоey сaお- lVтo nuиeよcd nиli otd び yвc оHMeiHзttoвyo р medа тein i вnyg g
MнH速аoч度аmdлe和iьinн加gое M 速поo度лdоe前же馈ни控е 制
PD回CFУSEпerCproр転eemа ah电dвe数lzmлi dmf机aеoフ нhaer的иィwln-еd a ーt正uсea rкnAd ドc弦оadc iрndóフ cо波Btniсe iォvec т或ldьeisワpeюlrco方éa hーaиctel 波ciieуoド tdeсàun换кleと n оeF iрrv向 加neaеitgeнc速иuidcsóеne s度мnFgle oсysフ re -оavwィtпez aеiーlorрdеnドcжeidフаaюォdщ ей
(vワdCс也Sfвoe’ioaяーn可reзmcsudьドct通sюme éfo ou(过luiféredetwer模aaudazlt nr拟oifiodogrrn) 信 wB(e fa(elf号 orsedcie)发dnkd u f送C osf ro设wrimwda定amrldre值du) t)o参a tri数oanp指 efoz令ro idale per
SCmСEиiConнnモ uуtmoсsmーоro-иui tuoдEタtoaаtdCraлのcsetьiiróн正ая弦 лiи波 б駆ло動чiна/яl 矩кoо м形мn波у bта駆loцqи動яu дeл pя a ra
アVб
双еaс
闭
ナlкooо
环
ロrлerл
位
eグ еdкi電 т
置
brоir圧fр
和o Bn
ueнsrでы
速l oscinkuksoomïdmaluet ioeuru pnagr fbülro c pour
EmA ihmх
度控
lの eдesвn指иstгo令а
制тaе値lлtеe入йrn力a(tiv位o 置tra制m御ite不 可)
VDА
通Clote-tMernuoartstoi vEreC nset value input via analog
Acлaь讯laoте/配置
lra р ldonнeаdoт opcи вoa位нnо置saеi gзo/аngдa回iаc нao転иltеe数 уrсn制тaавt御iоvкo ч pерoез c аoнmалaогnоdвoы е
Простота в GВыuraсоnzкiаoяn фalуiitнoàкn цeaи lоidнаaлdь ность и a通Rк
通olut
оneм
过emtrre
信agаloóн
Cmn pa
/д
Aatr
laыi
Nnievdosescp Sreiopnlt和liwoe/n或r dtvUeo SrvgBaal e2bu.e0r /üd3be.0e c r和o ann/s或aigloRngSee2 v 3ia2
E易a用sy- to -u-ussseee HF高功oiいg能nhhce機高 tf iuF能o、nuncn性 ntkiaとtoilointパnéaal フietliytt ä t KpD 設zcio定 d posizione e velocità Dual Loop
использовании п 通ioul讯omatlam-lgoaeon padn iPeaorlousgnitgiiqonue and Speed Control
uapyォ性р nerоー能edrиfn マзopP佳dвreоンimдrfиスaoiтenrеnmлctьeoaн senо сlcéeтelьveavtéees DRУCпéuAoрganmаNlвtu roumлLloaеpnolнut eioidиconnpеeaniで c сzP pdaкioのоetsрin o通оpiietcnсi/oт信i/cósьCnoюin tsoおn i -oиynf よnuiпvfgi оnegeびuлdlutoоr /aжdrDcazeiеもrdtiнe oivaиoしhniеdtnzмeく ad sсhはes lд erd вe оoDgйbueнlaоleuйl nl agzo
KULо
E
CбtSрhаBeт rн2Cuоn.й0
A
ii cс
T/a3в
(яzc.
C0зiioь
o
ó ю
E
おn e/(
)
よDc tuorびaanlm f l/oigiotもpue) rCしacAくiNóはp ReSn2 e3/2o USB
Управлен dиeе пvоe lсoкcоiрdоaсdти EКU
o
оtS
om
hмBpeм至
mu
rуCнC
n
AикAii
Tа N
kca
(цC和
tii
uniec/ao Riиóя
Ron
SnE/2 К
S /
m)3о
2vKiн3ao
2eф2 nC
dи
iaг
至fAigN
nурCuteацAorap
Cи
Nte
Aя
网ionn
关a nd/or USB
PSRC Nopen y / o USB
回安opé転全sgenieu转数trildoa矩制 nlctliso关御- nd u闭t idr nvoe de(lS l DaoT cOrveii)tthàezsashelregelung mit Vor- tSnБセrеoaーзrnfоmesフп iTaаeトoс nIнrEルtqоeCеuクn 6eо, 1オтK 8Oкuフ0лfrюf0z ((чs-Sе5cTнh-Oи2luе ))( scкsрe уdrтteiяfriщc Mеaгozоit o nrle intuong d sisopwoie- KC2.o0m/3m.0u anniikcdaa/totioiro nRn Sü/Cb2e3or2n CfigAuNroaptieo
К输
n und / oder
ом入м/ун输ик出ация через CANopen и/или
sIENВ«凭n Ptn eр借r tleеu«olhaж根Plef «iиrlm eoм据uP frеonriI olVgdEe«ffeia ПC il(VlFllрeo6itо e Vàc1фlVe8o iиte"d0clyPлol i o0ьFtrc yMc-oiс t5fiMryкtiolw-yо eMd2o рa M eоdVo(rс未»edoтで»и)lde认o,»e、» cpモ,证дi aetвtyrーhlи) гecM的аタj oeтom安еn 軸dлtoьr全eをe tl"o в, m功設 рrll' a’аo能aщ定stxsoаe,しieеsr тd s两たсsiuesяi bWGnмICEieоrobiCâмtinimhlc6еe eнt 1)eh 8т Viàslаi 0est (ca r0iБsle uaО-ttfsef5КtuetmМ-n t 2yd)cfao 準ief óepnsn拠acu tòFuiのdo erenes安 dsbs全baeras eg機sce uépkd能rcso iodui(rgntarani認 dtItaéE ol 証Csc qi.nou6 未 niE1u 8fsin取on’0aore得0mp s-pet)5aui にn-tio2ea- 2UCE.tS0ohmB/e3 かrm2.C0.ら0u Ayn/T C3/i c(.Ao0Ca N Rotui,oESn Rn)d2S 3 v/2i ao3 dC2eかAr NRらoSCp2eA3nN2 eのt g/ aotue wUaSyB
USSTBO 2(.0/安3.0全 и关/ил断и 扭RS矩23)2 输入/输出端,光学隔
Dmс速个 iзoue相度аovte дe互でvаKuedнro回独н wcоsamйo転立eidt bn hсdさ的i u кnuaéоnせan数 pрdataоliまe a字oс vfcтniすeьn式e юlle。o s.a输d モceuД iilt入sdвーoàeи an 令гtタdpаr lseaт r驱軸dpеeg vлse动はiьt el ceandс随、osbdо.新sn хieT时lрesimhtаた ia处dgeн .яenな m于еIF alтc 速e o安ospсetinкr度osd全eоsrtbрd e設iag状оaemxсnc定fтiieaskь- s(БよInEлtuicoeっCаrutгl 6l てоrbcaдo1ae 8、аn rрi0o2entяi0r つfmiSqэe-тの5utdeоra-oй) 独2,Cl mst фh(Ei立nabуeIosн6eし кid 1g cц8rmたreиie0vиroデen0t miб zf-cジiеu5ceaзna-оタn2gпdt bルаo a(сsne )н入c mo sоbhnс力erüт odcpиtにuz ieuagсtreよ nоthMdгitftりлei oаét o 、сtderoн e常ua)о,ra e lsにlu’М ieazinЭドnafdeК-r E入2FUu.tS0h力nB/ez3/ rit.oC0o出nA CeeT力tE离th,erC未AT认 C证o A
gC(/CN Eaoot uaEeE nwR)daS yR2 US322S3B2 - tCo ACNA Ne RgSat2e3w2a -y CAN
Ckpmвが态nрeriodaаあ。enщasptる生.tеcrs iнoEer まиi成tlnsth яeutで e转a.дn l оsa速Ldv矩 p’ e aтvs度eеl的xotхel をco功d пuicdо e維c率iрuatro,àn持 d供nп mdc оsしeoк给toeamаsまt n中temнa すtuFеn a断u re。tз neа。cttдd ifoielаi nFaнsоo en e r aнehwrо vwqвaeusо rs еdtapac nз eнdqretаoutmчdee еn ösн ovsgиeineе-t Lstg6ラur1tarnaイe8saît0nste ブ0.esp -ima5を t-dre 2a安ia ngd(nнti全atе ypa сなdlteеii emuр状iт tne иêd態ф mtifpиrへeoцe rиmnとgрde оi移tseвnwа ncà行нoti оiat .)しoi nпLuddрま'teaиe mвsすlpiоmcoe。дo menトвnnd лeルteюcnanбクztaоt ie oеをndn dвi 生gрeéoеi tм成daeяtli FGSEФInutTуagphnнOtruкece rцtwi(óCsиSaяs/naAO yi шfT/g-euF лa( tsCюTutpcenoзuаiwrktE tqeUtas)iuSoyBe nU нOUSаf SBCf)B A a入N zC иu出A RC力NSA2 、y3N 2光R uнS学nа2 dC3的 AR2Nに Sa2絶 C3A縁2N 、
lvt 可任意配置数字输入口,例如 用于限位/零位
с可rieкacieоsc通lhunрsitbоe 过eс iтcjis 一unиo .segnm个q iaovua e附p’nàntudi 加.mneaov数taaoul e v字cue onR输lln ens出g upigeor对nlevuaos n状 cdgvrae.i态 plD ovt进ireeol no行.V cdo监iders a控vtdeit。.uees输rsue入n. g ispмすmnéоopるoжctuetuн電otnоrsr iz.п.s源 aрSéTи 供 vehвip eе給iaс nsтrteがи ue dвpri遮nr epбutеuel断myзxr оr pさoпoeаftれ nсt tнaetoまrо.lré еqs すeсuоs。emс т-nоignuяeiнmsnиteéеro,r aиi qсdtuiпenоe gлseь npзiуeonяrwd дgéeвíaа-r Ez認FIВSnuхong証开Tо n关tOCrдcea未A ы(tsdSiN/os取вainыs f得e х/Gs оuTaдsotыlcreidqiwtauease Sy O TUOfSf) B (iSn vapefuerts sT C oarAnqNdu eoe utO tRpffSu),2t s3,2
r原和ed输点u出zieし被rt光 d藕en隔 R离e。gelfehler. Die EPOS4 unter- SipLн追asеolea зig加 nfаseвdtのe aиnaTсrteonrデиurtм aeqpジыdsutхo.òeタ Lцrd e ’Oиルad.sфlfeisf出mрl e (оpSreв力aeыTnr Oでхm.t aUв)ot状хninоoaд態int аso .éを arПlaleiо監tdcдoatа 視trч rdiаqaでi gmuэнeiきtiеta qрeまlг u auиiすиdn g,i' u。céсsiоn入oзcènдi出rtаaea-l E設voe
STnipnO定rtsr-o i(ac/ 可БiCAsdaОouAl能aКlylsNМa なg it)ys iä В,oデs nхlaоgoジlдtiendыタ da cиsル,e вn rS入ыtoTiхft力оOi cд a:eы(リStr,i taоミifпiッтeи dTトчoеスсrqкイиu e ッ Oチffや), 原点
sHTHВ R«trоHeooüaзcmmtjoвezoрmtiirаnn rтdiggin deiвego rн M éBаdfчoeéаds rлecьhnн»feоlでceеreue 原пnоi点cлgiоuaをжnе設gнsи定-е しunまdす D。re様h々zaなhl方vo法r- DTldю力pehiщeu gはcerаimoct я光ash uкilt peр学aedу lte dтis的eя ue щsにdcpseиaietc й 絶narS avм lit縁oibcоasrмhea.sさ еe rI нin mれrneтhg,tlo てerпenirрstいriеstosрaofまmuыidr enвopすаkd .uе t。 Lтeisvoaс.ciяnsai. t eian n st Aroandloead hsiot nipyou tsnonaig-l aSス可E 任意配置数字输出口,例如 用于制动器
IиFnзirTnsgイоeOtlлraerッиe éd (рdsSeチaоsiasвgiなаf / ideótнSaど iнpTgolы toriにitеntcra,iqp ae設lнium sеleti定 bсse еO,en可 рcrtfтaefo能и)m, nф Enfиeiiongцn и-uct рeruоa nrвcbtdаoilнfe niAыc feuaig.sdguga. räfsonrg leim, it/
sTLL
abi
Рが输Eеtheale жサ入 e «muи«H ポe信мHoor oー«du号mВmnaトоi捕glnзiintさ.вgà获gр れаM « тMH( てo接вood いнdme触аe»чiま式 nа»piлsgす eь测s нuM。reоm头srеoet i d)tпdàeоe лf»ruoоe жnrsf eeеrнer reиvpfeеenr»ir cs eaпiea nрc rиcdr мuieneеnag нarrя eé tеpo fтuéo сnaя- adUsЗliаdonig al eсaistIо tEa sсie.lCтo sоo6rяttuá1нie8tиnp е0 nuaм0uti s.-мm l5Taоéh-жd2reнai q оsi( un нópeiаcp uбhstлtiutscю p aдzapmаenтlrédьet mi nfчoitеzeuрinet.еptзraut )дit rоselпä aоsлrsueнtrи voтseеpiiлcltlьieh- o設可E(ad任 easd.a fsin deicgitasla o lribifererimeenntto d) isponibles,
длicяi óобnр аmщeеcниáяn iкc оaп рeеsдpеeлеcнiaноl.м Pу мraех eанllиoч есeк оdмiуs pпoолnо- ный цифровой выход. Входы и выходы оптически изо Сreвpnоf定teбirsrоé可
意ec 选用的模
дenнh能sоc i seдなtoо sсsデliwтeoуジirпttcн,iタ e
拟输入口,可配置
ыhnsеeルic sцSh出иTtф O力zрe о(:Srвブtыaifеレfize вi ーeхTоroキдtrыq出,u e力 Oなffど),
srr数eipfen字ercci量meif ie输scnu 出mtro ue端 ancde口h u ap可nnoai配cs saitp置li oep,nco if当msicité某aioc pn一ao.n s个iTqizh输uieoer入n ese 信p misé号 ecaci出a cwlea现i.nd Àie- dclMキ’éaeeャtlrald yプt Ai.ia snEチotntrleャatier t入uéebned 力’sj.ue l edt(etタe rsriッzoerrチeitti euプvso ロcsniotー anz ブtwd ioeg)pii ttauiqlneua eèbm hpäeonsgts iiigbseiolen- cF設可iUos任ncfii意tgu 选dragbitleasli ,l ib.e erja. marat fein caolesfi gdur acbairlri e ra,
жdен lиoюs. mДлáяs э тdоiгvо еrsстoьs м mноéгtо раoзны. х методов. лEиnрtоrваdнaыs. de cap ura (Touch Probe) кsоroeн定lфieé v可и edeгsу能irgр fsüиiな
用tu 的模拟输
рgarуbアl е loaeмナur ыpetеロpl a,d uнnグigtа soпi入t,
出口,可配置
рp acи力tloмeiqn:е Euアрfiie,ng ナд,g uлnäロrяoa nкnbグgо lнce指цe, eеr令в.tgыifな.iх éf иoどe r s にbr設ake
Gvccフ上aaeeィ升r.ts i Peーc测etfhyドfre 速w oftバai,f或 nr pmッ dcl下uiieクògst降,khiオ seeoo沿uプidtnrs变oシr m aed化ョvgiésaン时etpihlaとuo,obnndDl存igebu.is储ali sln 当oLuonm前to edp实rios际psio位 mn置iebtl数oeds.i. Dlmデéieogジsnitタ.iatolルeria入nrge力ä lnoのg s立etan上t aoりu. Gsや ilni立 i ne下ginrりensの ssi検i ce出h leに rueよsnc りZitue現s st在oan位do i k定E(软пFnaуorntdтe可ne件t refréir gsaue.unp sfratr inoelounrebgmosa )ié nrd rpzeiqu. Brutes.e f,se üc rdoe Einnsnfpcidgioa-un/rRiabeblefleesr egnraztsucitheamlternt,
B值。 L s entr das digitales pued n co figurarse de ев能ых выключателей
O2つepizmのio 異n«iP なdroiる ffielエee dンVbeコalocーcki teダy d信Mu号aold をleo»o同 pw時irdに 評die価 Mすoるtoこr- bCo置praをitnpog記tiuseor憶nel.a すDItneiるpe. uDよtrsうe (hT、moデuocジmhタ ePnルrto 入ebrez力)eをug設en定dすe Eるnこerとgieが- SF設cIMnroageonlritd feivioagsenusr firSd üaaitgbnubliadetalisorl egp siadc rliiig beliirbtxea.e mlperao eAmunurte secng adtäepins tcgepoueonr,n fdiibgelue frsian,b de
a ili
FRВPоceoзhetsмosidbоuebжir lasimнdc оpakiсtod тosиeps isоnti бbideoрlrenа тsfvнe oeaоertйngd dсebuв gdaяaeucзlb иkaloe lиy onl oдDepoвnuоp aйSlн Loаoяll goоepбsраcтhнwаiяn - zTEВmuhхnaоfetunдr hédыereir g зawsаi t qiхCarвudla аe ipunт,а tnpau t(uleк rateоrspbн (acтTroаraeкcnucтh cнbehыern й Pu.c nrдo аfnbтlafчeingи)cкu)ore dde s uon tah eant trhae- СFвreо定бeо可 дaнn能оa дなloосgアт уoナпuнロpыuеグt цs出и, фc力рoоn:в電fыigе流u вrモыaхbニоlдeタы,な どに
kconufrisgeu/rdier bréafré zre.Bn.c feür Bremse
dTDE
とができます。これにより、機械的バックラッシュ できます。 設Wi定nd可o能wsa bDleLsL, (p3.2 e位j. /p6a4ra位 f)re,no包s 括编程示例
сや输Pвwi’pgя出弾rokз
om ьes触性d i
s(itDf发をe
ifbue bia補 dr
le
(elo 位L w正ns
vot置e ao すsegp
lue比n)ttる.ñc
a
较aor、Dl
edei D)escr oua dsM
n
lei
t
-gL o
enetmooanolrc
pspao
o cdrhaaesnnree bs aeimbm eeuvhnlatätálleutn aedtdaeuisdee. Цdиaф pрoовsыitеiv oвх од/ыy nмeоgгуaтt ivкoон, фsиг урuироrвdаaт ьсlя vтаlкo,r чdтe Uscite anal giche liberamente configurabili
dievuexrs si isgenganuaxl id een ccooddeeur.r différe о конфигурируемые, например, для тормоза
制n御ts がp 可u能enとt なêtっr ÜaLIncebgtseur rea sln esptirino éCeseainstpi onztnu rsvmeaä élt(uTzroeilqic uiuhsce ehsn t Po prDoeiubdgve iwet)anhlate uênstergveae ncr goa n plfäiogssusi-t Available software
Sorties numériques dispo ibles gratuitement,
GseCiximeòps ulcoplhtietawérnmsien seodituimgtsekul yelu.t iatnT,n ahbé isimrse egaenolilnotla.ew Cz sieno elndaueu pe aed l-Grulmoaeoles pctlo hdocwepo ic,n odtcrmihogel-
EF利ntradas an lógic s libremente disponibles,
ВEоsзtмoо жpнeоr mодtнeо вuреnмaе нrнeоgеu lиaсcпiоóлnьзоcвoаnни еD uдaвlу хL разp зpнoаsчеicнiиóеnт aеcкуuщaеlг.о положения сохраняется при появ SСLвrioneо用fбui оv可wxдe共aн能rоrf享eü дなg оd对bсソiтsa象уフprпeo库нト ыna еウin(bX aаェi8нlloeа6アлg о3eг2 оE位вiыn/еg6 вä4хnо位gдыe,,, ARMv6/
て配い置ま一す个。数ま字た输、デ出ジ端タ口ル,イ当ン运ク行リ到メ一ン个タル设エ定ン位コ置 , strGiéivclie hs ion dgre rnre emZsgusaasin ttdiaèviengred iet àaüd lbcgi ep r qowsucaseco ulhnares ovn ae.l tDes ausienre Edrineienp cl-ua out p.nofdisg Aiutuiroasn- Motion Studio
ー トリガー出力(ポジション比較) c fi ables par ex. pour frein
kwppeuhiònitcs ehveso rcsr glaeenar eb jeb emue ge mtesumsénacea aadcn h piaqtu uwunteoitro mde a.
kMvo7o/nvtf8iiog3nu2 rS位ietur,bldaAiorRMv8 64位用于Raspberry Pi和
лダ时иa、ч值rнアaы, ナхc 输oсロиm出гグнpа数イлnо字ンвs aク量эrн リк信lоメд 号еンрo а(タl按.g Тルu需аrкaエtи提a uмmンtlt’i供é ocоeコlamбc)lр。ーsláayаtnзt iダcitоicociмta a é, cm (вysopоe imзanenмr/lpt aоceueжso, ntнasieо-)l gatлiеc äнitnиug иem elпl oesоd iлnsоodoж icиot тhpmеetлi éьsiнlmc оvhгoaо ril siosиor/éelиieл d иràt e. оlclтahр иapцqoаuтsеeizл iьfolнanоnгeоc aфpttoрuоsaнitтleiаf MкWоoнinфtdiиooгnуw рSsиtр uDуdеLмiLoы (е32-/64-bit) with programming
特定の位置(調整可能)でデジタル信号を出力す WSBoeratgieles Baonnaelo) g以iq及ue编s 程di示sp例onibles gratuitement,
srfciéanidgteeau ddlaf,io tcsiro oemnm pdepucueehandal selnoa iarcoejapu lg s àbtio aarcréc hgakiul amtgsoehemc áacutnaitcdnoai mceil aeetsdniqt tieueclei.at .yAs .L tdAia-- TevвSхertaоi/ngolдiнgduaо enг r sоéd aOсgelиvua гtatнriptiаfgo лudg аat’. eud(Pnr oe(Pgs eonitnsi otifrtrnéio enC.to eCm oppmoaspirteaiv)roe )o negativo FWСeвraxeiiоalnnбidm dоvaдooepнwwrlо fesü sдs gDоDbсLLlтaóуLLrп e (н(i33c ыa2a2еn-s -aа// 6нl6ioаb44лgr-о-ebгbm iоAtiв)te uы)c nサsеo gtвneンäы ednхプsоgisдeルepыm,プo , p nロii bdグlie ラs, ム
уおпрよавびлеSниSеI アс дブвоソйнリойュ оーбрトатエнойン сコвяーзьюダ (とDuいal っLoたop多) д種ля るよう、デジタル出力を設定することができます 付
R cк固онき件fi ables
wgcmiaeitidàmtfe. m rEruea’nepn ozagdfsmeas shopib rflci tisolaee pa nlb’tsueaotuinrlrisizc z iosao upd dteoir rusmisenié’ntatsem odepr:se idats i :gtg reièatnamscl iomlnadcrager edrs-:i CTdLheaeslp s tdseuagirgelniidt-aaEllesi n.o gduäitgpniugtatesle (Tsco apunuc ebhd ePe rcnoo bnceof)ignufigreudra tros et hdaet kLoinnufixg suhriaerrebl da rкомпенсации механического люфта и нежесткости, proфgиraгуmриmруaеzмiые
多位様置な保セ持ン制サ动が器使控用制可能です。 ne
(特注対応)。 object library (X86 32-/64-bit,
D L应用文档
mcнinаoecсdrтn рe«tаmuaHиrlв soeа mnеitnмcaicnоolеergdé s emаM dвrseтiogо,n dмaiteаna»тluaeи lxdчos еi gneyс кuniaиnmtn. c daérПleróоimrqдg дuRiecеenрosfжtsea, и rl(iв senаencеnzrтcéiс/eocяmrd ouшesnn)rи gsy- DaSВmы oidoeхrid tоgdioдeiit g тaqTрilurt иaisegгli,гeg еpneрa arаEr l(a( Piсin suoоg оnsäтi eвvtnianеgoтltenoс a тrCk вtd öиoaeеnm npsпpeоoaлnlseоr iecжsti)oеóaн nbkи locяe)on pfniogfisguirutiireoarn-t ESLПAрiiroRnnhоfrMuuгätwрixxlevtа aSS6slмir ch/haмevhaan н7derr/aоeevi еlSsdo8d pоo g O3Oбofiеqt2nbbwсu-ijjпebbaeеcilrcstчet, tе d ALнLiiRиsibbеpMrraoavrnry8iy b ( 6X(lXe48s8-6 b6g 3i rt3a2 f2ot-u/-r6/i t64e4-m-ent,
a(suinf /ecionse) , sapnedz SieSllIe a mbseoclhuaten iesncchoed Peor s.ition. Hier- wvLaelsurd ese o(nor,nt i edresa qsnusue mbsteé).irmiq uAeusf tpretuevne net inêetre pcoosnitfivgeun- McRoaonstfipoigbnue Srrartybu ldPeiists
位e置ns保or持i: e制n动co器de控r 制in可cre以m集en成ta到li 设di备git状al态i, e管n理coder bi
р内eоnк。cиoй制 dаe动сrсs器о рa吸тbиsм合oеlн和uтt释oдsа放 тSч的SикI.о延в:迟ц时иф间ро可вы单е 独ин进кр行ем设ент Цbиl ф,роeвыeеmвiыtaх одnыa мsоeгñутa lк dонigфitиaгуl р(pироvваioть eсnя cтaакrg, oчт).о b特iott征t,, i oAAn图RR SMM谱tuvvd6i6o//vv77//vv88 3322--bbiti,t ,A ARRMMvv88 6 644-b-bit ipt feorr
i保nacu護rxe 機am能eanlotagliiq aussso(lsuinti/ (soins)/ cot sa)b esdo luen cSoSdI.er as- U保s持ciブtaレ Trーigキge制r (御Position Compare) o and BeagleBone) with
f Raspb rry Pi and B agleBone)サンプルプログ
sн位置üыor置。еl u st制эti нeSк御hSоeдIユn.ер ニыve,ッ rаsトнcаにhлiоeはгdо、вeы過nеs 電tиeн 流кMр、еeм過thен熱oтdн、eы過nе 小zэнu/кrо 過дVеeр大rы- orLпéрedиe e suдr /sоduсcnтeiиtd eжm nеdaeнiиngиiaiè ttзariаevlдie аàpnн oнFcоsleгasо no qпknоueoлe eо eжipnsеeosнsuиe яrrE eiвun ыncgдeoaа еncтfgeiсgeяru tsцar dиainфeter- WLRp硬oraiino件ngsdgdpioc手rwobaiewse册m lrDssrm L yDdL iP inL(s3iLg p2e -(oe 3/Bxn62e4ai-/b-am6/бl6geи4p4lтs elнb-eBыbistoеist)n) сcme пo) iрctnи o мenеje рemаsмepиml o デジタル出力を利用して、保持ブレーキの制御が可 ps id dei
f ラム付き
PD(電süriingso圧/upcte、noscg過s) t.iиito渡 iаfvnsбo電с dsо圧 лedю pe、т rнモpoыrtーеoe эtcタeнtкc・ioоcдケniеóрーnыブ SSルI.短絡、フィードバ aCviровой сигaнdалo r(П dоe з аloпрsо fсуe).no d parada pп固ро件гр规ам格миaрcоaiвózаniнoиnя能nako lでtmenuuteoすrrldo ld。elo e OoP tfpoaN Hosl/eisot iclOtodihonFiensF gw vr éeBgnrrtlag agkabe lsepm, ueenics shsioegr nuta nwl insrduem g. néarilqeu ael PMFirromtgiowranam rSemtuideirobei
の遅延時間を個別に設定可能 espielen
T electrónica de control de osición tiene cir El controlad r e los fr nos de parada puede n- フFirァmーwムarウェア
LDッ技haiクs术 ep c信p数oos号m据sitimti損补vioia失 充ndniindな信 pgerど 息codoにt eenz 対tripooすonllseeるirt ih保oan護sn pe機rmo能teenがctt 備iveesわ ct っirécてquuiいtis- Csraoogintg téirumonli gsoi mf(s hueorn ltdoein mgda i bnurdaneka)e. sp coasniz iboen ein tpergerdaetefidn itina LWi ux Shared Object Library (X86 32-/64-битные,
です。 A通ivni讯naudixl指ao Sbw南hlsea DrdeLodLc O u(3mb2jee-/cn6tt4 aL-tiiboirtna) reyt (eXx8e6m 3p2l-/e6/s64 4d be-bi tist,
FapЗ页cаu码щitoи 5тsн 6оc1е–o 5оnб6tоr7aр. удoовbаrнeиcе rrien , temperatura x egrarse n l gest ón de stado de dispositivos. 利Do用c可m能eなntマzニioュneア dルIまl geécすaeeoi d。mndb調saeatn 整occdvkio可remc rdu能cöiiu gtpなsrlor iec電dsnhiezt流k i,o pe制nirxtoace限tmens がceustnni 、totdeモonm D dーqpuisuタeapir lo及 alLantou びepor e負drpo,i u荷tcènirg物dceuをnri--t Tt(Уfhпruieрng аdzgвieoлvrеn-iнecAиe udе siуstgдpaaеtoрunnжsgi bи m(вiPlаeaoюn saщai trgиioceмhnm тi eCоesрontмmta.о )T.pзhоaмere d)elay times ApF应erRoM用aMgvt说u6rva/r6vem明/7 v/Cmv78h/av a3t8r2iot -3бn2ит-нbыitеi,s ,A pARoMnivvb88i 6l e64-4б-иbтнitы pеa ra
EadКcоnesнd sтki рvcöоaoлn,лv untеereрarn vnпo stоsiglлót alоnedжg iecеein нh,s иzuяev rfiиocitcмihlgtiеea еrgnтzgte weц eе , пoitd иr aeu зsnxаs tcщteieиrmтnsыictvps haо,é i,тe r cadпsotрhluiеncorвtherыrtesa- DcC n esto pueden configurars individualmente R機Fea能aspt比ubree較r Cr表守ります。 Управление удерживающим тормозом может быть реа- для pbeyrhr Pya iPr tyi иB BeaagleBBoonen)e с) пcрим еeрjeамmиp テaioenクm dbmニiega iカitnadleルeivn i dデAeuusaーs lflgryタeä cinoにgsne df関 igeköu すmnrenaるdein nft追o iser on加s wk情oitncfh報iginuはgr ieo、rnt fLH1ü 按ianr ru需Rdxaw提 sSaph供rbeaer Rerredyf OePrbie ujnenccdet B Liebargarley B(Xo8n6e )3 m2/it6 4lo bsi tdse,
Ecetii ndrci upoidrtoset reisnzi giotnhnaeel e dm aao ustsoogvr reacwcaeobrrlteree, tn awtneed, rs daoegvnraa.i ntSesomt mpfeiete ridas--tшturxеarcнanиe,s яssi oтoоitvrtкioeoаts, e,т dnеdsмei пtosеenр neаsт ueiуóр stnыeo ,yn v нcsrеaioдotreоntсnosтsc аiтieorоctnчuнediо,te гocоso и ndt teсrлnol иcs tшairoaкbnоnlмes-t waLCл5loиna6eosз d1rnо cd–t вtoi5аerfoнmn6fо.l,9l mpoпdo retardo para conexión y desco pハHaーrdドウrェac アRi・óenリferフeァncレeン ス
ペр adиーsne уsdiпジ bfeрrаe にвdin лよeuiе i нdnりfиeir иまesm itсnすaо e сz。idтinoоesяn tнeamиlmеlabмiea nуnrtсeitтeonрnо P йeoстsвtiаt i.io nВntрésе- PAпFрirRrоomMгgрwrаvaм6amм/rveиm7 рS/оivepв8аreb н3cиe2iяfisi cbpaitietsilo,e AnnRMv8 64 bits pour
ebisвdnыiiaetsnсoclue оrkmfк if оsidDosгiоgiatu otnaeнratl,nа- elLaп slsрsoi,oя sío dжnscpeeе.o -нAs Rmeи nяse oc,aug o dreоptrjтeltau onrsnп astcеga iрiop rbеcnézlпeusurаd i дrctt ioоurdвaK rad nro eeнsdmаnliletпatpoр l sieяlrmiжnenеñeisstн,aa иltt d яdiiode enesиl wgIмnl еrecaнxrobнtiómы lenеa i .ndзnа adдnoеisgр diжlteaк иlg e fпesreр sиSnt iioвg кndл aiюd lsчe tеasaнu zиésiиotg aиnet asgоm тedкbлeeюnsnчt aoе wнp pиpirиuad òмr e(оeaiгlsuуs-тf. FFRFМiiiaиrrrmкsрpwwwоbпaaaeрrrrоreeerг yр SSа Ppмpieм eecнctоi ifBfеiic ceоaбatеtgiсioolпennBone) et exemples de
vcmooonut romtrse-e cceihr cpaueniritsdsci tshaue rdm lee l Scspâeibgelnle au mlnedo d teEi uflaers eatdiiznbistaäic tqk um. eUö dngea-
Communication Guideечение
pкfeоrрeoоdtтebкcиatхs k зtа.h мUeы nmкaаoнliиtmoй riв ta кncаdiбó еlnoл еa djдu.вsиtгaаbтеleляd, eа cтаoкrжriе nпрtи ASPsбыeunтrnpfьerdp a сialgnкenоetmeнt) .фgel’иrnianгtуtaoрérи gynр reоaiвnlt аsifнoiыsnrtm ,иe нimalд tиeaioвs dиntдi pуgfаoeлrsь sнtieоiob.cnlehe n dicea lllco od snataftia- DECpCДrogrammation
Arоoopohсcm
m
pтäulуilmctпmlнaiu
uceаnntihяni
i
o ect
cдna aо
a
Dctк
t
Nioiiуooóмkn
n
tneuе
GнGsdmтiuusаeiiцpdndиoeteяantiibolne
lllпpiaiоcmr тohpеitt,рe adеrgz tiсieeoи nгesdнeilucа m лi hmаs o aipоgtuoбontрrsao аytlmт aнldbоae йitcl iesaсr eвcrdgяtheзoa иltul..ua r.Рn cеeUoгnуnrл relиeä рnslуitmsеeмt .ip tоEaеet irnоiomг рbneа rнtedtиiee- pgtInouaf grodeerrm l5 iand6cdi1si–iópv5niod6 su7ai.etdilvilceoim.o Inenan lqt rulefse trtoee nmtepo sda o dd eèa tropesot astrsédicb nailieu- FAFAСрeipprаamppвtlнluwiiеccraнaeaиrt teеCiioo хhnnаa р NNrаtкooтttеeeрssистик
tcdчeеoi нspuи Srrеoa pтtneоetкkg rаtég rдugeлmlrяae bз vmаloeщon иpt тSorыore etдnè вesgиo гecаr aeтleеrni лcm яios oиt. tzнeuаuгläрr уseзstк iиlga.: cdhigairtgalee. AdcДоoénпnmsо,ftл iaepgнruáиrтagerеagriлnureьanн eаg5stя 6i v nàи1og –нln’o5aф lr6Hоarр7êra.мmtl.аteциnbяtr eп mоi tsтeеeхmnниpчi еdскi иrмit aдrаdнoн ыiмn HDРуoaкrcоdвuоwmдaсerтeвnо tR aпetоif oeапnrпe dаnрicsаeтpн oыnмi bсlрeедствам
Inkrementalencoder, analoge Inkrementalen- Dfнaаis eсe тA рd.n i5 si6nt1es–ue5er6irm7u.negn tdoe er dHiaslitnesberrei mesnet oka. nn im Ge- FFСпierеmaцtиuwфraeиr кeCа цShиapяre tмcиifкiрcоaпtрioогnраммного обеспечения
cSoadfee rT o(sriqnu/ceo Os)f fu (nSdT SOS) I-Absolutencoder. rInäftoersmtaatutisomnsa nasgupepmléemnte netianigresb unredleanti vwese rdaeunx. CHРуoaкmrоdвmоwдauсrтneвiо cR aпeоtif oоeбnrмe Gеnнcuуei dи eнформацией
Con questa funzione di sicurezza basata sulla DcMarbgaecgiti okéörin sintifeqonur emdsiae tz eViocenhrzin ösiqguuei edrusan tPig atsegzcen i5itce6in 1P– ba5eg6i.m7 . Ein- FЗаirмmечwаaниreя пSоp пeрcиiмfiеcнaеtнioиюn
Schutzeinrichtungen Application Notes
u5n6d1– A5u6s7.schalten individuell konfiguriert werden.
Die Positioniersteuerung verfügt über Schutz- Communication Guide
beschaltungen gegen Überstrom, Übertempe- Application Notes
Zusatzinformationen zu Technische Daten
ratur, Unter- und Überspannung, Spannungs- Seite 561–567.
CEРаPaбOrоaчScи4tеée- 性 pхrLiаíres能eрrtiаsfii特oqcк参turaтm徴е数nzesрig saoиt sénсdmтcie иn eкpi rиfcuk ahEimnsaPzs OradiaoSlenc4 tclaeel riE tiEsàPPtOiOcSsS44
−ー DH最MВAыelöaát大сnacxо s功hiのкdmiаste率яé電tuane уm d密s d力дLeiе t度epлà密 npiьo s。sduн度wtiаiud sяepnas rмogad dоtsn eщedcnenнiezcо sp aсhmiтto.tyьeat..e.xnimciuam. .
−ー PÜ高即CУOбerbotе使ダetrenдifsmoイи配rvtzтrianナеme置c лcupiミaь高iogrnнnnッeаg动csяen クet cs态рdaso аなzed б电ndi eoоRtモeчr机 nceo аriーoя gl,éd pneпgタi仍 рtelruprоeにrol然eиfagolзrも tocв可friomlо対aдnr以nzmaи 応vicтn确oiaеocnすлn保ceьzvるeн ,出,e aо naviс高色tnueтcьいcns的 haвh ,we 制n控 tтf atiоpüte御mм制hres rhчb能,性 иomiigéс能力cлoêhnhеtm。l dypoи yrae уin r apвalы otmaсuоmiorsк tdcоeoдhenrиestнe sа -alta-
ー− mM豊丰dмиyioone富чnattнnaeo的なыtmureхe反フir ciдdsnciィв馈 i. enиmーxгá选аotmドтr项têеoiлバcmr。еsoッйe.s.m .ク e・nオt dプyシnaョmンiq。ues.
−−ー PU周多CОAEoбxmo种辺шstmepfsиIa機n/рiipbenOнsr器 giыea连plirеtshoへeé接 eвspiscоnのs选o зhdsiмsb多e项eiiоvib l жeFir様,tiele нàiftdо可なe odсaeduтi用Id dиb/rfOee ba于оéseaбc接t р连deckdаmnbk続eт接 daн oöf。оcu外epgйket l围.сisdocв.bhn设язaksи备e.c.ikt。.en.
−−ー PVコ针DОMMoбiieンoú对vшslellfsиtトt控ärieрipsblнロpt制eliiыellg iiーеIsct器e/é iOв pラs和Ipо/o зOcoとt驱мsrosè-iドоbsAn动sжiiラn blнd的iesdоiiイlсvcia可tтethàdブиir靠ol e usdпへnsisоi的f дsicoのdéк保mopeл多lt юlsö护cieo くчgodg特nеlneのaiнsceи性 m chfя保xook 。eiвóren護nх piоntoд 機eedо rnxIeвi能/i p/ OofвEühn。ы /repsSх Preо aEpдerl/ оasraSвi.rp aдphp лpoeaяeur вiergнi cf еeécшrrähнictiи eopх. se.riferici.
−ー− pKC配éormipphréormiqiusesslo.− FU
уFFсuuoAn
т置nnрncN
оzc和co
йoiitmo
oсp通тnniopeвie讯 .nrndssoに
通i dm
dpよ过eeri s
るpCpistrn
r
oe
A設gozt
N teSip
eo定occr
cnptohと
ceeiotu
ie nó通natcz
ns( sft
C信s uisav
ionAine
nlk u(s
3 Cftc tei
0
caoi
oaA1o n
np,t mue
43crn0e0pre
s2
r1cfsoü,
i,o o f43mron
n 00Crter5is 2oc
s)
p,n
,o l pl3Rotenr
a0Surto
rr 25earlol
3
e
c)la
c,l2o reRz
o ,nur
inSU otna
t2Srd
rnoa3Bô dlA
lm2或ae dun,
de 选rrtU
orsinviS
r配
et
oyebB.的. t .
m otor.
− Configu
もEБеtしhскeо
くrмCп
はAрTrrоaオ. мIzcプEиiiCoсóс
シn6nнョe1 ыy1 5еec ン8 зocаmで型oщmE号иutтnuh1н2inыec iEеracC tcфahAizуóeiнTornк。Cn цaAIeиE Ttи Crt从 arдa6лv站mяé11 s:кi5tо ed8н C eт Cрo TCAоEyлAN(лNеo在р poа1epE 2иnte hп nE(eрC tиr(ChiвAeоiAA дr3TаC 0架3.A01构,T 14, 上
−
eKC实К4оno0现нtn2фrafCf,иi iîg3Anгуu0eNрr5mаa总ц)t,teиi io线Rяnn S应tиs 2 uaк.用3nом2d层м, KcU)уoнS根иmBк据а
m uциI uEoяnCp чikcc6еaрi1o8еtinз0o aC0nlA m-üvN7ib
配eoapen C置ertn eAC 类 (NECA型itAoNh p13oe.e04pr1Cn e(,C An(4CiT 0A(.i2C AI4,E i 3A03C02 035 )61.)0 ,,1易 1R41,5S 0于2823集 t,20 i,p2成 o,
− C4ス至3US0oレ现B52n иーf,)有 ,iл3 gRиブ的0u Sв:r5E a2к)tI,t3аEh iRчo2eCеSn,rс 6CU 2тe1вA3St8еT 2Bc 0系о,o, п0 Uomц统 -SиrE7 m。иEBt hEtu 可ohetPnhder与eirCcreroCCaA其rfA itATolTi他e.oTp .I .nEМ tEIi EoCtvЭThCinКy ae6 ap 6 r61Cle1 11E1A5 15t58NTh818单 eo T т ryи元pп(C e相1i 2A1互 2В е联Eд4tо网h0мe2。ыr)йC準EAt拠The SのrClaA vTe: :
ptCyepAneT (.1C I2Ei AEC t3 h60e111r,5C 48A0 T2 y,p 3e0 12 EtherCAT Slave: CoE (CAN Application Layer over EtherCAT) 5),
− R借sCC
12
oo
Et
助E E(M(у
h(рC
e
oоEA
rC
вtiеotN
A
нhnь A
T
e Sпpr
S
рtuCp
l
иdлl
aAiоic
ve
oжT G上еt
: iCнUoиのn
o
Iя和
E
CLC
直Aa
(CANy观 e
ANчrNе化アрo
A
е的v
p
зプ 工Er
p
t リhE
li
具et
c
rケh
a
可Cet以ーr
io
TC
n
) 进сシA
L
оT
a
行гョ)л а
yer over EtherCAT) con-
folSar2mve3e:2 Ca, U oIEESC B(C 6oA1u8N E0 at0hp-ep7rl iCPcrAaoTtfi,oi lenn Tl aoyypeetri o 1o n(vC.e IiErA CE 4t 6h0e121r)5便C. с8ンSAн捷 eоTT層n y的)М pccЭ)调ieolКl ma。 1试62 ip1既n。 8Elti0aet存0hng-etr7の ar Cтcи AiпóT n
− SnE利wпseрaeltnia用оhtc hфvsehoe库 iиIrs nE:IлC tE和dCяCeAC omo1 编T6 EI6(シa1EC程 81s(iC8ACス0 示 E 04A60テt0例0N1h-28ム-7e ),7A.0 r pへ ЛCpP可0rеporA-のг以o7кflTiifа cl容 pi高eяylaer a иtto易效- iyнeTofpтi地なyxnlеoepiг s集L 統рet1tаai e p(成1ц合Cyn oи(eCi到tя 。Are1 iв 他osA众(4 C.сv 04у多のCeiAщ20ro类 E е)24E.nс t)E0t型eтh.h вa2cEeeу的st)irю.rnayC C系щSfb iaAAneиl统ecTеTtmhe ユ)e。с egpsиn ニrсleI iaтrncleеッotetiмedno ト ыg ncI Erと oianCtnh-ネte oor CtrAaTs.
− 6tッ所eМiunio1xnоトt8有inжeisd0ワ gеt软iani0тrndー a 件-рbgez7аク ei均s бEoTsо tyE接n可тthpeаtehт続e随h ьrne eC de时可вrnCAe iс d免能s TеApeiт Ts费r и。.Eoty eс提fts ihmдlt 供eо1i mпr (E。CCоsлtAihнA. TиeC -4тraSеC0лnyA2ьs bнT)t.ыe Ieмnm csиtoiée sуn.gtс eVnrтaрneоttrciйino.tс enCтdtв oszа btliмlmoeaи grpa E a mltnehbe eiditrlt eCawA nioenTsir. t krede oretefs n
ー− sE直全oПcPyрtou部hs観оneсte ès文т的arеtm ClaEйt档なrAш eteeh和Tsиツn e-uй E E出r ーsnпCtieinуh色tルAсràhevкT的 eでrE i вcCiu t支iMэhAenoкeTni 持oсtsr .sпteC。л.ioxnуAincаsTтi .tlаSalíцsntиuitюmsd .пai oMр m иiG sпeeUоdм Ieiをоanщn 使rиtée гっs рlaeаた фainu簡иt чepе単roсfкsaなоszг初i оbg пrl期eáо лfaセiьcvзッaeо вcdトа eте uльs-ua-
− dEアсFriк’iaoッnоcs uгfMоプayitl ercoи。e hнtomsiтsom еuetnрenmsф SsiItеniatésйub sсidenаi oEi t oMsrnti heoicnterboivgorninC zva iSiAionhatTu tm c.Mudoietoni vmсt ia Moиistнno тMh tуSieиotтruntrиida oвSmiнnotыu- iGмeSdиntUiuo tиIad нGasiсon.Uт-рdIGу eмinU еtIнou тmoiаtliмi vtiиn ei.nt tutouitoiitvlisvi..en
ー完− 整MT様LБoиibi的々бsorлelaeなsи产 rо.eiíтシe品anеs кスes套 иayed テ nиr件 eev dпjムise可 cрpemиへerm为м optеのrgpl您рèoriы効s ad的 mпsdi率 рi运pemоr的г o动рpinаgrなlogeм控rag м導ae制mrиvxaр入eam解оcmвのa а决ipnzнcたиilt方ioeóяめsn r案дf e fлaのpo я带cpar ラeэ re来фa rufイ фflu更t’ieicеブnliкfi高saefтラia иcni的ntвatリeн tci附euоnとeгgrtо 加eサrMi na g值tcoンreaitóg。iプtoinronaル ne zS fi oitcunideni o-
− eBプiиntneнtei bロт aoeiе l puinгwグoрti ùtilиラdolhsр seо ムivв knmvaаet。arнuánirиaiis tяeuti fidtnв sys id.с viosа ePмftr ersыomyoеgs iрrt. аaesзmiнsыtmseе.m iсeиraсbsтe.еiмsыp.iele für effiziente Integration
ー− BiすAВTnсouil bべlеvtd s tleпieてorр sftоlteのh cгlwoр èhcソаasqioмer ucフemмdeo нecトpsmыno еウesmpn кtoェ epоnм oxSアetпeniy・nо mesнtコotneеpeнftsンltmsтe wdы aseポa сr.dr eвーseeо of б srネpfоetдrweンmoнlaоgyトp r rдaerоはev mсea тls、iimуbltいaпáeнabnrыつtla ie soвmで i naeлet юもmq naбuptn無оeir еyp e 償aвte icрlmirにеbcmмerてяe.s.mts入tieb手niltit. eu ne
− iA可FПDdnоulitols能дéellcpр g dSuо。orбmoanнctfiаebtiuoяwnlm enдatsaо erк.eznfуikfoмtioacnеmtaнeioтc pаcenцo иdanmяnae иpdn ls вteoeы ltuenдatаs seю tsidanщy ndsаed яtcjèсeicnяmde gпele оlsreдszunд elpеetieрpts ж fo srpкrelаtuir.. vsie zdrioifvü edgrib saa.sr.sistenza.
−ー TA詳Douo細uscsfuマü lmehニrsel iュcncothアamecル Dpióとoonsk 優dauenmれtaseたl nldaサtuad talポoio ygーn iec トuxienc。lde s lheoenrtae du sisserpravoginceinbodl eteésrc gSnriuacptoup. iotermt. ent à
TПIlо hptлeoaн ucыtocй mhm кeoоptмmtleoпetл cenеo кtp.mтa дcpлklяea tВgoаe шp feеoгrrо ly aрo еtuшraе mн sиoяlt uуioпznрioа cnвoлenе Mнtrиoяtl iдsoвonиl жuCtеoiнonиntеr wмo.ilt cho n
−D付avEd al 加Dlpdsooa er価Gceqdeu 値 avsmegaのtlegmuあni eucttp.naるoattmioMko.penolt ect fitoüoomrn pi Cphalrorèeant e Mtsr ueo tlts ソieooxリlnuc-ュceCilーlóoennnシ ttMr ョsooulンt-piLopのönos完 rCut no全tegnなc tmrhoパnilti ッ qcMuoケeenh. ー vrawジloerr t.
Laeñ paadcikd coo.mplet au service de la valeur ajoutée de votre solution Motion Control.
© 202244 m maxaoxn.o Вnс.е AT無保 пoullр断留tude rаtso iвRg 転所 iаsd hed з載有rltciаosrhщisi を权trt иsdeiщ禁利 se rviéеersoじ。нsrerыvecbrま0e.vhr e5Иvdaoすhé月з.ts дiasM.。 а 版lr.Et нeaEeиd0s。ydnе5i ez e.i月м技t riAdiovаo版uianя术tn.sdie o 。Иm参go nmзas仕мa.数 b.aS iеE.eg様н 如uMd яgMbеはi有iocjтoeaсdi.変ó变ciя i.Sf ntбÄi更 o动c tеmnogaзさd, tgacуieвoyれh恕еrontauдt.るso不о nS м rgaこu另éлe jеsm.eとn 行нe t иovrがя通vdo .aé irあ f告 beimcseり。ho.hedまa .ilftすiecna。.c iones. maxon motor control 559
motor control
Page16
560
EPOS4 位置制御ユニット 概要
Module + コネクタボード = Compact
USB GUI
EPOS4 Module & Micro アクセサリ(別売)
403968 USB Type A - micro B Cケaーblブe ル
536997 EPOS4 CB 24/1.5 CAN
620048 EPOS4 CB 24/1.5 EtherCAT
534133 EPOS4 CB 50/5 CAN
620044 EPOS4 CB 50/5 EtherCAT
520884 EPOS4 CB Power CAN
604594 EPOS4 CB Power EtherCAT
581245 EPOS4 EtherCAT Card (a) (a) (a) (a)
638677 EPOS4 EB Micro
659508 EPOS4 MB Micro EtherCAT 3-axes
590738 EPOS4 Module SMT ソsoケckッetト 2 2x x2 32 3p極oles
677324 EPOS4 Micro SMT ソsoケckッetト 2 2x x4 04 0p極oles
(a) マザーボード側でコネクタ必要
EPOS4 Compact & ハウジングタイプアクセサリ(別売)
520858 CAN-CAN Cケaーblブe ル
520857 CAN-COM Cケaーblブe ル
275934 Eエnンcoコdeーr ダCa・bケleーブル
520859 EPOS4 Cコoネnnクeタcto・r セSeッt ト
581245 EPOS4 EtherCAT Card
691408 EPOS4 MB 3-axes Conn. Set
422827 Ethernet Cケaーblブe ル
275878 Hホaーll ルSeセnsンorサ C・abケleーブル
275851 Mモoーtoタr C・aケblーe ブル
520851 モMoーtoタr C・aケblーe Hブigルh( C高urr電en流t )
275829 P電o源weケr ーCaブblルe (b) (b) (b) (b) (b) (b)
520850 P電o源weケr ーCaブblルe (Hi高gh電 C流ur)rent (c) (c) (c) (c) (c) (c)
520856 RS232-COM Cケaーblブe ル
520852 Sセeンnsサor・ Cケabーleブ 5ル x 25cxo2r e芯
520854 S信ig号nケal ーCaブblルe 77c芯ore
520853 S信ig号nケal ーCaブblルe 88c芯ore
520860 STO Iアdlイe Cドoルnnコecネtoクr タX9 X9 (i) (i) (i) (i) (i) (i) (i) (i) (i) (i)
403968 USB Type A - micro B Cケaーblブe ル
(b) ロジック電源用オプション (c) 電源用で必須 (i) 同梱
EPOS4 Diskアクセサリ(別売)
710928 Bブrレakーe Cキa-bケleーブル
710931 CAN-CAN Cケaーblブe ル
710932 CAN-COM Cケaーblブe ル
751388 CAN ix Industrial Type B プPluラgグ
696285 Eエnンcoコdeーr ダCa・bケleーブル
710926 EPOS4 Disk Cコoネnnクeタcto・r セSeッt ト
710934 EtherCAT-COM Cケaーblブe ル
710933 EtherCAT-EtherCAT Cケaーblブe ル
748166 EtherCAT iix Industriiall Type A プPluラgグ
275878 Hホaーll ルSeセnsンorサ C・abケleーブル
696284 Hホaーll ルSeセnsンorサ C・abケleーブル
710930 Mモoーtoタr C・aケblーe Hブigルh( C高urr電en流t )
696283 Pモoーweタr ・& ケMoーtoブr Cルable
710929 P電o源weケr ーCaブblルe (Hi高gh電 C流ur)rent
696286 Sセeンnsサor・ Cケabーleブ 3ルx2 c3oxr2e芯
520852 Sセeンnsサor・ Cケabーleブ 5ルx2 c5oxr2e芯
696288 S信ig号nケal ーCaブblルe 77c芯ore
696287 S信ig号nケal ーCaブblルe 88c芯ore
696289 USB Type A -- Miiccrroo--LLoocckk C ケaーbleブル
5 60 maxon motor control © 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。
motor control
668844551199 CCoommppaacctt 2244//55 EEtthheerrCCAATT 33--aaxxeess
554466771144 CCoommppaacctt 2244//11..55 CCAANN
662288009922 CCoommppaacctt 2244//11..55 EEtthheerrCCAATT
554411771188 CCoommppaacctt 5500//55 CCAANN
662288009944 CCoommppaacctt 5500//55 EEtthheerrCCAATT
668888777700 DDiisskk 6600//88 CCAANN 552200888855 CCoommppaacctt 5500//88 CCAANN 663388332288 MMiiccrroo 2244//55 CCAANN
668888777722 DDiisskk 6600//88 EEtthheerrCCAATT 660055229988 CCoommppaacctt 5500//88 EEtthheerrCCAATT 665544773311 MMiiccrroo 2244//55 EEtthheerrCCAATT
668888777755 DDiisskk 6600//1122 CCAANN 552200888866 CCoommppaacctt 5500//1155 CCAANN 553366663300 MMoodduullee 2244//11..55
770099885599 DDiisskk 6600//1122 CCAANN SSSSCC 660055229999 CCoommppaacctt 5500//1155 EEtthheerrCCAATT 553344113300 MMoodduullee 5500//55
668888777777 DDiisskk 6600//1122 EEtthheerrCCAATT 554466004477 5500//55 550044338844 MMoodduullee 5500//88
770099886622 DDiisskk 6600//1122 EEtthheerrCCAATT SSSSCC 559944338855 7700//1155 550044338833 MMoodduullee 5500//1155
Page17
561
EPOS4 位置制御ユニット データ
EPOS4 Micro 24/5 CAN EPOS4 Micro 24/5 EtherCAT
120/360 Wまでのブラシ付きDCモータ(エンコー 120/360 Wまでのブラシ付きDCモータ(エンコー
ダ必要)およびブラシレスDCモータ(ホールセンサ ダ必要)およびブラシレスDCモータ(ホールセンサ
とエンコーダ必要)に対応した小型OEM位置制御 とエンコーダ必要)に対応した小型OEM位置制御
モジュール。 モジュール。
コントローラバージョン
CANopen スレーブ EtherCAT スレーブ
電気的データ
電源電圧 VCC 10 - 24 VDC 10 - 24 VDC
ロジック電源電圧 VC (オプション) 10 - 24 VDC 10 - 24 VDC
最大出力電圧 0.9 x VCC 0.9 x VCC
最大出力電流 Imax 15 A (<10 s) 15 A (<10 s)
最大連続電流 Icont 5 A 5 A
スイッチング (PWM) 周波数 50 kHz 50 kHz
PI電流制御周波数 25 kHz (40 µs) 25 kHz (40 µs)
PI回転数制御周波数 2.5 kHz (400 µs) 2.5 kHz (400 µs)
PID位置制御周波数 2.5 kHz (400 µs) 2.5 kHz (400 µs)
最大回転数 (1 磁極ペアモータ) 50 000 rpm (正弦波), 50 000 rpm (正弦波),
100 000 rpm (矩形波) 100 000 rpm (矩形波)
内蔵モータ・チョーク/相 – –
入力
ホールセンサ信号 H1, H2, H3 H1, H2, H3
エンコーダ信号 A, A\, B, B\, I, I\ (最大 6.25 MHz) A, A\, B, B\, I, I\ (最大 6.25 MHz)
センサ信号 Clock, Data Clock, Data
デジタル入力 4 (Logic レベル) 4 (Logic レベル)
デジタル入力 “High-speed” 1 1
アナログ入力 2 (12-bit-分解能、-10…+10 V) 2 (12-bit-分解能、-10…+10 V)
CAN ID / DEV ID 外部スイッチで設定可能 –
出力
デジタル出力 2 2
デジタル出力 “High-speed” 1 1
アナログ出力 1 (12-bit-分解能、-4…+4 V, 最大1 mA) 1 (12-bit-分解能、-4…+4 V, 最大1 mA)
エンコーダ電源 +5 VDC, 最大 115 mA +5 VDC, 最大 115 mA
ホールセンサ電源 +5 VDC, 最大 30 mA +5 VDC, 最大 30 mA
補助電源 – –
インターフェース
CAN high, low (最大 1 Mbit/s) –
EtherCAT – 100 Mbit/s (Full Duplex)
RS232 RxD, TxD (max. 115 200 bit/s) –
USB 2.0/3.0 Data+, Data- (Full Speed) Data+, Data- (Full Speed)
ステータス表示
LED 緑 = READY, 赤 = ERROR 緑 LED, 赤 LED 緑 LED, 赤 LED
周囲温度/湿度範囲
運転温度範囲 – 通常運転 -30…+45°C -30…+40°C
運転温度範囲 – 高温時 +45...+70°C, ディレーティング: -0.200 A/°C +40...+60°C, ディレーティング: -0.25 A/°C
保存温度 -40…+85°C -40…+85°C
湿度範囲(結露しないこと) 5…90% 5…90%
機械的データ
質量 約 6 g 約 7 g
寸法 (長さ x 幅 x 高さ) 32.0 x 22.0 x 7.0 mm 36.5 x 27.0 x 7.0 mm
取付 M2ネジ M2ネジ
型式番号
638328 EPOS4 Micro 24/5 CAN 654731 EPOS4 Micro 24/5 EtherCAT
オプション(別売)
309687 DSR 50/5 シャントレギュレータ 309687 DSR 50/5 シャントレギュレータ
オプション製品一覧は578ページ オプション製品一覧は578ページ
© 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。 maxon motor control 561
motor control
Page18
562
EPOS4 位置制御ユニット データ
USB GUI
EPOS4 Module 24/1.5 EPOS4 Module 50/5 EPOS4 Module 50/8 EPOS4 Module 50/15 EPOS4 Compact 24/5 EtherCAT 3-axes
36/108 Wattまでのブラシ付きDCモータ(エンコ 250 / 750 Wattまでのブラシ付きDCモータ(エン 400 / 1500 Wattまでのブラシ付きDCモータ(エ 750 / 1500 Wattまでのブラシ付きDCモータ(エ 120/360 Wまでのブラシ付きDCモータ(エンコー
ーダ必要)およびブラシレスDCモータ(ホールセ コーダ必要)およびブラシレスDCモータ(ホールセ ンコーダ必要)およびブラシレスDCモータ(ホール ンコーダ必要)およびブラシレスDCモータ(ホール ダ必要)およびブラシレスDCモータ(ホールセンサ
ンサとエンコーダ必要)に対応のOEM位置制御モ ンサとエンコーダ必要)に対応のOEM位置制御モ センサとエンコーダ必要)に対応のOEM位置制御 センサとエンコーダ必要)に対応のOEM位置制御 とエンコーダ必要)に対応した、すぐに接続可能な3
ジュール。 ジュール。 モジュール。 モジュール。 軸コンパクトソリューション。
コントローラバージョン コントローラバージョン
CANopen スレーブ、EtherCATオプション CANopen スレーブ、EtherCATオプション付き CANopen スレーブ、EtherCATオプション付き CANopen スレーブ、EtherCATオプション EtherCAT スレーブ
電気的データ 電気的データ
電源電圧 VCC 10 - 24 VDC 10 - 50 VDC 10 - 50 VDC 10 - 50 VDC 10 - 24 VDC
ロジック電源電圧 VC (オプション) 10 - 24 VDC 10 - 50 VDC 10 - 50 VDC 10 - 50 VDC 10 - 24 VDC
最大出力電圧 0.9 x VCC 0.9 x VCC 0.9 x VCC 0.9 x VCC 0.9 x VCC
最大出力電流 Imax 4.5 A (<30 s) 15 A (<3 s) 30 A (<5 s) 30 A (<60 s) 15 A (<10 s) 軸ごと
最大連続電流 Icont 1.5 A 5 A 8 A 15 A 5 A 軸ごと
スイッチング (PWM) 周波数 100 kHz 50 kHz 50 kHz 50 kHz 50 kHz
PI電流制御周波数 25 kHz (40 µs) 25 kHz (40 µs) 25 kHz (40 µs) 25 kHz (40 µs) 25 kHz (40 µs)
PI回転数制御周波数 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs)
PID位置制御周波数 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs)
最大回転数 (1 磁極ペアモータ) 50 000 rpm (正弦波), 50 000 rpm (正弦波), 50 000 rpm (正弦波), 50 000 rpm (正弦波), 50 000 rpm (正弦波),
100 000 rpm (矩形波) 100 000 rpm (矩形波) 100 000 rpm (矩形波) 100 000 rpm (矩形波) 100 000 rpm (矩形波)
内蔵モータ・チョーク/相 – – – – –
入力 入力
ホールセンサ信号 H1, H2, H3 H1, H2, H3 H1, H2, H3 H1, H2, H3 H1, H2, H3 軸ごと
エンコーダ信号 A, A\, B, B\, I, I\ (最大 6.25 MHz) A, A\, B, B\, I, I\ (最大 6.25 MHz) A, A\, B, B\, I, I\ (最大 6.25 MHz) A, A\, B, B\, I, I\ (最大 6.25 MHz)
センサ信号 A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ 軸ごと
デジタル入力 4 (Logic レベル) 4 (Logic レベル) 4 (Logic レベル) 4 (Logic レベル) 4 (レベル切替可能:Logic/PLC) 軸ごと
デジタル入力 “High-speed” 4, 差動 4, 差動 4, 差動 4, 差動 –
アナログ入力 2 (12-bit-分解能、-10…+10 V) 2 (12-bit-分解能、-10…+10 V) 2 (12-bit-分解能、-10…+10 V) 2 (12-bit-分解能、-10…+10 V) 2 (12-bit-分解能、-10…+10 V) 軸ごと
CAN ID / DEV ID 外部スイッチで設定可能 外部スイッチで設定可能 外部スイッチで設定可能 外部スイッチで設定可能 –
出力 出力
デジタル出力 2 2 2 2 2 軸ごと
デジタル出力 “High-speed” 1, 差動 1, 差動 1, 差動 1, 差動 –
アナログ出力 2 (12-bit-分解能、-4…+4 V, 最大 1 mA) 2 (12-bit-分解能、-4…+4 V, 最大 1 mA) 2 (12-bit-分解能、-4…+4 V, 最大 1 mA) 2 (12-bit-分解能、-4…+4 V, 最大 1 mA) 1 (12-bit-分解能、-4…+4 V, 最大1 mA) 軸ごと
エンコーダ電源 +5 VDC, 最大 70 mA +5 VDC, 最大 70 mA +5 VDC, 最大 70 mA +5 VDC, 最大 70 mA +5 VDC, 最大 100 mA 軸ごと
ホールセンサ電源 +5 VDC, 最大 30 mA +5 VDC, 最大 30 mA +5 VDC, 最大 30 mA +5 VDC, 最大 30 mA +5 VDC, 最大 30 mA 軸ごと
補助電源 +5 VDC, 最大 145 mA +5 VDC, 最大 145 mA +5 VDC, 最大 145 mA +5 VDC, 最大 145 mA –
インターフェース インターフェース
CAN high; low (最大 1 Mbit/s) high; low (最大 1 Mbit/s) high, low (最大 1 Mbit/s) high; low (最大 1 Mbit/s) –
EtherCAT 581245 EPOS4 EtherCAT Card(別途必要) 581245 EPOS4 EtherCAT Cardでのオプション 581245 EPOS4 EtherCAT Card(別途必要) 581245 EPOS4 EtherCAT Card(別途必要) 100 Mbit/s (Full Duplex)
RS232 RxD, TxD (最大 115 200 bit/s) RxD, TxD (最大 115 200 bit/s) RxD, TxD (最大 115 200 bit/s) RxD, TxD (最大 115 200 bit/s) –
USB 2.0/3.0 Data+, Data- (Full Speed) Data+, Data- (Full Speed) Data+, Data- (Full Speed) Data+, Data- (Full Speed) Data+, Data- (Full Speed) 軸ごと
ステータス表示 ステータス表示
LED 緑 = READY, 赤 = ERROR 緑 LED, 赤 LED 緑 LED, 赤 LED 緑 LED, 赤 LED 緑 LED, 赤 LED 緑 LED, 赤 LED
周囲温度/湿度範囲 周囲温度/湿度範囲
運転温度範囲 – 通常運転 -30…+60°C -30…+45°C -30…+45°C -30…+25°C -30…+25°C
運転温度範囲 – 高温時 +60...+73°C, ディレーティング: -0.115 A/°C +45...+75°C, ディレーティング: -0.167 A/°C +45...+77°C, ディレーティング: -0.250 A/°C +25...+77°C, ディレーティング: -0.288 A/°C +25...+50°C, ディレーティング: -0.200 A/°C
保存温度 -40…+85°C -40…+85°C -40…+85°C -40…+85°C -40…+85°C
湿度範囲(結露しないこと) 5…90% 5…90% 5…90% 5…90% 5…90%
機械的データ 機械的データ
質量 約 17 g 約 17 g 約 23 g 約 70 g 約 85 g
寸法 (長さ x 幅 x 高さ) 53.8 x 38.8 x 11.1 mm 53.8 x 38.8 x 11.1 mm 59.5 x 46.0 x 14.1 mm 59.5 x 62.0 x 16.4 mm 90.0 x 56.0 x 29.0 mm
取付 ソケットヘッダ 1.27 mm もしくは M2.5ネジ ソケットヘッダ 1.27 mm もしくは M2.5ネジ ソケットヘッダ 2.54 mm または M2.5ネジ ソケットヘッダ 2.54 mm もしくは M3ネジ M2.5ネジ
型式番号 型式番号
536630 EPOS4 Module 24/1.5 534130 EPOS4 Module 50/5 504384 EPOS4 Module 50/8 504383 EPOS4 Module 50/15 684519 EPOS4 Compact 24/5 EtherCAT
3-axes
オプション(別売) オプション(別売)
309687 DSR 50/5 シャントレギュレータ 309687 DSR 50/5 シャントレギュレータ 235811 DSR 70/30 シャントレギュレータ 235811 DSR 70/30 シャントレギュレータ 235811 DSR 70/30 シャントレギュレータ
オプション製品一覧は578ページ オプション製品一覧は578ページ オプション製品一覧は578ページ オプション製品一覧は578ページ オプション製品一覧は578ページ
5 62 maxon motor control © 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。
motor control
Page19
563
EPOS4 位置制御ユニット データ
EPOS4 Module 24/1.5 EPOS4 Module 50/5 EPOS4 Module 50/8 EPOS4 Module 50/15 EPOS4 Compact 24/5 EtherCAT 3-axes
36/108 Wattまでのブラシ付きDCモータ(エンコ 250 / 750 Wattまでのブラシ付きDCモータ(エン 400 / 1500 Wattまでのブラシ付きDCモータ(エ 750 / 1500 Wattまでのブラシ付きDCモータ(エ 120/360 Wまでのブラシ付きDCモータ(エンコー
ーダ必要)およびブラシレスDCモータ(ホールセ コーダ必要)およびブラシレスDCモータ(ホールセ ンコーダ必要)およびブラシレスDCモータ(ホール ンコーダ必要)およびブラシレスDCモータ(ホール ダ必要)およびブラシレスDCモータ(ホールセンサ
ンサとエンコーダ必要)に対応のOEM位置制御モ ンサとエンコーダ必要)に対応のOEM位置制御モ センサとエンコーダ必要)に対応のOEM位置制御 センサとエンコーダ必要)に対応のOEM位置制御 とエンコーダ必要)に対応した、すぐに接続可能な3
ジュール。 ジュール。 モジュール。 モジュール。 軸コンパクトソリューション。
コントローラバージョン コントローラバージョン
CANopen スレーブ、EtherCATオプション CANopen スレーブ、EtherCATオプション付き CANopen スレーブ、EtherCATオプション付き CANopen スレーブ、EtherCATオプション EtherCAT スレーブ
電気的データ 電気的データ
電源電圧 VCC 10 - 24 VDC 10 - 50 VDC 10 - 50 VDC 10 - 50 VDC 10 - 24 VDC
ロジック電源電圧 VC (オプション) 10 - 24 VDC 10 - 50 VDC 10 - 50 VDC 10 - 50 VDC 10 - 24 VDC
最大出力電圧 0.9 x VCC 0.9 x VCC 0.9 x VCC 0.9 x VCC 0.9 x VCC
最大出力電流 Imax 4.5 A (<30 s) 15 A (<3 s) 30 A (<5 s) 30 A (<60 s) 15 A (<10 s) 軸ごと
最大連続電流 Icont 1.5 A 5 A 8 A 15 A 5 A 軸ごと
スイッチング (PWM) 周波数 100 kHz 50 kHz 50 kHz 50 kHz 50 kHz
PI電流制御周波数 25 kHz (40 µs) 25 kHz (40 µs) 25 kHz (40 µs) 25 kHz (40 µs) 25 kHz (40 µs)
PI回転数制御周波数 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs)
PID位置制御周波数 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs)
最大回転数 (1 磁極ペアモータ) 50 000 rpm (正弦波), 50 000 rpm (正弦波), 50 000 rpm (正弦波), 50 000 rpm (正弦波), 50 000 rpm (正弦波),
100 000 rpm (矩形波) 100 000 rpm (矩形波) 100 000 rpm (矩形波) 100 000 rpm (矩形波) 100 000 rpm (矩形波)
内蔵モータ・チョーク/相 – – – – –
入力 入力
ホールセンサ信号 H1, H2, H3 H1, H2, H3 H1, H2, H3 H1, H2, H3 H1, H2, H3 軸ごと
エンコーダ信号 A, A\, B, B\, I, I\ (最大 6.25 MHz) A, A\, B, B\, I, I\ (最大 6.25 MHz) A, A\, B, B\, I, I\ (最大 6.25 MHz) A, A\, B, B\, I, I\ (最大 6.25 MHz)
センサ信号 A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ 軸ごと
デジタル入力 4 (Logic レベル) 4 (Logic レベル) 4 (Logic レベル) 4 (Logic レベル) 4 (レベル切替可能:Logic/PLC) 軸ごと
デジタル入力 “High-speed” 4, 差動 4, 差動 4, 差動 4, 差動 –
アナログ入力 2 (12-bit-分解能、-10…+10 V) 2 (12-bit-分解能、-10…+10 V) 2 (12-bit-分解能、-10…+10 V) 2 (12-bit-分解能、-10…+10 V) 2 (12-bit-分解能、-10…+10 V) 軸ごと
CAN ID / DEV ID 外部スイッチで設定可能 外部スイッチで設定可能 外部スイッチで設定可能 外部スイッチで設定可能 –
出力 出力
デジタル出力 2 2 2 2 2 軸ごと
デジタル出力 “High-speed” 1, 差動 1, 差動 1, 差動 1, 差動 –
アナログ出力 2 (12-bit-分解能、-4…+4 V, 最大 1 mA) 2 (12-bit-分解能、-4…+4 V, 最大 1 mA) 2 (12-bit-分解能、-4…+4 V, 最大 1 mA) 2 (12-bit-分解能、-4…+4 V, 最大 1 mA) 1 (12-bit-分解能、-4…+4 V, 最大1 mA) 軸ごと
エンコーダ電源 +5 VDC, 最大 70 mA +5 VDC, 最大 70 mA +5 VDC, 最大 70 mA +5 VDC, 最大 70 mA +5 VDC, 最大 100 mA 軸ごと
ホールセンサ電源 +5 VDC, 最大 30 mA +5 VDC, 最大 30 mA +5 VDC, 最大 30 mA +5 VDC, 最大 30 mA +5 VDC, 最大 30 mA 軸ごと
補助電源 +5 VDC, 最大 145 mA +5 VDC, 最大 145 mA +5 VDC, 最大 145 mA +5 VDC, 最大 145 mA –
インターフェース インターフェース
CAN high; low (最大 1 Mbit/s) high; low (最大 1 Mbit/s) high, low (最大 1 Mbit/s) high; low (最大 1 Mbit/s) –
EtherCAT 581245 EPOS4 EtherCAT Card(別途必要) 581245 EPOS4 EtherCAT Cardでのオプション 581245 EPOS4 EtherCAT Card(別途必要) 581245 EPOS4 EtherCAT Card(別途必要) 100 Mbit/s (Full Duplex)
RS232 RxD, TxD (最大 115 200 bit/s) RxD, TxD (最大 115 200 bit/s) RxD, TxD (最大 115 200 bit/s) RxD, TxD (最大 115 200 bit/s) –
USB 2.0/3.0 Data+, Data- (Full Speed) Data+, Data- (Full Speed) Data+, Data- (Full Speed) Data+, Data- (Full Speed) Data+, Data- (Full Speed) 軸ごと
ステータス表示 ステータス表示
LED 緑 = READY, 赤 = ERROR 緑 LED, 赤 LED 緑 LED, 赤 LED 緑 LED, 赤 LED 緑 LED, 赤 LED 緑 LED, 赤 LED
周囲温度/湿度範囲 周囲温度/湿度範囲
運転温度範囲 – 通常運転 -30…+60°C -30…+45°C -30…+45°C -30…+25°C -30…+25°C
運転温度範囲 – 高温時 +60...+73°C, ディレーティング: -0.115 A/°C +45...+75°C, ディレーティング: -0.167 A/°C +45...+77°C, ディレーティング: -0.250 A/°C +25...+77°C, ディレーティング: -0.288 A/°C +25...+50°C, ディレーティング: -0.200 A/°C
保存温度 -40…+85°C -40…+85°C -40…+85°C -40…+85°C -40…+85°C
湿度範囲(結露しないこと) 5…90% 5…90% 5…90% 5…90% 5…90%
機械的データ 機械的データ
質量 約 17 g 約 17 g 約 23 g 約 70 g 約 85 g
寸法 (長さ x 幅 x 高さ) 53.8 x 38.8 x 11.1 mm 53.8 x 38.8 x 11.1 mm 59.5 x 46.0 x 14.1 mm 59.5 x 62.0 x 16.4 mm 90.0 x 56.0 x 29.0 mm
取付 ソケットヘッダ 1.27 mm もしくは M2.5ネジ ソケットヘッダ 1.27 mm もしくは M2.5ネジ ソケットヘッダ 2.54 mm または M2.5ネジ ソケットヘッダ 2.54 mm もしくは M3ネジ M2.5ネジ
型式番号 型式番号
536630 EPOS4 Module 24/1.5 534130 EPOS4 Module 50/5 504384 EPOS4 Module 50/8 504383 EPOS4 Module 50/15 684519 EPOS4 Compact 24/5 EtherCAT
3-axes
オプション(別売) オプション(別売)
309687 DSR 50/5 シャントレギュレータ 309687 DSR 50/5 シャントレギュレータ 235811 DSR 70/30 シャントレギュレータ 235811 DSR 70/30 シャントレギュレータ 235811 DSR 70/30 シャントレギュレータ
オプション製品一覧は578ページ オプション製品一覧は578ページ オプション製品一覧は578ページ オプション製品一覧は578ページ オプション製品一覧は578ページ
© 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。 maxon motor control 563
motor control
Page20
564
EPOS4 位置制御ユニット データ
USB GUI
EPOS4 Compact 24/1.5 CAN EPOS4 Compact 24/1.5 EtherCAT EPOS4 Compact 50/5 CAN EPOS4 Compact 50/5 EtherCAT EPOS4 Compact 50/8 CAN
36/108 Watt までのブラシ付きDCモータ(エンコ 36 / 108 Wattまでのブラシ付きDCモータ(エンコ 250 / 750 Wattまでのブラシ付きDCモータ(エン 250 / 750 Wattまでのブラシ付きDCモータ(エン 400 / 1500 Wattまでのブラシ付きDCモータ(エ
ーダ必要)およびブラシレスDCモータ(ホールセン ーダ必要)およびブラシレスDCモータ(ホールセン コーダ必要)およびブラシレスDCモータ(ホールセ コーダ必要)およびブラシレスDCモータ(ホールセ ンコーダ必要)およびブラシレスDCモータ(ホール
サとエンコーダ必要)に対応の、すぐに接続できる サとエンコーダ必要)に対応の、すぐに接続できる ンサとエンコーダ必要)に対応の、すぐに接続でき ンサとエンコーダ必要)に対応の、すぐに接続でき センサとエンコーダ必要)に対応の、すぐに接続で
コンパクトなソリューション。 コンパクトなソリューション。 るコンパクトなソリューション。 るコンパクトなソリューション。 きるコンパクトなソリューション。
コントローラバージョン コントローラバージョン
CANopen スレーブ EtherCAT スレーブ CANopen スレーブ EtherCAT スレーブ CANopen スレーブ
電気的データ 電気的データ
電源電圧 VCC 10 - 24 VDC 10 - 24 VDC 10 - 50 VDC 10 - 50 VDC 10 - 50 VDC
ロジック電源電圧 VC (オプション) 10 - 24 VDC 10 - 24 VDC 10 - 50 VDC 10 - 50 VDC 10 - 50 VDC
最大出力電圧 0.9 x VCC 0.9 x VCC 0.9 x VCC 0.9 x VCC 0.9 x VCC
最大出力電流 Imax 4.5 A (<30 s) 4.5 A (<30 s) 15 A (<3 s) 15 A (<3 s) 30 A (<5 s)
最大連続電流 Icont 1.5 A 1.5 A 5 A 5 A 8 A
スイッチング (PWM) 周波数 100 kHz 100 kHz 50 kHz 50 kHz 50 kHz
PI電流制御周波数 25 kHz (40 µs) 25 kHz (40 µs) 25 kHz (40 µs) 25 kHz (40 µs) 25 kHz (40 µs)
PI回転数制御周波数 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs)
PID位置制御周波数 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs) 2.5 kHz (400 µs)
最大回転数 (1 磁極ペアモータ) 50 000 rpm (正弦波), 50 000 rpm (正弦波), 50 000 rpm (正弦波整流), 50 000 rpm (正弦波), 50 000 rpm (正弦波),
100 000 rpm (矩形波) 100 000 rpm (矩形波) 100 000 rpm (矩形波) 100 000 rpm (矩形波) 100 000 rpm (矩形波)
内蔵モータ・チョーク/相 94 μH / 1.5 A 100 μH / 1.5 A 9.4 μH / 5 A 10 μH / 5 A 2.2 μH / 15 A
入力 入力
ホールセンサ信号 H1, H2, H3 H1, H2, H3 H1, H2, H3 H1, H2, H3 H1, H2, H3
エンコーダ信号 A, A\, B, B\, I, I\ (最大 6.25 MHz) A, A\, B, B\, I, I\ (最大 6.25 MHz) A, A\, B, B\, I, I\ (最大 6.25 MHz) A, A\, B, B\, I, I\ (最大 6.25 MHz) A, A\, B, B\, I, I\ (最大 6.25 MHz)
センサ信号 A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\
デジタル入力 4 (レベル切替可能:Logic/PLC) 4 (レベル切替可能:Logic/PLC) 4 (レベル切替可能:Logic/PLC) 4 (レベル切替可能:Logic/PLC) 4 (レベル切替可能:Logic/PLC)
デジタル入力 “High-speed” 4, 差動 4, 差動 4, 差動 4, 差動 4, 差動
アナログ入力 2 (12-bit-分解能、-10…+10 V) 2 (12-bit-分解能、-10…+10 V) 2 (12-bit-分解能、-10…+10 V) 2 (12-bit-分解能、-10…+10 V) 2 (12-bit-分解能、-10…+10 V)
CAN ID / DEV ID DIP スイッチ1…5で設定可能 DIP スイッチ1…5で設定可能 DIP スイッチ1…5で設定可能 DIP スイッチ1…5で設定可能 DIP スイッチ1…5で設定可能
出力 出力
デジタル出力 2 2 2 2 2
デジタル出力 “High-speed” 1, 差動 1, 差動 1, 差動 1, 差動 1, 差動
アナログ出力 2 (12-bit-分解能、-4…+4 V, 最大1 mA) 2 (12-bit-分解能、-4…+4 V, 最大1 mA) 2 (12-bit-分解能、-4…+4 V, 最大 1 mA) 2 (12-bit-分解能、-4…+4 V, 最大 1 mA) 2 (12-bit-分解能、-4…+4 V, 最大 1 mA)
エンコーダ電源 +5 VDC, 最大 70 mA +5 VDC, 最大 70 mA +5 VDC, 最大 70 mA +5 VDC, 最大 70 mA +5 VDC, 最大 70 mA
ホールセンサ電源 +5 VDC, 最大 30 mA +5 VDC, 最大 30 mA +5 VDC, 最大 30 mA +5 VDC, 最大 30 mA +5 VDC, 最大 30 mA
補助電源 +5 VDC, 最大 145 mA +5 VDC, 最大 145 mA +5 VDC, 最大 145 mA +5 VDC, 最大 145 mA +5 VDC, 最大 145 mA
インターフェース インターフェース
CAN high, low (最大 1 Mbit/s) – high, low (最大 1 Mbit/s) – high, low (最大 1 Mbit/s)
EtherCAT – 100 Mbit/s (Full Duplex) – 100 Mbit/s (Full Duplex) –
RS232 RxD, TxD (最大 115 200 bit/s) – RxD, TxD (最大 115 200 bit/s) – RxD, TxD (最大 115 200 bit/s)
USB 2.0/3.0 Data+, Data- (Full Speed) Data+, Data- (Full Speed) Data+, Data- (Full Speed) Data+, Data- (Full Speed) Data+, Data- (Full Speed)
ステータス表示 ステータス表示
LED 緑 = READY, 赤 = ERROR 緑 LED, 赤 LED 緑 LED, 赤 LED 緑 LED, 赤 LED 緑 LED, 赤 LED 緑 LED, 赤 LED
周囲温度/湿度範囲 周囲温度/湿度範囲
運転温度範囲 – 通常運転 -30…+45°C -30…+45°C -30…+25°C -30…+25°C -30…+45°C
運転温度範囲 – 高温時 +45...+70°C, ディレーティング: -0.060 A/°C +45...+70°C, ディレーティング: -0.060 A/°C +25...+70°C, ディレーティング: -0.111 A/°C +25...+70°C, ディレーティング: -0.111 A/°C +45...+77°C, ディレーティング: -0.250 A/°C
保存温度範囲 -40…+85°C -40…+85°C -40…+85°C -40…+85°C -40…+85°C
湿度範囲(結露しないこと) 5…90% 5…90% 5…90% 5…90% 5…90%
機械的データ 機械的データ
質量 約 58 g 約 78 g 約 58 g 約 76 g 約 86 g
寸法 (長さ x 幅 x 高さ) 55.0 x 40.0 x 31.1 mm 55.0 x 56.5 x 31.7 mm 55.0 x 40.0 x 31.1 mm 55.0 x 56.5 x 31.7 59.5 x 58.5 x 33.0 mm
取付 M2.5ネジ M2.5ネジ M2.5ネジ M2.5ネジ M2.5ネジ
型式番号 型式番号
546714 EPOS4 Compact 24/1.5 CAN 628092 EPOS4 Compact 24/1.5 EtherCAT 541718 EPOS4 Compact 50/5 CAN 628094 EPOS4 Compact 50/5 EtherCAT 520885 EPOS4 Compact 50/8 CAN
オプション(別売) オプション(別売)
309687 DSR 50/5 シャントレギュレータ 309687 DSR 50/5 シャントレギュレータ 309687 DSR 50/5 シャントレギュレータ 309687 DSR 50/5 シャントレギュレータ 235811 DSR 70/30 シャントレギュレータ
オプション製品一覧は578ページ オプション製品一覧は578ページ オプション製品一覧は578ページ オプション製品一覧は578ページ オプション製品一覧は578ページ
5 64 maxon motor control © 2024 maxon. 無断転載を禁じます。04月版。仕様は変更されることがあります。
motor control