



高性能多軸コントローラを搭載したコンパクトでスマートなモータ
SmartMotorは人間型ロボットを制御できる高性能多軸コントローラを搭載し、
手のひらに納まるコンパクトでスマートなモータです。
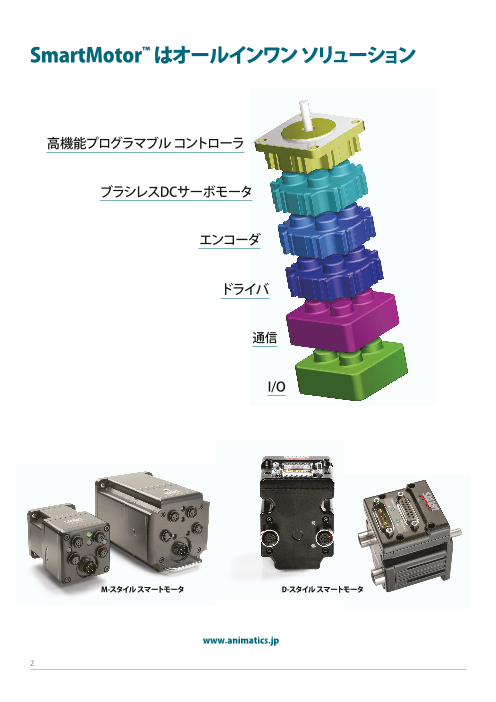
SmartMotor(スマートモータ)は、高性能プログラマブルコントローラ、ブラシレスDCサーボモータ、エンコーダ、ドライバ、通信、I/Oを搭載したオールインワンソリューションです。
このカタログについて
| ドキュメント名 | SmartMotor (スマートモータ) MOOG ANTIMATICS |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 14.1Mb |
| 登録カテゴリ | |
| 取り扱い企業 | トーアメック株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
Class 5 シリーズ
総合カタログ
SmartMotor™は人間型ロボットを制御
できる高機能多軸コントローラ
を搭載し、手のひらに納まる
コンパクトでスマートな
モータです。
Motion is our passion.
www.animatics.jp
Page2
SmartMotor™ はオールインワン ソリューション
高機能プログラマブル コントローラ
ブラシレスDCサーボモータ
エンコーダ
ドライバ
通信
I/O
M-スタイル スマートモータ D-スタイル スマートモータ
www.animatics.jp
2
Page3
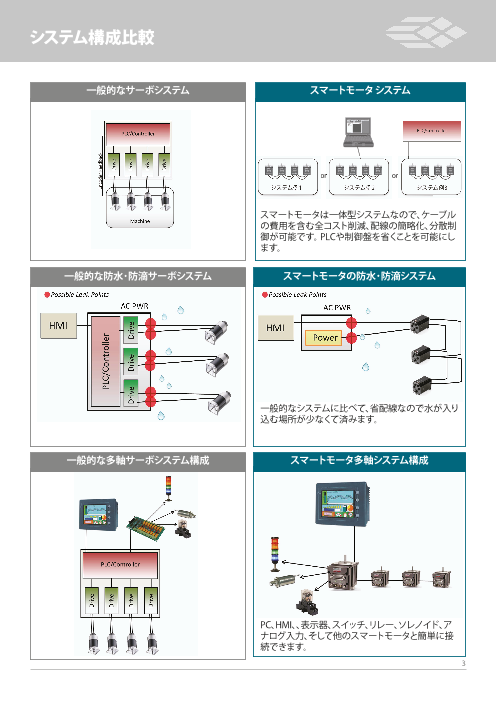
システム構成比較
一般的なサーボシステム スマートモータ システム
スマートモータは一体型システムなので、ケーブル
の費用を含む全コスト削減、配線の簡略化、分散制
御が可能です。 PLCや制御盤を省くことを可能にし
ます。
一般的な防水・防滴サーボシステム スマートモータの防水・防滴システム
一般的なシステムに比べて、省配線なので水が入り
込む場所が少なくて済みます。
一般的な多軸サーボシステム構成 スマートモータ多軸システム構成
PC、HMI、、表示器、スイッチ、リレー、ソレノイド、ア
ナログ入力、そして他のスマートモータと簡単に接
続できます。
3
Page4
機能
高機能プログラマブル コントローラ
スマートモータには高機能プログラマブルコントローラが内蔵されていま
す。この高機能プログラマブルコントローラをメインコントローラとして使用
するか、分散制御のスレーブとして使用することで上位PLCの負荷処理を減
らすことができます。スマートモータはデュアル軌道合成機能を備えてお
り、3次元スプライン補間や単純なPTP動作が可能です。
ブラシレスDCサーボモータ
フレームサイズNEMA17, 23, 34の高性能ブラシレスDCサーボモータを使用
しています。モデルにより異なりますが、速度は3100RPMから10,400RPM、
ピークトルクは0.4N・mから5.4N・mまでのモデルを取り揃えています。
エンコーダ(インクリメンタル方式、アブソリュート方式)
全Class 5スマートモータのエンコーダは型式によりますが、インクリメンタ
ル方式で分解能は4000 counts/rev又は8000 counts/revです。
※アブソリュートエンコーダもモデルにより選択可能です。 必要な場合は当
社正規代理店までお問い合わせください。
ドライバ
閉ループサーボドライバはモータと一体となっています。一体型なので電気
ノイズに影響を受けないと同時に外部に出す電気ノイズも極めて小さいで
す。
通信
Class 5スマートモータはRS232とRS485が標準で装備され、CANopen、デバ
イスネット、プロフィバスはオプションで利用可能です。
※Class 6はEtherCATをオプション選択可能です。
入出力(I/O)
スマートモータは5V I/Oを7点標準で備えており、オプションで絶縁24V I/O
を10点追加できます。デジタル信号とアナログ信号を300mAまで読み込め
るのでPLC、センサー、電磁弁、ポテンショメータ等のデバイスと使用可能で
す。
4
Page5
利点
スマートモータシステム 既存システムにモータの追加が容易
軸数制限(4, 6又は8軸)のあるコントローラ
のような心配をする必要はありません。閉ル
ープ制御のスマートモータであれば必要な
軸数だけ余計なスペースをとることなく追加
可能です。
トータルコストの削減
大きな制御盤と複数の制御ユニットが必要
な一般的なサーボシステムに比べて、ケーブ
ル数、部品数を減らすことが可能になるので
トータルコストを削減します。
上位コントローラの負荷を減らします
スマートモFーleタxibをle使 T用ooすlinるgこ Sとimでpシlifスieテd ムが小型 スマートモータ内のサブルーチンはそれ自身
With SmartMotor でタスクを実行できるので、上位PLCはサブ
例:Flexible Tooling Machine ルーチン指令のみで済みます。コンビトロニ
ックを使用するとスマートモータ間の同期が
可能で、デバイスネットやCANopenと同じバ
スネットワークを使用することも可能です。
一般的なサーボシステムを使用
開発時間の短縮
機械システムが完成する前にスマートモータ
をプログラムして動作確認ができるので、機
械設計時間と開発時間は短縮します。完全一
体型モーション制御は機械設計の簡素化は
機械複製時間の短縮になり複製コストの削
減になります。
トラブル時は迅速な復帰
トラブル時はスマートモータを交換するだけ
なので短時間で機械を復帰できます。
省配線化
スマートモータを多軸で使用する場合「Add-
中央制御Flにeよxiるbl一e 般To的oなlinサgー Mボaシcスhテinムe でwはith配線数が A-Motot」ケーブルを使用すれば省配線が
多く、大きな制御盤が必要 可能です。電源と通信をデイジーチェーンでCentralized Control 接続するので配線費用の削減になります。ま
例:aFlnexdib Cle aTobolilning Mina cahine た、Add-A-Motor ケーブルを使用するとモータは自動で検知し複数のモータにアドレス
Conventional Motion Control System を割り当てることが可能です。
Flexible tooling machines は航空機の翼を支える台座装置です。 詳細はこちらから 各スマートモータをCANバスケーブルでデ
www.animatics.com/applications バイスネット又はCANopenホストとネットワ
ーク接続することも出来ます。
電気ノイズ対策
スマートモータから発生する電気ノイズは極
めて小さいので画像診断が必要な医療装置
や液晶検査装置に使用されています。またマ
ートモータは一体構造なのでエンコーダケー
ブルにノイズがのることで位置精度に問題を
起こすこともありません。
5
Page6
制御能力
基本制御
位置制御: トルク制御:
エンコーダフィードバックによる閉ループ制御 オープンループ制御でモータ巻線に供給する電力を制御
速度制御:
時間と位置に基ずく閉ループ速度制御 パルス列制御(パルス&方向信号入力):
標準的なパルス列信号入力による制御
アドバンス制御機能
フェーズ調整モード: カムモード:
中央に位置する腕のセクションが動作して カムテーブルを作成することで直線補間、スプライン補間された
も腕のエンドエフェクタはベースに平行を維 カム曲線動作が可能です。
持します。
モデューロカウントモード:
ロールオーバーする位置をユーザで設
定できます。例えば回転角45度の位置で
停止した後、270度の位置で停止したい デュアル軌道パス生成:
場合、最短の距離を自動判別し回転、停
止します。 新しく採用したプロセッサにより電子ギヤ/カム制御に位置/速度
制御を合成できるようになりました。
電子ギヤ追加機能:
加えて、内部クロックをw使用したバーチャルカム制御中でも、位
ユーザは上昇、定速、下降を分けて制御できる機能が追加さ 置/速度制御を合成できます。
れました。 Slave
Geared
Velocity
Slew
Ratio
Bit
Trajectory
Bit
Descend
Bit 位置モード
Master Encoder Input over time
軌道⽣成 1
コンビトロニック: 速度モード 軌道合成
補間モード
CAN/DeciceNetネットワークを使用したコンビトロニック技術
はスマートモータを最大120台接続でき、全てのスマートモー
タはマスタコントローラになることが出来ます。 軌道⽣成 2 モータ軸
制御ソース
電⼦ギヤ
0 内部エンコーダ
1 外部エンコーダ
2 バーチャル軸カウンタ 電⼦カム
6
Page7
制御能力
ロータリーインデックステーブル プリント&型抜き
相対位置モード 電子ギヤモード
位置モード
速度モード
Slave
Geared
Velocity
Slew
Ratio
Bit
Trajectory
Bit
Descend
Bit
Master Encoder Input over time
トラバース&巻き取り 張力制御
電子ギヤ+位置モード 電子ギヤモード
位置モード
Slave
Geared 速度モード
Velocity
Slew
Ratio
Bit
Trajectory
Bit
Descend
Bit
Master Encoder Input over time Slave
Geared
Velocity
Slew
Ratio
Bit
Trajectory
Bit
Descend
Bit
Master Encoder Input over time
ドリル&タップ/ナットランナー 平行軸ガントリ
電子ギヤモード
+ 速度モード 補間モード
カムモード
部品振り分け 切断位置の正確位置決めと保持
位置モード 位置モード
ピック&プレース多軸制御 圧入制御
同期位置モード トルクモード
スタッカー 高速パーツカウンター
相対位置モード+絶対位置 速度モード
モード + 入力カウンタ
7
Page8
ソフトウェア
SMI (スマートモータインターフェース) ソフトウェア
SMI™はマイクロソフト社製Windows互換のインターフェースソフ に、複数のモータにアドレスを指定して、モータからプログラムをア
トウェアです。SMIを利用すれば、1~100軸のスマートモータを設 ップロードすることができます。プログラムを作成し、配置されたス
定できます。SMIはターミナルプログラム、プログラムエディタ、ソ マートモータにダウンロードします。そして、再起動させるだけでモ
ースレベルデバッガを備えています。標準のSMIの機能にはPIDチ ータは始動します。
ューニングパラメータ、ステップ応答表示、モータ情報・ダイナミッ
クステータストラッキング、そしてオンラインヘルプと文書作成機 SMI最新版はユーザインターフェースの拡張、新機能を含む機能が追加され、アプリケーションの開発、テスト、運用に役立ちます。
能を備えたツールメニューがあります。プログラムを作成するため
SMI
SMARTMOTOR
I N T E R F A C E
CNCアプリケーション用SMNCソフトウェア
SMNC™は、Gコードをベースにしたサーボコントロールソフトウェ SMNCはRS-232、RS-485及びCANopenを使用してスマートモータ
アで、多軸補間をスマートモータで数値制御します。一般的なCNC と通信します。
装置のインターフェースの画面に類似していることを含め、あらゆ
るCNC装置に匹敵する機能を備えています。SMNCの機能につい
ては、G/Mコードの別表で確認してください。
8
Page9
システム構成例
スマートモータにはマスタ制御機能が標準で搭載されていますので、別置きコントローラがなくてもモーションシ
ステムを構築することが可能です。PCやPLC等の上位コントローラが必要な場合は、コマンド指令やBCD入力で
使用することもできます。
Class 5 単軸接続
I/Oを使用したシステム例 (SmartBox BCDを使用)
RS232通信
電源 24−48VDC
PCからコマンド指令によるシステム例
電源 24−48VDC
I/Oをインターフェースとしたデバイス接続例
RS232通信
Class 5 多軸接続 電源 24−48VDC
Add-A-Motorケーブルを使用したRS232マルチドロップ CANバス Yケーブルを使用したCANバスマルチドロップ
(⼜はスマートモータ)
(⼜はスマートモータ)
※Add-A-Motorケーブルの最大連続負荷許容電流は15Aです。 9
Page10
D-スタイルモータ比較表
★ ベストバリュー
• 全D-スタイルスマートモータはRS232をプライマリ通信ポート 相対トルク比較
として標準装備。 注意1:全トルクデータはダイナモメータで計測し、連続トルク
• 全D-スタイルスマートモータは7チャンネル5VDC TTL 非絶縁 値は平均周囲温度25℃でモータ内部限界温度を85℃上昇
5V I/Oを標準装備。 させた値です。
• 10チャンネル24VDC絶縁I/Oをオプション追加可能。 注意2: 比較表は48VDC電源を使用した値です。異なる電源
• エンコーダ信号出力ピンを用意。 電圧を使用すると値が変わります。
ピークトルク
連続トルク
SM17205D SM23165D SM23165DT SM23375D SM23375DT SM23205D SM23305D
連続トルク N-m 0.24 0.28 0.52 0.32 0.59 0.33 0.45
ピークトルク N-m 0.43 0.45 0.84 0.57 1.11 0.57 0.77
Watts 145 181 204 191 186 226 220
最大連続出力
RPM 6,000 6,500 3,800 6,000 3,250 6,900 4,750
無負荷時最大速度 RPM 7,900 10,400 5,200 8,000 4,000 8,100 5,600
RPM 6,000 6,500 3,800 6,000 3,250 6,900 4,750
連続最大電流
Amps 3.81 3.545 5.074 5.072 4.52 6.02 5.57
RPM 4,200 6,000 3,500 4,750 2,450 6,000 4,000
ピーク電流
Amps 4.69 4.43 5.73 5.829 5.67 8.67 8.18
定電圧 V/krpm 6.506 4.45 9.08 5.62 10.95 6.137 8.873
インダクタンス mH 1.4 0.829 1.31 0.770 0.906 0.40 0.61
エンコーダ分解能 Counts/Rev 4,000 4,000 4,000 4,000 4,000 4,000 4,000
ロータイナーシャ 10-5 Kg-m2 1.5324 0.6991 0.706 1.342 1.342 1.592 2.344
質量 kg 0.55 0.45 0.59 0.95 0.98 0.79 1.03
軸径 mm 5.00 6.35 6.35 6.35 6.35 6.35 6.35
ラジアル荷重(軸) kg 3.18 3.18 3.18 3.18 3.18 3.18 3.18
アキシャル荷重(軸) kg 1.36 1.36 1.36 1.36 1.36 1.36 1.36
DeviceNet オプション Yes Yes Yes Yes Yes Yes Yes
Profi Bus オプション Yes Yes
CANopen オプション Yes Yes Yes Yes Yes Yes Yes
10
Page11
TM
SM23405D SM34165D SM34165DT SM34205D SM34305D SM34405D SM34505D
0.55 1.09 1.45 0.89 1.23 1.46 1.85 N-m 連続トルク
0.91 1.60 3.39 2.81 3.93 4.56 5.44 N-m ピークトルク
253 235 615 324 400 438 527 Watts
最大連続出力
4,500 2,400 4,500 3,750 3,600 3,300 3,100 RPM
5,300 3,100 5,100 4,500 4,100 3,800 3,300 RPM 無負荷時最大速度
4,500 2,400 4,500 3,750 3,600 3,300 3,100 RPM
連続最大電流
6.76 6.02 16.93 8.28 10.31 11.69 14.37 Amps
3,900 1,800 3,500 2,250 2,500 2,450 2,300 RPM
ピーク電流
8.62 6.38 23.86 11.17 17.73 20.71 23.01 Amps
9.612 14.98 8.9 10.8 12.1 12.9 14.049 V/kprm 定電圧
0.49 1.72 0.32 0.596 0.490 0.913 0.871 mH インダクタンス
4,000 8,000 8,000 8,000 8,000 8,000 8,000 Counts/Rev エンコーダ分解能
3.100 9.890 10.031 8.448 12.56 17.02 20.92 10-5 Kg-m2 ロータイナーシャ
1.27 2.27 2.49 1.59 2.04 2.49 2.95 kg 質量
6.35 9.53 12.70 9.53 9.53 9.53 9.53 mm 軸径
3.18 6.80 13.61 6.80 6.80 6.80 6.80 kg ラジアル荷重(軸)
1.36 1.36 1.36 1.36 1.36 1.36 1.36 kg アキシャル荷重(軸)
Yes Yes Yes Yes Yes Yes Yes DeviceNet オプション
Yes Yes Profi Bus オプション
Yes Yes Yes Yes Yes Yes Yes CANopen オプション
11
Page12
ピン配列
D-スタイル M-スタイル
スマートモータ スマートモータ
PIN 主電源 P1 P IN 主電源 P1
1 I/O - 6 GP ⼜は"G"コマンド 1 制御電源⼊⼒ M16, 4ピンオス側
2 +5VDC出⼒ 7W2コンボ 2 シャーシ
3 RS-232送信 D-サブ コネクタ 3 制御/通信/I/O/Amp コモングラウンド
4 RS-232受信 4 ドライバ電源⼊⼒
5 信号グランド PIN 通信コネクタ P2
A1 主電源 1 制御/通信/I/O/Amp コモングラウンド M12, 8ピン
A2 グラウンド 2 RS-485 B, チャンネル0 メス側
PIN コネクタ P2 3 RS-485 A, チャンネル0
1 I/O-0 GP⼜はEnc. A相⼜はパルス列⼊⼒ 4 エンコーダA+ ⼊⼒/出⼒
2 I/O-1 GP⼜はEnc. B相⼜は方向⼊⼒ 5 エンコーダB- ⼊⼒/出⼒
3 I/O-2 GP⼜は正方向トラベルリミット
DB-15 Dサブ 6 エンコーダA- ⼊⼒/出⼒
4 I/O-3 GP⼜は負方向トラベルリミット
コネクタ 7 +5V出⼒
5 I/O-4 GP⼜はRS-485 A チャンネル(1) 8 エンコーダB+ ⼊⼒/出⼒
6 I/O-5 GP⼜はRS-485 B チャンネル(1) PIN 24V 絶縁I/O P3
7 I/O-6 GP⼜は"G"コマンド 1 I/O ‒ 0 GP
8 A相エンコーダ出⼒ 2 I/O ‒ 1 GP M12, 12ピン
9 B相エンコーダ出⼒ 3 I/O ‒ 4 GP メス側
10 RS-232 送信 4 I/O ‒ 5 GP
11 RS-232 受信 5 I/O ‒ 6 GP
12 +5VDC出⼒ 6 I/O ‒ 7 GP
13 信号グラウンド 7 I/O ‒ 8 GP ⼜はブレーキライン
14 グラウンド 8 I/O ‒ 9 GP
15 主電源 9 Not Fault Out
PIN CANバス P3 10 ドライバ有効⼊⼒
1 NC M12 5-ピン 11 +24VDC出⼒
2 NC メス側 12 グラウンドコモン
3 GND_CAN PIN オーバートラベルリミットコネクタ P4
4 CAN-H 1 +24VDC出⼒ M12, 5ピン
5 CAN-L 2 -リミット(⼊⼒ 7) メス側
3 コモングラウンド
4 +リミット(⼊⼒6)
PIN 絶縁24V I/O コネクタ P4
5 ⼊⼒8
1 IO ‒ 16 GP
2 IO ‒ 17 GP M12-12ピン PIN CANバス P5
3 IO ‒ 18 GP メス側
1 NC M12, 5ピン
4 IO ‒ 19 GP
2 NC メス側
5 IO ‒ 20 GP
3 グラウンド
6 IO ‒ 21 GP
4 CAN-H
7 IO ‒ 22 GP
5 CAN-L
8 IO ‒ 23 GP
9 IO ‒ 24 GP
10 IO ‒ 25 GP
11 +24VDC ⼊⼒
12 GND-I/O
12
Page13
スマートモータ型式
D-スタイル スマートモータ型式
M-スタイル スマートモータ型式
注意:モデルによってはオプション選択ができない場合があります。オプション選択が必要な場合は、当社または正規代理店にご確認ください。
13
Page14
産業&アプリケーション
CNC 機械 巻線
• 金属加工 • 光ファイバー
• 接着剤塗布 • 紙、フィルム&フォイル
• 画像検査 • ボイスコイル、トランスコイル、誘導コイル
• 炭素繊維
航空宇宙 医療
• 翼加工用台座 • カテーテル製造 & 巻線
• 衛星位置制御 • 非破壊試験
• 炭素繊維配置装置 • 薬品検査
• 遠心分離機
包装 半導体
• キャッパー • ピックアンドプレース
• ラベリング • メタライザー
• ブリスターパック • プラズマコーティング
• フィード&シーリング
他の産業
• 建築 • 生物 • 海洋科学 • 医薬
• 農業 • 化学 • 金属&素材 • 品質検査
• 芸術&ニューメディア • 教育 • 防衛 • セキュリティー
• 自動車 • エンターテイメント • 原子力 • 計測
• 自動運転 • 生命科学 • 石油 • 木工加工
14
Page15
コンビトロニック通信
CANOpen 又はDeviceNetを使用した多軸通信
コンビトロニックは簡単なコードを書くことで高性能多軸制御を可能にします。CAN/DeviceNetを使用したコンビトロニックは、全モータ(
コントローラ)の全ての情報を共有することが出来るので、強力なパラレル処理が可能なシステムとなります。各モータは全てのモーション
パラメータや他のモータのI/Oにもアクセス可能なので、プログラマはコントロールボード1台のイメージで使用できます。
コード例:制御指令はコロンの後にモータアドレスを付けます。
PT=4000 ʻローカルモータ内に到達位置を設定
モータ1 モータ2 モータ3
PT:3=4000 ʻモータ3に到達位置を設定
PT:0=4000 ʻ全モータに到達位置を設定
a:2=IN(0):3 ʻモータ2の変数内に3のI/Oを設定
プログラム例のように、コンビトロニックを使用するとモータが3台ネットワ
ークで繋がっていても、マスタモータ(モータ1)だけにプログラムを書け コンビトロニック コンビトロニック コンビトロニックマスタ スレーブ スレーブ
ば、他の2台の状況が把握できるので容易に制御することができます。
コード例:モータ1は他の2台のデータと比較しを必要とする場合。
IF (PA:1>PA:2) & (VA:3<2000)
PRINT(“Motor 1 has passed Motor 2 and Motor 3 has slowed down”)
ʼモータ1はモータ2を追い越し、モータ3の速度が指定速度2000よりスローダウンした場合。̓
ENDIF
コンビトロニックを使用した同期制御
コード例:ホストPC/PLCを必要とせずに直線補間制御が可能です。
ADTS=100 ʻ同期指令加速度を設定
VTS=100000 ʻ同期指令到達速度を設定
PTS (30000;1,4000;2) ʻモータ1と2の到達位置を設定
GS ʻスタート、同期開始
TSWAIT ʻ同期制御完了するまでプログラム実行待機
15
Page16
Dスタイル仕様
70 (0.494) 210
Peak Power
60 (0.424) 180
Peak Torque
Continuous Power
SM23165D 50 (0.353) 150
40 (0.282) 120
連続トルク@48V 0.28 N-m Continuous Torque 48VDC電源使用時
30 (0.212) 90
ピークトルク 0.45 N-m 20 (0.141) 60
最大連続出力@6500 RPM 181 Watt 10 (0.071) 30
0 0
無負荷時最大速度 10,400 RPM 0 1 2 3 4 5 6 7 8 9 10 11
kRPM
連続最大電流* @ 6500 RPM 3.545 Amps 80 (0.565) 200
Peak Power 180
ピーク電流@ 6000 RPM 4.43 Amps 70 (0.494) Peak Torque 160
60 (0.424)
定電圧 4.45 V/kRPM 14050 (0.353)
120
Continuous Torque
インダクタンス 0.829 mH 40 (0.282) 42VDC電源使用時100Continuous Power
30 (0.212) 80
エンコーダ分解能 4,000 Counts/Rev 6020 (0.141)
40
ロータイナーシャ 0.6991 10-5 Kg-m2 10 (0.071) 20
0 0
質量 0.45 kg 0 1 2 3 4 5 6 7 8 9 10 11
kRPM
軸径 6.35 mm 80 (0.565) 200
70 (0.494) 180
ラジアル荷重(軸) 3.18 kg 160
60 (0.424)
Peak Torque 140
アキシャル荷重(軸) 1.36 kg 50 (0.353) 120
40 (0.282) 24 VDC電源使用時
DeviceNet オプション Yes 100Continuous Torque
30 (0.212) 80
Peak Power
Profi Bus オプション Yes 6020 (0.141)
40
10 (0.071) Continuous Power
注:連続トルクカーブは周囲温度
CANopen オプション Yes 20 25℃の条件で、モータ内部温度が
0 0 限界値の85℃まで上昇した計測値
0 1 2 3 4 5 6 7 8 9 10 11 です。計測にはTrap-コミュテーショ
kRPM ンモードを使用しています。
SM2316DT-PLS2 Torque vs. Speed
w/PWR 48V 10A Switching
120 (0.847) 240
Peak Torque Peak Power
100 (0.706) 200
80 (0.565) Continuous Torque 160
SM23165DT
60 (0.424) 120 48VDC電源使用時
er
連続トルク@48V 0.52 N-m Pow40 (0.282) suou 80
on
tin
C
ピークトルク 0.84 N-m 20 (0.141) 40
最大連続出力@3800RPM 204 Watt 0 00 1 2 3 4 5 6
kRPM
無負荷時最大速度 5,200 RPM SM2316DT-PLS2 Torque vs. Speed
w/PS42V20AF110
連続最大電流* @ 3800RPM 5.074 Amps 120 (0.847) Peak Torque 240
100 (0.706) 200
ピーク電流 @ 3500 RPM 5.73 Amps Peak Power
80 (0.565) 160
定電圧 9.08 V/kRPM Continuous Torque 42VDC電源使用時
60 (0.424) 120
r
we
エンコーダ分解能 4,000 Counts/Rev Po40 (0.282) suou 80
ntin
Co
ロータイナーシャ 0.706 10-5 Kg-m2 20 (0.141) 40
0 0
質量 0.59 kg 0 1 2 3 4 5 6
kRPM
軸径 6.35 mm
SM2316DT-PLS2 Torque vs. Speed
w/ PS24V8AG-110
ラジアル荷重(軸) 3.18 kg 120 (0.847) Peak Torque 240
アキシャル荷重(軸) 1.36 kg 100 (0.706) 200
DeviceNet オプション Yes 80 (0.565) 160Continuous 24 VDC電源使用時Torque
60 (0.424) 120
Profi Bus オプション Yes
40 (0.282) Peak Power 80
CANopen オプション Yes rowe20 (0.141) s Pu 40o
nti
nu
0 C
o
0
0 1 2 3 4 5 6 注:連続トルクカーブは周囲温度
kRPM 25℃の条件で、モータ内部温度が
限界値の85℃まで上昇した計測値
です。計測にはTrap-コミュテーショ
ンモードを使用しています。
0.810
[20.57]
2.250 0.062 2.30
[57.15] [1.57] [58.42]
0.205 [5.2] DIA THRU (4X)
ON 2.625 [66.675] DIA B.C.
EQUALLY SPACED
3.050
[77.47]
2.250
[57.15]
0.2498 ±0.0002
[ 6.34 ±0.0051 ]
1.5+0.0
–.002 0.250
[38.1+0.0 [6.35]
–.005]
16
Torque oz-in (Nm) Torque oz-in (Nm) Torque oz-in (Nm) Torque oz-in (Nm) Torque oz-in (Nm) Torque oz-in (Nm)
Power (Watts) Power (Watts) Power (Watts)
Power (Watts) Power (Watts) Power (Watts)
SM23165D SM23165DT
Page17
Dスタイル仕様
SM34165D
連続トルク@48V 1.09 N-m
ピークトルク 1.60 N-m
最大連続出力@2400 RPM 235 Watt SM3416D-PLS2 Torque vs. Speedw/ PWR 48V28A Switching
250 (1.765) Peak Power 270
無負荷時最大速度 3,100 RPM Peak Torque
200 (1.412) 216
連続最大電流* @ 2400 RPM 6.021 Amps Continuous Torque
150 (1.059) 162 48VDC電源使用時
ピーク電流 @ 1800 RPM 6.38 Amps er
100 (0.706) Po
w 108
s
定電圧 14.98 V/kRPM ountinu
Co
50 (0.353) 54
インダクタンス 1.72 mH
0 0
0 0.5 1 1.5 2 2.5 3 3.5
エンコーダ分解能 8,000 Counts/Rev kRPM
ロータイナーシャ 9.890 10-5 Kg-m2 SM3416D-PLS2 Torque vs. Speedw/ PS42V20AF110
250 (1.765)
質量 2.27 kg Peak Torque
270
200 (1.412) Peak Power 216
軸径 9.53 mm
Continuous Torque
150 (1.059) 162
ラジアル荷重(軸) 6.80 kg 42VDC電源使用時r
we
100 (0.706) Po 108
アキシャル荷重(軸) 1.36 kg ousinut
Co
n
50 (0.353) 54
DeviceNet オプション Yes
0 0
Profi Bus オプション Yes 0 0.5 1 1.5 2 2.5 3 3.5
kRPM
CANopen オプション Yes
SM3416D-PLS2 Torque vs. Speed
w/4x PS24V8AG-110
1.1750 250 (1.765) Peak Torque 270
[29.84] 0.0625
[1.59]
200 (1.412) 216
150 (1.059) 162 24 VDC電源使用時
Continuous Torque
100 (0.706) Peak Power 108
er
50 (0.353) w
s P
o 54
uo
u
n
0.21 3.54 tiCo
n
[5.37] [90.01] 0 0
0 0.5 1 1.5 2 2.5 3 3.5
kRPM
2.875 +0.0 Ø0.375 +0.0000 -0.0005
–.002 4.15
[73.025 +0.0 [9.525 +0.000 -0.127] [105.40]
3.40 –.0508
4.00 注:連続トルクカーブは周囲温度
[101.60]
[86.36] 25℃の条件で、モータ内部温度が
限界値の85℃まで上昇した計測値
です。計測にはTrap-コミュテーショ
ンモードを使用しています。
0.220 ±0.01DIA THRU (4X)
[5.588±0.254]
ON 3.876 [98.45] DIA B.C. 3.75 3.40
EQUALLY SPACED [95.12] [86.36]
SM3416DT-PLS2 Torque vs. Speed
SM34165DT w/ PWR 48V28A Switching
500 (3.531) 1000
Peak Torque Peak Power
連続トルク@48V 1.45 N-m
400 (2.825) 800
ピークトルク 3.39 N-m
300 (2.118) 600 48VDC電源使用時
最大連続出力@4500 RPM 615 Watt Continuous Torque200 (1.412) 400
無負荷時最大速度 5,100 RPM ower100 (0.706) us P 200
onti
nuo
連続最大電流* @ 4500 RPM 16.93 Amps C0 0
0 1 2 3 4 5 6
ピーク電流 @ 3500 RPM 23.86 Amps kRPM
定電圧 8.9 V/kRPM SM3416DT-PLS2 Torque vs. Speedw/ PS42V20AF110
500 (3.531) 1000
エンコーダ分解能 8,000 Counts/Rev Peak Torque
400 (2.825) 800
ロータイナーシャ 10.031 10-5 Kg-m2
300 (2.118) Peak Power 600
質量 2.49 kg Continuous Torque 42VDC電源使用時
200 (1.412) 400
軸径 12.70 mm r Powe
100 (0.706) suou 200
ont
in
ラジアル荷重(軸) 13.61 kg C
0 0
0 1 2 3 4 5 6
アキシャル荷重(軸) 1.36 kg kRPM
DeviceNet オプション Yes SM3416DT-PLS2 Torque vs. Speedw/4x PS24V8AG-110
500 (3.531) 1000
Profi Bus オプション Yes Peak Torque
400 (2.825) 800
CANopen オプション Yes
300 (2.118) 600 24 VDC電源使用時
1.1750 Continuous Torque
[29.84] 200 (1.412) 400
0.0625 Peak Power
[1.59]
100 (0.706) owe
r 200
s Pu
tinu
o
Con 注:連続トルクカーブは周囲温度
0 0
0 1 2 3 4 5 6 25℃の条件で、モータ内部温度が
kRPM 限界値の85℃まで上昇した計測値
です。計測にはTrap-コミュテーショ
ンモードを使用しています。
0.21 3.54
[5.37] [90.01]
Ø0.4998 +0.0000 -0.0005 4.15
[73.025 ±0.051] [12.694 +0.000 -0.127] [105.40]
4.00
3.40 [101.60]
[86.36]
0.223 [5.66] DIA THRU (4X)
ON 3.876 [98.45] DIA B.C. 3.75 3.40
EQUALLY SPACED [95.12] [86.36] 17
Torque oz-in (Nm) Torque oz-in (Nm) Torque oz-in (Nm) Torque oz-in (Nm) Torque oz-in (Nm) Torque oz-in (Nm)
Power (Watts) Power (Watts) Power (Watts)
Power (Watts) Power (Watts) Power (Watts)
SM34165D SM34165DT
Page18
Mスタイル仕様
SM23165MT MDE Torque vs.
Speed W/ PFC1500W-48V
SmartMotor™ Series SM23165MT 300
160
Peak Power
連続トルク @ 48V 0.48 N-m Peak Torque
140 250
ピークトルク 1.07 N-m
120
最大連続出力@3700 RPM 189 Watt 200
100
無負荷時最大速度 5,000 RPM 48VDC150
80 電源使用時
連続最大電流* @ 3700 RPM 6.4 Amps
60 Continuous Torque
ピーク電流 @ 360 RPM 14.6 Amps 100
wer
40 Po
定電圧 9.6 V/kRPM us uo
ont
in 50
インダクタンス 1.31 mH 20 C
エンコーダ分解能 4,000 Counts/Rev 0 0
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5
ロータイナーシャ 0.706 10-5 Kg-m2 Speed (krpm)
質量 0.68 kg SM23165MT MDE Torque vs.
Speed W/ 3x PS42V20AF110
軸径 9.53 mm
200 250
ラジアル荷重(軸) 6.80 kg
180
アキシャル荷重(軸) 1.36 kg 160 Peak Power 200
Peak Torque
DeviceNet ファームウェアオプション 140
Profi Bus 120 150
42VDC
CANopen 標準 100 電源使用時
80 100
※Mスタイルはアブソリュートエンコーダタイプを選択可能です。ご希望の場
60 Continuous Torque
合は代理店にお問い合わせください。 wer
40 us
Po 50
ntin
uo
20 Co
0 0
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
SM231S65pMeT eMdD E( kTorrpqmue )v s. Speed
W/ 3x PS24V8A-110G
100
140
Peak Torque Peak Power 90
120 80
70
100
60
80 24 VDC
IP65 50 電源使用時Contin60 uous Torque 40
we
r
30
40 o
us
P
o
tin
u 20
20 onC 10
0 0
0 0.5 1 1.5 2 2.5 3
Speed (krpm)
注:連続トルクカーブは周囲温度
25℃の条件で、モータ内部温度が
限界値の85℃まで上昇した計測値
です。計測にはTrap-コミュテーショ
ンモードを使用しています。
.0948+.0020- .0000 2.41
+0.05
0.00
.053+.005 1.34+0.13 CANOPEN CANOPEN- .000 0.00 RUN LED ERROR LED
ANSI WOODRUFF
KEYSEAT #303
4X .20 5.1 THRU 1.498±.001 38.05±0.03 1.00 25.4
ON 2.625 [66.68] B.C.
EQUALLY SPACED LED.06 1.5 B SERVO-AMPLIFIER
A NOTE #2
ANSI WOODRUFF
KEY# 303 LED .70 17.8
TRAJECTORY
NOTE #2
2.30 58.4
D .50 12.7
C
.3748+.0000 9.520 0.000- .0003 -0.008
.60 15.2
1.30 33.0
2.30 58.4 .32 8.0 E
3.53 89.6
18
Torque oz-in (Nm) Torque oz-in (Nm) Torque oz-in (Nm)
Power (Watts) Power (Watts) Power (Watts)SM23165MT
Page19
Mスタイル仕様
SM34165MT MDE Torque vs.
Speed W/ PFC1500W-48
600 1398
SmartMotor™ Series SM34165MT-IP
連続トルク @ 48V 0.99 N-m 500 1165
Peak Torque Peak Power
ピークトルク 3.94 N-m
400 932
最大連続出力@4500 RPM 472 Watt
無負荷時最大速度 4,900 RPM 300 699 48VDC
電源使用時
連続最大電流* @ 4500 RPM 13 Amps
ピーク電流 @ 2700 RPM 32 Amps 200 466Continuous Torque
定電圧 9.8 V/kRPM 100
s Powe
r 233
インダクタンス 0.315 mH Continuou
エンコーダ分解能 8,000 Counts/Rev 0 00 1 2 3 4 5
ロータイナーシャ 10.031 10-5 Kg-m2 Speed (krpm)
SM34165MT MDE Torque vs. Speed
質量 2.72 kg W/ PS42V20A
軸径 12.70 mm
600 900
ラジアル荷重(軸) 13.61 kg
Peak Power
アキシャル荷重(軸) 1.36 kg 500 750
Peak Torque
DeviceNet ファームウェアオプション
400 600
Profi Bus Available
42VDC
CANopen 標準 300 450 電源使用時
※Mスタイルはアブソリュートエンコーダタイプを選択可能です。ご希望の場
合は代理店にお問い合わせください。 200 Continuous T 300orque
wer
Po
100 nuo
us
ti 150
Con
0 0
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5
Speed (krpm)
SM34165MT MDE Torque vs.
Speed W/ PS24V8AG-110
500 400
Peak Torque
450 360
Peak Power
400 320
350 280
300 240
IP65 24 VDC250 Continuous Torque 200 電源使用時
200 160
we
r
150 o 120
us
P
o
100 tin
u
n 80
Co
50 40
0 0
0 0.5 1.0 1.5 2.0 2.5 3.0
Speed (krpm)
注:連続トルクカーブは周囲温度
25℃の条件で、モータ内部温度が
限界値の85℃まで上昇した計測値
です。計測にはTrap-コミュテーショ
ンモードを使用しています。
19
Torque oz-in (Nm) Torque oz-in (Nm) Torque oz-in (Nm)
Power (Watts) Power (Watts) Power (Watts)SM34165MT
Page20
日本
〒180-0004 東京都武蔵野市吉祥寺本町1-20-1
吉祥寺永谷シティプラザ4F
Tel 0422-20-1251
Fax 0422-27-2764
United States
1421 McCarthy Boulevard
Milpitas, CA
95054 USA
Tel +1 (408) 965 3320
Fax +1 (408) 748 8725
Germany
In der Neuen Welt 8 / G5-G8
87700 Memmingen
Germany
Tel +49 8331 98480-0
Fax +49 8331 98480-29
Eメールによるお問合わせはこちらへ
service@animatics.com.
スマートモータのことをもっと知りたいという方はホームページ
にアクセス www.animatics.jp
詳細カタログをご希望の方は当社正規代理店にお問い合わせく
ださい。
© 2014 Moog Animatics. SmartMotor is a trademark of Moog Animatics.