Strictly Confidential
ロボット製造業向け
3次元挙動計測システム導⼊事例
エースポイントシステムズ株式会社
acepoint Inc.
アジェンダ
1. 主製品、ソフトウェアのご紹介
2. モーションキャプチャー(3次元挙動計測システム)とは︖
3. こういう⽅必⾒のシステム
4. 計測の流れ
5. 機器構成
6. 事例内容紹介
7. 動画リンク先紹介
8. 活⽤事例 3パターン
9. 参考(システムの精度について)
acepoint Inc. 1
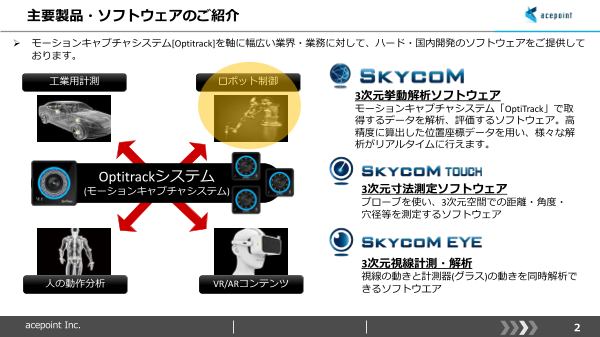
主要製品・ソフトウェアのご紹介
Ø モーションキャプチャシステム[Optitrack]を軸に幅広い業界・業務に対して、ハード・国内開発のソフトウェアをご提供して
おります。
⼯業⽤計測 ロボット制御
3次元挙動解析ソフトウェア
モーションキャプチャシステム「OptiTrack」で取
得するデータを解析、評価するソフトウェア。⾼
精度に算出した位置座標データを⽤い、様々な解
析がリアルタイムに⾏えます。
Optitrackシステム
(モーションキャプチャシステム) 3次元⼨法測定ソフトウェア
プローブを使い、3次元空間での距離・⾓度・
⽳径等を測定するソフトウェア
3次元視線計測・解析
⼈の動作分析 視線の動きと計測器(グラス)の動きを同時解析で
VR/ARコンテンツ きるソフトウエア
acepoint Inc. 2
モーションキャプチャー(3次元挙動計測)システムとは︖
Ø 主にカメラ、マーカー、校正冶具の3つを⽤いて、三⾓測量の原理でカメラで囲んだ空間内の3次元座標を計測いたします。
3次元座標取得の原理 主な機材
カメラ
カメラには⾚外線を発光する強⼒なストロボライト
が内蔵されており、複数台(最低で3台)で三⾓測
量の原理で計測対象点の3次元座標を⾼精度に取得
します。
エピポーラマッチング
反射マーカー
真球加⼯された球体に受けた光を直線で反射させる
塗料(再帰性反射材)が塗られており、カメラはこ
の反射マーカーの座標を取得します。
⼤きさは3mmから200mmから、シールや半球タイプ
のものもございます。
計測までのSTEP
校正器
カメラの互いの位置と⾓度を定義するためのツール
カメラ です。素材はインバーという剛性⾦属を使⽤し、温
カメラ設置 キャリブ 度の変化の影響を受けにくい設計がされ、マーカー
画⾓調整 レーション 計測実施 の位置がミクロン単位で校正されているため、キャ
リブレーションをより⾼精度に⾏えます。
acepoint Inc. 3
こういう⽅必⾒のシステムです
• 複数台のロボットを⼀度に計測したい
• 溶接ロボットの挙動を確認、先端位置を補正したい
• ロボット位置情報をリアルタイムに取り出したい
• 搬送機やフォークリストの基礎データを計測したい
• ワイヤレスで3次元測定を⾏いたい
acepoint Inc. 4
計測の流れ
①計測対象を複数台のカメラで囲み、計測空間を構築しま ②「キャリブレーション」でカメラの位置関係と計測空間を
す。 定義します。(原点の設定も⾏う)
キャリブレーションに使⽤する
『キャリブレーションワンド』
④計測空間内の反射マーカーの位置をカメラが捉え、 ③計測対象の計測したい箇所に、⾚外光を反射す
3次元座標値がリアルタイムに算出されます。 る塗料の塗られた反射マーカーをつけます。
マーカは球体からシール状の
ものまで様々形状のものがあ
ります。
acepoint Inc. 5
機器構成図 例
⾚字は不明箇所
同期信号 …
BNC OptiTrack eSync2
アクチュエータ、荷重 (同期Box) OptiTrack Camera
データ
電源&制御 電源&データ
Ethernet PoE ハブ Ethernet
データ PC データ
National Instruments Ethernet
東京測器 DAQ(データ収集装置)
TDSシリーズ データ Motive Takeファイル
USB ・モーキャプデータ
※オプション ・変位計
スキャニング開始と共に+5V/ ・荷重計
33ms の正パルス信号を出⼒
計測対象 OptiTrack Motive CSV 出⼒
CSVファイル
SKYCOM 解析ソフト
acepoint Inc. 6
事例 ロボット精度確認⽤、位置制御ツール
溶接/プレス機挙動/ロボット制御
acepoint Inc. 7
事例 溶接ロボットの繰り返し精度確認、先端部の挙動計測
アーク光の影響を受けることなく計
測が可能
剛体設定をすることで、回転や⾓度、
姿勢などが解析できます。
トーチ部分は事前にマーカーを貼り、
位置関係を憶えさすことで、仮想点
として計測を可能にしております。
acepoint Inc. 8
事例 ドローンの制御ツールとして
座標値はリアルタイムで、外部に吐
き出しができますので、フィード
バック制御も容易。
Python、LabViwe、Matlab、C⾔語、
ドローン。同時に何台でも計測する ROSなどのサンプルコードご⽤意
ことができます。
acepoint Inc. 9
事例③︓物流•搬送
⼤型対象/制御/挙動
acepoint Inc. 10
事例 建機のアーム挙動計測
アームの先端挙動を計測。初動動作や停
⽌時の挙動を可視化した カメラは⾞載で設置
acepoint Inc. 11
事例 フォークリフトの挙動、制御
位置データをリアルタイムで出⼒し、
フィードバック制御可能。
⾃動運転に向けた、位置計測の基礎
データ取り
座標をリアルタイムで取得
acepoint Inc. 12
事例︓ティーチング
ワークレス、先端補正
acepoint Inc. 13
事例 ティーチング
ターゲットマーカーを持った⼈の動きに合わせ
てロボットを動作させることが可能
ロボットの遠隔操作、ペン
ダントレスでティーチ可能
主に下肢全体、メインでペダリングまで計測。
狭い空間でもカメラに映る範囲であれば、計測
が可能
acepoint Inc. 14
事例 ティーチング
ワークがなくてもCAD情報があれば、
ティーチ可能
先端位置を⾃動補正
acepoint Inc. 15
動画リンク先紹介
実際の動画はこちら
挙動計測
https://youtu.be/wdK_cbVuykg
robot制御
https://youtu.be/lDGMqpBY2m4
acepoint Inc. 16
動画リンク先紹介
実際の動画はこちら
ティーチング
https://youtu.be/eKi_XYqeYno
acepoint Inc. 17
導⼊効果①設備の3次元測定
【対象】
⽣産設備
【導⼊前】
レーザートラッカー
【導⼊の決め⼿】
予算、多点同時で3次元の挙動を
計測できた
acepoint Inc. 18
導⼊効果①設備の3次元測定
導入コスト60%カット 計測⼈⼯
5
100 100
90 4 4 4 4 4
80 3 3
70
60 2 2 2 2
50
40 1
40
30 0 (時間)
20 導⼊1年⽬ 2年⽬ 3年⽬ 4年⽬
10 従来⼿法 本システム
0
従来システム モーションキャプチャー
acepoint Inc. 19