



パルス入力でブラシレスモータを制御
・ブラシレスモータのためパルスモータの脱調問題を解消
このカタログについて
| ドキュメント名 | ブラシレスモータ用位置制御ドライバ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 524.2Kb |
| 取り扱い企業 | ツカサ電工株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
MOTOR DRIVER
モータドライバ
■ TCP-S30 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 152
(PWM制御型DCモータドライバ)
■ TCP-S27A ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 154
(速度制御型ブラシレスモータドライバ)
■ TCP-P27A ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 162
(位置制御型ブラシレスモータドライバ)
■ 技術資料 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 170
Page2
位置制御型ブラシレスモータドライバ
TCP-P27A TCP-P27A-22A/22D/611B TCP-P27A-55NTCP-P27A-503A/503B TCP-P27A-609/619
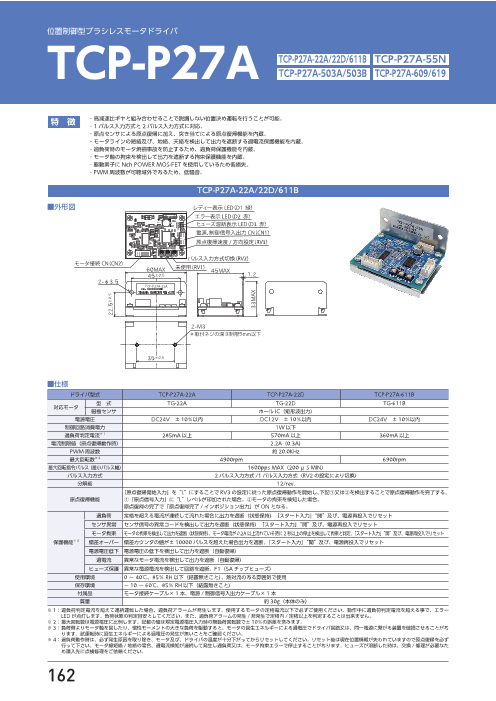
特 徴 ・ 高減速比ギヤと組み合わせることで脱調しない位置決め運転を行うことが可能。・1パルス入力方式と 2パルス入力方式に対応。
・原点センサによる原点復帰に加え、突き当てによる原点復帰機能を内蔵。
・モータラインの短絡及び、地絡、天絡を検出して出力を遮断する過電流保護機能を内蔵。
・過負荷時のモータ焼損事故を防止するため、過負荷保護機能を内蔵。
・モータ軸の拘束を検出して出力を遮断する拘束保護機能を内蔵。
・駆動素子にNch POWER MOS-FET を使用しているため低損失。
・PWM周波数が可聴域外であるため、低騒音。
TCP-P27A-22A/22D/611B
■外形図 レディー表示 LED(D1 緑)
エラー表示 LED(D2 赤)
ヒューズ溶断表示 LED(D3 赤)
電源、制御信号入出力 CN(CN1)
原点復帰速度 / 方向設定(RV3)
パルス入力方式切換(RV2)
モータ接続 CN(CN2)
60MAX 未使用(RV1) 45MAX
45±0.5 1.2
2-φ3.5
TCP-P27A-22A
2-M3
*取付ネジの深さ制限5mm以下
35±0.5
■仕様
ドライバ型式 TCP-P27A-22A TCP-P27A-22D TCP-P27A-611B
型 式 TG-22A TG-22D TG-611B
対応モータ
磁極センサ ホール IC(矩形波出力)
電源電圧 DC24V ± 10%以内 DC12V ± 10%以内 DC24V ± 10%以内
制御回路消費電力 1W以下
過負荷判定電流※1 285mA以上 570mA以上 360mA以上
電流制限値(原点復帰動作時) 2.2A(0.3A)
PWM周波数 約 20.0KHz
最大回転数※2 4900rpm 6900rpm
最大回転指令パルス(最小パルス幅) 1600pps MAX(200μ S MIN)
パルス入力方式 2パルス入力方式 /1パルス入力方式(RV2の設定により切換)
分解能 12/rev.
「原点復帰開始入力」を“L”にすることで RV3の設定に従った原点復帰動作を開始し、下記①又は②を検出することで原点復帰動作を完了する。
原点復帰機能 ①「原点信号入力」に“L”レベルが印加された場合。②モータの拘束を検知した場合。
原点復帰の完了で「原点復帰完了 /インポジション出力」がONとなる。
過負荷 定格を超える電流が連続して流れた場合に出力を遮断(状態保持) 「スタート入力」“開”及び、電源再投入でリセット
センサ異常 センサ信号の異常コードを検出して出力を遮断(状態保持) 「スタート入力」“開”及び、電源再投入でリセット
モータ拘束 モータの拘束を検出して出力を遮断(状態保持)。モータ電流が0.2A以上流れている時に2秒以上の停止を検出して拘束と判定。「スタート入力」“開”及び、電源再投入でリセット
保護機能※4 偏差オーバー 偏差カウンタの値が± 10000パルスを超えた場合出力を遮断。「スタート入力」“開”及び、電源再投入でリセット
電源電圧低下 電源電圧の低下を検出して出力を遮断(自動復帰)
過電流 異常なモータ電流を検出して出力を遮断(自動復帰)
ヒューズ保護 異常な電源電流を検出して回路を遮断。F1(5Aチップヒューズ)
使用環境 0 ~ 40℃、85% RH 以下(結露無きこと)、熱対流のある雰囲気で使用
保存環境 - 10 ~ 60℃、85% RH 以下(結露無きこと)
付属品 モータ接続ケーブル× 1本、電源 /制御信号入出力ケーブル× 1本
質量 約 30g(本体のみ)
※1: 過負荷判定電流を超えて連続運転した場合、過負荷アラームが発生します。使用するモータの定格電流以下で必ずご使用ください。動作中に過負荷判定電流を超える事で、エラー
LEDが点灯します。負荷状態の判定目安としてください。また、過負荷アラームの発生 /非発生で定格内 /定格以上を判定することは出来ません。
※ 2: 最大回転数は電源電圧に比例します。記載の値は規定電源電圧入力時の無負荷回転数で± 10%の誤差を含みます。
※ 3: 負荷側よりモータ軸を回したり、慣性モーメントの大きな負荷を駆動すると、モータの回生エネルギーによる過電圧でドライバ回路又は、同一電源に繋がる装置を破損させることがあ
ります。試運転時に回生エネルギーによる過電圧の発生が無いことをご確認ください。
※ 4: 過負荷動作時は、必ず発生原因を取り除き、モータ及び、ドライバの温度が十分下がってからリセットしてください。リセット後は現在位置情報が失われていますので原点復帰を必ず
行って下さい。モータ線短絡 /地絡の場合、過電流検知が連続して発生し過負荷又は、モータ拘束エラーで停止することがあります。ヒューズが溶断した時は、交換 /修理が必要なた
め購入先に点検修理をご依頼ください。
162
22.5±0.5
33MAX
Page3
■接続図
・原点復帰機能を使用する場合の接続例 ・原点復帰機能を使用しない場合の接続例
モータ接続ケーブル モータ接続ケーブル
CN2 +5V CN2 +5V
赤 8 赤 8
黒 6 黒 6
茶 12 茶 12
11 NC 11 NC
TGー22A、22D、611Bモータ 黄 10 TGー22A、22D、611Bモータ 黄 10 4 NC 4 NC
白 1 白 1
2 NC 2 NC
青 5 青 5
緑 7 緑 7
A 信号 橙 3 橙 3 9 NC 9 NC
(CCW/PULSE) A 信号
B信号 (CCW/PULSE)
(CW/DIR.) +5V B 信号原点復帰開始SW +5V (CW/DIR.)
CN1 2.2K CN1 2.2KスタートSW
茶 1 スタートSW 1
外部電源 茶 赤 2 赤 2
橙 3
4 外部電源 橙
3
黄 黄 4
原点復帰完了/インポジシ ョン信号 緑 5 緑 5
アラーム信号 青 6 紫 7 アラーム信号
青 6
紫 7
外部電源GND 灰 8 白 9 外部電源GND
灰 8
白 9
黒 10 黒 10
原点リミットSW 逆並列ダイオード
逆並列ダイオ ード
12V、24V入力
電源SW
12V、24V入力 0V入力
0V入力 電源SW 原点復帰スタート入力(3)、原点信号入力(7)を共に“L”とすれば
TCP-P27A-22A/22D/611B 電源投入で原点復帰をスキップし、レディー状態となります。
TCP-P27A-22A/22D/611B
※接続時の注意や原点復帰機能については、P.170 をご覧ください。
■入出力信号、各表示、設定の内容
名称、ピンNo. 線色 信号名称 内 容
1 茶 A信号入力 回転指令パルス(CCW、CW、PULSE)(CCW/PULSE) ↓立下りエッジでカウント "H”:開放
回転方向指令(DIR.) (又は 4.0V MIN)
2 赤 B信号入力(CW/DIR.) “H”:CW、“L”:CCW “L”:0 ~ 0.7V入力電流:3mA MAX
3 橙 原点復帰開始入力 “L”で原点復帰動作開始(パルス幅:100mS以上) 最大印加電圧:30V ドモ
4 黄 スタート入力 “H”:ブ レーキ停止、偏差クリア、カウント禁止、“L”:通常動作 ライータ
CN1 原点復帰完了 / 原点復帰時:原点復帰完了
オープンコレクタ出力 バ
(電源、制御信号入出力) 5 緑 インポジション出力 通常動作時: 偏差± 6 パルス以内で 回転指令が 5pps 以下の時
最大印加電圧:30V
上記条件で出力トランジスタがON 最大電流:20mA
ON時飽和電圧:
6 青 アラーム出力 過負荷、センサ異常、偏差オーバー を検出して出力トランジスタON 0.8V MAX
TCP-S30
正常時は出力トランジスタOFF フリーホイールダイオード内蔵
7 紫 原点信号入力 入力電圧:24V MAX(Vth:1.5V)、“L”:で原点検知 TCP-S27A
8 灰 GND 制御入力信号用グランド(CN1-10 と同電位) TCP-P27A
9 白 + 12V、+ 24V入力
電源入力
10 黒 0V入力(CN1-8 と同電位)
8 赤 + 5V 磁極センサ用 5V出力(他の用途への使用不可)
6 黒 GND 磁極センサ用GND
12 茶 A相
10 黄 センサ信号入力 B相
1 白 C相
CN2 5 青 A相コイル
(モータ信号入出力) 7 緑 モータ出力 B相コイル
3 橙 C相コイル
2
4
- NC 未使用
9
11
レディー表示 LED ・レディー状態(駆動可能状態) :点灯 ・原点復帰動作時(指令パルス禁止) :点滅
(D1:緑色) ・原点復帰待ち状態(指令パルス禁止) :間欠点灯 ・エラー発生時 :消灯
・正常動作時 :消灯 ・モータ拘束時 :1回点滅
状態表示 LED エラー表示 LED ・パワーオンリセット時 :点灯(0.5 秒) ・過負荷検出時 :2回点滅
(D2:赤色) ・過負過判定電流以上を検出 :点灯 ・偏差オーバー時 :3回点滅
・センサ異常時 :連続点灯 ・電源電圧低下 :D1/D2交互点灯
ヒューズ溶断 LED(D3:赤色)ヒューズ(F1)の溶断にて点灯
RV1 未使用
調整VR
(モータ回転数設定用) RV2 パルス入力方式切換(出荷時は 2パルス入力方式に設定)
RV3 原点復帰方向 /速度設定(出荷時は 0目盛りに設定)
163
Page4
TCP-P27A-55N
■外形図 レディー表示 LED(D1 緑)
エラー表示 LED(D2 赤)
ヒューズ溶断表示 LED(D3 赤)
電源、制御信号入出力CN(CN1)
原点復帰速度 / 方向設定(RV3)
モータ接続CN(CN2) パルス入力方式切換(RV2)
60MAX 未使用(RV1) 45MAX
45±0.5 1.2
2-φ3.5
TCP-P27A-55N
2-M3
*取付ネジの深さ制限5mm以下
35±0.5
■仕様
ドライバ型式 TCP-P27A-55N
型 式 TG-55L TG-55M TG-55N
対応モータ
磁極センサ ホール IC(矩形波出力)
電源電圧 DC24V ± 10%以内
制御回路消費電力 1W以下
過負荷判定電流※1 620mA以上
電流制限値(原点復帰動作時) 3.3A(0.6A)
PWM周波数 約 20.0KHz
最大回転数※2 3700rpm 6350rpm 8000rpm
最大回転指令パルス(最小パルス幅) 1600pps MAX(200μ S MIN)
パルス入力方式 2パルス入力方式 /1パルス入力方式(RV2の設定により切換)
分解能 12/rev.
「原点復帰開始入力」を“L”にすることで RV3の設定に従った原点復帰動作を開始し、下記①又は②を検出することで原点復帰動作を完了する。
原点復帰機能 ①「原点信号入力」に“L”レベルが印加された場合。②モータの拘束を検知した場合。
原点復帰の完了で「原点復帰完了 /インポジション出力」がONとなる。
過負荷 定格を超える電流が連続して流れた場合に出力を遮断(状態保持) 「スタート入力」“開”及び、電源再投入でリセット
センサ異常 センサ信号の異常コードを検出して出力を遮断(状態保持) 「スタート入力」“開”及び、電源再投入でリセット
モータの拘束を検出して出力を遮断(状態保持)
モータ拘束 モータ電流が 0.5A以上流れている時に 2秒以上の停止を検出して拘束と判定
保護機能※4 「スタート入力」“開”及び、電源再投入でリセット
偏差オーバー 偏差カウンタの値が± 10000パルスを超えた場合出力を遮断 「スタート入力」“開”及び、電源再投入でリセット
電源電圧低下 電源電圧の低下を検出して出力を遮断(自動復帰)
過電流 異常なモータ電流を検出して出力を遮断(自動復帰)
ヒューズ保護 異常な電源電流を検出して回路を遮断 F1(5Aチップヒューズ)
使用環境 0 ~ 40℃、85% RH 以下(結露無きこと)、熱対流のある雰囲気で使用
保存環境 - 10 ~ 60℃、85% RH 以下(結露無きこと)
付属品 モータ接続ケーブル× 1本、電源 /制御信号入出力ケーブル× 1本
質量 約 30g(本体のみ)
※1: 過負荷判定電流を超えて連続運転した場合、過負荷アラームが発生します。使用するモータの定格電流以下で必ずご使用ください。動作中に過負荷判定電流を超える事で、エラー
LEDが点灯します。負荷状態の判定目安としてください。また、過負荷アラームの発生 /非発生で定格内 /定格以上を判定することは出来ません。
※ 2: 最大回転数は電源電圧に比例します。記載の値は規定電源電圧入力時の無負荷回転数で± 10%の誤差を含みます。
※ 3: 負荷側よりモータ軸を回したり、慣性モーメントの大きな負荷を駆動すると、モータの回生エネルギーによる過電圧でドライバ回路又は、同一電源に繋がる装置を破損させることがあ
ります。試運転時に回生エネルギーによる過電圧の発生が無いことをご確認ください。
※ 4: 過負荷動作時は、必ず発生原因を取り除き、モータ及び、ドライバの温度が十分下がってからリセットしてください。リセット後は現在位置情報が失われていますので原点復帰を必ず
行って下さい。モータ線短絡 /地絡の場合、過電流検知が連続して発生し過負荷又は、モータ拘束エラーで停止することがあります。ヒューズが溶断した時は、交換 /修理が必要なた
め購入先に点検修理をご依頼ください。
164
22.5±0.5
33MAX
Page5
■接続図
・原点復帰機能を使用する場合の接続例 ・原点復帰機能を使用しない場合の接続例
/
※接続時の注意や原点復帰機能については、P.170 をご覧ください。
■入出力信号、各表示、設定の内容
名称、ピンNo. 線色 信号名称 内 容
1 茶 A信号入力 回転指令パルス(CCW、CW、PULSE)(CCW/PULSE) ↓立下りエッジでカウント “H”:開放
B信号入力 回転方向指令(DIR.) (又は 4.0V MIN) 2 赤 (CW/DIR.) “H”:CW、“L”:CCW “L”:0 ~ 0.7V入力電流:3mA MAX ド
3 橙 原点復帰開始入力 “L”で原点復帰動作開始(パルス幅:100mS以上) 最大印加電圧:30V ラモー
4 黄 スタート入力 “H”: ブレーキ停止、偏差クリア、 カウント禁止、“L”:通常動作 イ
バタ
オープンコレクタ出力
CN1 原点復帰完了 / 原点復帰時:原点復帰完了 最大印加電圧:30V
(電源、制御信号入出力) 5 緑 インポジション出力 通常動作時: 偏差± 6 パルス以内で回転指令が 5pps 以下の時 上記条件で出力トランジスタがON 最大電流:20mA
ON時飽和電圧: TCP-S30
6 青 アラーム出力 過負荷、センサ異常、偏差オーバー、モータ拘束を検出して出力トランジスタON 0.8V MAX正常時は出力トランジスタOFF フリーホイールダイオード内蔵 TCP-S27A
7 紫 原点信号入力 入力電圧:24V MAX(Vth:1.5V)、“L”:で原点検知
8 灰 GND 制御入力信号用グランド(CN1-10 と同電位) TCP-P27A
9 白 + 12V、+ 24V入力
電源入力
10 黒 0V入力(CN1-8 と同電位)
8 赤 + 5V 磁極センサ用 5V出力(他の用途への使用不可)
6 黒 GND 磁極センサ用GND
12 茶 A相
10 黄 センサ信号入力 B相
1 白 C相
CN2 5 青 A相コイル
(モータ信号入出力) 7 緑 モータ出力 B相コイル
3 橙 C相コイル
2
4
- NC 未使用
9
11
レディー表示 LED ・レディー状態(駆動可能状態) :点灯 ・原点復帰動作時(指令パルス禁止) :点滅
(D1:緑色) ・原点復帰待ち状態(指令パルス禁止) :間欠点灯 ・エラー発生時 :消灯
・正常動作時 :消灯 ・モータ拘束時 :1回点滅
状態表示 LED エラー表示 LED ・パワーオンリセット時 :点灯(電源投入後 0.5 秒) ・過負荷検出時 :2回点滅
(D2:赤色) ・過負過判定電流以上を検出 :点灯 ・偏差オーバー時 :3回点滅
・センサ異常時 :連続点灯 ・電源電圧低下 :D1/D2交互点灯
ヒューズ溶断 LED(D3:赤色)ヒューズ(F1)の溶断にて点灯
RV1 未使用
調整VR
(モータ回転数設定用) RV2 パルス入力方式切換(出荷時は 2パルス入力方式に設定)
RV3 原点復帰方向 /速度設定(出荷時は 0目盛りに設定)
165
Page6
TCP-P27A-503A/503B
■外形図 レディー表示 LED(D1 緑)
エラー表示 LED(D2 赤)
ヒューズ溶断表示LED(D3 赤)
電源、制御信号入出力CN(CN1)
原点復帰速度 /方向設定(RV3)
モータ接続CN(CN2) パルス入力方式切換(RV2)
60MAX 未使用(RV1) 45MAX
45±0.5 1.2
2-φ3.5
TCP-P27A-503A
2-M3
*取付ネジの深さ制限5mm以下
35±0.5
■仕様
ドライバ型式 TCP-P27A-503A TCP-P27A-503B
型 式 TG-503A TG-503B
対応モータ
磁極センサ ホール IC(矩形波出力)
電源電圧 DC24V ± 10%以内
制御回路消費電力 1W以下
過負荷判定電流※1 1150mA以上 1790mA以上
電流制限値(原点復帰動作時) 6.6A(1.0A)
PWM周波数 約 20.0KHz
最大回転数※2 4900rpm 7220rpm
最大回転指令パルス(最小パルス幅) 1600pps MAX(200μ S MIN)
パルス入力方式 2パルス入力方式 /1パルス入力方式(RV2の設定により切換)
分解能 18/rev.
「原点復帰開始入力」を“L”にすることで RV3の設定に従った原点復帰動作を開始し、下記①又は②を検出することで原点復帰動作を完了する。
原点復帰機能 ①「原点信号入力」に“L”レベルが印加された場合。②モータの拘束を検知した場合。
原点復帰の完了で「原点復帰完了 /インポジション出力」がONとなる。
過負荷 定格を超える電流が連続して流れた場合に出力を遮断(状態保持) 「スタート入力」“開”及び、電源再投入でリセット
センサ異常 センサ信号の異常コードを検出して出力を遮断(状態保持) 「スタート入力」“開”及び、電源再投入でリセット
モータの拘束を検出して出力を遮断(状態保持)
モータ拘束 モータ電流が 1.0A以上流れている時に 2秒以上の停止を検出して拘束と判定
保護機能※4 「スタート入力」“開”及び、電源再投入でリセット
偏差オーバー 偏差カウンタの値が± 10000パルスを超えた場合出力を遮断 「スタート入力」“開”及び、電源再投入でリセット
電源電圧低下 電源電圧の低下を検出して出力を遮断(自動復帰)
過電流 異常なモータ電流を検出して出力を遮断(自動復帰)
ヒューズ保護 異常な電源電流を検出して回路を遮断 F1(5Aチップヒューズ)
使用環境 0 ~ 40℃、85% RH 以下(結露無きこと)、熱対流のある雰囲気で使用
保存環境 - 10 ~ 60℃、85% RH 以下(結露無きこと)
付属品 モータ接続ケーブル× 1本、電源 /制御信号入出力ケーブル× 1本
質量 約 30g(本体のみ)
※1: 過負荷判定電流を超えて連続運転した場合、過負荷アラームが発生します。使用するモータの定格電流以下で必ずご使用ください。動作中に過負荷判定電流を超える事で、エラー LED
が点灯します。負荷状態の判定目安としてください。また、過負荷アラームの発生 /非発生で定格内 /定格以上を判定することは出来ません。
※ 2: 最大回転数は電源電圧に比例します。記載の値は規定電源電圧入力時の無負荷回転数で± 10%の誤差を含みます。
※ 3:負 荷側よりモータ軸を回したり、慣性モーメントの大きな負荷を駆動すると、モータの回生エネルギーによる過電圧でドライバ回路又は、同一電源に繋がる装置を破損させることがあ
ります。試運転時に回生エネルギーによる過電圧の発生が無いことをご確認ください。
※ 4: 過負荷動作時は、必ず発生原因を取り除き、モータ及び、ドライバの温度が十分下がってからリセットしてください。リセット後は現在位置情報が失われていますので原点復帰を必ず
行って下さい。モータ線短絡 /地絡の場合、過電流検知が連続して発生し過負荷又は、モータ拘束エラーで停止することがあります。ヒューズが溶断した時は、交換 /修理が必要なた
め購入先に点検修理をご依頼ください。
166
22.5±0.5
33MAX
Page7
■接続図
・原点復帰機能を使用する場合の接続例 ・原点復帰機能を使用しない場合の接続例
モータ接続ケーブル モータ接続ケーブル
CN2 +5V CN2 +5V
赤 8 赤 8
黒 6 黒 6
茶 12 茶 12
11 NC 11 NC
黄 10 黄 10
4 NC 4 NC
白 1 白 1
2 NC 2 NC
TGー503□モータ 青 5 TGー503□モータ 青 5
緑 7 緑 7
橙 3 橙 3
A 信号 9 NC 9 NC
(CCW/PULSE)
B信号
(CW/DIR.)
原点復帰開始SW +5V
2.2K
スタートSW CN1
1
外部電源 茶 赤 2
橙 3
黄 4
原点復帰完了/インポジシ ョン信号 緑 5
アラーム信号 青 6
紫 7
外部電源GND 灰 8
白 9
黒 10
原点リミットSW
逆並列ダイオー ド
24V入力
電源SW
0V入力
TCP-P27A-503A/B
※接続時の注意や原点復帰機能については、P.170 をご覧ください。
■入出力信号、各表示、設定の内容
名称、ピンNo. 線色 信号名称 内 容
1 茶 A信号入力 回転指令パルス(CCW、CW、PULSE)(CCW/PULSE) ↓立下りエッジでカウント “H”:開放
B信号入力 回転方向指令(DIR.) (又は 4.0V MIN) 2 赤 (CW/DIR.) “H”:CW、“L”:CCW “L”:0 ~ 0.7V入力電流:3mA MAX ド
3 橙 原点復帰開始入力 “L”で原点復帰動作開始(パルス幅:100mS以上) 最大印加電圧:30V ラモー
4 黄 スタート入力 “H”: ブレーキ停止、偏差クリア、カウント禁止、“L”:通常動作 イ
バタ
原点復帰時:原点復帰完了 オープンコレクタ出力 CN1 5 緑 原点復帰完了 / 通常動作時:偏差± 6パルス以内で 最大印加電圧:30V (電源、制御信号入出力) インポジション出力 回転指令が 5pps 以下の時上記条件で出力トランジスタがON 最大電流:20mA
ON時飽和電圧: TCP-S30
6 青 アラーム 過負荷、センサ異常、偏差オーバー を検出して出力トランジスタ 0.8V MAX出力 ON 正常時は出力トランジスタOFF フリーホイールダイオード内蔵 TCP-S27A
7 紫 原点信号入力 入力電圧:24V MAX(Vth:1.5V)、“L”:で原点検知
8 灰 GND 制御入力信号用グランド(CN1-10 と同電位) TCP-P27A
9 白 + 24V入力
電源入力
10 黒 0V入力(CN1-8 と同電位)
8 赤 + 5V 磁極センサ用 5V出力(他の用途への使用不可)
6 黒 GND 磁極センサ用GND
12 茶 A相
10 黄 センサ信号入力 B相
1 白 C相
CN2 5 青 A相コイル
(モータ信号入出力) 7 緑 モータ出力 B相コイル
3 橙 C相コイル
2
4
- NC 未使用
9
11
レディー表示 LED ・レディー状態(駆動可能状態) :点灯 ・原点復帰動作時(指令パルス禁止) :点滅
(D1:緑色) ・原点復帰待ち状態(指令パルス禁止) :間欠点灯 ・エラー発生時 :消灯
・正常動作時 :消灯 ・モータ拘束時 :1回点滅
状態表示 LED エラー表示 LED ・パワーオンリセット時 :点灯(0.5 秒) ・過負荷検出時 :2回点滅
(D2:赤色) ・過負過判定電流以上を検出: 点灯 ・偏差オーバー時 :3回点滅
・センサ異常時 :連続点灯 ・電源電圧低下 :D1/D2交互点灯
ヒューズ溶断 LED(D3:赤色)ヒューズ(F1)の溶断にて点灯
RV1 未使用
調整VR
(モータ回転数設定用) RV2 パルス入力方式切換(出荷時は 2パルス入力方式に設定)
RV3 原点復帰方向 /速度設定(出荷時は 0目盛りに設定)
167
Page8
TCP-P27A-609/619
■外形図 レディー表示 LED(D1 緑)
エラー表示 LED(D2 赤)
ヒューズ溶断表示 LED(D3 赤)
電源、制御信号入出力 CN(CN1)
原点復帰速度 / 方向設定(RV3)
モータ接続 CN(CN2) パルス入力方式切換(RV2)
60MAX 未使用(RV1) 45MAX
45±0.5 1.2
2-φ3.5
TCP-P27A-609
2-M3
*取付ネジの深さ制限5mm以下
35±0.5
■仕様
ドライバ型式 TCP-P27A-609 TCP-P27A-619
型 式 TG-609A TG-609B、TG-609C TG-619B
対応モータ
磁極センサ ホール素子(アナログ電圧出力)
電源電圧 DC24V ± 10%以内
制御回路消費電力 1W以下
過負荷判定電流※1 1570mA以上
電流制限値(原点復帰動作時) 6.6A(0.88A)
PWM周波数 約 20.0KHz
最大回転数※2 3700rpm 3800rpm
最大回転指令パルス(最小パルス幅) 1600pps MAX(200μ S MIN)
パルス入力方式 2パルス入力方式 /1パルス入力方式(RV2の設定により切換)
分解能 24/rev.
「原点復帰開始入力」を“L”にすることで RV3の設定に従った原点復帰動作を開始し、下記①又は②を検出することで原点復帰動作を完了する。
原点復帰機能 ①「原点信号入力」に“L”レベルが印加された場合。②モータの拘束を検知した場合。
原点復帰の完了で「原点復帰完了 /インポジション出力」がONとなる。
過負荷 定格を超える電流が連続して流れた場合に出力を遮断(状態保持) 「スタート入力」“開”及び、電源再投入でリセット
センサ異常 センサ信号の異常コードを検出して出力を遮断(状態保持) 「スタート入力」“開”及び、電源再投入でリセット
モータの拘束を検出して出力を遮断(状態保持)
モータ拘束 モータ電流が 1.0A以上流れている時に 2秒以上の停止を検出して拘束と判定
保護機能※4 「スタート入力」“開”及び、電源再投入でリセット
偏差オーバー 偏差カウンタの値が± 10000パルスを超えた場合出力を遮断 「スタート入力」“開”及び、電源再投入でリセット
電源電圧低下 電源電圧の低下を検出して出力を遮断(自動復帰)
過電流 異常なモータ電流を検出して出力を遮断(自動復帰)
ヒューズ保護 異 常な電源電流を検出して回路を遮断 F1(5Aチップヒューズ)
使用環境 0 ~ 40℃、85% RH 以下(結露無きこと)、熱対流のある雰囲気で使用
保存環境 - 10 ~ 60℃、85% RH 以下(結露無きこと)
付属品 モータ接続ケーブル× 1本、電源 /制御信号入出力ケーブル× 1本
質量 約 30g(本体のみ)
※1: 過負荷判定電流を超えて連続運転した場合、過負荷アラームが発生します。使用するモータの定格電流以下で必ずご使用ください。動作中に過負荷判定電流を超える事で、エラー LED
が点灯します。負荷状態の判定目安としてください。また、過負荷アラームの発生 /非発生で定格内 /定格以上を判定することは出来ません。
※ 2: 最大回転数は電源電圧に比例します。記載の値は規定電源電圧入力時の無負荷回転数で± 10% の誤差を含みます。
※ 3: 負荷側よりモータ軸を回したり、慣性モーメントの大きな負荷を駆動すると、モータの回生エネルギーによる過電圧でドライバ回路又は、同一電源に繋がる装置を破損させることがあ
ります。試運転時に回生エネルギーによる過電圧の発生が無いことをご確認ください。
※ 4: 過負荷動作時は、必ず発生原因を取り除き、モータ及び、ドライバの温度が十分下がってからリセットしてください。リセット後は現在位置情報が失われていますので原点復帰を必ず
行って下さい。モータ線短絡 /地絡の場合、過電流検知が連続して発生し過負荷又は、モータ拘束エラーで停止することがあります。ヒューズが溶断した時は、交換 /修理が必要なた
め購入先に点検修理をご依頼ください。
168
22.5±0.5
33MAX
Page9
■接続図
・原点復帰機能を使用する場合の接続例 ・原点復帰機能を使用しない場合の接続例
/
※接続時の注意や原点復帰機能については、P.170 をご覧ください。
■入出力信号、各表示、設定の内容
名称、ピンNo. 線色 信号名称 内 容
1 茶 A信号入力 回転指令パルス(CCW、CW、PULSE)(CCW/PULSE) ↓立下りエッジでカウント “H”:開放
B信号入力 回転方向指令(DIR.) (又は 4.0V MIN) 2 赤 (CW/DIR.) “H”:CW、“L”:CCW “L”:0 ~ 0.7V入力電流:3mA MAX
3 橙 原点復帰開始入力 “L”で原点復帰動作開始(パルス幅:100mS以上) 最大印加電圧:30V ドモ
4 黄 スタート入力 “H”:ブ レーキ停止、偏差クリア、カウント禁止、“L”:通常動作 ライー
バタ
CN1 5 緑 原点復帰完了 /
原点復帰時:原点復帰完了 オープンコレクタ出力 最大印加電
(電源、制御信号入出力) インポジション出力 通常動作時: 偏差± 6 パルス以内で回転指令が 5pps 以下の時 圧:30V 最大電流:20mA 上記条件で出力トランジスタがON ON時飽和電圧:
6 青 アラーム 過負荷、センサ異常、偏差オーバーを検出して出力トランジスタON
0.8V MAX TCP-S30
出力 正常時は出力トランジスタOFF フリーホイールダイオード内蔵
7 紫 原点信号入力 入力電圧:24V MAX(Vth:1.5V)、“L”:で原点検知 TCP-S27A
8 灰 GND 制御入力信号用グランド(CN1-10 と同電位) TCP-P27A
9 白 + 24V入力
電源入力
10 黒 0V入力(CN1-8 と同電位)
8 赤 + 5V 磁極センサ用 5V出力(他の用途への使用不可)
6 黒 GND 磁極センサ用GND
12 茶 +A相
11 灰 -A相
10 黄 + B相
センサ信号入力
CN2 4 灰 - B相
(モータ信号入出力) 1 白 +C相
2 灰 -C相
5 青 A相コイル
7 緑 モータ出力 B相コイル
3 橙 C相コイル
9 - NC 未使用
レディー表示 LED ・レディー状態(駆動可能状態) :点灯 ・原点復帰動作時(指令パルス禁止): 点滅
(D1:緑色) ・原点復帰待ち状態(指令パルス禁止): 間欠点灯 ・エラー発生時 :消灯
・正常動作時 :消灯 ・モータ拘束時 :1回点滅
状態表示 LED エラー表示 LED ・パワーオンリセット時 :点灯(0.5 秒) ・過負荷検出時 :2回点滅
(D2:赤色) ・過負過判定電流以上を検出: 点灯 ・偏差オーバー時: 3 回点滅
・センサ異常時 :連続点灯 ・電源電圧低下 :D1/D2交互点灯
ヒューズ溶断 LED(D3:赤色)ヒューズ(F1)の溶断にて点灯
RV1 未使用
調整VR
(モータ回転数設定用) RV2 パルス入力方式切換(出荷時は 2パルス入力方式に設定)
RV3 原点復帰方向 /速度設定(出荷時は 0目盛りに設定)
169
Page10
技術資料
TCP-S27Aシリーズ
■接続時の注意
※ 電源遮断時のサージ電圧対策、回生電力による過電圧破損防止のため、電源SWには逆並列ダイオードを挿入することをお勧めします。
※必 要に応じて電源ラインにノイズフィルタ及び、回生電圧の吸収を目的として電解コンデンサを入れてください。
※ 外部速度指令で動作させる時、外部電源(+5V)が用意出来ない場合は、図に示す様に電源ラインから抵抗分圧で速度指令電圧を発生させてください。
10K Ω B の VR を使用する場合、22KΩ程度の抵抗を電源間に直列接続します(電源電圧 12V の時は 10KΩ程度の抵抗を接続)。
※ 電源 /制御信号入出力ケーブルは 50cm 以内でご使用ください。モータ接続ケーブルは 3mまで延長することが出来ます。
■タイムチャート
TCP-P27Aシリーズ
■接続時の注意
※原 点復帰が完了するまで「A 信号入力」、「B 信号入力」の信号は無視されます。
※ 原点復帰の位置決めを突き当てで行う場合は原点信号入力を電源にプルアップ又は、電源に接続してください。
※「 スタート入力」を開放した場合、再度原点復帰が必要になります。原点復帰の必要が無い場合は「原点復帰開始入力」と「原点信号入力」を共に“L”とし
てください。
※ 電源遮断時のサージ電圧対策、回生電力による過電圧破損防止のため、電源SWには逆並列ダイオードを挿入することをお勧めします。
※必 要に応じて電源ラインにノイズフィルタ及び、回生電圧の吸収を目的として電解コンデンサを入れてください。
※ 電源 /制御信号入出力ケーブルは 50cm 以内でご使用ください。
※ モータ接続ケーブルは 3mまで延長することが出来ます。
■原点復帰について
電源投入直後、又は「スタート入力」を“H”⇒“L”に切換直後、原点復帰動作待ちの状態となります(D1間欠点灯)。この状態で「原点復帰開始入力」を“L”
にすることで RV3 で設定された回転数、回転方向で原点復帰動作を開始します(D1点滅)。この時、「A 信号入力」、「B 信号入力」はインヒビット状態となり、
入力は無視されます。また、原点復帰中は電流制限値が下がり、突き当て原点検出時(拘束時)のメカ破損を防止します。原点復帰中は「原点復帰完了 /インポ
ジション出力」がOFF(“H”レベル)となり、原点復帰完了でONとなります(原点復帰中はインポジション状態であっても出力はOFFとなります)。
①原点リミットスイッチで原点を決める場合
原 点復帰を開始後、「原点信号入力」のレベルが“L”に切り換わった箇所を原点と認識し
ます。「原点信号入力」はプルアップされていないため、必ずプルアップ抵抗を付加くだ 【RV3の設定】原点復帰方向 /速度を連続的に可変させることが出来ます。
さい。(1KΩ~ 10KΩの抵抗を+ 5V~+ 24Vラインに接続します)
②突き当てで原点を決める場合
原 点復帰を開始後、モータ軸が約 0.2 秒間拘束されることで拘束された位置から 1回転
戻り、その箇所を原点と認識します。
原点復帰は電源投入後 1回のみ行えます。再度原点復帰を行う必要がある場合は、リセット
することで再度原点復帰が可能となります。
原点復帰を行わない場合は「原点復帰開始入力」「原点信号入力」を共に“L”としてください。
電源投入で原点復帰をスキップしレディー状態(回転指令パルス入力待ち)となります。
■パルス入力方式の切換え
170