



3次元測域センサ(3D LiDAR)距離35m(最大)、水平210°、垂直40°の範囲を3次元計測するレーザスキャナ。
●測距原理にはパルス光によるTOF方式を採用しています。
●3次元の広範囲にレーザ光を照射し、2次元では計測が難しかった幅、奥行き、高さを測距します。
●水平210°垂直40°の広範囲計測により、幅・奥行き・高さを計測。物体を立体的に検出することが可能です。
●1周期2,590点の豊富なデータを出力し、インタレース機能により点群数を増やして解像度を上げることが可能です。
関連メディア
このカタログについて
| ドキュメント名 | 3次元測域センサ【データ出力タイプ】YVT-35LX-F0/FK |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 740.3Kb |
| 取り扱い企業 | 北陽電機株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
測 3次元測域センサ
域 YVT-35LX-F0/FK
セ
ン
サ
3 次元でワイドな計測
YVT-35LX-F0
YVT-35LX-FK
型式/品コード
種類 インタフェース 型式 品コード
データ出力タイプ Ethernet(TCP/IP)100BASE-TX YVT-35LX-F0 UYVT002
YVT-35LX-FK UYVT003
オプション・アクセサリ
電源ケーブル
仕様 型式 品コード 備考 外形
ケーブル長 3m YVT-C003 UZ00092 YVT1台に
ケーブル長 5m YVT-C005 UZ00093 1 本必要となります。
Ethernet ケーブル
仕様 型式 品コード 備考 外形
ケーブル長 3m YVT-ENET003 UZ00095 YVT1台に
ケーブル長 5m YVT-ENET005 UZ00096 1 本必要となります。
特徴
●水平210° 垂直 40° の広範囲計測により、幅・奥行き・高さを計測。物体を立体的に検出すること
が可能です。
●1周期 2,590点の豊富なデータを出力し、インタレース機能により点群数を増やして解像度を上げ
ることが可能です。
IMU(ジャイロ)センサ搭載 マルチエコー対応
角速度、加速度を検出します。内蔵 IMUなので 屋外使用での雪、雨、塵などの浮遊物や全面
時間補正が必要ありません。 カバーの分別に有効です。
PPS(Pulse Per Second)入力 耐環境性
GPSと併用する場合、PPS 信号によりセンサの 保護構造 IP67、耐周囲照度100,000lx、耐衝撃
タイムスタンプをリセットし、累積誤差を無く 10Gと様々な環境下での使用用途に適してい
します。 ます。
RS010
Page2
YVT-35LX-F0/FK 測
域
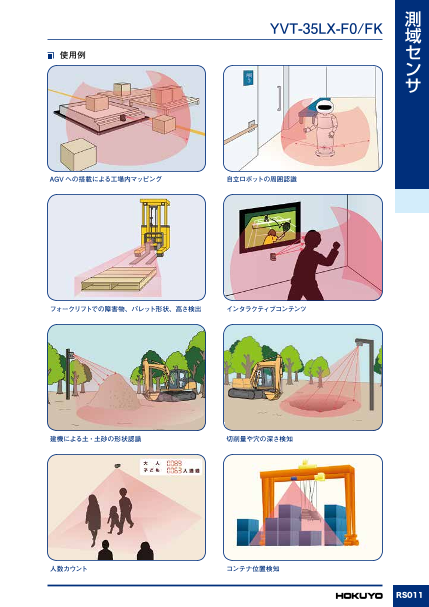
使用例 セ
ン
サ
AGV への搭載による工場内マッピング 自立ロボットの周囲認識
フォークリフトでの障害物、パレット形状、高さ検出 インタラクティブコンテンツ
建機による土・土砂の形状認識 切削量や穴の深さ検知
人数カウント コンテナ位置検知
RS011
Page3
測
域 YVT-35LX-F0/FK
セ 仕様
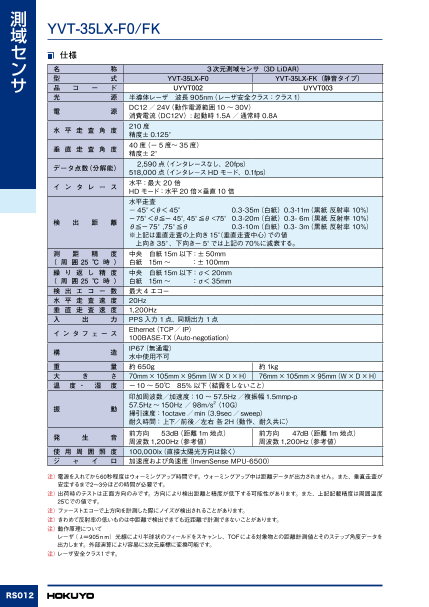
ン 名 称 3次元測域センサ(3D LiDAR)
型 式 YVT-35LX-F0 YVT-35LX-FK(静音タイプ)
サ 品 コ ー ド UYVT002 UYVT003
光 源 半導体レーザ 波長 905nm(レーザ安全クラス:クラス1)
電 源 DC12 / 24V(動作電源範囲 10 ~ 30V)
消費電流(DC12V): 起動時 1.5A / 通常時 0.8A
水 平 走 査 角 度 210 度
精度± 0.125°
垂 直 走 査 角 度 40 度(- 5 度~ 35 度)
精度± 2°
データ点数(分解能) 2,590 点(インタレースなし、20fps)
518,000 点(インタレース HD モード、0.1fps)
イ ン タ レ ー ス 水平:最大 20 倍
HD モード:水平 20 倍×垂直 10 倍
水平走査
- 45°<θ< 45° 0.3-35m(白紙)0.3-11m(黒紙 反射率 10%)
検 出 距 離 -75°<θ≦- 45°, 45°≦θ <75° 0.3-20m(白紙)0.3- 6m(黒紙 反射率 10%)
θ≦-75°,75°≦θ 0.3-10m(白紙)0.3- 3m(黒紙 反射率 10%)
※上記は垂直走査の上向き 15(°垂直走査中心)での値
上向き 35°、下向き- 5°では上記の 70%に減衰する。
測 距 精 度 中央 白紙 15m 以下:± 50mm
( 周 囲 25 ℃ 時 ) 白紙 15m ~ :± 100mm
繰 り 返 し 精 度 中央 白紙 15m 以下:σ< 20mm
( 周 囲 25 ℃ 時 ) 白紙 15m ~ :σ< 35mm
検 出 エ コ ー 数 最大 4 エコー
水 平 走 査 速 度 20Hz
垂 直 走 査 速 度 1,200Hz
入 出 力 PPS 入力 1 点、 同期出力 1 点
イ ン タ フ ェ ー ス Ethernet(TCP/ IP)
100BASE-TX(Auto-negotiation)
構 造 IP67(無通電)
水中使用不可
重 量 約 650g 約 1kg
大 き さ 70mm × 105mm × 95mm(W × D × H) 76mm × 105mm × 95mm(W × D × H)
温 度 ・ 湿 度 -10 ~ 50℃ 85% 以下(結露をしないこと)
印加周波数/加速度:10 ~ 57.5Hz /複振幅 1.5mmp-p
振 動 57.5Hz ~ 150Hz / 98m/s2( 10G)
掃引速度:1octave /min(3.9sec /sweep)
耐久時間: 上下/前後/左右 各 2H(動作、耐久共に)
発 生 音 前方向 53dB(距離 1m 地点) 前方向 47dB(距離 1m 地点)
周波数 1,200Hz(参考値) 周波数 1,200Hz(参考値)
使 用 周 囲 照 度 100,000lx(直接太陽光方向は除く)
ジ ャ イ ロ 加速度および角速度(InvenSense MPU-6500)
注) 電源を入れてから60秒程度はウォーミングアップ時間です。ウォーミングアップ中は距離データが出力されません。また、垂直走査が
安定するまで2〜3分ほどの時間が必要です。
注) 出荷時のテストは正面方向のみです。方向により検出距離と精度が低下する可能性があります。また、上記記載精度は周囲温度
25℃での値です。
注) ファーストエコーで上方向を計測した際にノイズが検出されることがあります。
注) きわめて反射率の低いものは中距離で検出できても近距離で計測できないことがあります。
注) 動作原理について
レーザ(λ=905nm)光線により半球状のフィールドをスキャンし、TOFによる対象物との距離計測値とそのステップ角度データを
出力します。外部演算により容易に3次元座標に変換可能です。
注) レーザ安全クラス1です。
RS012
Page4
YVT-35LX-F0/FK 測
域
接続 セ
〔出力回路〕 オープンコレクタ出力
SYNC OUT
DC30V 50mA MAX
主回路 ン
サ
- COM
PPS IN
1kΩ PPS 信号
外部抵抗例 (5mA供給 )
0Ω PPS COM
Active H 抵抗値 抵抗値
ON電流 2mA以上、OFF 電流 1mA以下
3.3V 660Ω 必要に応じて外部抵抗を挿入してください。
5V 1KΩ + V I N +
電源回路 - V I N - センサ
12V 2.4KΩ 電源
ケースFG
〔外部接続表〕
型番:YVT-C003(3m) 型番:YVT-ENET003(3m)
● 電源ケーブル YVT-C005(5m) ● Ethernet ケーブル YVT-ENET005(5m)
ピンNo. 機能 配線色 M8 防水コネクタ
1 + VIN(DC12/24V) 茶 ピンNo. 機能 配線色
2 PPS COM 白 1 TX+ 黄
3 - VIN(0V) 青 2 RD + 白
4 - COM 黒 3 RD - 青
5 SYNC OUT 灰 4 TX- 橙
6 PPS IN 桃
RJ45
ピンNo. 機能 配線色
1 TX+ 黄
2 TX- 橙
3 RD + 白
4 NC ー
5 NC ー
6 RD - 青
7 NC ー
8 NC ー
● コネクタピンアサイン
Ethernet コネクタ(4pin)
電源・入出力信号コネクタ(6pin)
● 電源・入出力コネクタ仕様 ● Ethernet コネクタ仕様
ピンNo. 機能 配線色 ピンNo. 機能
1 + VIN(DC12/24V) 茶 1 TX+
2 PPS COM 白 2 RD +
3 - VIN(0V) 青 3 RD -
4 - COM 黒 4 TX-
5 SYNC OUT 灰
6 PPS IN 桃
RS013
Page5
測
域 YVT-35LX-F0/FK
セ 外形図
ン [ YVT-35LX-F0 ]
105 (45)
サ 70
Ethernet
電源/IO
4 -M5 深さ8
70 56 +0.03
52±0.05 2-Φ30 深さ6
90
° )
表示窓 動
(ケー
ブル
可
10.5
17.5
[ YVT-35LX-FK ]
105 (45)
70
Ethernet
電源/I0
4-M5 深さ8
76 56 +0.03
52 ±0.05 2-Φ3 0 深さ6
)
90
゚
表示窓 ル可
動
ーブ
10.5 (ケ
17.5
RS014
95
95
垂
垂直検 5゚ 3
直
5
5゚ 出 °
検出角 水平検出角度
3 角5 平 出角度゚ 度
水 検 度 210゚
210゚
5 5
10.5 10.5
17.5
Φ5.2 Φ4.5 17.5 Φ5.2 Φ4.5
Φ10 Φ10
15 Φ10 Φ10
30 15
30
58 23
56 58 23
56