



要求の厳しい産業用アプリケーション向けリニアステージ
幅:114mm、トラベルレンジ:最大610mm
精密ボールネジ、最大荷重 50kg
ステッピングモータまたはサーボモータ駆動
ドライブトレインを折り畳んだコンパクトモデル
縦置き用に保持ブレーキ付きモデル
このカタログについて
| ドキュメント名 | L-812 高負荷対応リニアステージ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 4Mb |
| 取り扱い企業 | ピーアイ・ジャパン株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
高負荷対応リニアステージ
Stepper or Servo Motor • Spindle Drive • Cost Effective
L-812
n 幅:114mm、トラベルレンジ:最大610mm
n 精密ボールネジ、最大荷重 50kg
n ステッピングモータまたはサーボモータ駆動
n ドライブトレインを折り畳んだコンパクトモデル
n 縦置き用に保持ブレーキ付きモデル
要求の厳しい産業用アプリケーション向けリニアステージ
精密ボールネジ、高性能ステッピングモータまたはシンクロナスサーボモータ、ヘビーデューティー再循環ボールベ
アリング、高精度ロータリーエンコーダにより、高負荷での連続動作と信頼性を実現します。オプションの保持ブ
レーキにより、Z軸として使用することができます。また、ボールネジは分解せずに外部から再給油が可能なため、
高い信頼性と長寿命を実現します。
先駆的な設計
L-812シリーズの再循環ボールベアリングガイドは、高負荷容量とダイナミクスのために設計されています。モータ
の高分解能化により、トラッキング性能の向上、トラッキングエラーの低減、セトリングタイムの改善を実現
シンクロナスサーボモーター
高い位置決め精度と広い回転速度範囲での高い過負荷耐性を持つモータです。高トルク、低イナーシャのため、高ダ
イナミクスを実現します。長寿命、高性能、堅牢であるため、産業用オートメーション用途に優れた効果を発揮しま
す。
ステッピングモーター
強力で低振動の2相ステッピングモーターにより、位置コントロールなしでも正確な位置決めが可能です。
オプション
n ステッピングモータまたはシンクロナスサーボモータ
n 保持ブレーキ
n ロータリーエンコーダ、インクリメンタルまたはアブソリュート計測
n 全長を短くする折りたたみ式ドライブトレイン
n オプションのアクセサリ:L-812.TT1 モーションプラットフォーム
アプリケーション分野
n エレクトロニクス製造。マイクロアセンブリ。センサー/カメラ配置
n レーザー材料加工。レーザーマイクロマシニング
n 産業用インクジェット印刷。マトリックスプレートおよびプリント回路基板の製造。
n テストおよび検査。
n 医療機器の製造。密閉溶接 遺伝子研究所のロボットシステム
Page 1
19.10.2022
WWW.PI.WS
Page2
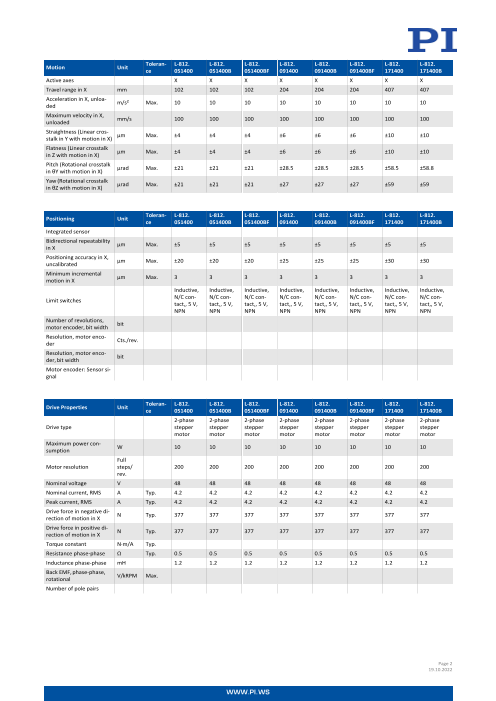
Motion Unit Toleran- L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
ce 051400 051400B 051400BF 091400 091400B 091400BF 171400 171400B
Active axes X X X X X X X X
Travel range in X mm 102 102 102 204 204 204 407 407
Acceleration in X, unloa-
ded m/s² Max. 10 10 10 10 10 10 10 10
Maximum velocity in X,
unloaded mm/s 100 100 100 100 100 100 100 100
Straightness (Linear cros-
stalk in Y with motion in X) µm Max. ±4 ±4 ±4 ±6 ±6 ±6 ±10 ±10
Flatness (Linear crosstalk
in Z with motion in X) µm Max. ±4 ±4 ±4 ±6 ±6 ±6 ±10 ±10
Pitch (Rotational crosstalk
in θY with motion in X) µrad Max. ±21 ±21 ±21 ±28.5 ±28.5 ±28.5 ±58.5 ±58.8
Yaw (Rotational crosstalk
in θZ with motion in X) µrad Max. ±21 ±21 ±21 ±27 ±27 ±27 ±59 ±59
___
Positioning Unit Toleran- L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
ce 051400 051400B 051400BF 091400 091400B 091400BF 171400 171400B
Integrated sensor
Bidirectional repeatability
in X µm Max. ±5 ±5 ±5 ±5 ±5 ±5 ±5 ±5
Positioning accuracy in X,
uncalibrated µm Max. ±20 ±20 ±20 ±25 ±25 ±25 ±30 ±30
Minimum incremental
motion in X µm Max. 3 3 3 3 3 3 3 3
Inductive, Inductive, Inductive, Inductive, Inductive, Inductive, Inductive, Inductive,
Limit switches N/C con- N/C con- N/C con- N/C con- N/C con- N/C con- N/C con- N/C con-
tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V,
NPN NPN NPN NPN NPN NPN NPN NPN
Number of revolutions,
motor encoder, bit width bit
Resolution, motor enco-
der Cts./rev.
Resolution, motor enco-
der, bit width bit
Motor encoder: Sensor si-
gnal
___
Drive Properties Unit Toleran- L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
ce 051400 051400B 051400BF 091400 091400B 091400BF 171400 171400B
2-phase 2-phase 2-phase 2-phase 2-phase 2-phase 2-phase 2-phase
Drive type stepper stepper stepper stepper stepper stepper stepper stepper
motor motor motor motor motor motor motor motor
Maximum power con-
sumption W 10 10 10 10 10 10 10 10
Full
Motor resolution steps/ 200 200 200 200 200 200 200 200
rev.
Nominal voltage V 48 48 48 48 48 48 48 48
Nominal current, RMS A Typ. 4.2 4.2 4.2 4.2 4.2 4.2 4.2 4.2
Peak current, RMS A Typ. 4.2 4.2 4.2 4.2 4.2 4.2 4.2 4.2
Drive force in negative di-
rection of motion in X N Typ. 377 377 377 377 377 377 377 377
Drive force in positive di-
rection of motion in X N Typ. 377 377 377 377 377 377 377 377
Torque constant N·m/A Typ.
Resistance phase-phase Ω Typ. 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5
Inductance phase-phase mH 1.2 1.2 1.2 1.2 1.2 1.2 1.2 1.2
Back EMF, phase-phase,
rotational V/kRPM Max.
Number of pole pairs
___
Page 2
19.10.2022
WWW.PI.WS
Page3
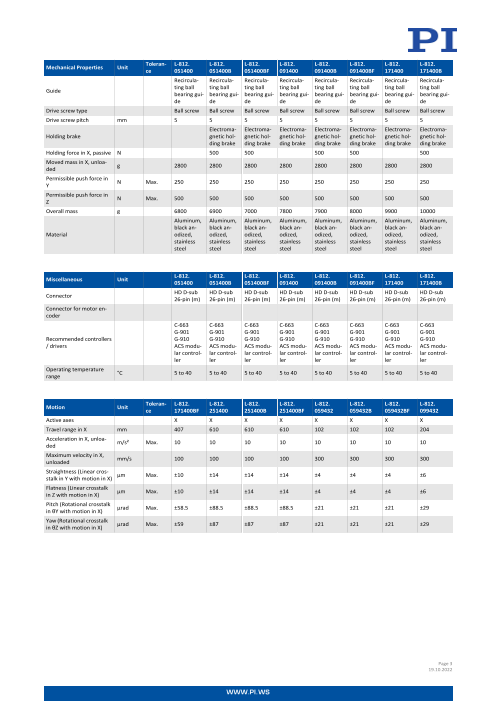
Mechanical Properties Unit Toleran- L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
ce 051400 051400B 051400BF 091400 091400B 091400BF 171400 171400B
Recircula- Recircula- Recircula- Recircula- Recircula- Recircula- Recircula- Recircula-
Guide ting ball ting ball ting ball ting ball ting ball ting ball ting ball ting ball
bearing gui- bearing gui- bearing gui- bearing gui- bearing gui- bearing gui- bearing gui- bearing gui-
de de de de de de de de
Drive screw type Ball screw Ball screw Ball screw Ball screw Ball screw Ball screw Ball screw Ball screw
Drive screw pitch mm 5 5 5 5 5 5 5 5
Electroma- Electroma- Electroma- Electroma- Electroma- Electroma- Electroma-
Holding brake gnetic hol- gnetic hol- gnetic hol- gnetic hol- gnetic hol- gnetic hol- gnetic hol-
ding brake ding brake ding brake ding brake ding brake ding brake ding brake
Holding force in X, passive N 500 500 500 500 500
Moved mass in X, unloa-
ded g 2800 2800 2800 2800 2800 2800 2800 2800
Permissible push force in
Y N Max. 250 250 250 250 250 250 250 250
Permissible push force in
Z N Max. 500 500 500 500 500 500 500 500
Overall mass g 6800 6900 7000 7800 7900 8000 9900 10000
Aluminum, Aluminum, Aluminum, Aluminum, Aluminum, Aluminum, Aluminum, Aluminum,
black an- black an- black an- black an- black an- black an- black an- black an-
Material odized, odized, odized, odized, odized, odized, odized, odized,
stainless stainless stainless stainless stainless stainless stainless stainless
steel steel steel steel steel steel steel steel
___
Miscellaneous Unit L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
051400 051400B 051400BF 091400 091400B 091400BF 171400 171400B
Connector HD D-sub HD D-sub HD D-sub HD D-sub HD D-sub HD D-sub HD D-sub HD D-sub
26-pin (m) 26-pin (m) 26-pin (m) 26-pin (m) 26-pin (m) 26-pin (m) 26-pin (m) 26-pin (m)
Connector for motor en-
coder
C-663 C-663 C-663 C-663 C-663 C-663 C-663 C-663
G-901 G-901 G-901 G-901 G-901 G-901 G-901 G-901
Recommended controllers G-910 G-910 G-910 G-910 G-910 G-910 G-910 G-910
/ drivers ACS modu- ACS modu- ACS modu- ACS modu- ACS modu- ACS modu- ACS modu- ACS modu-
lar control- lar control- lar control- lar control- lar control- lar control- lar control- lar control-
ler ler ler ler ler ler ler ler
Operating temperature
range °C 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40
___
Motion Unit Toleran- L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
ce 171400BF 251400 251400B 251400BF 059432 059432B 059432BF 099432
Active axes X X X X X X X X
Travel range in X mm 407 610 610 610 102 102 102 204
Acceleration in X, unloa-
ded m/s² Max. 10 10 10 10 10 10 10 10
Maximum velocity in X,
unloaded mm/s 100 100 100 100 300 300 300 300
Straightness (Linear cros-
stalk in Y with motion in X) µm Max. ±10 ±14 ±14 ±14 ±4 ±4 ±4 ±6
Flatness (Linear crosstalk
in Z with motion in X) µm Max. ±10 ±14 ±14 ±14 ±4 ±4 ±4 ±6
Pitch (Rotational crosstalk
in θY with motion in X) µrad Max. ±58.5 ±88.5 ±88.5 ±88.5 ±21 ±21 ±21 ±29
Yaw (Rotational crosstalk
in θZ with motion in X) µrad Max. ±59 ±87 ±87 ±87 ±21 ±21 ±21 ±29
___
Page 3
19.10.2022
WWW.PI.WS
Page4
Positioning Unit Toleran- L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
ce 171400BF 251400 251400B 251400BF 059432 059432B 059432BF 099432
Incremental Incremental Incremental Incremental
Integrated sensor rotary en- rotary en- rotary en- rotary en-
coder coder coder coder
Bidirectional repeatability
in X µm Max. ±5 ±5 ±5 ±5 ±5 ±5 ±5 ±5
Positioning accuracy in X,
uncalibrated µm Max. ±30 ±35 ±35 ±35 ±20 ±20 ±20 ±25
Minimum incremental
motion in X µm Max. 3 3 3 3 1.5 1.5 1.5 1.5
Inductive, Inductive, Inductive, Inductive, Inductive, Inductive, Inductive, Inductive,
Limit switches N/C con- N/C con- N/C con- N/C con- N/C con- N/C con- N/C con- N/C con-
tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V,
NPN NPN NPN NPN NPN NPN NPN NPN
Number of revolutions,
motor encoder, bit width bit
Resolution, motor enco-
der Cts./rev. 10000 10000 10000 10000
Resolution, motor enco-
der, bit width bit
Motor encoder: Sensor si- A/B quadra- A/B quadra- A/B quadra- A/B quadra-
gnal ture, RS- ture, RS- ture, RS- ture, RS-
422 422 422 422
___
Drive Properties Unit Toleran- L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
ce 171400BF 251400 251400B 251400BF 059432 059432B 059432BF 099432
2-phase 2-phase 2-phase 2-phase Synchro- Synchro- Synchro- Synchro-
Drive type stepper stepper stepper stepper nous servo nous servo nous servo nous servo
motor motor motor motor motor motor motor motor
Maximum power con-
sumption W 10 10 10 10
Full
Motor resolution steps/ 200 200 200 200
rev.
Nominal voltage V 48 48 48 48 310 310 310 310
Nominal current, RMS A Typ. 4.2 4.2 4.2 4.2 1.5 1.5 1.5 1.5
Peak current, RMS A Typ. 4.2 4.2 4.2 4.2 4.5 4.5 4.5 4.5
Drive force in negative di-
rection of motion in X N Typ. 377 377 377 377 800 800 800 800
Drive force in positive di-
rection of motion in X N Typ. 377 377 377 377 800 800 800 800
Torque constant N·m/A Typ. 0.43 0.43 0.43 0.43
Resistance phase-phase Ω Typ. 0.5 0.5 0.5 0.5 10.1 10.1 10.1 10.1
Inductance phase-phase mH 1.2 1.2 1.2 1.2 17.5 17.5 17.5 17.5
Back EMF, phase-phase,
rotational V/kRPM Max. 14.5 14.5 14.5 14.5
Number of pole pairs 4 4 4 4
___
Page 4
19.10.2022
WWW.PI.WS
Page5
Mechanical Properties Unit Toleran- L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
ce 171400BF 251400 251400B 251400BF 059432 059432B 059432BF 099432
Recircula- Recircula- Recircula- Recircula- Recircula- Recircula- Recircula- Recircula-
Guide ting ball ting ball ting ball ting ball ting ball ting ball ting ball ting ball
bearing gui- bearing gui- bearing gui- bearing gui- bearing gui- bearing gui- bearing gui- bearing gui-
de de de de de de de de
Drive screw type Ball screw Ball screw Ball screw Ball screw Ball screw Ball screw Ball screw Ball screw
Drive screw pitch mm 5 5 5 5 5 5 5 5
Electroma- Electroma- Electroma- Electroma- Electroma- Electroma- Electroma- Electroma-
Holding brake gnetic hol- gnetic hol- gnetic hol- gnetic hol- gnetic hol- gnetic hol- gnetic hol- gnetic hol-
ding brake ding brake ding brake ding brake ding brake ding brake ding brake ding brake
Holding force in X, passive N 500 500 500 500 500
Moved mass in X, unloa-
ded g 2800 2800 2800 2800 2800 2800 2800 2800
Permissible push force in
Y N Max. 250 250 250 250 250 250 250 250
Permissible push force in
Z N Max. 500 500 500 500 500 500 500 500
Overall mass g 10100 11900 12000 12100 7300 7400 7500 8300
Aluminum, Aluminum, Aluminum, Aluminum, Aluminum, Aluminum, Aluminum, Aluminum,
black an- black an- black an- black an- black an- black an- black an- black an-
Material odized, odized, odized, odized, odized, odized, odized, odized,
stainless stainless stainless stainless stainless stainless stainless stainless
steel steel steel steel steel steel steel steel
___
Miscellaneous Unit L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
171400BF 251400 251400B 251400BF 059432 059432B 059432BF 099432
Connector HD D-sub HD D-sub HD D-sub HD D-sub M15 9-pin M15 9-pin M15 9-pin M15 9-pin
26-pin (m) 26-pin (m) 26-pin (m) 26-pin (m) (m) (m) (m) (m)
Connector for motor en- M15 15-pin M15 15-pin M15 15-pin M15 15-pin
coder (m) (m) (m) (m)
C-663 C-663 C-663 C-663
G-901 G-901 G-901 G-901 G-901 G-901 G-901 G-901
Recommended controllers G-910 G-910 G-910 G-910 G-910 G-910 G-910 G-910
/ drivers ACS modu- ACS modu- ACS modu- ACS modu- ACS modu- ACS modu- ACS modu- ACS modu-
lar control- lar control- lar control- lar control- lar control- lar control- lar control- lar control-
ler ler ler ler ler ler ler ler
Operating temperature
range °C 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40
___
Motion Unit Toleran- L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
ce 099432B 099432BF 139432 179432 179432B 179432BF 259432 259432B
Active axes X X X X X X X X
Travel range in X mm 204 204 304 407 407 407 610 610
Acceleration in X, unloa-
ded m/s² Max. 10 10 10 10 10 10 10 10
Maximum velocity in X,
unloaded mm/s 300 300 300 300 300 300 300 300
Straightness (Linear cros-
stalk in Y with motion in X) µm Max. ±6 ±6 ±10 ±10 ±10 ±10 ±14 ±14
Flatness (Linear crosstalk
in Z with motion in X) µm Max. ±6 ±6 ±10 ±10 ±10 ±10 ±14 ±14
Pitch (Rotational crosstalk
in θY with motion in X) µrad Max. ±29 ±29 ±59 ±59 ±59 ±59 ±87 ±87
Yaw (Rotational crosstalk
in θZ with motion in X) µrad Max. ±29 ±29 ±59 ±59 ±59 ±59 ±87 ±87
___
Page 5
19.10.2022
WWW.PI.WS
Page6
Positioning Unit Toleran- L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
ce 099432B 099432BF 139432 179432 179432B 179432BF 259432 259432B
Incremental Incremental Incremental Incremental Incremental Incremental Incremental Incremental
Integrated sensor rotary en- rotary en- rotary en- rotary en- rotary en- rotary en- rotary en- rotary en-
coder coder coder coder coder coder coder coder
Bidirectional repeatability
in X µm Max. ±5 ±5 ±5 ±5 ±5 ±5 ±5 ±5
Positioning accuracy in X,
uncalibrated µm Max. ±25 ±25 ±30 ±30 ±30 ±30 ±35 ±35
Minimum incremental
motion in X µm Max. 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5
Inductive, Inductive, Inductive, Inductive, Inductive, Inductive, Inductive, Inductive,
Limit switches N/C con- N/C con- N/C con- N/C con- N/C con- N/C con- N/C con- N/C con-
tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V,
NPN NPN NPN NPN NPN NPN NPN NPN
Number of revolutions,
motor encoder, bit width bit
Resolution, motor enco-
der Cts./rev. 10000 10000 10000 10000 10000 10000 10000 10000
Resolution, motor enco-
der, bit width bit
Motor encoder: Sensor si- A/B quadra- A/B quadra- A/B quadra- A/B quadra- A/B quadra- A/B quadra- A/B quadra- A/B quadra-
gnal ture, RS- ture, RS- ture, RS- ture, RS- ture, RS- ture, RS- ture, RS- ture, RS-
422 422 422 422 422 422 422 422
___
Drive Properties Unit Toleran- L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
ce 099432B 099432BF 139432 179432 179432B 179432BF 259432 259432B
Synchro- Synchro- Synchro- Synchro- Synchro- Synchro- Synchro- Synchro-
Drive type nous servo nous servo nous servo nous servo nous servo nous servo nous servo nous servo
motor motor motor motor motor motor motor motor
Maximum power con-
sumption W
Full
Motor resolution steps/
rev.
Nominal voltage V 310 310 310 310 310 310 310 310
Nominal current, RMS A Typ. 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5
Peak current, RMS A Typ. 4.5 4.5 4.5 4.5 4.5 4.5 4.5 4.5
Drive force in negative di-
rection of motion in X N Typ. 800 800 800 800 800 800 800 800
Drive force in positive di-
rection of motion in X N Typ. 800 800 800 800 800 800 800 800
Torque constant N·m/A Typ. 0.43 0.43 0.43 0.43 0.43 0.43 0.43 0.43
Resistance phase-phase Ω Typ. 10.1 10.1 10.1 10.1 10.1 10.1 10.1 10.1
Inductance phase-phase mH 17.5 17.5 17.5 17.5 17.5 17.5 17.5 17.5
Back EMF, phase-phase,
rotational V/kRPM Max. 14.5 14.5 14.5 14.5 14.5 14.5 14.5 14.5
Number of pole pairs 4 4 4 4 4 4 4 4
___
Page 6
19.10.2022
WWW.PI.WS
Page7
Mechanical Properties Unit Toleran- L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
ce 099432B 099432BF 139432 179432 179432B 179432BF 259432 259432B
Recircula- Recircula- Recircula- Recircula- Recircula- Recircula- Recircula- Recircula-
Guide ting ball ting ball ting ball ting ball ting ball ting ball ting ball ting ball
bearing gui- bearing gui- bearing gui- bearing gui- bearing gui- bearing gui- bearing gui- bearing gui-
de de de de de de de de
Drive screw type Ball screw Ball screw Ball screw Ball screw Ball screw Ball screw Ball screw Ball screw
Drive screw pitch mm 5 5 5 5 5 5 5 5
Electroma- Electroma- Electroma- Electroma- Electroma- Electroma- Electroma- Electroma-
Holding brake gnetic hol- gnetic hol- gnetic hol- gnetic hol- gnetic hol- gnetic hol- gnetic hol- gnetic hol-
ding brake ding brake ding brake ding brake ding brake ding brake ding brake ding brake
Holding force in X, passive N 500 500 500 500 500
Moved mass in X, unloa-
ded g 2800 2800 2800 2800 2800 2800 2800 2800
Permissible push force in
Y N Max. 250 250 250 250 250 250 250 250
Permissible push force in
Z N Max. 500 500 500 500 500 500 500 500
Overall mass g 8400 8500 10400 10400 10500 10600 12500 12600
Aluminum, Aluminum, Aluminum, Aluminum, Aluminum, Aluminum, Aluminum, Aluminum,
black an- black an- black an- black an- black an- black an- black an- black an-
Material odized, odized, odized, odized, odized, odized, odized, odized,
stainless stainless stainless stainless stainless stainless stainless stainless
steel steel steel steel steel steel steel steel
___
Miscellaneous Unit L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
099432B 099432BF 139432 179432 179432B 179432BF 259432 259432B
Connector M15 9-pin M15 9-pin M15 9-pin M15 9-pin M15 9-pin M15 9-pin M15 9-pin M15 9-pin
(m) (m) (m) (m) (m) (m) (m) (m)
Connector for motor en- M15 15-pin M15 15-pin M15 15-pin M15 15-pin M15 15-pin M15 15-pin M15 15-pin M15 15-pin
coder (m) (m) (m) (m) (m) (m) (m) (m)
G-901 G-901 G-901 G-901 G-901 G-901 G-901 G-901
Recommended controllers G-910 G-910 G-910 G-910 G-910 G-910 G-910 G-910
/ drivers ACS modu- ACS modu- ACS modu- ACS modu- ACS modu- ACS modu- ACS modu- ACS modu-
lar control- lar control- lar control- lar control- lar control- lar control- lar control- lar control-
ler ler ler ler ler ler ler ler
Operating temperature
range °C 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40
___
Motion Unit Toleran- L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
ce 259432BF 059453 059453B 059453BF 099453 099453B 099453BF 179453
Active axes X X X X X X X X
Travel range in X mm 610 102 102 102 204 204 204 407
Acceleration in X, unloa-
ded m/s² Max. 10 10 10 10 10 10 10 10
Maximum velocity in X,
unloaded mm/s 300 300 300 300 300 300 300 300
Straightness (Linear cros-
stalk in Y with motion in X) µm Max. ±14 ±4 ±4 ±4 ±6 ±6 ±6 ±10
Flatness (Linear crosstalk
in Z with motion in X) µm Max. ±14 ±4 ±4 ±4 ±6 ±6 ±6 ±10
Pitch (Rotational crosstalk
in θY with motion in X) µrad Max. ±87 ±21 ±21 ±21 ±29 ±29 ±29 ±59
Yaw (Rotational crosstalk
in θZ with motion in X) µrad Max. ±87 ±21 ±21 ±21 ±29 ±29 ±29 ±59
___
Page 7
19.10.2022
WWW.PI.WS
Page8
Positioning Unit Toleran- L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
ce 259432BF 059453 059453B 059453BF 099453 099453B 099453BF 179453
Incremental Absolute Absolute Absolute Absolute Absolute Absolute Absolute
Integrated sensor rotary en- rotary en- rotary en- rotary en- rotary en- rotary en- rotary en- rotary en-
coder coder, mul- coder, mul- coder, mul- coder, mul- coder, mul- coder, mul- coder, mul-
ti-turn ti-turn ti-turn ti-turn ti-turn ti-turn ti-turn
Bidirectional repeatability
in X µm Max. ±5 ±5 ±5 ±5 ±5 ±5 ±5 ±5
Positioning accuracy in X,
uncalibrated µm Max. ±35 ±20 ±20 ±20 ±25 ±25 ±25 ±30
Minimum incremental
motion in X µm Max. 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5
Inductive, Inductive, Inductive, Inductive, Inductive, Inductive, Inductive, Inductive,
Limit switches N/C con- N/C con- N/C con- N/C con- N/C con- N/C con- N/C con- N/C con-
tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V, tact,, 5 V,
NPN NPN NPN NPN NPN NPN NPN NPN
Number of revolutions,
motor encoder, bit width bit 12 12 12 12 12 12 12
Resolution, motor enco-
der Cts./rev. 10000
Resolution, motor enco-
der, bit width bit 24 24 24 24 24 24 24
Motor encoder: Sensor si- A/B quadra-
gnal ture, RS- BiSS-C BiSS-C BiSS-C BiSS-C BiSS-C BiSS-C BiSS-C
422
___
Drive Properties Unit Toleran- L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
ce 259432BF 059453 059453B 059453BF 099453 099453B 099453BF 179453
Synchro- Synchro- Synchro- Synchro- Synchro- Synchro- Synchro- Synchro-
Drive type nous servo nous servo nous servo nous servo nous servo nous servo nous servo nous servo
motor motor motor motor motor motor motor motor
Maximum power con-
sumption W
Full
Motor resolution steps/
rev.
Nominal voltage V 310 310 310 310 310 310 310 310
Nominal current, RMS A Typ. 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5
Peak current, RMS A Typ. 4.5 4.5 4.5 4.5 4.5 4.5 4.5 4.5
Drive force in negative di-
rection of motion in X N Typ. 800 800 800 800 800 800 800 800
Drive force in positive di-
rection of motion in X N Typ. 800 800 800 800 800 800 800 800
Torque constant N·m/A Typ. 0.43 0.43 0.43 0.43 0.43 0.43 0.43 0.43
Resistance phase-phase Ω Typ. 10.1 10.1 10.1 10.1 10.1 10.1 10.1 10.1
Inductance phase-phase mH 17.5 17.5 17.5 17.5 17.5 17.5 17.5 17.5
Back EMF, phase-phase,
rotational V/kRPM Max. 14.5 14.5 14.5 14.5 14.5 14.5 14.5 14.5
Number of pole pairs 4 4 4 4 4 4 4 4
___
Page 8
19.10.2022
WWW.PI.WS
Page9
Mechanical Properties Unit Toleran- L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
ce 259432BF 059453 059453B 059453BF 099453 099453B 099453BF 179453
Recircula- Recircula- Recircula- Recircula- Recircula- Recircula- Recircula- Recircula-
Guide ting ball ting ball ting ball ting ball ting ball ting ball ting ball ting ball
bearing gui- bearing gui- bearing gui- bearing gui- bearing gui- bearing gui- bearing gui- bearing gui-
de de de de de de de de
Drive screw type Ball screw Ball screw Ball screw Ball screw Ball screw Ball screw Ball screw Ball screw
Drive screw pitch mm 5 5 5 5 5 5 5 5
Electroma- Electroma- Electroma- Electroma- Electroma- Electroma- Electroma- Electroma-
Holding brake gnetic hol- gnetic hol- gnetic hol- gnetic hol- gnetic hol- gnetic hol- gnetic hol- gnetic hol-
ding brake ding brake ding brake ding brake ding brake ding brake ding brake ding brake
Holding force in X, passive N 500 500 500 500 500
Moved mass in X, unloa-
ded g 2800 2800 2800 2800 2800 2800 2800 2800
Permissible push force in
Y N Max. 250 250 250 250 250 250 250 250
Permissible push force in
Z N Max. 500 500 500 500 500 500 500 500
Overall mass g 12700 7300 7400 7500 8300 8400 8500 10400
Aluminum, Aluminum, Aluminum, Aluminum, Aluminum, Aluminum, Aluminum, Aluminum,
black an- black an- black an- black an- black an- black an- black an- black an-
Material odized, odized, odized, odized, odized, odized, odized, odized,
stainless stainless stainless stainless stainless stainless stainless stainless
steel steel steel steel steel steel steel steel
___
Miscellaneous Unit L-812. L-812. L-812. L-812. L-812. L-812. L-812. L-812.
259432BF 059453 059453B 059453BF 099453 099453B 099453BF 179453
Connector M15 9-pin M15 9-pin M15 9-pin M15 9-pin M15 9-pin M15 9-pin M15 9-pin M15 9-pin
(m) (m) (m) (m) (m) (m) (m) (m)
Connector for motor en- M15 15-pin M15 15-pin M15 15-pin M15 15-pin M15 15-pin M15 15-pin M15 15-pin M15 15-pin
coder (m) (m) (m) (m) (m) (m) (m) (m)
G-901 G-901 G-901 G-901 G-901 G-901 G-901 G-901
Recommended controllers G-910 G-910 G-910 G-910 G-910 G-910 G-910 G-910
/ drivers ACS modu- ACS modu- ACS modu- ACS modu- ACS modu- ACS modu- ACS modu- ACS modu-
lar control- lar control- lar control- lar control- lar control- lar control- lar control- lar control-
ler ler ler ler ler ler ler ler
Operating temperature
range °C 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40
___
Motion Unit Toleran-
ce L-812.179453B L-812.179453BF L-812.259453 L-812.259453B L-812.259453BF
Active axes X X X X X
Travel range in X mm 407 407 610 610 610
Acceleration in X, unloa-
ded m/s² Max. 10 10 10 10 10
Maximum velocity in X,
unloaded mm/s 300 300 300 300 300
Straightness (Linear cros-
stalk in Y with motion in X) µm Max. ±10 ±10 ±14 ±14 ±14
Flatness (Linear crosstalk
in Z with motion in X) µm Max. ±10 ±10 ±14 ±14 ±14
Pitch (Rotational crosstalk
in θY with motion in X) µrad Max. ±59 ±59 ±87 ±87 ±87
Yaw (Rotational crosstalk
in θZ with motion in X) µrad Max. ±59 ±59 ±87 ±87 ±87
___
Page 9
19.10.2022
WWW.PI.WS
Page10
Positioning Unit Toleran-
ce L-812.179453B L-812.179453BF L-812.259453 L-812.259453B L-812.259453BF
Integrated sensor Absolute rotary en- Absolute rotary en- Absolute rotary en- Absolute rotary en- Absolute rotary en-
coder, multi-turn coder, multi-turn coder, multi-turn coder, multi-turn coder, multi-turn
Bidirectional repeatability
in X µm Max. ±5 ±5 ±5 ±5 ±5
Positioning accuracy in X,
uncalibrated µm Max. ±30 ±30 ±35 ±35 ±35
Minimum incremental
motion in X µm Max. 1.5 1.5 1.5 1.5 1.5
Limit switches Inductive, N/C con- Inductive, N/C con- Inductive, N/C con- Inductive, N/C con- Inductive, N/C con-
tact,, 5 V, NPN tact,, 5 V, NPN tact,, 5 V, NPN tact,, 5 V, NPN tact,, 5 V, NPN
Number of revolutions,
motor encoder, bit width bit 12 12 12 12 12
Resolution, motor enco-
der Cts./rev.
Resolution, motor enco-
der, bit width bit 24 24 24 24 24
Motor encoder: Sensor si-
gnal BiSS-C BiSS-C BiSS-C BiSS-C BiSS-C
___
Drive Properties Unit Toleran-
ce L-812.179453B L-812.179453BF L-812.259453 L-812.259453B L-812.259453BF
Drive type Synchronous servo Synchronous servo Synchronous servo Synchronous servo Synchronous servo
motor motor motor motor motor
Maximum power con-
sumption W
Full
Motor resolution steps/
rev.
Nominal voltage V 310 310 310 310 310
Nominal current, RMS A Typ. 1.5 1.5 1.5 1.5 1.5
Peak current, RMS A Typ. 4.5 4.5 4.5 4.5 4.5
Drive force in negative di-
rection of motion in X N Typ. 800 800 800 800 800
Drive force in positive di-
rection of motion in X N Typ. 800 800 800 800 800
Torque constant N·m/A Typ. 0.43 0.43 0.43 0.43 0.43
Resistance phase-phase Ω Typ. 10.1 10.1 10.1 10.1 10.1
Inductance phase-phase mH 17.5 17.5 17.5 17.5 17.5
Back EMF, phase-phase,
rotational V/kRPM Max. 14.5 14.5 14.5 14.5 14.5
Number of pole pairs 4 4 4 4 4
___
Mechanical Properties Unit Toleran-
ce L-812.179453B L-812.179453BF L-812.259453 L-812.259453B L-812.259453BF
Guide Recirculating ball Recirculating ball Recirculating ball Recirculating ball Recirculating ball
bearing guide bearing guide bearing guide bearing guide bearing guide
Drive screw type Ball screw Ball screw Ball screw Ball screw Ball screw
Drive screw pitch mm 5 5 5 5 5
Holding brake Electromagnetic Electromagnetic Electromagnetic Electromagnetic Electromagnetic
holding brake holding brake holding brake holding brake holding brake
Holding force in X, passive N 500 500 500 500
Moved mass in X, unloa-
ded g 2800 2800 2800 2800 2800
Permissible push force in
Y N Max. 250 250 250 250 250
Permissible push force in
Z N Max. 500 500 500 500 500
Overall mass g 10500 10600 12500 12600 12700
Aluminum, black an- Aluminum, black an- Aluminum, black an- Aluminum, black an- Aluminum, black an-
Material odized, stainless odized, stainless odized, stainless odized, stainless odized, stainless
steel steel steel steel steel
___
Page 10
19.10.2022
WWW.PI.WS
Page11
Miscellaneous Unit L-812.179453B L-812.179453BF L-812.259453 L-812.259453B L-812.259453BF
Connector M15 9-pin (m) M15 9-pin (m) M15 9-pin (m) M15 9-pin (m) M15 9-pin (m)
Connector for motor en-
coder M15 15-pin (m) M15 15-pin (m) M15 15-pin (m) M15 15-pin (m) M15 15-pin (m)
G-901 G-901 G-901 G-901 G-901
Recommended controllers G-910 G-910 G-910 G-910 G-910
/ drivers ACS modular con- ACS modular con- ACS modular con- ACS modular con- ACS modular con-
troller troller troller troller troller
Operating temperature
range °C 5 to 40 5 to 40 5 to 40 5 to 40 5 to 40
___
Note regarding the maximum velocity of the L-812.xx1400B / L-812.xx1400BF: When vertically mounted: 40 mm/s.
Note regarding the maximum velocity for L-812.xx94xx[B|BF]: A controller with 320 V DC intermediate voltage is necessary for reaching the maximum velocity. With this intermediate voltage
the maximum velocity is reached both in an unloaded state and when fully loaded (50kg).
Note regarding the design resolution of the L-812.xx1400[B|BF]: Value valid for full-step mode (full steps of 1.8°)
Note regarding the moved mass: With L-812.TT1 platform: 3.4 kg.
Note regarding the permissible push force in Z for L-812.xxxxxxB / L-812.xxxxxxBF: When vertically mounted: 300 N.
For more information on the torques permitted for loading the L-812, see the diagram of load limits
Technical data is specified on a granite table with a flatness of ±2µm.
___
Drawings / Images
Load limit of the L-812 depending on the load mass and the distance of the center of gravity of the load from the center of the slider
Page 11
19.10.2022
WWW.PI.WS
Page12
Drawings / Images
L-812.xx94xx[B[F]], dimensions in mm
Page 12
19.10.2022
WWW.PI.WS
Page13
Drawings / Images
L-812.xx1400[B[F]], dimensions in mm
Page 13
19.10.2022
WWW.PI.WS
Page14
Drawings / Images
L-812.179432 with mounted L-812.TT1 motion platform
L-812 XY combination with optional L-812.TT1 motion platform on top positioner
Page 14
19.10.2022
WWW.PI.WS
Page15
Drawings / Images
XY combination of V-857.586211E0 (bottom) and L-812.099432BF (top)
Gantry setup of two V-857, two V-817, and one L-812
Page 15
19.10.2022
WWW.PI.WS
Page16
Order Information
L-812.051400
High-load linear stage; 2-phase stepper motor; 102 mm travel range; 500 N load capacity; 100 mm/s maximum velocity; ball
screw
L-812.051400B
High-load linear stage; 2-phase stepper motor; 102 mm travel range; 500 N load capacity; 100 mm/s maximum velocity; ball
screw; electromagnetic holding brake
L-812.051400BF
High-load linear stage; 2-phase stepper motor; 102 mm travel range; 500 N load capacity; 100 mm/s maximum velocity; ball
screw; electromagnetic holding brake; folded drivetrain
L-812.091400
High-load linear stage; 2-phase stepper motor; 204 mm travel range; 500 N load capacity; 100 mm/s maximum velocity; ball
screw; electromagnetic holding brake
L-812.091400B
High-load linear stage; 2-phase stepper motor; 204 mm travel range; 500 N load capacity; 100 mm/s maximum velocity; ball
screw; electromagnetic holding brake
L-812.091400BF
High-load linear stage; 2-phase stepper motor; 204 mm travel range; 500 N load capacity; 100 mm/s maximum velocity; ball
screw; electromagnetic holding brake; folded drivetrain
L-812.171400
High-load linear stage; 2-phase stepper motor; 407 mm travel range; 500 N load capacity; 100 mm/s maximum velocity; ball
screw; electromagnetic holding brake
L-812.171400B
High-load linear stage; 2-phase stepper motor; 407 mm travel range; 500 N load capacity; 100 mm/s maximum velocity; ball
screw; electromagnetic holding brake
L-812.171400BF
High-load linear stage; 2-phase stepper motor; 407 mm travel range; 500 N load capacity; 100 mm/s maximum velocity; ball
screw; electromagnetic holding brake; folded drivetrain
L-812.251400
High-load linear stage; 2-phase stepper motor; 610 mm travel range; 500 N load capacity; 100 mm/s maximum velocity; ball
screw; electromagnetic holding brake
L-812.251400B
High-load linear stage; 2-phase stepper motor; 610 mm travel range; 500 N load capacity; 100 mm/s maximum velocity; ball
screw; electromagnetic holding brake
L-812.251400BF
High-load linear stage; 2-phase stepper motor; 610 mm travel range; 500 N load capacity; 100 mm/s maximum velocity; ball
screw; electromagnetic holding brake; folded drivetrain
Page 16
19.10.2022
WWW.PI.WS
Page17
Order Information
L-812.059432
High-load linear stage; synchronous servo motor to 310 V; 102 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; incremental rotary encoder; electromagnetic holding brake
L-812.059432B
High-load linear stage; synchronous servo motor to 310 V; 102 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; incremental rotary encoder; electromagnetic holding brake
L-812.059432BF
High-load linear stage; synchronous servo motor to 310 V; 102 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; incremental rotary encoder; electromagnetic holding brake; folded drivetrain
L-812.099432
High-load linear stage; synchronous servo motor to 310 V; 204 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; incremental rotary encoder; electromagnetic holding brake
L-812.099432B
High-load linear stage; synchronous servo motor to 310 V; 204 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; incremental rotary encoder; electromagnetic holding brake
L-812.099432BF
High-load linear stage; synchronous servo motor to 310 V; 204 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; incremental rotary encoder; electromagnetic holding brake; folded drivetrain
L-812.139432
High-load linear stage; synchronous servo motor to 310 V; 304 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; incremental rotary encoder; electromagnetic holding brake
L-812.179432
High-load linear stage; synchronous servo motor to 310 V; 407 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; incremental rotary encoder; electromagnetic holding brake
L-812.179432B
High-load linear stage; synchronous servo motor to 310 V; 407 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; incremental rotary encoder; electromagnetic holding brake
L-812.179432BF
High-load linear stage; synchronous servo motor to 310 V; 407 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; incremental rotary encoder; electromagnetic holding brake; folded drivetrain
L-812.259432
High-load linear stage; synchronous servo motor to 310 V; 610 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; incremental rotary encoder; electromagnetic holding brake
L-812.259432B
High-load linear stage; synchronous servo motor to 310 V; 610 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; incremental rotary encoder; electromagnetic holding brake
Page 17
19.10.2022
WWW.PI.WS
Page18
Order Information
L-812.259432BF
High-load linear stage; synchronous servo motor to 310 V; 610 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; incremental rotary encoder; electromagnetic holding brake; folded drivetrain
L-812.059453
High-load linear stage; synchronous servo motor to 310 V; 102 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; absolute rotary encoder, multiturn; electromagnetic holding brake
L-812.059453B
High-load linear stage; synchronous servo motor to 310 V; 102 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; absolute rotary encoder, multiturn; electromagnetic holding brake
L-812.059453BF
High-load linear stage; synchronous servo motor to 310 V; 102 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; absolute rotary encoder, multiturn; electromagnetic holding brake; folded drivetrain
L-812.099453
High-load linear stage; synchronous servo motor to 310 V; 204 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; absolute rotary encoder, multiturn; electromagnetic holding brake
L-812.099453B
High-load linear stage; synchronous servo motor to 310 V; 204 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; absolute rotary encoder, multiturn; electromagnetic holding brake
L-812.099453BF
High-load linear stage; synchronous servo motor to 310 V; 204 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; absolute rotary encoder, multiturn; electromagnetic holding brake; folded drivetrain
L-812.179453
High-load linear stage; synchronous servo motor to 310 V; 407 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; absolute rotary encoder, multiturn; electromagnetic holding brake
L-812.179453B
High-load linear stage; synchronous servo motor to 310 V; 407 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; absolute rotary encoder, multiturn; electromagnetic holding brake
L-812.179453BF
High-load linear stage; synchronous servo motor to 310 V; 407 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; absolute rotary encoder, multiturn; electromagnetic holding brake; folded drivetrain
L-812.259453
High-load linear stage; synchronous servo motor to 310 V; 610 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; absolute rotary encoder, multiturn; electromagnetic holding brake
L-812.259453B
High-load linear stage; synchronous servo motor to 310 V; 610 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; absolute rotary encoder, multiturn; electromagnetic holding brake
L-812.259453BF
High-load linear stage; synchronous servo motor to 310 V; 610 mm travel range; 500 N load capacity; 300 mm/s maximum velo-
city; ball screw; absolute rotary encoder, multiturn; electromagnetic holding brake; folded drivetrain
Page 18
19.10.2022
WWW.PI.WS