


ピエゾを用いた高速、高精度ミラー駆動製品のご紹介。各製品の特長や、動作原理、動作例など掲載しています。
私達、ピーアイジャパン株式会社、本社ドイツ
PI (Physik Instrumente )社は、機械設計開発、内
部ピエゾアクチュエータの製造開発、エレクトロニクスの製造開発、ソフトウエアなど、精密位置決めに必要な
製品をほぼ、独自開発・自主生産を行っております 。またお客様に合わせたカスタマイズ も対応可能です。
<ピエゾチップ
/チルトステージの主な特徴>
■摩擦のないフレクシャガイドを使用
■1つの筐体で、チップ /チルトあるいはチップ /チルト /リニア駆動が可能
■回転中心は 1つのみ
■高剛性のため高速応答
■フィードバックセンサーを内蔵し高い信頼性
■ナノラジアンの分解能
■高いリニアリティ
■非常に優れた再現性
■ガルバノスキャナや
-ボイスコイルタイプよりも高剛性、高リニアリティ、高安定性、1つの回転中心
■アプリケーションに沿ったチューニングによる最適化が可能
関連メディア
このカタログについて
| ドキュメント名 | 高精度ミラー制御にピエゾ方式システムのご紹介 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 1.2Mb |
| 取り扱い企業 | ピーアイ・ジャパン株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
表紙は自社の商品がよく映った写真に変更してください。
PI(Physik Instrumente)社
ピエゾチップ/チルトステージシリーズのご紹介
ピーアイ・ジャパン株式会社
Page2
PI社のピエゾチップ/チルトステージ
私達、ピーアイジャパン株式会社、本社ドイツ PI(Physik Instrumente)社は、機械設計開発、内
部ピエゾアクチュエータの製造開発、エレクトロニクスの製造開発、ソフトウエアなど、精密位置決めに必要な
製品をほぼ、独自開発・自主生産を行っております。またお客様に合わせたカスタマイズも対応可能です。
<ピエゾチップ/チルトステージの主な特徴>
■摩擦のないフレクシャガイドを使用
■1つの筐体で、チップ/チルトあるいはチップ/チルト/リニア駆動が可能
■回転中心は1つのみ
■高剛性のため高速応答
■フィードバックセンサーを内蔵し高い信頼性
■ナノラジアンの分解能
■高いリニアリティ
■非常に優れた再現性
■ガルバノスキャナや-ボイスコイルタイプよりも高剛性、高リニアリティ、高安定性、1つの回転中心
■アプリケーションに沿ったチューニングによる最適化が可能
PI社ついて
PI社(Physik Instrumente社)はドイツ・カールスルーエを本拠地とし50年以上に渡り精密位置
決めピエゾステージ・アクチュエータ・多軸ステージを提供してきました。この精密位置決め技術分野では、
グローバル市場を常に牽引しています。
精密位置決めのエキスパートが対応いたしますので、ぜひお気軽に御相談ください。
www.pi-japan.jp/info@pi-japan.jp
TEL:044-280-7676
Page3
特徴
【動作原理】
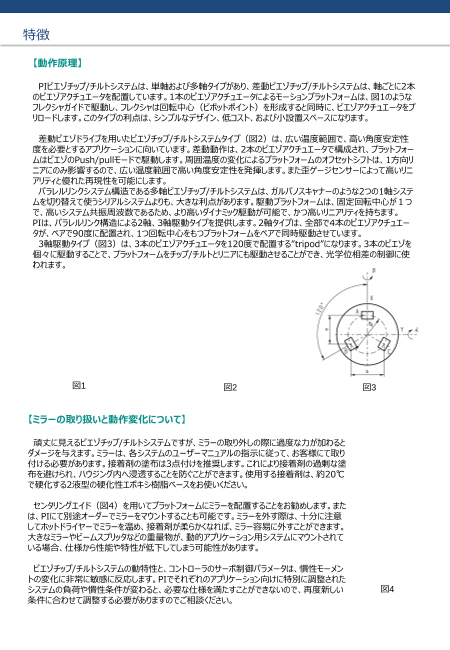
PIピエゾチップ/チルトシステムは、単軸および多軸タイプがあり、差動ピエゾチップ/チルトシステムは、軸ごとに2本
のピエゾアクチュエータを配置しています。1本のピエゾアクチュエータによるモーションプラットフォームは、図1のような
フレクシャガイドで駆動し、フレクシャは回転中心(ピボットポイント)を形成すると同時に、ピエゾアクチュエータをプ
リロードします。このタイプの利点は、シンプルなデザイン、低コスト、および小設置スペースになります。
差動ピエゾドライブを用いたピエゾチップ/チルトシステムタイプ(図2)は、広い温度範囲で、高い角度安定性
度を必要とするアプリケーションに向いています。差動動作は、2本のピエゾアクチュエータで構成され、プラットフォー
ムはピエゾのPush/pullモードで駆動します。周囲温度の変化によるプラットフォームのオフセットシフトは、1方向リ
ニアにのみ影響するので、広い温度範囲で高い角度安定性を発揮します。また歪ゲージセンサーによって高いリニ
アリティと優れた再現性を可能にします。
パラレルリンクシステム構造である多軸ピエゾチップ/チルトシステムは、ガルバノスキャナーのような2つの1軸システ
ムを切り替えて使うシリアルシステムよりも、大きな利点があります。駆動プラットフォームは、固定回転中心が1つ
で、高いシステム共振周波数であるため、より高いダイナミック駆動が可能で、かつ高いリニアリティを持ちます。
PIは、パラレルリンク構造による2軸、3軸駆動タイプを提供します。2軸タイプは、全部で4本のピエゾアクチュエー
タが、ペアで90度に配置され、1つ回転中心をもつプラットフォームをペアで同時駆動させています。
3軸駆動タイプ(図3)は、3本のピエゾアクチュエータを120度で配置する”tripod”になります。3本のピエゾを
個々に駆動することで、プラットフォームをチップ/チルトとリニアにも駆動させることができ、光学位相差の制御に使
われます。
図1 図2 図3
【ミラーの取り扱いと動作変化について】
頑丈に見えるピエゾチップ/チルトシステムですが、ミラーの取り外しの際に過度な力が加わると
ダメージを与えます。ミラーは、各システムのユーザーマニュアルの指示に従って、お客様にて取り
付ける必要があります。接着剤の塗布は3点付けを推奨します。これにより接着剤の過剰な塗
布を避けられ、ハウジング内へ浸透することを防ぐことができます。使用する接着剤は、約20℃
で硬化する2液型の硬化性エポキシ樹脂ベースをお使いください。
センタリングエイド(図4)を用いてプラットフォームにミラーを配置することをお勧めします。また
は、PIにて別途オーダーでミラーをマウントすることも可能です。ミラーを外す際は、十分に注意
してホットドライヤーでミラーを温め、接着剤が柔らかくなれば、ミラー容易に外すことができます。
大きなミラーやビームスプリッタなどの重量物が、動的アプリケーション用システムにマウントされて
いる場合、仕様から性能や特性が低下してしまう可能性があります。
ピエゾチップ/チルトシステムの動特性と、コントローラのサーボ制御パラメータは、慣性モーメン
トの変化に非常に敏感に反応します。PIでそれぞれのアプリケーション向けに特別に調整された
システムの負荷や慣性条件が変わると、必要な仕様を満たすことができないので、再度新しい 図4
条件に合わせて調整する必要がありますのでご相談ください。
Page4
製品ラインナップ
型式 S-224/226型 S-310~316型 S-325型
外観
駆動軸 Θx軸 Z軸, Z/Θx/Θy軸 Z/Θx/Θy軸
駆動角度 2.2 mrad Z: 6, 12 µm Z: 30 µm
(open loop) θxθy: 5 mrad
θxθy: 600~1200µrad (open loop)
2.0 mrad
(closed loop) Z: 30 µm
4 mrad
(closed loop)
内蔵 歪ゲージセンサー 歪ゲージセンサー 歪ゲージセンサー
センサー
分解能: 0.1 / 0.05 µrad Z: 0.1~ nm, Z: 0.5 nm
Open/Clos θxθy: 0.02~ µrad θxθy: 0.05 µrad
ed loop (Open) (Open)
Z: 0.4 nm Z: 0.6 nm
θxθy: 0.1 µrad θxθy: 0.1 µrad
(Closed: S-316) (Closed: S-325.3Sx)
リニアリティ: 0.2 % 0.2 % -
共振 9 kHz: 無負荷時 5.5~9.5 kHz: 無負荷時 2 kHz: 無負荷時
周波数
7.5 kHz: Ø 15 mm 4.1~6.5 kHz: Ø 15 mm 1 kHz: Ø 25 mm × 8
× 4 mm mirror時 × 4 mm mirror時 mm mirror時
自重 98 g 45~ g 65 g
備考 glass mirror付属 開口: φ10mm <1“ミラーサイズ
Page5
製品ラインナップ
S-330型 S-331型 S-335型 S-340型
Θx/Θy軸 Θx/Θy軸 Θx/Θy軸 Θx/Θy軸
3.5~15 mrad 4.2~7 mrad ±17.5 mrad 2 mrad
(open loop) (open loop) (closed loop) (open loop)
2~10 mrad 3~5 mrad 2 mrad
(closed loop) (closed loop) (closed loop)
歪ゲージセンサー 歪ゲージセンサー 歪ゲージセンサー 歪ゲージセンサー
0.02~ µrad 0.05~0.1 µrad 0.1 µrad 0.02 µrad
(Open) (Open) (Open) (Open)
0.05~ µrad 0.1~0.25 µrad 1 µrad 0.2 µrad
(Closed: S- (Closed: S- (Closed) (Closed: S-340.xSx)
330.xSx) 331.xSx)
0.05~ % 0.1~ % 0.05 % 0.1 %
1~2.4 kHz: 無負荷時 12 ~16 kHz: 無負 2 kHz: 無負荷時 1.1 kHz: 無負荷時
荷時
1~1.6 kHz: 1.6 kHz: 0.85 kHz: Ø 50 mm
Ø 25 mm × 8 mm 9~10 kHz: Ø 12.5 mm × 3 × 13 mm mirror時
mirror時 Ø 12.7 mm × 3 mm mirror時
mm mirror時
0.2~Kg 0.13~Kg 0.32~Kg 0.355~Kg
プラットフォーム: プラットフォーム: プラットフォーム: プラットフォーム:
チタン チタン チタン アルミ、インバー
<2 “ミラーサイズ <0.5“ミラーサイズ 0.5“&1”ミラー <φ100mm
オプション ミラーサイズ
Page6
ピエゾチップ/チルトシステムの動作特徴
<ヒステリシス>
オープンループシステムの場合、変位曲線は、ピエゾセラ
ミックの強誘電分極効果に起因する強いヒステリシスを示
します。電圧変位曲線は、変位量の10~15%のエラー
になります(図5)。
位置制御するPIのClosed loopピエゾチップ/チルトシス
テムは、この効果を最小限(約0.2%)にします。システ
ムは高い絶対精度、リニアリティ、ナノラジアン、サブナノラ
ジアンの再現性が達成することができます。
図5
<共振周波数>
高ダイナミクスアプリケーションの最も重要な技術的特
徴の1つは、ピエゾチップ/チルトシステムの剛性です。共
振周波数は、剛性の関数として使われシステムを適合す
るのに利用します。通常、位置決めアプリケーションの共
振周波数はかなり低いです。クローズドループオペレーショ
ンでは、最大安全動作周波数も位相やシステムのアンプ
応答によって制限されます。この場合、機械的共振周波
数が高ければ、より高い制御バンド幅でセットすることがで
きます。共振周波数は、ピエゾチップ/チルトシステムにマ
ウントされている重さがダイレクトに依存します。動作する
重さが大きいとダイナミックパフォーマンスは減少します。
(図6では、無負荷、1/2インチミラー、1インチミラーでの
1次共振周波数を示しています。)
図6
<ステップ応答>
高速応答動作は、ピエゾアクチュエータの特徴です。動作電圧の急激な変化で、ピエゾアクチュエータも急激
に変化し、チップ/チルトプラットフォームの位置も高速に変化します。制御電圧が急激に上昇した場合、ピエ
ゾアクチュエータに十分な電圧供給があれば、共振周波数の約1/3で変位します。ただこの場合、ターゲット
位置では強いオーバーシュートが生じます。
Page7
ピエゾチップ/チルトシステムの動作特徴
<セットリングタイム>
図7は、S-335.2SHピエゾシステムのステップ応答になり、標準パフォーマンスになります。システムのス
テップ応答は、サーボコントローラのチューニングによって変わります。例えばミラーサイズによって荷重が変わ
ると、S-335.2SHシステムの50%ステップ(17.5mrad, Open loop)応答も変化します(図8)。
図7
図8
Page8
ピエゾチップ/チルトシステムの動作特徴
<位置決め再現性>
位置決め再現性は、ピエゾチップ/チルトシステムの実際の変位量と使用するセンサーによって異なります。基
本的には、大きな動作量よりも、小さな動作量のほうが再現性は高くなります。歪ゲージセンサー(SGS)は、
ほとんどのピエゾチップ/チルトシステムに備わっており、十分な分解能を提供し、スペース制約があるシステムに
使われます。ピエゾアクチュエータに直接取り付けられたSGSを評価することで、実際の位置は目標位置に常
に同期されます。残留誤差は、間接的な位置計測であるSGSの技術に起因します。ピエゾの変位は、プラッ
トフォームの位置を特定することが可能です。ご要望に応じて、システムの再現性はPIで計測できます。100
ポイントの測定点が記録され、ターゲットと実際の位置の偏差は、“Position error”となります。図9(左グラ
フ)は、S-335.2SHピエゾシステムの測定値を示し、偏差は右側に示されたヒストグラムとなります。
図9
<連続動作による発熱>
長時間の動作は、駆動周波数によって発熱を制限することがあります。ピエゾアクチュエータは容量性負荷の
ような振る舞いで、この電流の充電や放電は駆動周波数とともに増加します。さらに動作周波数に加えて、
チップ/チルトシステムの熱電力損失は電圧変位量に依存し、電力損失の2乗になります。ピエゾセラミックの
電力損失は、印加電力の約8~12%になるため、高周波数や高アンプでは冷却が必要となる場合がありま
す。
(図10は、S-331.2SLピエゾチップ/チルトシステムが、制御電圧100V、サイン波動作周波数2000Hzで
駆動した際の温度変化になります。温度変化は、セラミックにて計測)
このような高速駆動アプリケーションに対応
するために、必要な倍は空冷方式のミラー
ピエゾステージも設計製造可能です。
図10
Page9
制御について
【適したコントローラの選択】
PIは、ピエゾチップ/チルトシステムを制御するためのアナログとデジタルコントローラを提供します。
<アナログコントローラ>
・外部からのアナログ制御信号をメインで使い、動的な動作要求が高い(高周波、高速など)アプリケーションには、高出
力アナログコントローラの使用を推奨します。また外部センサーからのノイズキャンセリング的な用途、複雑な動作波形が必
要な動作の場合もアナログ制御が向いており、内部歪ゲージセンサーのモニター信号と比較することが容易です。
例えば、最大10mrad駆動のミラーピエゾは、0~+10Vの入力信号によって、0~+10mrad駆動します。外部から
10mVのアナログ電圧を印加すると、ミラーは、10µrad傾けることができます。
Closed loop
高精度ファンクションジェネレータ
DAC等 信号発生器
センサーモニター出力信号:
アナログ制御入力信号:0~+10V
0~+10V
=>ミラーピエゾ:0~フルストローク
LASER
10V
5V
xxHz
0V
オシロスコープ等
<デジタルコントローラ>
・荷重の変更などに伴うシステムパフォーマンスの要求変更が必要なアプリケーションや、静的動作にはデジタルコントローラを
お勧めします。ピエゾチップ/チルトシステムの中のIDチップによって個々サーボ制御パラメータは、ボタンを押すだけでデジタル
コントローラへチューニングデータが転送され、コントローラとピエゾシステムの最適化ができるため素早く交換することができま
す。
PIMikroMoveソフトウェアとの組み合わせで、デジタルコントローラは幅広い機能と、診断およびプロセス制御の計測値を
表示するオプションを提供します。また、コントローラは、Dynamic Link Library (DLL)制御ロジックや、LabVIEWドライ
バなどにも対応しています。
Page10
アプリケーション例
【レーザー溶接のためのビーム焦点制御ミラーピエゾ】
ピエゾ駆動レーザーフォーカスシフターモジュールは、レーザー加
工アプリケーションの速度と品質を向上させます。
ワークピースのビーム焦点をアクティブにピエゾでシフトすることで、
レーザービーム切断中の金属板の送り速度を上げることが可能
です。また、溶接シームの品質とプロセスの安定性を向上させる
こともできます。PIは、フラウンホーファーIOF、フラウンホーファー
IWS、および産業パートナーであるKjellberg Finsterwalde、
Heliatek、Optics Balzersと協力して、高ダイナミクスZ軸
フォーカスシフターモジュールを開発しました。このモジュールは、
従来の方法やXY加工面での2Dビーム操作と組み合わせるこ
とができ、ビーム軸方向に非常に動的なZ軸フォーカス操作機
能を追加して、加工速度を上げながら品質も向上させます。
アダプティブミラーによるフォーカスシフトと、ピエゾ駆動変形ミラー。
ミラーピエゾは最大2kHzの動作周波数で、焦点位置を最大15mmにシフトさせることが可能です。
【眼科手術におけるTip/Tiltミラーピエゾの役割】
ピエゾアクチュエータ駆動方式のメカニズムは、無菌であるセラミック設計や潤
滑油がない機構など、ライフサイエンスや医療工学のアプリケーションで求めら
れているさまざまな機能を提供します。ピエゾセラミックは、非磁性でもあり、
強磁場に基づく高エネルギーイメージング/スキャンのメリットがあります。
ナノラジアンの高分解能をもつピエゾTip/Tiltシステムは、高精度かつ高リニ
アリティ、高速性を兼ね備えています。
光学ガラスを使用した視力矯正は、中世時代にまでさかのぼります。角膜を
「形成する」ための外科的手法の最初の臨床研究は、前世紀に始まりまし
た。レーザーの出現により、手術メスは、高エネルギー光子に置き換えられ、
角膜の湾曲に合わせて視力を矯正する多くの異なるレーザー法が確立され
ました。
レーザービームを制御するには、最高の精度が必要です。ピエゾ駆動によるTip/Tilt
ナノポジショニングシステムは、これらすべてのアプリケーションに最適です
【 PI社製のチップ/チルトユニットが太陽の謎の解明をサポート】
2020年2月、宇宙探査機>>ソーラーオービター が打ち上げられました。
中心的な観測装置であるPolarimetric and Helioseismic Imager
(PHI)の副鏡として、PI社製のチップ/チルトユニットも搭載されました。
オービターに搭載された異なる10台の機器のうち特に重要なのが、Max
Planck Institute for Solar System ResearchとLeibniz Institute for
Solar Physicsが共同で開発したPolarimetric and Helioseismic
Imager (PHI)です。>> PHIは、太陽の表面(光球)の画像を可視光スペ
クトルで提供します。この超高温と高真空の両方で確実に機能するミラー
太陽に近づくソーラーオービター(画像:ESA /
ピエゾしシステムは、変位:±295 µrad、帯域幅:300 Hz、共振周波 ATG medialab)
数(負荷時):1.3 kHzの特殊チタン製になります。
Page11
<各種お問合せ、ご相談>
ピーアイ・ジャパン株式会社
212-0013 神奈川県川崎市幸区堀川町580番地
ソリッドスクエア西館17F
TEL:044-280-7676
info@pi-japan.jp
ウエブサイト
http://www.pi-japan.jp
*本冊子の情報は2020/12/1現在のものです。仕様は予告なく変更される可能性があります。
BROJP_MIRROR PIEZO_2020.12.01