


5種類のロボット内製事例をご紹介しています。
こちらの概要資料は、その内の1種です。
1) ワーク投入_整列(垂直多関節ロボット)
2) ワーク組立_圧入(直交ロボット)
3) ワーク外観検査(水平多関節ロボット)
4) ワーク分解工程(パラレルリンクロボット)
5) ワーク搬送(AGV・AMR)
本紙では、デモ機の使用製品、動作などを掲載しています。
当社製品で構成したときの具体的なスペックや装置イメージができるため、内製を検討されている方におすすめです。
このカタログについて
| ドキュメント名 | ワーク分解工程(パラレルリンクロボット)の概要資料 |
|---|---|
| ドキュメント種別 | 事例紹介 |
| ファイルサイズ | 1.3Mb |
| 登録カテゴリ | |
| 取り扱い企業 | オリエンタルモーター株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
モーションシステム複合デモ機
モジュール 4 (ワーク分解⼯程)
概要資料
Page2
目次
1.モーションシステム複合デモ機 モジュール 4(ワーク分解工程)について....................................3
2.モーションシステム複合デモ機 モジュール 4 のロボット仕様 ........................................................3
3.デモ機(ロボットを中心とした)主な寸法(参考) ..........................................................................4
4.使用製品 .............................................................................................................................................. 5
4-1.機構部 ....................................................................................................................................... 5
4-2.制御部 ....................................................................................................................................... 5
5.システム構成 ....................................................................................................................................... 6
6.デモ機の動作(参考) ........................................................................................................................7
7.MRC Studio の設定 ............................................................................................................................... 8
8.パラレルリンクロボットの作業待機位置 ............................................................................................9
注意事項
1)本資料は当社のデモ機においての内容を参考事例として記したものになります。
機器個別の操作や組み立て、設置および配線方法に関しては記載しておりません。
必要に応じて対象製品の取扱説明書を参照するか、機器メーカーまでお問い合わせください。
2)当社のデモ機は本資料を元に製作した一例です。
本資料を参考に装置を検討する際には、安全対策を含め十分評価の上、採否につきましては
お客様でご判断願います。
3)本資料の一部または全部を、オリエンタルモーター株式会社の許可なしに複写、複製、
再配布することを禁じます。
4)本資料の記載内容は、2023 年 11 月時点のものです。
記載内容は改良のため予告なく変更されることがあります。
Page3
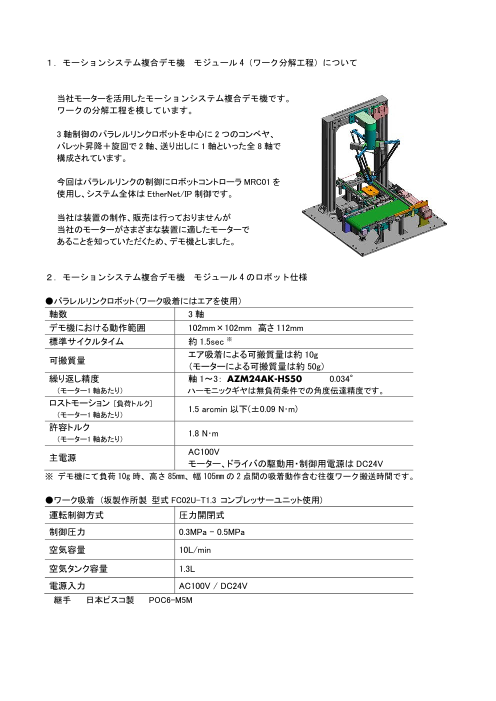
1.モーションシステム複合デモ機 モジュール 4(ワーク分解工程)について
当社モーターを活用したモーションシステム複合デモ機です。
ワークの分解工程を模しています。
3 軸制御のパラレルリンクロボットを中心に 2 つのコンベヤ、
パレット昇降+旋回で 2 軸、送り出しに 1 軸といった全 8 軸で
構成されています。
今回はパラレルリンクの制御にロボットコントローラ MRC01 を
使用し、システム全体は EtherNet/IP 制御です。
当社は装置の制作、販売は行っておりませんが
当社のモーターがさまざまな装置に適したモーターで
あることを知っていただくため、デモ機としました。
2.モーションシステム複合デモ機 モジュール 4 のロボット仕様
●パラレルリンクロボット(ワーク吸着にはエアを使用)
軸数 3 軸
デモ機における動作範囲 102mm×102mm 高さ 112mm
標準サイクルタイム 約 1.5sec ※
エア吸着による可搬質量は約 10g
可搬質量
(モーターによる可搬質量は約 50g)
繰り返し精度 軸 1~3: AZM24AK-HS50 0.034°
(モーター1 軸あたり) ハーモニックギヤは無負荷条件での角度伝達精度です。
ロストモーション [負荷トルク]
1.5 arcmin 以下(±0.09 N・m)
(モーター1 軸あたり)
許容トルク
1.8 N・m
(モーター1 軸あたり)
AC100V
主電源
モーター、ドライバの駆動用・制御用電源は DC24V
※ デモ機にて負荷 10g 時、高さ 85mm、幅 105mm の 2 点間の吸着動作含む往復ワーク搬送時間です。
●ワーク吸着 (坂製作所製 型式 FC02U-T1.3 コンプレッサーユニット使用)
運転制御方式 圧力開閉式
制御圧力 0.3MPa - 0.5MPa
空気容量 10L/min
空気タンク容量 1.3L
電源入力 AC100V / DC24V
継手 日本ピスコ製 POC6-M5M
Page4
3.デモ機(ロボットを中心とした)主な寸法(参考)
600
216 430
100
単位:mm
175
147
600
610
Page5
4.使用製品
4-1.機構部
1
1
3 5
2 6
4
当社デモ機で使用する製品は以下になります。
No. 軸名 製品名 部品名 数量
1 軸1~3 AZM24AK-HS50 AZ ハーモニックギヤードモーター 減速比 50 3
2 軸 4 BLM230HP-10S ブラシレスモーター 減速比 10 1
3 軸 5 AZM66AKH-TS7.2U AZ TS ギヤードモーター 減速比 7.2 1
4 軸 6 EZSM3D010AZAK 電動スライダ 1
5 軸 7 EZSM3D005AZMK 電動スライダ(電磁ブレーキ付) 1
6 軸 8 AZM66AKH AZ モーター 1
4-2.制御部
ロボットコントローラ: MRC01 1 台
モータードライバ:
位置決め機能内蔵タイプ AZD-KD (軸 1-3,5-8 用)各 1 台
ドライバ BMUD30-A2 (軸 4 用) 1 台
モーターケーブル:
接続ケーブル(3m) CC030VZ2F2 (軸 1-3 用) 3 本
接続ケーブル(1.5m) CC015KHBLV (軸 4 用) 1 本
接続ケーブル(2m) CCM020Z1CVF (軸 5 用) 1 本
接続ケーブル(1.5m) CC015VZF2 (軸 6 用) 1 本
接続ケーブル(1.5m) CC015VZFB2 (軸 7 用) 1 本
可動接続ケーブル(2m) CCM020Z1CBR (軸 8 用) 1 本
主な上位制御機器:
CPUユニット 他 KV-8000 他 (キーエンス社製)
コンプレッサーユニット 他 FC02U-T1.3 他 (坂製作所製)
※ DC24V 電源、上位制御機器はお客様にてご用意ください。
Page6
5.システム構成
本デモ機でのシステム構成事例です。
上 位制御機器
(キーエンス社製
KV-8000)
■パラレルリンクロボット
ロボットコントローラ
MRC01 ドライバ
AZD-KD
AZ シリーズ、ハーモニックギヤードモーター
軸 1 AZM24AK-HS50
AZ シリーズ、ハーモニックギヤードモーター
軸 2 AZM24AK-HS50
AZ シリーズ、ハーモニックギヤードモーター
軸 3 AZM24AK-HS50
■パレット搬送、昇降旋回
AZ シリーズ、TS ギヤードモーター
軸 4
AZM66AKH-TS7.2U
電動スライダ
軸 5
EZSM3D010AZAK
電動スライダ
軸 6
EZSM3D005AZMK
AZ シリーズ
軸 7
AZM66AKH
ドライバ
BMUD30-A2
BMU シリーズ
軸 8
BLM230HP-10S
EtherNet/IP
Modbus RTU
I/O
Page7
6.デモ機の動作(参考)
コンベヤで流れてきたワークを分解処理する工程をイメージしたデモ機です。
パラレルリンクのアーム駆動部分に、ロボットコントローラ MRC01 を使用することで、
モーション制御による直線補間、パレタイジング動作を実現しています。
パラレルリンク先端は、エアによりワークを吸着・脱着しています。
① コンベヤによるパレット搬送 → 定位置停止後にパレット上昇して固定。動作開始。
② ワーク上部のみ吸着し、同一パレット内に配置。
終了したらパレットを 180 度旋回し、後工程へコンベヤ搬送。
Page8
7.MRC Studio の設定
本デモ機のロボットタイプ選択や機構情報は以下のとおりです。
一連の初期設定をウィザード形式でおこなうことができます。
設定後の情報確認は、各種モニタで可能です。
■ロボット情報モニタ
Axis1
Axis2
Axis3
デモ機と対象軸の位置関係
Page9
■軸情報モニタ( Axis1,2,3 共通 )
8.パラレルリンクロボットの作業待機位置
写真が作業待機位置になります。
先端中心座標:
X,Y,Z=(0,0,60) 単位[mm]
以上
Page10
改訂履歴 内容
2023/11/20 新規作成
●ハーモニックプラネタリ、ハーモニックドライブは、株式会社ハーモニック・ドライブ・システムズの登録商標または商標です。
●EtherNet/IP™はODVAの商標です。
●Modbus(RTU)は、Schneider Automation Inc. の登録商標です。
●このカタログに記載している会社名および商品の名称は、それぞれの会社が所有する商標または登録商標です。
お問い合わせ先
この資料に関する内容は、最寄りの営業所またはこちらまで。携帯電話からもご利用可能です。
受付時間: 平日/9:00~17:30 TEL:0120-914-271
オリエンタルモーター株式会社
作成:2023 年 11 月 20 日