


5種類のロボット内製事例をご紹介しています。
こちらの概要資料は、その内の1種です。
1) ワーク投入_整列(垂直多関節ロボット)
2) ワーク組立_圧入(直交ロボット)
3) ワーク外観検査(水平多関節ロボット)
4) ワーク分解工程(パラレルリンクロボット)
5) ワーク搬送(AGV・AMR)
本紙では、デモ機の使用製品、動作などを掲載しています。
当社製品で構成したときの具体的なスペックや装置イメージができるため、内製を検討されている方におすすめです。
このカタログについて
| ドキュメント名 | ワーク外観検査(水平多関節ロボット)の概要資料 |
|---|---|
| ドキュメント種別 | 事例紹介 |
| ファイルサイズ | 2.2Mb |
| 登録カテゴリ | |
| 取り扱い企業 | オリエンタルモーター株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ



このカタログの内容
Page1
モーションシステム複合デモ機
モジュール 3 (ワーク外観検査)
概要資料
Page2
目次
1.モーションシステム複合デモ機 モジュール 3(ワーク外観検査)について....................................3
2.モーションシステム複合デモ機 モジュール 3 のロボット仕様 ........................................................3
3.デモ機の主な寸法(参考) .................................................................................................................5
3-1.ロボットの主な寸法 .................................................................................................................5
3-2.デモ機の主な寸法 .....................................................................................................................6
4.使用製品 .............................................................................................................................................. 7
4-1.機構部 ....................................................................................................................................... 7
4-2.制御部 ....................................................................................................................................... 8
5.システム構成 ....................................................................................................................................... 9
6.デモ機の動作(参考) ......................................................................................................................1 0
7.MRC Studio の設定 ............................................................................................................................. 11
8.水平多関節ロボットの作業待機位置 .................................................................................................1 2
注意事項
1)本資料は当社のデモ機においての内容を参考事例として記したものになります。
機器個別の操作や組み立て、設置および配線方法に関しては記載しておりません。
必要に応じて対象製品の取扱説明書を参照するか、機器メーカーまでお問い合わせください。
2)当社のデモ機は本資料を元に製作した一例です。
本資料を参考に装置を検討する際には、安全対策を含め十分評価の上、採否につきましては
お客様でご判断願います。
3)本資料の一部または全部を、オリエンタルモーター株式会社の許可なしに複写、複製、
再配布することを禁じます。
4)本資料の記載内容は、2023 年 11 月時点のものです。
記載内容は改良のため予告なく変更されることがあります。
Page3
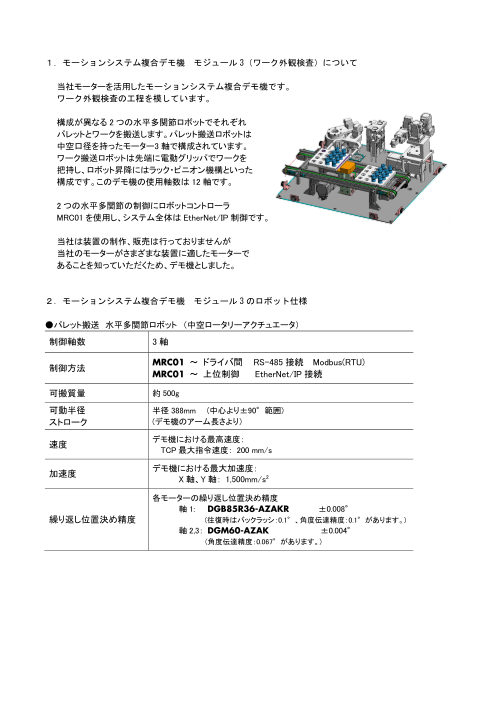
1.モーションシステム複合デモ機 モジュール 3(ワーク外観検査)について
当社モーターを活用したモーションシステム複合デモ機です。
ワーク外観検査の工程を模しています。
構成が異なる 2 つの水平多関節ロボットでそれぞれ
パレットとワークを搬送します。パレット搬送ロボットは
中空口径を持ったモーター3 軸で構成されています。
ワーク搬送ロボットは先端に電動グリッパでワークを
把持し、ロボット昇降にはラック・ピニオン機構といった
構成です。このデモ機の使用軸数は 12 軸です。
2 つの水平多関節の制御にロボットコントローラ
MRC01 を使用し、システム全体は EtherNet/IP 制御です。
当社は装置の制作、販売は行っておりませんが
当社のモーターがさまざまな装置に適したモーターで
あることを知っていただくため、デモ機としました。
2.モーションシステム複合デモ機 モジュール 3 のロボット仕様
●パレット搬送 水平多関節ロボット (中空ロータリーアクチュエータ)
制御軸数 3 軸
MRC01 ~ ドライバ間 RS-485 接続 Modbus(RTU)
制御方法
MRC01 ~ 上位制御 EtherNet/IP 接続
可搬質量 約 500g
可動半径 半径 388mm (中心より±90°範囲)
ストローク (デモ機のアーム長さより)
デモ機における最高速度:
速度
TCP 最大指令速度: 200 mm/s
デモ機における最大加速度:
加速度
X 軸、Y 軸: 1,500mm/s2
各モーターの繰り返し位置決め精度
軸 1: DGB85R36-AZAKR ±0.008°
繰り返し位置決め精度 (往復時はバックラッシ:0.1°、角度伝達精度:0.1°があります。)
軸 2,3: DGM60-AZAK ±0.004°
(角度伝達精度:0.067°があります。)
Page4
●ワーク搬送 水平多関節ロボット (AZ シリーズ+ハーモニックギヤ CSF+ラック・ピニオン機構)
制御軸数 5 軸
MRC01 ~ ドライバ間 RS-485 接続 Modbus(RTU)
制御方法
MRC01 ~ 上位制御 EtherNet/IP 接続
可搬質量 約 50g
可動半径 半径 347mm (中心より±90°範囲)
ストローク (デモ機のアーム長さより)
デモ機における最高速度:
TCP 最大指令速度: 300 mm/s (X-Y 動作時)
Z 軸 最高速度: 200mm/s
速度 グリッパ軸
最高速度: 両側: 156 mm/s、片側: 78 mm/s
押し当て速度: 両側: 20 mm/s、片側: 10 mm/s
デモ機における最大加速度:
X 軸、Y 軸: 1,500mm/s2
加速度
Z 軸: 1,000mm/s2
グリッパ軸: 両側: 20 m/s2、片側: 10 m/s2
各モーターの繰り返し位置決め精度
軸 4,5: AZM46AKH
CSF-11-50-2UP-SP-C 0.025°※
繰り返し位置決め精度 軸 6: AZM24AK
CSF-8-50-2UP-SP-A 0.034°※
軸 7: EH3-AZAKH 片側: ±0.02 mm
軸 8: LM2F200AZMK-1 ±0.07mm
※ 参考として当社ハーモニックギヤードタイプの無負荷条件での角度伝達精度を記しています。
Page5
3.デモ機の主な寸法(参考)
3-1.ロボットの主な寸法
・パレット搬送 水平多関節ロボット(軸 1~3)
180 104 104
・ワーク搬送 水平多関節ロボット(軸 4~8)
147.14 100 100
単位:mm
127
140
170
120
Page6
3-2.デモ機の主な寸法
600
単位:mm
97 107 170
600
127
147
Page7
4.使用製品
9
4-1.機構部 5
10 4
2
3
1
6
7
8
当社デモ機で使用する製品は以下になります。
No. 軸名 製品名 部品名 数量
1 軸1 DGB85R36-AZAKR 中空ロータリーアクチュエータ 1
2 軸 2~3 DGM60-AZAK 中空ロータリーアクチュエータ 2
AZM46AKH AZ モーター
3 軸 4~5 2
CSF-11-50-2UP-SP-C ※ ハーモニックギヤ 減速比 50
AZM24AK AZ モーター
4 軸 6 1
CSF-8-50-2UP-SP-A ※ ハーモニックギヤ 減速比 50
5 軸 7 EH3-AZAKH 電動グリッパ 2 つ爪 1
6 軸 8 LM2F200AZMK-1 ラック・ピニオンシステム 1
7 軸 9 AZM66AKH-TS7.2U AZ TS ギヤードモーター 減速比 7.2 1
8 軸 10 EZSM3D005AZMK 電動スライダ(電磁ブレーキ付) 1
9 軸 11 DR28T2.5BC03-AZAKL コンパクト電動シリンダ 1
10 軸 12 DR28T2.5BC03-AZAKR コンパクト電動シリンダ 1
※ ハーモニック・ドライブ・システムズ社製になります。
Page8
4-2.制御部
MRC01
ロボットコントローラ: MRC01 2 台
モータードライバ:
RS-485 通信タイプ AZD-KR2D (軸 1~8 用) 各 1 台
位置決め機能内蔵タイプ AZD-KD (軸 9~12 用) 各 1 台
モーターケーブル:
接続ケーブル(3m) CCM030Z2ABF (軸 1 用) 1 本
可動接続ケーブル(3m) CCM030Z2AAR (軸 2,3,6,7 用) 4 本
可動接続ケーブル(3m) CCM030Z1EFR (軸 4,5 用) 2 本
接続ケーブル(3m) CCM030Z2ACF (軸 8 用) 1 本
接続ケーブル(2m) CCM020Z1CVF (軸 9 用) 1 本
接続ケーブル(1.5m) CC015VZFB2 (軸 10 用) 1 本
接続ケーブル(2m) CC020VZ2F2 (軸 11,12 用) 2 本
主な上位制御機器:
CPUユニット 他 KV-8000 他 (キーエンス社製)
※ DC24V 電源、上位制御機器はお客様にてご用意ください。
Page9
5.システム構成
本デモ機でのシステム構成事例です。
上位制御機器
(キーエンス社製
KV-8000)
ロボットコントローラ
MRC01
ドライバ
■パレット搬送 水平多関節ロボット
AZD-KR2D
中空ロータリーアクチュエータ
軸 1
DGB85R36-AZAKL
中空ロータリーアクチュエータ
軸 2
DGM60-AZAK
中空ロータリーアクチュエータ
軸 3
DGM60-AZAK
■ワーク搬送 水平多関節ロボット
AZ シリーズ、ハーモニックギヤ
軸 4 AZM46AKH + ハーモニックギヤ
CSF-11-50-2UP-SP-C CSF シリーズ
AZ シリーズ、ハーモニックギヤ
軸 5 AZM46AKH + ハーモニックギヤ
CSF シリーズ
CSF-11-50-2UP-SP-C
AZ シリーズ、ハーモニックギヤ
軸 6 AZM24AK ハーモニックギヤ
+ CSF シリーズ
CSF-8-50-2UP-SP-A
電動グリッパ 2つ爪
軸 7
EH3-AZAKH
ラック・ピニオンシステム
軸 8 LM2F200AZMK-1
ドライバ
■パレット搬送、昇降 AZD-KD
AZ シリーズ、TS ギヤードモーター
軸 9
AZM66AKH-TS7.2U
電動スライダ
軸 10 EZSM3D005AZMK
■ワーク外観検査
コンパクト電動シリンダ
軸 11 DR28T2.5BC03-AZAKL
コンパクト電動シリンダ
軸 12
DR28T2.5BC03-AZAKR
Modbus RTU Modbus RTU
EtherNet/IP
Modbus RTU
Page10
6.デモ機の動作(参考)
コンベヤで流れてきたワークの外観検査工程をイメージしたデモ機です。
パレット搬送の水平多関節ロボットで取り出したあと、
ワーク搬送の水平多関節ロボットで1つずつ取り出して検査にかけます。
手前の 1 列分取り出すデモンストレーションとなっています。
① 前工程から流れてきたパレットを、コンベヤにある昇降軸で上昇させます。
パレットの下側に水平多関節ロボットの先端を潜り込ませ、パレットを中央に運びます。
パレット搬送 水平多関節ロボット
② ワーク搬送 水平多関節ロボットがワークを取りに行きます。
ワーク搬送 水平多関節ロボット
③ 外観検査部分にワークを移載。検査終了後はパレットに戻します。
外観検査部分 昇降機構
④ 検査を終えたワークを再びパレットにのせ、次工程へ搬送します。
デモ機では検査工程ですが、用途によっては加工工程等への移載として応用が可能です。
直交ロボットの導入が難しい、限られた狭いスペースの用途事例になります。
Page11
7.MRC Studio の設定
本デモ機のロボットタイプ選択や機構情報は以下のとおりです。
一連の初期設定をウィザード形式でおこなうことができます。
設定後の情報確認は、各種モニタで可能です。
■ロボット情報モニタ
・パレット搬送 水平多関節ロボット(軸 1~3)
・ワーク搬送 水平多関節ロボット(軸 4~8)
Page12
8.水平多関節ロボットの作業待機位置
待機位置は、
写真の位置になります。
赤枠
パレット搬送
水平多関節ロボット
座標:
X,Y=(-121.5, 118)
青枠
ワーク搬送
水平多関節ロボット
座標:
X,Y,Z=(220,38,200)
単位[mm]
以上
Page13
改訂履歴 内容
2023/11/20 新規作成
●ハーモニックプラネタリ、ハーモニックドライブは、株式会社ハーモニック・ドライブ・システムズの登録商標または商標です。
●EtherNet/IP™はODVAの商標です。
●Modbus(RTU)は、Schneider Automation Inc. の登録商標です。
●このカタログに記載している会社名および商品の名称は、それぞれの会社が所有する商標または登録商標です。
お問い合わせ先
この資料に関する内容は、最寄りの営業所またはこちらまで。携帯電話からもご利用可能です。
受付時間: 平日/9:00~17:30 TEL:0120-914-271
オリエンタルモーター株式会社
作成:2023 年 11 月 20 日