



初めてでも、スカラロボットの内製手順がわかる1冊
<掲載内容>
・ロボット内製化のメリット
・内製ロボット導入事例
・自動化の検討からロボット組み立てまで
・ロボットコントローラMRC01の特徴
<こんな方におすすめ>
・ロボットを内製してみたいが、知見がない
・ロボットは購入品という認識があり、今まで内製を考えていなかった
・ロボット導入を検討したが、既製品のコストやスペースを理由に諦めた
・特にスカラロボットの内製を考えている
このカタログについて
| ドキュメント名 | 内製ロボットの導入手順 |
|---|---|
| ドキュメント種別 | ハンドブック |
| ファイルサイズ | 3.3Mb |
| 登録カテゴリ | |
| 取り扱い企業 | オリエンタルモーター株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
大解剖
内製ロボットの導入手順
・ロボット内製化のメリット
・内製ロボット導入事例
・自動化の検討からロボット組み立てまで
・ロボットコントローラMRC01の特徴
Page2
目 次 1. ロボット内製化のメリット P3〜
ロボット内製化によるメリットをご紹介します。
2. 社内量産設備への内製ロボット導入事例 P5〜
オリエンタルモーターの社内設備に導入中の内製ロボットをご紹介します。
3. 自動化の検討からロボット組み立てまで P7〜
ロボットの仕様決めやロボットアームの設計ポイントなど、内製に必要な手順をご紹介します。
● 実現したい動きの確認
● ロボットタイプの決定
● ロボットアームの設計
● モーター選定
● 部品準備
● 組み立て手順
● セットアップ
● 動作確認
4. MRC01の特徴 P16
ロボット制御をシンプルに実現するロボットコントローラMRC01をご紹介します。
2
Page3
1 ロボット内製化のメリット
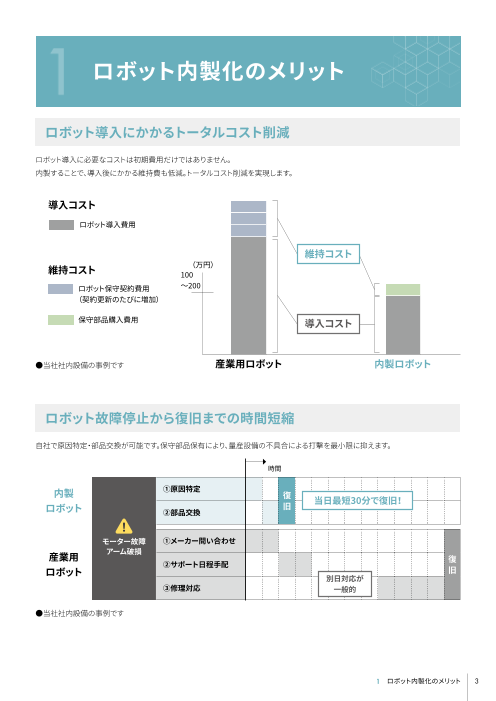
ロボット導入にかかるトータルコスト削減
ロボット導入に必要なコストは初期費用だけではありません。
内製することで、導入後にかかる維持費も低減。トータルコスト削減を実現します。
導入コスト
ロボット導入費用
維持コスト
維持コスト (万円)
���
ロボット保守契約費用 ~���
(契約更新のたびに増加)
保守部品購入費用 導入コスト
●当社社内設備の事例です 産業用ロボット 内製ロボット
ロボット故障停止から復旧までの時間短縮
自社で原因特定・部品交換が可能です。保守部品保有により、量産設備の不具合による打撃を最小限に抑えます。
時間
内製 ①原因特定
復
旧 当日最短30分で復旧!
ロボット ②部品交換
モーター故障 ①メーカー問い合わせ
産業用 アーム破損
②サポート日程手配 復
ロボット 旧
別日対応が
③修理対応 一般的
●当社社内設備の事例です
1 ロボット内製化のメリット 3
Page4
導入後のメンテナンスもお客様自身で対応可能
部品単位での保守によるコスト低減・省スペース化
内製ロボットの場合 産業用ロボットの場合
● 保守部品の準備のみ ● 保守用ロボットが必要(稼働機とは別)
● 棚保管可能 ● 保管スペースの確保
複数導入時でも、
共通部品は一括で保守可能
AZシリーズ活用によるメンテナンスフリーへ
産業用ロボットの場合、定期的なメンテナンスが推奨されています。
(バッテリ交換の目安:約1年)
こんな場面はありませんでしたか?
● 管理が属人化してしまい忘れたまま何年も経過していた
● メンテナンスの計画を立てるのが面倒
● バッテリ交換時の不手際で位置情報が消失してしまった
AZシリーズ
バッテリレス
● バッテリレスセンサ搭載によりバッテリ交換が不要 多回転
アブソリュート
● グリスアップ不要な製品を多数ラインアップ センサ搭載 ABZOセンサ
4 1 ロボット内製化のメリット
Page5
2 社内量産設備への
内製ロボット導入事例
モーター用部品の組み立て工程に水平多関節ロボットを4台導入
活人化により、一人当たりの生産能力2倍以上に向上
Before After
設備間を移動しながら
人の手でワークを脱着
ロボットで自動化
同時にライン構成の見直しも実施
自動化例
ワークを治具に脱着する作業
軸と穴の隙間:0.016mm~0.054mm
設計を標準化し、同型機を横展開
2 社内量産設備への内製ロボット導入事例 5
Page6
point1. 既存工程の設備はそのまま
ワーク脱着の作業を自動化
水平多関節ロボット4台の導入により、ローター組立工程の人員を2人から0人に省人化。
Before ローター組立工程 After ローター組立工程
加工機➀ ローラコンベヤ 加工機➁ 加工機➀ 加工機➁
point2. 設備に合わせた最適な設計
ワーク搬入口に高さ制限があり、産業用ロボットの導入が困難
Z軸を基部に配置し、設備に侵入するアーム部が薄くなるよう設計。
Z軸は基部に配置 100mm
300mm
既存設備の狭い間口
産業用ロボット 内製ロボット にも侵入可能
point3. 基本設計は最初の1台のみ
設備高さ、搬送距離に応じてアーム長さを機種ごとにカスタム可能
形状、軸数は同じため、選定計算等は数値変更のみで完了。
もう少し重いワークを搬送したい もう少し長い距離を搬送したい
モーター変更機 基本設計品 アーム長さ変更機
6 2 社内量産設備への内製ロボット導入事例
Page7
3 自動化の検討から
ロボット組み立てまで
実現したい「動き」にマッチしたロボットを内製するための手順を、
実例をもとにご紹介します。
ロボット内製
?
STEP STEP STEP STEP
1 2 3 4
設計
仕様決定
組立 セットアップ
ロボットの仕様決定 ロボットの設計 ロボットの組み立て セットアップ
● 実現したい動きの確認 ● アームの設計 ● 部品準備 ● MRC01/MRC Studio
● ロボットタイプの決定 ● アームの設計 番外編 ● 組み立て手順 ● 動作確認
● モーター選定
3 自動化の検討からロボット組み立てまで 7
Page8
STEP 1 ロボットの仕様決定
実現したい動きの確認
ロボット導入の目的
工程間のワーク搬送を自動化し、省人化。
Before ローター組立工程 After ローター組立工程
加工機➀ ローラコンベヤ 加工機➁ 加工機➀ 加工機➁
既存ライン 目指す姿
サイクルタイム 25秒/台 25秒/台
ライン内作業人数
(配膳を除く) 2 0人
人
2人の省人化
内製ロボットに求める仕様、要件
必要な動き 動きの条件
❶ ワーク把持 ● 搬送物(ワーク)の重量
❷ 搬出・搬入 最大500g
● 必要リーチ長さ
❸ 垂直移動による脱着
❷ ❸ 最大500mm
● 移動時間
❶ 人の作業時間と同等以下の時間で作業完了
8 3 自動化の検討からロボット組み立てまで
Page9
ロボットタイプの決定
必要な動きやロボット導入への制限事項などを考慮し、適したロボットタイプを選択することが重要です。
MRC01対応ロボットタイプと特徴
垂直多関節ロボット 水平多関節ロボット 直交ロボット
(スカラロボット)
Z Z Z Z Z Z
Z Z Z
X X Y X XY XY Y YX X Y
X X Y
Y Y
狭い
可動範囲 広い 直交ロボットと比較すると 狭い
Y軸方向の可動範囲は広い
設置面積 狭い 広い
位置決め精度 精度が出しにくい 精度が出しやすい
剛性 低い 高い
速度 遅い 速い 速い
対応可能なワークの大きさ 大~小 小 大~小
ロボットタイプを決定する上での検討ポイント
社内設備に水平多関節ロボットを導入した理由をまとめています。
選定要件 希望 垂直多関節 水平多関節 直交
ロボット ロボット ロボット
設置面積 限られたスペース内に導入したい 〇 〇 △
可動範囲 設備入口に高さ制限あり 〇 〇 〇
ロボットに求める動き 脱着・搬送(ひねり動作必要なし) 〇 〇 〇
オーバースペック
3 自動化の検討からロボット組み立てまで 9
Page10
STEP 2 ロボットの設計
ロボットアームの設計 所要時間:〜 5日
ロボットの構成:3軸水平多関節ロボット + 昇降軸(基部) + エンドエフェクタ
各軸の役割 軸1 軸2 軸3
軸1・軸2( 肩・肘)
アームの位置制御
軸3( 手首)
エンドエフェクタの角度制御
アーム1 アーム2 アーム3
エンドエフェクタ取付ベース
Point Point
1 アーム全長 2 各アーム長さの比率
ロボット設置点から目標地点までの距離 アーム1:アーム2:アーム3=4:3:1を
+10%を目安に 目安に
● ゆとりのある長さ設計が必要です。腕が伸びきった状 ● アーム1に対してアーム2が短すぎると、ロボット根元
態になってしまうと、ロボットが制御不能になります。 付近に死角が発生します。
● ゆとりを過剰に設けるとモーターにかかる負荷が大 ● アーム3はエンドエフェクタの角度制御に使います。
きくなり、搬送速度などが制限されます。 回転したい角度範囲でエンドエフェクタとアーム2が
干渉しない長さにする必要があります。
DGⅡシリーズの活用により
アームの設計がよりシンプルに
取付方式:面取付
カップリングなどの締結部品不要。
プレートにねじ穴加工すれば取り付け可能。
10 3 自動化の検討からロボット組み立てまで
Page11
ロボットアームの設計
アーム1 アーム2 アーム3
エンドエフェクタ取付ベース
設計 ● 軽量化のため、アームにはアルミ合金(A5052)採用
ポイント ● DGⅡシリーズの中空穴を利用して配線するため、アームにも穴加工
ロボットアームの設計 番外編
ちょこっと工夫により配線のスマートなロボットへ
軽量化 & 配線すっきり
アームの肉抜き 結束バンド固定用タップ穴追加
● 軽量化による負荷軽減 ● 膨らんでしまいがちなケーブル類をまとめて収納
● タクトタイム短縮
● ケーブル配線路に活用
3 自動化の検討からロボット組み立てまで 11
Page12
モーター選定 所要時間:〜 5日
オリエンタルモーターの選定サービスをご活用ください
選定依頼に必要な項目
● 各アームの長さ(W)、幅(D)、厚み(H)、重量
● 各モーターの軸間距離 H
● エンドエフェクタの重量
● 搬送物の重量 W
D
専任スタッフへの オリエンタルモーターのWEBサイトからも検索できます。
選定依頼はこちら 選定依頼 検索
垂直多関節ロボット 水平多関節ロボット パラレルリンクロボット
(スカラロボット)
選定依頼書は
こちら
オリエンタルモーターのWEBサイトからも検索できます。 垂直多関節ロボット :HP-011
水平多関節ロボット :HP-012
HP-011 検索
パラレルリンクロボット :HP-013
ご自身で選定を行いたいお客様へ
検討項目 確認事項
● 各部品の重量、重心位置 ● 各軸の許容トルク・許容慣性モーメントを満たしているか
● エンドエフェクタの重量 ● 負荷慣性モーメントによる変位量の大きさは許容内か
● 慣性モーメントの計算※
※負荷が最大となる状態で計算する必要があります。
水平多関節ロボットの場合は、アームが伸びきった状態です。
12 3 自動化の検討からロボット組み立てまで
Page13
STEP 3 ロボットの組み立て
部品準備 所要時間:〜 2週間程度
ロボット本体 ロボット本体 制御部
● アーム
● モーター/アクチュエータ
制御部
● ロボットコントローラ
● ドライバ
まとめて1ケースに収納
各種接続ケーブル
ロボット導入費用(定価):~¥1,052,500
当社WEBショップ価格:~¥894,610
ロボットコントローラ ドライバ
MRC01 ¥220,000 AZD-KR2D×4
¥37,400×4=¥149,600
¥220,000 ¥149,600
モーター/アクチュエータ 電源ケーブル・接続ケーブル
軸1:DGM130R-AZAK ¥192,500 電源ケーブル
軸2、3:DGM85R-AZAK ×2 RS-485通信ケーブル
¥170,500×2=¥341,000 接続ケーブル
Z軸:EACM6D20AZMK ¥79,400 可動接続ケーブル
各必要数
¥612,900 合計 ~¥70,000
アーム1枚 およそ¥15,000程度
お客様で設計・準備
アーム×3 ~¥50,000
エンドエフェクタ
3 自動化の検討からロボット組み立てまで 13
Page14
組み立て手順 所要時間:1日
組み立ての際は基部から開始し、エンドエフェクタに向けて順番に取り付けていくことを推奨します。
軸1 軸2 軸3
アーム1 アーム2 アーム3
エンドエフェクタ取付ベース
1 軸1を作業台に固定 2 3
4 5
6 エンドエフェクタ取付 7 Z軸ステージへ取付
❷~❻は位置決めピンで精度を出した後にねじ締め
コンパクト設計の水平多関節ロボット オリエンタルモーターのWEBサイトからも検索できます。
内製事例もご用意しています ▶︎ スカラロボット(水平多関節ロボット)内製事例 検索
14 3 自動化の検討からロボット組み立てまで
Page15
STEP 4 セットアップ
MRC01/MRC Studio 所要時間:30 分
● MRC01をロボットと接続し、MRC Studioを起動
● 画面指示に従って「項目を選択」o「r アーム長さなどを入力」
ガイドに沿って簡単セットアップ
イラストに従った直観的操作
動作確認
単体テスト 求める動き方
実現したい動きを一動作ごとに確認する。 ❶ ワーク把持
● ワークの把持は可能か ❷ 搬出・搬入
● 搬送位置までの移動は可能か ❸ 垂直移動による脱着
● 昇降移動は可能か ❷ ❸
結合テスト ❶
それぞれの動きを組み合わせ、一連の動作が問題ない
か確認する。
システムテスト
PLCと接続し、設備として問題なく稼働するか確認する。
3 自動化の検討からロボット組み立てまで 15
Page16
4 MRC01の特徴
ロボット制御に必要な演算処理と運転プログラム作成・指令を1台で解決
内製ロボットを動かすためには「ネットワーク」「ラダープログラム」「キネマティクス演算」など様々な知識が必要です。
ロボットコントローラMRC01の活用により、ロボット制御の経験がなくても内製ロボットの立ち上げが可能です。
演算処理
専用ソフトで項目を入力
指令・制御
● 座標 ● 速度 ● 軌跡
・(Xʻ,Y’,Z’)
・(X,Y,Z)
MRC01 内製ロボット
シンプルなプログラム 上位機器と連携可能
PLC/IPC
ロボットコントローラ
無償 体験版
USB接続 ダウン をご用意
ロード しました
プログラミングソフト
MRC Studio
I/O接続✽1
START STOP ALC
M0 M1
スイッチボックス
信✽2
RS-485通
AZシリーズ/AZシリーズ搭載アクチュエータを使用した自作ロボットを制御
MRC01
Z Z Z Z Z
既存の設備 既存の設備
Point1
Point1 Point2 Point3
X Y X Y X Y X Y X Y
Point2 Point4
P to P制御 直線補間 円弧補間(ヘリカル補間) アーチモーション パレタイジング
● 豊富なコマンドから必要な動作を選択 ● ロボットへの運転指令は、EtherNet/IPで直接送信可能
● ラダープログラムの知識不要 ● PLCを利用しないダイレクトI/O運転可能
● 信号入力待機や信号出力もMRC01で設定可能
複数のロボットタイプに対応 多様な動きを同期制御
Z Z Z Z Z Z
Z Z Z
X X X Y Y Y X X X Y
X X Y Y XY Y Y
● お客様の課題に適したロボットタイプを選択可能 ● AZシリーズ搭載製品を接続・制御可能
● 直動、回転、エンドエフェクタを1台でコントロール
オリエンタルモーターのWEBサイトからも検索できます。
専用ソフト MRC Studio(無料)の詳細はこちら ▶︎
mrcstudio 検索
●EtherNet/IP™はODVAの商標です。
● 、 、 、 、ABZOセンサは、 日本その他の国におけるオリエンタルモーター株式会社の登録商標または
商標です。
お客様ご相談センター
製品に関する技術的なお問い合わせ、購入についてのご相談はこちらまで。
平日 / 9:00~ 19:00 https://www.orientalmotor.co.jp/ja
受付時間 (土日祝日・その他当社規定による休日を除く) TEL 0120-925-410 FAX 0120-925-601
16
© 2023 Copyright ORIENTAL MOTOR CO.,LTD. E-mail webts@orientalmotor.co.jp 23 YK 13400 Z G-224