



バッテリレスのアブソリュートセンサを搭載したサーボモーター
バッテリレスアブソリュートセンサを搭載したサーボモーターです。
高速域で高トルクを発揮するため、移動量が多い位置決め用途に適しています。
基本的な操作方法はAZシリーズと同じため、装置内での併用が容易です。
このカタログについて
| ドキュメント名 | サーボモーター AZXシリーズ バッテリレスアブソリュートセンサ搭載 標準タイプ/PSギヤードタイプ 400W、600W |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 3.7Mb |
| 登録カテゴリ | |
| 取り扱い企業 | オリエンタルモーター株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
サーボモーター
AZXシリーズ
バッテリレス アブソリュートセンサ搭載
標準タイプ / PSギヤードタイプ 400W、600W
バッテリレスアブソリュートセンサを搭載したサーボモーターです。
高速域で高トルクを発揮するため、移動量が多い位置決め用途に適しています。
基本的な操作方法はAZシリーズと同じため、装置内での併用が容易です。
バッテリレスのアブソリュートセンサを搭載したサーボモーター
AZXシリーズは、AZシリーズと同じバッテリレスの機械式アブソリュートセンサ(ABZOセンサ)を搭載しています。
位置決め運転や連続運転に特化したサーボモーターです。
● 外部センサ不要
アブソリュートシステムなので、原点センサ、リミットセンサは不要です。
メリット
# 高速原点復帰+原点復帰精度の向上
バッテリレス
アブソリュートセンサ # コストダウン
(ABZOセンサ) # 省配線
# 外部センサ誤動作の影響を受けない
● バッテリレス
# 機械式センサ 機械式センサはバッテリが不要です。
非通電時も位置情報を保持 位置情報はABZOセンサで機械的に管理されています。
# 多回転アブソリュートセンサ メリット
基準となる原点から、モーター軸で±900回転 # バッテリの交換が不要
(1800回転分)の絶対位置が検出可能 # バッテリの設置スペースが不要(自由なドライバの設置)
# 海外輸送も安心
● メリットの詳細については、当社WEBサイトまたはAZシリーズ個別カタログ(V-184)をご確認ください。
ネットワーク対応ドライバ シーケンス機能によりメインプログラムを簡略化✽
ドライバはEtherCAT、EtherNet/IP、PROFINETに対応しています。 AZXシリーズの位置決め運転には、連結運転や運転間のタイマ設
上位制御機器とドライバを通信ケーブル1本で接続できるため、省 定、条件分岐、ループ回数などの豊富なシーケンス機能を搭載し
配線を実現します。 ています。サポートソフトMEXE02を使って設定することができ、
上位システムのシーケンスプログラムを簡略化できます。
✽ EtherCAT対応ドライバは対象外です。
START # 位置決め運転データ
上位制御機器 設定値(最大256点)
ストアード # 汎用入出力点数
ネットワークから ・運転の実行 データ運転
モーター制御 ・各種パラメータの設定 (入力6点、出力6点)
・アラーム情報の確認 出力
位置決め運転① 外部機器 # 通信用入出力点数
・上位制御機器との配線を
サーボモーター 省配線 通信ケーブル 1本に集約 待ち時間設定 (入力16点、出力16点)
AZXシリーズ ・配線ミスや工数を削減
ネットワーク対応ドライバ 入力
条件の設定 外部センサ
繰り返し
回数設定
位置決め運転②
END
Page2
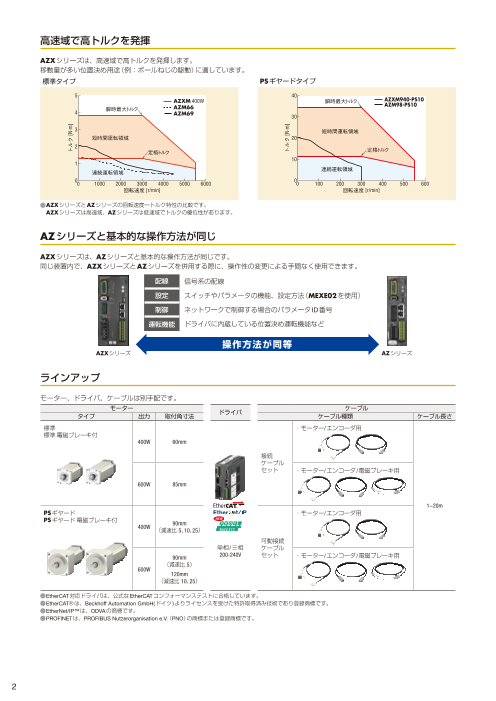
高速域で高トルクを発揮
AZXシリーズは、高速域で高トルクを発揮します。
移動量が多い位置決め用途(例:ボールねじの駆動)に適しています。
標準タイプ PSギヤードタイプ
5 40
AZXM 400W 瞬時最大トルク AZXM940-PS10
AZM98-PS10
瞬時最大トルク AZM66
4 AZM69 30
3 短時間運転領域
短時間運転領域 20
2
定格トルク 定格トルク
10
1
連続運転領域 連続運転領域
00 1000 2000 3000 4000 5000 6000 00 100 200 300 400 500 600
回転速度 [r/min] 回転速度 [r/min]
● AZXシリーズとAZシリーズの回転速度―トルク特性の比較です。
AZXシリーズは高速域、AZシリーズは低速域でトルクの優位性があります。
AZシリーズと基本的な操作方法が同じ
AZXシリーズは、AZシリーズと基本的な操作方法が同じです。
同じ装置内で、AZXシリーズとAZシリーズを併用する際に、操作性の変更による手間なく使用できます。
配線 信号系の配線
設定 スイッチやパラメータの機能、設定方法(MEXE02を使用)
制御 ネットワークで制御する場合のパラメータ ID番号
運転機能 ドライバに内蔵している位置決め運転機能など
操作方法が同等
AZXシリーズ AZシリーズ
ラインアップ
モーター、ドライバ、ケーブルは別手配です。
モーター ケーブル
ドライバ
タイプ 出力 取付角寸法 ケーブル種類 ケーブル長さ
標準 ・モーター/エンコーダ用
標準 電磁ブレーキ付
400W 60mm
接続
ケーブル
セット ・モーター/エンコーダ /電磁ブレーキ用
600W 85mm
1~20m
PSギヤード ・モーター/エンコーダ用
PSギヤード 電磁ブレーキ付 90mm
400W (減速比 5、10 、25)
可動接続
単相 /三相 ケーブル
90mm 200-240V セット ・モーター/エンコーダ /電磁ブレーキ用
(減速比 5)
600W
120mm
(減速比 10、25)
● EtherCAT対応ドライバは、公式なEtherCATコンフォーマンステストに合格しています。
● EtherCAT®は、Beckhoff Automation GmbH(ドイツ )よりライセンスを受けた特許取得済み技術であり登録商標です。
● EtherNet/IP™は、ODVAの商標です。
● PROFINETは、PROFIBUS Nutzerorganisation e.V.(PNO)の商標または登録商標です。
2
トルク [N∙m]
トルク [N∙m]
Page3
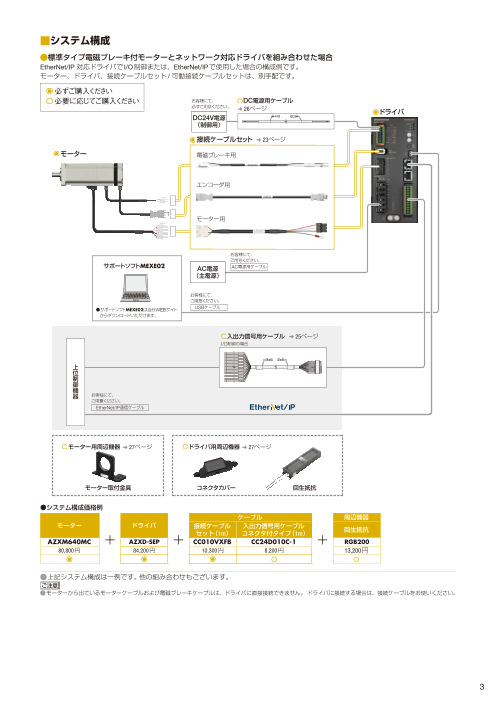
"システム構成
● 標準タイプ電磁ブレーキ付モーターとネットワーク対応ドライバを組み合わせた場合
EtherNet/IP 対応ドライバで I/O制御または、EtherNet/IPで使用した場合の構成例です。
モーター、ドライバ、接続ケーブルセット / 可動接続ケーブルセットは、別手配です。
必ずご購入ください
必要に応じてご購入ください お客様にて、 DC電源用ケーブル
必ずご用意ください。
➜ 26ページ ドライバ
DC24V電源
(制御用)
接続ケーブルセット ➜ 23ページ
モーター 電磁ブレーキ用
エンコーダ用
モーター用
お客様にて、
ご用意ください。
サポートソフトMEXE02 AC電源 AC電源用ケーブル
(主電源)
お客様にて、
ご用意ください。
●サポートソフトMEXE02は当社WEBサイト USBケーブル
からダウンロードいただけます。
入出力信号用ケーブル ➜ 25ページ
I/O制御の場合
上
位
制
御
機
器 お客様にて、
ご用意ください。
EtherNet/IP通信ケーブル
モーター用周辺機器 ➜ 27ページ ドライバ用周辺機器 ➜ 27ページ
モーター取付金具 コネクタカバー 回生抵抗
●システム構成価格例
ケーブル 周辺機器
モーター ドライバ 接続ケーブル 入出力信号用ケーブル
セット(1m) コネクタ付タイプ(1m) 回生抵抗
AZXM640MC AZXD-SEP CC010VXFB CC24D010C-1 RGB200
80,800円 84,200円 10,300円 8,200円 13,200円
● 上記システム構成は一例です。 他の組み合わせもございます。
ご注意
● モーターから出ているモーターケーブルおよび電磁ブレーキケーブルは、ドライバに直接接続できません。ドライバに接続する場合は、接続ケーブルをお使いください。
3
Page4
"品名の見方
● モーター
◇ 標準タイプ
AZXM 6 40 A C ① モーター種類 AZXM:AZXシリーズモーター
② モーター取付角寸法 6:60mm
9:85mm
① ② ③ ④ ⑤
③ 出力 40:400W
60:600W
④ 出力軸形状 A:片軸 M:電磁ブレーキ付
⑤ モーター仕様 C:AC電源入力仕様
◇ PSギヤードタイプ
AZXM 9 40 A C-PS 10 ① モーター種類 AZXM:AZXシリーズモーター
② モーター取付角寸法 9:90mm
12:120mm
① ② ③ ④ ⑤ ⑥ ⑦
③ 出力 40:400W
60:600W
④ 出力軸形状 A:片軸 M:電磁ブレーキ付
⑤ モーター仕様 C:AC電源入力仕様
⑥ ギヤ種類 PS:PSギヤードタイプ
⑦ 減速比
● ドライバ
AZXD-S EP ① ドライバ種類 AZXD:AZXシリーズドライバ
② 電源入力 S:単相 /三相 200−240V
種類 ED:EtherCAT対応
① ② ③ ③ EP:EtherNet/IP対応
PN:PROFINET対応
● 接続ケーブルセット /可動接続ケーブルセット
CC 010 V X F B ① CC:ケーブル
長さ 010:1m 020:2m 030:3m
② 050:5m 070:7m 100:10m
① ② ③ ④ ⑤ ⑥ 150:15m 200:20m
③ 追番
④ 適用機種 X:AZXシリーズ用
⑤ ケーブル種類 F:接続ケーブルセット
R:可動接続ケーブルセット
⑥ 内容 なし:電磁ブレーキなし用
B:電磁ブレーキ付用
4
Page5
"種類と価格
モーター、ドライバ、接続ケーブルは別手配です。
● モーター
◇ 標準タイプ ◇ 標準タイプ電磁ブレーキ付
取付角寸法 出力 品名 定価 取付角寸法 出力 品名 定価
60mm 400W AZXM640AC 58,400円 60mm 400W AZXM640MC 80,800円
85mm 600W AZXM960AC 81,100円 85mm 600W AZXM960MC 103,600円
◇ PSギヤードタイプ ◇ PSギヤードタイプ電磁ブレーキ付
取付角寸法 出力 品名 定価 取付角寸法 出力 品名 定価
AZXM940AC-PS5 107,900円 AZXM940MC-PS5 130,300円
400W AZXM940AC-PS10 107,900円 400W AZXM940MC-PS10 130,300円
90mm AZXM940AC-PS25 121,100円 90mm AZXM940MC-PS25 143,500円
600W AZXM960AC-PS5 130,600円 600W AZXM960MC-PS5 153,100円
AZXM1260AC-PS10 169,100円 AZXM1260MC-PS10 191,600円
120mm 600W AZXM1260AC-PS25 189,100円 120mm 600W AZXM1260MC-PS25 211,600円
● ドライバ
◇ EtherCAT対応 ◇ EtherNet/IP対応
電源入力 品名 定価 電源入力 品名 定価
単相 /三相200-240V AZXD-SED 84,200円 単相 /三相200-240V AZXD-SEP 84,200円
◇ PROFINET対応
電源入力 品名 定価
単相 /三相200-240V AZXD-SPN 84,200円
● 接続ケーブルセット/可動接続ケーブルセット
ケーブルが屈曲される場合には、可動接続ケーブルセットをお使いください。
接続ケーブルに継ぎ足しできる中継ケーブルセット、可動中継ケーブルセットもご用意しています。
22ページをご覧ください。
5
Page6
"付属品
● モーター ● ドライバ
付属品 付属品 コネクタ
タイプ 平行キー タイプ
標準タイプ − ・CN1用(1個)
EtherCAT対応
PSギヤードタイプ 1個 N4用(1個)
EtherNet/IP対応 ・C
個)
PROFINET対応 ・CN7用(1
・コネクタ結線レバー(1個)
"組み合わせ一覧
種類 タイプ 品名
標準タイプ AZXM640 ■ C、AZXM960 ■ C
モーター ■
PSギヤードタイプ AZXM940 C-PS □、AZXM960 ■ C-PS5
AZXM1260 ■ C-PS □
種類 タイプ 品名
EtherCAT対応 AZXD-SED
ドライバ EtherNet/IP対応 AZXD-SEP
PROFINET対応 AZXD-SPN
種類 タイプ 品名
◇◇◇
接続ケーブルセット モーター/エンコーダ用:CC VXF
接続ケーブルセット/ モーター/エンコーダ /電磁ブレーキ用:CC◇◇◇VXFB
可動接続ケーブルセット
可動接続ケーブルセット モーター/エンコーダ用:CC◇◇◇VXR
モーター/エンコーダ /電磁ブレーキ用:CC◇◇◇VXRB
● 品名中の記号には、以下の種類を表す文字や数字が入ります。
■: 出力軸形状
□:減速比
◇:ケーブル長さ
6
Page7
仕様表の見方
片軸シャフト AZXM640AC AZXM940AC-PS5
モーター品名 ⑥ 速度範囲
電磁ブレーキ付 AZXM640MC AZXM940MC-PS5
ドライバ品名 AZXD-S □ ギヤ出力軸で運転できる速度の範囲です。
① 定格出力 W 400 400
② 定格回転速度 r/min 3000 - ⑦ ローター慣性モーメント
③ 最高回転速度 r/min 5500 -
④ 定格トルク N·m 1.27 5.72 モーター内部の回転子(ローター)の慣性モーメントです。
⑤ 瞬時最大トルク N·m 3.82 17.1
⑥ 速度範囲 r/min - 0∼1100 モーターに必要なトルク(加速トルク)を求める際に必要となりま
⑦ ローター慣性モーメント J:kg·m2 0.294×10-4 0.294×10-4
[0.316×10-4] [0.316×10-4] す。
⑧ 慣性モーメント J:kg·m2 - 0.163×10-4 ⑧ 慣性モーメント
⑨ 許容慣性モーメント J:kg·m2 14.7×10-4 0.037
⑩ 減速比 - 5 ギヤヘッド内部の慣性モーメントです。
⑪ 分解能 100∼10000 500∼50000
P/R (出荷時設定 1000) (出荷時設定 5000) モーターに必要なトルク(加速トルク)を求める際に必要となりま
検出器 機械式多回転アブソリュートエンコーダ
1回転:16bit 多回転:±900回転(1800回転分) す。
⑫ バックラッシ arcmin - 15
入力電圧 単相 /三相200-240V -15∼+6% 50/60Hz ⑨ 許容慣性モーメント
主電源
⑬ 定格電流 A 単相:5.3 三相:3.0
電源入力
入力電圧 DC24V±5% モーターが安定して制御できる負荷慣性モーメントです。
制御電源
入力電流 A 0.2[7 0.57]
型式 無励磁作動型 この値を超えて負荷をかけると、制御が不安定となり、速度変動
電源入力 DC24V±10% 率のばらつき、保護回路の動作、振動などの問題が発生すること
電磁ブレーキ部 消費電力 W 7.2
定格電流 A 0.3 があります。
⑭ 静摩擦トルク N·m 1.27
① 定格出力 ⑩ 減速比
モーターの定格回転速度、定格トルクで連続運転したときに、温 モーターからの入力回転速度とギヤ出力軸の回転速度の比をい
度上昇が許容値を超えない範囲です。 います。 例えば減速比 10は、モーターからの入力回転速度が
10r/minのとき、ギヤ出力軸は1r/minで回転するということです。
② 定格回転速度
モーターが定格出力で運転するときの回転速度をいいます。 ⑪ 分解能
1パルスで出力軸の回転をきざむ角度を示します。例えば分解能
③ 最高回転速度
=1000p/revであれば、モーター1回転(360˚)を1000分割できると
モーターが回転できる最大の回転速度をいいます。
いうことです。
④ 定格トルク
⑫ バックラッシ
モーターの定格出力、定格回転速度で運転するときに出力するト
ルクをいいます。 モーター軸を固定したときのギヤ出力軸の遊びのことです。
両方向から位置決めするときは位置決め精度に影響します。
⑤ 瞬時最大トルク
⑬ 定格電流
瞬時(短時間)に使用できる最大トルクです。
加速・減速時には最大で、このトルクまで使えます。 連続運転領域で使用するときに必要な主電源の入力電流値です。
⑭ 静摩擦トルク
電磁ブレーキの仕様です。電磁ブレーキが位置保持できる最大の
保持トルク(保持力)のことです。
回転速度―トルク特性の見方
AZXM640 □ C AZXM940 □ C-PS5
5 20
④瞬時最大トルク
④瞬時最大トルク
4
15
3 ②短時間運転領域
②短時間運転領域 10
2
③定格トルク ③定格トルク
5
1
①連続運転領域 ①連続運転領域
00 1000 2000 3000 4000 5000 6000 00 200 400 600 800 1000 1200
回転速度 [r/min] 回転速度 [r/min]
①連続運転領域 ④瞬時最大トルク
瞬時(短時間)に使用できる最大トルクです。
連続定格で使用できる領域です。実効負荷トルクは必ずこの領域 加速・減速時には最大で、このトルクまで使えます。
におさまるようにします。
②短時間運転領域
加速・減速時に使用する領域です。
③定格トルク
モーターの定格出力、定格回転速度で運転するときに出力するト
ルクをいいます。
7
トルク [N∙m]
トルク [N∙m]
Page8
標準タイプ
取付角寸法 60mm
"仕様
片軸シャフト AZXM640AC
モーター品名
電磁ブレーキ付 AZXM640MC
ドライバ品名 AZXD-S ■
定格出力 W 400
定格回転速度 r/min 3000
最高回転速度 r/min 5500
定格トルク N·m 1.27
瞬時最大トルク N·m 3.82
ローター慣性モーメント J:kg·m2 0.294×10-4
[0.316×10-4]✽1
許容慣性モーメント✽2 J:kg·m2 14.7×10-4
分解能 P/R 100∼1000(0 出荷時設定 1000)
検出器 機械式多回転アブソリュートエンコーダ
1回転:16bit 多回転:±900回転(1800回転分)
入力電圧 単相 /三相200-240V −15∼+6% 50/60Hz
主電源
定格電流✽3 A 単相:5.3 三相:3.0
電源入力
入力電圧 DC24V±5%
制御電源
入力電流 A 0.2[7 0.57]✽1
型式 無励磁作動型
電源入力 DC24V±10%
電磁ブレーキ部✽4 消費電力 W 7.2
定格電流 A 0.3
静摩擦トルク N·m 1.27
● 品名中の ■ には、ドライバの種類を表す文字が入ります。ドライバの品名は6ページ「 ■ 組み合わせ一覧」でご確認ください。
✽ 1[ ]内は電磁ブレーキ付モーターを接続したときの値です。
✽ 2 ローター慣性モーメント比50倍の値です。
✽ 3 連続運転領域で運転する場合の値です。短時間運転領域で運転するときは、最大で約3倍の電流が流れます。
✽ 4 電磁ブレーキは電源OFF時の位置保持用です。制動用途には使えません。
ご注意
● モーターを定格で連続運転する場合は、以下のサイズのアルミ板相当以上の放熱板が必要です。
AZXM640 □C:300mm×300mm 厚さ10 mm
"回転速度―トルク特性
AZXM640 □C
電源仕様:三相 /単相200-240V
5
瞬時最大トルク
4
3
短時間運転領域
2
定格トルク
1
連続運転領域
00 1000 2000 3000 4000 5000 6000
回転速度 [r/min]
ご注意
● 運転条件によっては回生抵抗が必要となる場合があります。 回生抵抗 ➜ 27ページ
● 品名中の □ には、形状を表すA(標準)またはM(電磁ブレーキ付)が入ります。
8
トルク [N∙m]
Page9
標準タイプ
取付角寸法 85mm
"仕様
片軸シャフト AZXM960AC
モーター品名
電磁ブレーキ付 AZXM960MC
ドライバ品名 AZXD-S ■
定格出力 W 600
定格回転速度 r/min 3000
最高回転速度 r/min 5500
定格トルク N·m 1.91
単相 200-240V N·m 3.82
瞬時最大トルク
三相 200-240V N·m 7.16
ローター慣性モーメント J:kg·m2 0.948×10-4
[1.03×10-4]✽1
許容慣性モーメント✽2 J:kg·m2 47.4×10-4
分解能 P/R 100∼1000(0 出荷時設定 1000)
検出器 機械式多回転アブソリュートエンコーダ
1回転:16bit 多回転:±900回転(1800回転分)
入力電圧 単相 /三相200-240V −15∼+6% 50/60Hz
主電源
定格電流✽3 A 単相:7.1 三相:3.9
電源入力
入力電圧 DC24V±5%
制御電源
入力電流 A 0.2[7 0.62]✽1
型式 無励磁作動型
電源入力 DC24V±10%
電磁ブレーキ部✽4 消費電力 W 8.5
定格電流 A 0.35
静摩擦トルク N·m 1.91
● 品名中の ■ には、ドライバの種類を表す文字が入ります。ドライバの品名は6ページ「 ■ 組み合わせ一覧」でご確認ください。
✽ 1[ ]内は電磁ブレーキ付モーターを接続したときの値です。
✽ 2 ローター慣性モーメント比50倍の値です。
✽ 3 連続運転領域で運転する場合の値です。短時間運転領域で運転するときは、三相入力の場合は最大で約4倍、単相入力の場合は最大で約2倍の電流が流れます。
✽ 4 電磁ブレーキは電源OFF時の位置保持用です。制動用途には使えません。
ご注意
● モーターを定格で連続運転する場合は、以下のサイズのアルミ板相当以上の放熱板が必要です。
AZXM960 □C:350mm×350mm 厚さ10 mm
"回転速度―トルク特性
AZXM960 □ C AZXM960 □ C
電源仕様:三相200-240V 電源仕様:単相200-240V
8 5
瞬時最大トルク
4 瞬時最大トルク
6
短時間運転領域 3 短時間運転領域
4
定格トルク
2
定格トルク
2
1 連続運転領域
連続運転領域
00 1000 2000 3000 4000 5000 6000 00 1000 2000 3000 4000 5000 6000
回転速度 [r/min] 回転速度 [r/min]
ご注意
● 運転条件によっては回生抵抗が必要となる場合があります。 回生抵抗 ➜ 27ページ
● 品名中の □ には、形状を表すA(標準)またはM(電磁ブレーキ付)が入ります。
9
トルク [N∙m]
トルク [N∙m]
Page10
PSギヤードタイプ
取付角寸法 90mm
"仕様
片軸シャフト AZXM940AC-PS5 AZXM940AC-PS10 AZXM940AC-PS25 AZXM960AC-PS5
モーター品名
電磁ブレーキ付 AZXM940MC-PS5 AZXM940MC-PS10 AZXM940MC-PS25 AZXM960MC-PS5
ドライバ品名 AZXD-S ■
定格出力 W 400 600
定格トルク N·m 5.72 11.4 25.7 8.6
単相 200-240V N·m 17.2
瞬時最大トルク 17.1 34.3 77.2
三相 200-240V N·m 32.2
速度範囲 r/min 0∼1100 0∼550 0∼220 0∼1100
ローター慣性モーメント J:kg·m2 0.294×10-[4 0.316×10-4]✽1 0.948×10-[4 1.03×10-4]✽1
慣性モーメント✽2 J:kg·m2 0.163×10-4 0.160×10-4 0.175×10-4 0.163×10-4
許容慣性モーメント✽3 J:kg·m2 0.037 0.147 0.919 0.119
減速比 5 10 25 5
分解能 500∼50000 1000∼100000 2500∼250000 500∼50000
P/R (出荷時設定 5000) (出荷時設定 10000) (出荷時設定 25000) (出荷時設定 5000)
検出器 機械式多回転アブソリュートエンコーダ
1回転:16bit 多回転:±900回転(1800回転分)
バックラッシ arcmin 1(5 0.25˚)
入力電圧 単相 /三相200-240V −15∼+6% 50/60Hz
主電源
定格電流✽4 A 単相:5.3 三相:3.0 単相:7.1 三相:3.9
電源入力
入力電圧 DC24V±5%
制御電源
入力電流 A 0.2[7 0.57]✽1 0.2[7 0.62]✽1
型式 無励磁作動型
電源入力 DC24V±10%
電磁ブレーキ部✽5 消費電力 W 7.2 8.5
定格電流 A 0.3 0.35
静摩擦トルク N·m 1.27 1.91
● 品名中の ■ には、ドライバの種類を表す文字が入ります。ドライバの品名は6ページ「 ■ 組み合わせ一覧」でご確認ください。
✽ 1[ ]内は電磁ブレーキ付モーターを接続したときの値です。
✽ 2 ギヤ部の内部の慣性モーメントをモーター軸に換算した値です。
✽ 3 ローター慣性モーメント比50倍×減速比の2乗した値です。
✽ 4 連続運転領域(連続定格で使用できる領域)で運転する場合の値です。
短時間運転領域(加速、減速に使用する領域)で運転するときは、次の電流が流れます。
· AZXM940:最大で約3倍
· AZXM960の単相:最大で約2倍
· AZXM960の三相:最大で約4倍
✽ 5 電磁ブレーキは電源OFF時の位置保持用です。制動には使えません。
"回転速度―トルク特性
AZXM940 □C-PS5 AZXM940 □C-PS10 AZXM940 □C-PS25
電源仕様:三相 /単相200-240V 電源仕様:三相 /単相200-240V 電源仕様:三相 /単相200-240V
20 40 100
瞬時最大トルク
瞬時最大トルク 瞬時最大トルク
80
15 30
短時間運転領域 短時間運転領域 60
10 20 短時間運転領域
定格トルク 定格トルク 40
定格トルク
5 10
20
連続運転領域 連続運転領域 連続運転領域
00 200 400 600 800 1000 1200 00 100 200 300 400 500 600 00 50 100 150 200 250
回転速度 [r/min] 回転速度 [r/min] 回転速度 [r/min]
AZXM960 □ C-PS5 AZXM960 □ C-PS5
電源仕様:三相200-240V 電源仕様:単相200-240V
40 20
35 瞬時最大トルク
瞬時最大トルク 16
30
短時間運転領域
25 12
20 短時間運転領域 定格トルク
15 8
定格トルク
10
4 連続運転領域
5 連続運転領域
00 200 400 600 800 1000 1200 00 200 400 600 800 1000 1200
回転速度 [r/min] 回転速度 [r/min]
ご注意
● 運転条件によっては回生抵抗が必要となる場合があります。 回生抵抗 ➜ 27ページ
● 品名中の □ には、形状を表すA(標準)またはM(電磁ブレーキ付)が入ります。
10
トルク [N∙m] トルク [N∙m]
トルク [N∙m] トルク [N∙m]
トルク [N∙m]
Page11
PSギヤードタイプ
取付角寸法 120mm
"仕様
片軸シャフト AZXM1260AC-PS10 AZXM1260AC-PS25
モーター品名
電磁ブレーキ付 AZXM1260MC-PS10 AZXM1260MC-PS25
ドライバ品名 AZXD-S ■
定格出力 W 600
定格トルク N·m 18.1 43.1
単相 200-240V N·m 36.3 86.2
瞬時最大トルク
三相 200-240V N·m 68 162
速度範囲 r/min 0∼550 0∼220
ローター慣性モーメント J:kg·m2 0.948×10-[4 1.03×10-4]✽1
慣性モーメント✽2 J:kg·m2 0.188×10-4 0.175×10-4
許容慣性モーメント✽3 J:kg·m2 0.474 2.963
減速比 10 25
分解能 1000∼100000 2500∼250000
P/R (出荷時設定 10000) (出荷時設定 25000)
検出器 機械式多回転アブソリュートエンコーダ
1回転:16bit 多回転:±900回転(1800回転分)
バックラッシ arcmin 1(5 0.25˚)
入力電圧 単相 /三相200-240V −15∼+6% 50/60Hz
主電源
定格電流✽4 A 単相:7.1 三相:3.9
電源入力
入力電圧 DC24V±5%
制御電源
入力電流 A 0.2[7 0.62]✽1
型式 無励磁作動型
電源入力 DC24V±10%
電磁ブレーキ部✽5 消費電力 W 8.5
定格電流 A 0.35
静摩擦トルク N·m 1.91
● 品名中の ■ には、ドライバの種類を表す文字が入ります。ドライバの品名は6ページ「 ■ 組み合わせ一覧」でご確認ください。
✽ 1[ ]内は電磁ブレーキ付モーターを接続したときの値です。
✽ 2 ギヤ部の内部の慣性モーメントをモーター軸に換算した値です。
✽ 3 ローター慣性モーメント比50倍×減速比の2乗した値です。
✽ 4 連続運転領域(連続定格で使用できる領域)で運転する場合の値です。
短時間運転領域(加速、減速に使用する領域)で運転するときは、次の電流が流れます。
· AZXM1260の単相:最大で約2倍
· AZXM1260の三相:最大で約4倍
✽ 5 電磁ブレーキは電源OFF時の位置保持用です。制動には使えません。
"回転速度―トルク特性
AZXM1260 □C-PS10 AZXM1260 □C-PS10
電源仕様:三相200-240V 電源仕様:単相200-240V
80 50
瞬時最大トルク
70 瞬時最大トルク
40
60
50
短時間運転領域 30
40 短時間運転領域 定格トルク
30 20
定格トルク
20
10
10 連続運転領域 連続運転領域
00 100 200 300 400 500 600 00 100 200 300 400 500 600
回転速度 [r/min] 回転速度 [r/min]
AZXM1260 □C-PS25 AZXM1260 □C-PS25
電源仕様:三相200-240V 電源仕様:単相200-240V
200 120
瞬時最大トルク
160 100 瞬時最大トルク
80
120 短時間運転領域
短時間運転領域 60 定格トルク
80
定格トルク 40
40 20
連続運転領域 連続運転領域
00 50 100 150 200 250 00 50 100 150 200 250
回転速度 [r/min] 回転速度 [r/min]
ご注意
● 運転条件によっては回生抵抗が必要となる場合があります。 回生抵抗 ➜ 27ページ
● 品名中の □ には、形状を表すA(標準)またはM(電磁ブレーキ付)が入ります。
11
トルク [N∙m] トルク [N∙m]
トルク [N∙m] トルク [N∙m]
Page12
"ドライバ仕様
ドライバ品名 AZXD-SED AZXD-SEP AZXD-SPN
制御入力 6点、フォトカプラ
パルス出力 2点、ラインドライバ
制御出力 6点、フォトカプラ・オープンコレクタ
インターフェイス
動力遮断信号入力 2点、フォトカプラ
動力遮断モニタ出力 1点、フォトカプラ・オープンコレクタ
フィールドネットワーク EtherCAT EtherNet/IP PROFINET
"ドライバ機能
● EtherCAT対応
ドライバ品名 AZXD-SED
入力 16点
リモート I/O
出力 16点
プロファイル位置モード(PP)
プロファイル速度モード(PV)
オペレーションモード 原点復帰モード(HM)
サイクリック同期位置モード(CSP)
サイクリック同期速度モード(CSV)
設定ツール サポートソフト MEXE02
座標管理方法 バッテリレスアブソリュートシステム
モニタ /インフォメーション 下記の表と同じです。
アラーム ◯
● EtherNet/IP対応、PROFINET対応
ドライバ品名 AZXD-SEP
AZXD-SPN
位置決めデータ数 256点
入力 16点
リモート I/O
出力 16点
設定ツール サポートソフト MEXE02
座標管理方法 バッテリレスアブソリュートシステム
単独運転 ○
連結方式 順送運転 ○
位置決め運転 多段変速(形状連結) ○
シーケンス ループ運転(繰り返し) ○
運転 制御 イベントジャンプ運転 ○
連続運転 ○
原点復帰運転 ○
原点復帰運転
高速原点復帰運転 ○
JOG運転 ○
波形モニタ ○
過負荷検出 ○
過熱検出(モーター・ドライバ) ○
モニタ /インフォメーション 位置・速度情報 ○
温度検出(モーター・ドライバ) ○
モーター負荷率 ○
走行距離・積算走行距離 ○
アラーム ○
12
Page13
"通信仕様
● EtherCAT
通信規格 IEC 61158 Type12
物理層 /プロトコル 100 BASE-TX(IEEE 802.3)
伝送速度 100 Mbps
・Free Runモード:1 ms以上
通信サイクル ・SM2イベント同期モード:1 ms以上
・DCモード:0.25 ms、0.5 ms、1 ms、2 ms、3 ms、4 ms、5 ms、6 ms、7 ms、8 ms、9ms、10ms
RJ45×(2 シールド対応)
通信ポート /コネクタ ECAT IN:EtherCAT入力
ECAT OUT:EtherCAT出力
トポロジ ディジーチェーン(最大65,535ノード)
プロセスデータ 可変PDOマッピング
・SM0:メールボックス出力
シンクマネージャー ・SM1:メールボックス入力
・SM2:プロセスデータ出力
・SM3:プロセスデータ入力
・エマージェンシーメッセージ
メールボックス(CoE) ・SDOリクエスト
・SDOレスポンス
・SDOインフォメーション
・Free Runモード(非同期)
同期モード ・SM2イベント同期モード
・DCモード(SYNC0イベント同期)
デバイスプロファイル IEC 61800-7 CiA402ドライブプロファイル
● EtherNet/IP
通信規格 EtherNet/IP(CT18準拠)
ベンダーID 187:Oriental Motor Co., Ltd
デバイスタイプ 43:Generic Device
伝送速度 10/100Mbps(オートネゴシエーション)
通信方式 全二重 /半二重(オートネゴシエーション)
ケーブル仕様 シールド付きツイストペア(STP)ケーブル
ストレート /クロス、カテゴリ5e以上推奨
出力(スキャナ➜ドライバ) 40バイト
占有バイト数
入力(ドライバ➜スキャナ) 56バイト
対応コネクション数 2
コネクションタイプ Exclusive Owner、Input Only
通信サイクル(RPI) 1∼3200ms
Implicit通信
接続タイプ(スキャナ➜ドライバ) Point−to−Point
接続タイプ(ドライバ➜スキャナ) Point−to−Point、Multicast
データ反映トリガ Cyclic
IPアドレス設定方法 IPアドレス設定スイッチ、パラメータ、DHCP
対応トポロジ スター、リニア、リング(Device Level Ring)
● PROFINET
通信規格 PROFINET IO Ver.2.43
ベンダーID 0x33E:ORIENTAL MOTOR
伝送速度 100Mbps(オートネゴシエーション)
通信方式 全二重(オートネゴシエーション)
ケーブル仕様 シールド付きツイストペア(STP)ケーブル
ストレート /クロス、カテゴリ5e以上推奨
通信コネクタ RJ45×(2 シールド対応)
Conformance Class B
RT/IRT RT
NetLoad Class Ⅰ
サポートするプロトコル DCP、LLDP、SNMP、MRP
出力(上位制御機器➜ドライバ) 40byte
占有バイト数
入力(ドライバ➜上位制御機器) 56byte
対応トポロジ スター、ツリー、ライン、リング
13
Page14
"一般仕様
モーター ドライバ
耐熱クラス 13(0 B) -
以下の通りに 以下の通りにDC500Vメガーにて測定した値が100MΩ以上
DC500Vメガーにて測定した値が100MΩ以上
絶縁抵抗 あります。 あります。
・ケース―モーター巻線間 ・保護接地端子―主電源端子間
・ケース―電磁ブレーキ巻線間✽1 ・エンコーダコネクタ―主電源端子間
・入出力信号端子―主電源端子間
以下の通りに1分間印加しても異常を認めません。
以下の通りに1分間印加しても異常を認めません。 ・保護接地端子―主電源端子間
・ケース―モーター巻線間 AC1.5kV 50Hzまたは60Hz
絶縁耐圧 AC1.5kV 50Hzまたは60Hz ・エンコーダコネクタ―主電源端子間
・ケース―電磁ブレーキ巻線間✽1 AC1.8kV 50Hzまたは60Hz
AC1.0kV 50Hzまたは60Hz ・入出力信号端子―主電源端子間
AC1.8kV 50Hzまたは60Hz
0∼+55 ˚C(凍結しないこと)✽3
周囲温度 0∼+40˚C( 凍結のないこと)✽2 [AZXM960、AZXM1260を単相200-240Vで使用する場
使用環境(動作時) 合は0∼+50 ˚C]✽3
周囲湿度 85%以下(結露のないこと)
雰囲気 腐食性ガス ·塵埃のないこと。水、油などが直接かからないこと。
保護等級 IP65( 取付面、コネクタ部を除く) IP10
シャフト振れ 0.05T.I.R(. mm)✽4 -
取付インローのシャフトに対す
る同心度 0.075T.I.R(. mm)✽4 -
取付面のシャフトに対する
直角度 0.075T.I.R(. mm)✽4 -
✽ 1 電磁ブレーキ付のみ
✽ 2 当社測定条件による
✽ 3 200×200mm、厚さ2mmのアルミ板相当以上の放熱板取り付け時
✽ 4 T.I.R.(Total Indicator Reading):基準軸心を中心にして、測定部を1回転させた場合のダイヤルゲージの読みの全量を表します。
ϕ0.075 A
0.05
A
0.075 A
ご注意
● 絶縁抵抗測定、絶縁耐圧試験を行なうときは、モーターとドライバを切り離してください。また、モーターのABZOセンサ部は、これらの試験を行なわないでください。
14
Page15
"許容ラジアル荷重・許容アキシアル荷重 単位:N
許容ラジアル荷重 許容
タイプ名 モーター
取付角寸法 品名 減速比 シャフト先端からの距離 mm アキシアル
0 5 10 15 20 荷重
60mm AZXM640 - 230 245 262 281 304 98
標準タイプ
85mm AZXM960 - 376 392 408 426 446 147
5 380 420 470 540 630
AZXM940 10 480 530 590 680 790 600
90mm
25 650 720 810 920 1070
PSギヤードタイプ
AZXM960 5 380 420 470 540 630 600
10 970 1040 1130 1230 1350
120mm AZXM1260 1200
25 1320 1420 1530 1670 1830
● 品名は、品名が識別可能な文字を記載しています。
● PSギヤードタイプは、入力回転速度が3000 r/minのときにラジアル荷重またはアキシアル荷重のどちらかが作用した場合、
寿命が10000時間を満たす値を許容値としています。
ギヤヘッドの寿命については、お近くの支店・営業所にお問い合わせいただくか、当社WEBサイトをご覧ください。
● ラジアル荷重とアキシアル荷重
シャフト先端からの距離[mm]
20
15
10
5
アキシアル荷重
ラジアル荷重
"回転方向
出力軸側から見た場合の回転方向を表します。
標準タイプのモーター出力軸側から見たギヤ出力軸の回転方向は、下表でご確認ください。
タイプ 減速比 モーター出力軸側から見た
回転方向
PSギヤードタイプ 全減速比 同方向
● 標準タイプのモーター
時計回転
CW
反時計回転
CCW
15
Page16
"外形図 (単位 mm)
● モーター
◇ 標準タイプ
取付角寸法60mm 400W
品名 質量
L 2D CAD
kg
AZXM640AC 121.5 1.5 C261
L 24±1 60
10 3 50±0.35 4×ϕ4.5穴
12 28.5
保護接地端子 M4 5 27
モーターケーブル ϕ6.5
エンコーダケーブル ϕ6
500654-0609 (Molex) 350779-1 (TE Connectivity)
取付角寸法85mm 600W
品名 質量
L 2D CAD
kg
AZXM960AC 132 3.1 C267
L 37±1 85
10 3 70±0.35 4×ϕ6.5 穴
12 28.5 5 27
エンコーダケーブル ϕ6 保護接地端子 M4
モーターケーブル ϕ8
500654-0609 (Molex) 350779-1 (TE Connectivity)
16
400
400
400
400
0
ϕ14−0.018 (h7)
0
ϕ36−0.025 (h7)
0
ϕ16−0.018 (h7)
0
ϕ60−0.030 (h7)
50±0.35
13 60
70±0.35
13 85
Page17
◇ 標準タイプ 電磁ブレーキ付
取付角寸法60mm 400W
品名 質量
L 2D CAD
kg
AZXM640MC 163.5 2.0 C262
L 24±1 60
10 3 50±0.35 4×ϕ4.5穴
12 12 28.5
保護接地端子 M4 5 27
モーターケーブル ϕ6.5
エンコーダケーブル ϕ6
電磁ブレーキケーブル ϕ6
500654-0609 (Molex) 350779-1 (TE Connectivity)
5557-02R-210 (Molex)
取付角寸法85mm 600W
品名 質量
L 2D CAD
kg
AZXM960MC 174 4.0 C268
L 37±1 85
10 3 70±0.35 4×ϕ6.5穴
12 12 28.5 5 27
保護接地端子 M4
モーターケーブル ϕ8
エンコーダケーブル ϕ6 電磁ブレーキケーブル ϕ6
500654-0609(Molex) 350779-1(TE Connectivity)
5557-02R-210(Molex)
17
400
400
400
400
400
400
0
ϕ14−0.018 (h7)
0
ϕ36−0.025 (h7)
ϕ16 0
−0.018(h7)
ϕ60 0
−0.030(h7)
50±0.35
13 60
70±0.35
13 85
Page18
◇ PSギヤードタイプ
取付角寸法90mm 400W
品名 減速比 質量
L1 L2 2D CAD
kg
5、10 61 201.5 3.5 C263
AZXM940AC-PS ■
25 88.3 229 4.4 C264
L2 47±1
60 L1 14 4×M8 深さ15 90
26
25
A
A
12 28.5 ±0.5
保護接地端子 ϕ104
M4
27 5
モーターケーブル ϕ6.5 A-A
エンコーダケーブル ϕ6
平行キー(付属品)
20.5
6 0 +0.1
500654-0609 (Molex) 350779-1 (TE Connectivity) 25±0.2 −0.03 3.5 0
取付角寸法90mm 600W
品名 減速比 質量
L1 L2 2D CAD
kg
AZXM960AC-PS ■ 5 61 226 5.3 C269
L2 47±1
85 L1 14 4×M8 深さ15 90
26
25
A
A
±0.5
12 28.5 ϕ104
保護接地端子 M4 A-A
27 5
モーターケーブル ϕ8
エンコーダケーブル ϕ 20.5
6 平行キー(付属品)
500654-0609 (Molex) 350779-1 (TE Connectivity) 6 0 +0.1
25±0.2 −0.03 3.5 0
● 品名中の ■ には、減速比を表す数字が入ります。
18
13 85 13 60
400 400
400 400
0
ϕ18−0.018 (h7)
0 ϕ61
0
−0.030 (h7)
ϕ
0 18−0.018 (h7)
6 0
−0.03 0ϕ61−0.030 (h7) 6−0.03
0
6 0
−0.03 6−0.03
90
90
Page19
取付角寸法120mm 600W
品名 減速比 質量
L1 L2 2D CAD
kg
10 84.6 249.5 7.4 C271
AZXM1260AC-PS ■
25 111.9 277 8.2 C274
L2 68±1
90 L1 18
85 66.4 6 42 120
ϕ1
30 3 40±0.5
A
A
12 28.5
27 5
保護接地端子 M4 M6 深さ12 4×ϕ9穴
A-A
モーターケーブル ϕ8
28
エンコーダケーブル ϕ6
平行キー(付属品)
M3
0
500654-0609 (Molex) 350779-1 (TE Connectivity) 15 7−0.090 4+0.2
0
30 0
−0.21
● 品名中の ■ には、減速比を表す数字が入ります。
19
13 85
90
400
400
ϕ25 0
−0.021(h7)
ϕ75 0
−0.030(h7)
8 0
−0.036
8 0
−0.036
120
Page20
◇ PSギヤードタイプ 電磁ブレーキ付
取付角寸法90mm 400W
品名 減速比 質量
L1 L2 2D CAD
kg
5、10 61 243.5 4.0 C265
AZXM940MC-PS ■
25 88.3 270.5 4.9 C266
L2 47±1
60 L1 14 4×M8 深さ15 90
26
25
A
A
12 28.5 0.5
12 0
保護接地端子 ϕ1 4±
M4 A-A
27 5
モーターケーブル ϕ6.5
エンコーダケーブル ϕ6 20.5
電磁ブレーキケーブル ϕ6 平行キー(付属品)
500654-0609 (Molex) 350779-1 (TE Connectivity)
25 6 0 +0.1
5557-02R-210 (Molex) ±0.2 −0.03 3.5 0
取付角寸法90mm 600W
品名 減速比 質量
L1 L2 2D CAD
kg
AZXM960MC-PS ■ 5 61 268 6.2 C270
L2 47±1
85 L1 14 4×M8 深さ15 90
26
25
A
A
±0.5
12 12 28.5 ϕ104
A-A
保護接地端子 M4
27 5
モーターケーブル ϕ8 20.5 平行キー(付属品)
エンコーダケーブル ϕ6
電磁ブレーキケーブル ϕ6
6 0 +0.1
25±0.2 −0.03 3.5 0
500654-0609 (Molex) 350779-1 (TE Connectivity)
5557-02R-210 (Molex)
● 品名中の ■ には、減速比を表す数字が入ります。
20
13 85 13 60
400
400
400
400
400
400
0
ϕ18−0.018 (h7)
0 ϕ
ϕ18 61 0
−0.030 (h7)
−0.018 (h7) 0
0 0 6−0.03
6−0.03 ϕ61−0.030 (h7)
0
0 6−0.03
6−0.03
90
90