



2相、5相モーター混載で1台のドライバに接続・駆動可能。装置内ドライバ占有スペースの大幅削減を実現。
EtherCAT通信に対応した、4軸タイプのオープンループステッピングモーター用ドライバです。
1台のドライバで2相モーターも5相モーター同時接続、駆動できドライバスペースの削減に役立ちます。
ドライバ自身に電磁ブレーキ自動制御機能、エンコーダ入力の機能も搭載しており、脱調検出や位置、速度のモニタが可能。
これにより上位機器のコスト、プログラム作成時間の削減が可能です。
半導体業界での採用・提案事例公開中
「制御盤スペースを圧縮するステッピングモータードライバの省配線・省スペース化事例」
https://www.orientalmotor.co.jp/ja/solutions/semi-edevices/02
関連メディア
このカタログについて
| ドキュメント名 | 2相/5相ステッピングモーター用ドライバ CVDシリーズ 多軸タイプ EtherCAT対応[V-222] |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 1.8Mb |
| 登録カテゴリ | |
| 取り扱い企業 | オリエンタルモーター株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
2相 /5相ステッピングモーター用ドライバ
CVDシリーズ
多軸タイプ EtherCAT対応
· 省配線、省スペース化を実現。小型・軽量の4軸制御 多軸ドライバ
· 2相 /5相ステッピングモーター、電動アクチュエータを併用可能
· EtherCAT通信での同期運転可能 取付プレートなし 取付プレートなしライトアングル
· エンコーダ情報取り込み、電磁ブレーキ自動制御などの機能を搭載。 品名 : CVD4A-KED 品名 : CVD4AR-KED
上位コスト、プログラム作成時間の削減可能 定価 : 88,000円 定価 : 88,000円
EtherCAT対応・4軸制御で、省配線・省スペース
· EtherCAT通信ケーブル1本で、入出力信号を集約。また、4軸分の通信・電源などの配線をドライバ1台に集約
· 配線工数削減や誤配線トラブルの軽減
· EtherCATマスタによるモーター情報含めた装置情報の一括管理可能
CVDシリーズ多軸タイプドライバ 上位制御機器
160mm
100mm
DC24V電源
質量:110g
● 多軸ドライバのデイジーチェーン接続も可能 ● コネクタ向きライトアングルのタイプは何台か並べたときでも、
メインデバイス 配線がじゃまにならず、より省スペースでの設置が可能。
(IPCにも対応)
EtherCAT EtherCAT EtherCAT
ケーブル ケーブル ケーブル
● ドライバのコネクタ位置を2辺に集約。配線をスッキリとまと
めやすい
Page2
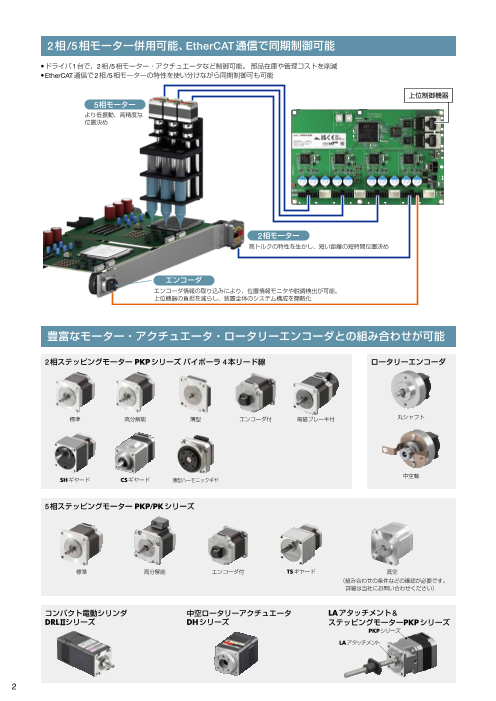
2相 /5相モーター併用可能、EtherCAT通信で同期制御可能
# ドライバ1台で、2相 /5相モーター・アクチュエータなど制御可能。部品在庫や管理コストを削減
# EtherCAT通信で2相 /5相モーターの特性を使い分けながら同期制御可も可能
上位制御機器
5相モーター
より低振動、高精度な
位置決め
2相モーター
高トルクの特性を生かし、短い距離の短時間位置決め
エンコーダ
エンコーダ情報の取り込みにより、位置情報モニタや脱調検出が可能。
上位機器の負担を減らし、装置全体のシステム構成を簡略化
豊富なモーター・アクチュエータ・ロータリーエンコーダとの組み合わせが可能
2相ステッピングモーター PKPシリーズ バイポーラ 4本リード線 ロータリーエンコーダ
標準 高分解能 薄型 エンコーダ付 電磁ブレーキ付 丸シャフト
中空軸
SHギヤード CSギヤード 薄型ハーモニックギヤ
5相ステッピングモーター PKP/PKシリーズ
標準 高分解能 エンコーダ付 TSギヤード 真空
(組み合わせの条件などの確認が必要です。
詳細は当社にお問い合わせください)
コンパクト電動シリンダ 中空ロータリーアクチュエータ LAアタッチメント&
DRL シリーズ DHシリーズ ステッピングモーターPKPシリーズ
PKPシリーズ
LAアタッチメント
2
Page3
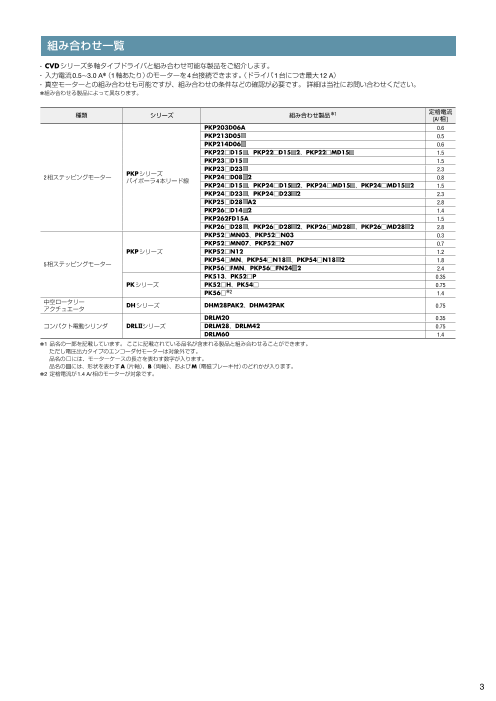
組み合わせ一覧
· CVDシリーズ多軸タイプドライバと組み合わせ可能な製品をご紹介します。
· 入力電流0.5∼3.0 A✽(1軸あたり)のモーターを4台接続できます。(ドライバ1台につき最大12 A)
· 真空モーターとの組み合わせも可能ですが、組み合わせの条件などの確認が必要です。詳細は当社にお問い合わせください。
✽ 組み合わせる製品によって異なります。
種類 シリーズ 組み合わせ製品✽1 定格電流
[A/相 ]
PKP203D06A 0.6
PKP213D05 ■ 0.5
PKP214D06 ■ 0.6
PKP22 □ D15 ■、PKP22□D15 ■ 2、PKP22□MD15 ■ 1.5
PKP23 □ D15 ■ 1.5
PKP23 □ D23 ■ 2.3
2相ステッピングモーター PKPシリーズ
バイポーラ4本リード線 PKP24 □ D08 ■ 2 0.8
PKP24 □ D15 ■、PKP24 □ D15 ■ 2、PKP24 □ MD15 ■、PKP24 □ MD15 ■ 2 1.5
PKP24 □ D23 ■、PKP24 □ D23 ■ 2 2.3
PKP25 □ D28 ■ A2 2.8
PKP26 □ D14 ■ 2 1.4
PKP262FD15A 1.5
PKP26 □ D28 ■、PKP26 □ D28 ■ 2、PKP26 □ MD28 ■、PKP26 □ MD28 ■ 2 2.8
PKP52 □ MN03、PKP52 □ N03 0.3
PKP52 □ MN07、PKP52 □ N07 0.7
PKPシリーズ PKP52 □ N12 1.2
PKP54 □ MN、PKP54 □ N18 ■ 、PKP54 □ N18 ■ 2 1.8
5相ステッピングモーター
PKP56 □ FMN、PKP56 □ FN24 ■ 2 2.4
PK513、PK52 □ P 0.35
PKシリーズ PK52 □ H、PK54 □ 0.75
PK56 □ ✽2 1.4
中空ロータリー
アクチュエータ DHシリーズ DHM28PAK2、DHM42PAK 0.75
DRLM20 0.35
コンパクト電動シリンダ DRL シリーズ DRLM28、DRLM42 0.75
DRLM60 1.4
✽ 1 品名の一部を記載しています。ここに記載されている品名が含まれる製品と組み合わせることができます。
ただし電圧出力タイプのエンコーダ付モーターは対象外です。
品名の□には、モーターケースの長さを表わす数字が入ります。
品名の■には、形状を表わすA(片軸)、B(両軸)、およびM(電磁ブレーキ付)のどれかが入ります。
✽ 2 定格電流が1.4 A/相のモーターが対象です。
3
Page4
エンコーダ情報の取り込みと、位置偏差検出が可能
ドライバにエンコーダ情報を取り込む機能を搭載しています。上位制御機器を介さずドライバで位置偏差を検出して、信号として出力可能
です。またサポートソフトMEXE02を使うことで、モーターの実際の位置・実際の速度をPC画面でモニタできます。
· 高速カウンタ不要、上位制御機器のコストを削減
· EtheCAT通信により上位制御機器に信号を出力。プログラム作成時間を削減
●CVD シリーズ 多軸タイプ ●従来品
高速カウンタ 高速 位置
電源 CPU カウンタ I/O 決め
不要
電源 CPU I/O 通信
PLC側で演算
CVDシリーズ
多軸タイプ
エンコーダ
信号 エンコーダ
信号
エンコーダ付モーター、ロータリーエンコーダ両方に対応
PKPシリーズ ロータリー エンコーダ入力部の仕様
エンコーダ付 エンコーダ 分類 内容 説明
出力形式 インクリメンタル
最高周波数 500 kHz(A相、B相それぞれの周波数)
エッジ間隔 500 nsec以上
A相
B相 カウント範囲 −2,147,483,648∼+2,147,483,647カウント
カウント方式 90度位相差入力
逓倍数 4逓倍
インターフェイス 差動レシーバ✽
入力幅 1 ms以上
分解能 分解能 Z相
インターフェイス 差動レシーバ✽
2相モーター:200P/R、400P/R、 1000P/R 1000P/R、2000P/R
5相モーター:500P/R、1000P/R 5 V電源 出力電圧 DC5 V±10 %
出力 出力電流 200 mA以下
✽ 接続するエンコーダの電気的特性は、26C31相当のものを使用してください。
● サポートソフトMEXE02(無料)により、エンコーダ検出情報のモニタ可能
測定結果は画像ファイルやCSV形式でデータ保存可能
4
Page5
電磁ブレーキ自動制御可能、電源供給も可能
· 電磁ブレーキ制御回路不要、プログラム作成時間削減
· 配線工数削減
●CVD シリーズ 多軸タイプ ●従来品
電磁ブレーキ 電源 電磁ブレーキ用 モーター用
制御電源 /制御回路不要 電源 電源
電磁ブレーキ
制御回路
電磁 電磁
ブレーキ用 ブレーキ用 電磁ブレーキ用
ケーブル ケーブル ケーブル
電磁ブレーキ用ケーブル
センサ用電源の供給可能
●CVD シリーズ 多軸タイプ ●従来品
センサ用 電源
外付け電源 主電源 DC24[V]
が不要 制御電源 DC24[V]
−側LS +側LS −側LS +側LS
原点センサ 原点センサ
アラーム・インフォメーションなど
● アラーム出力
· 位置偏差過大アラーム出力により、モーターの脱調検知が可能
(主回路過熱アラーム等の出力も可能)
● インフォメーション
· ドライバの温度・過電圧・不足電圧等をインフォメーション情報として出力可能
· EtherCAT通信にてモニタ可能
● 主電源 /制御電源の分離
· 外部セーフティリレー別途追加で主電源の遮断に対応
· 主電源遮断中でもEtherCAT通信でのモニタ等が可能
主電源 DC24[V]
制御電源 DC24[V]
● 主電源突入電流の抑制機能
· 主電源投入時に発生する突入電流から、主電源部の
回路を保護する機能を搭載しています。
5
Page6
サポートソフトMEXE02で装置立ち上げからメンテナンスまでサポート
サポートソフトMEXE02を使用することにより、運転データや各種パラメータの設定・編集がおこなえるほか、ティーチング・各種状態
のモニタが可能です。
配線チェックやテスト運転時に役立つ機能をご用意しています。
●パラメータ設定 ●全軸ステータスモニタ ● PDOモニタ ●リモート運転
立ち上げ・
評価
装置設置後のモーター動作の調整に役立つ機能をご用意しています。
●波形モニタ
· オシロスコープのようにモーターの指令速度などを確認可能
· 波形の測定結果を、画像やCSV形式で保存可能
調整
運用開始後のトラブル時の診断やメンテナンスに役立つ機能をご用意しています。
●アラームモニタ ●ユニット情報モニタ ●ステータスモニタ
診断・
メンテナンス
6
Page7
ドライバ各部の名称と機能
パラメータはサポートソフトMEXE02またはEtherCAT通信で設定。
④ ① ② コントローラ部
⑧
③ ⑦
⑥
⑤
⑪
⑨ ⑩
ドライバ部
(AXIS1∼AXIS4)
番号 名称 説明
PWR LED(緑) 制御電源が投入されている間、点灯します。
RUN LED(緑) EtherCATの通信状態を示します。
①
ALM LED(赤) コントローラ部にアラームが発生したときに点滅または点灯します。
ERR LED(赤) EtherCAT通信にエラーが発生したときに点滅します。
② L/A LED(緑) EtherCATのLINK/ACT状態を示します。
③ ALM1∼ALM4 LED(赤) ドライバ部にアラームが発生したときに点滅します。
④ ノードアドレス設定スイッチ ドライバのノードアドレスを設定します。
[SW(1 ×10)、SW(2 ×1)] 出荷時設定:[0 SW(1 ×10):0、SW(2 ×1):0]
⑤ 制御電源コネクタ[CN1] 制御電源を接続します。(DC24 V)
⑥ 主電源コネクタ[CN2] 主電源を接続します。(DC24 V)
⑦ USBコネクタ[CN3] USBケーブルで、MEXE02をインストールしたパソコンを接続します。(USB2.0 mini-Bポート)
⑧ EtherCATコネクタ • CN5 IN:上位側のEtherCAT対応製品と接続します。
[CN5 IN、CN4 OUT] • CN4 OUT:次の号機番号のEtherCAT対応製品と接続します。
⑨ モーターコネクタ
[CN100、CN200、CN300、CN400] モーター、電磁ブレーキ、およびエンコーダを接続します。
⑩ I/Oコネクタ
[CN101、CN201、CN301、CN401] 入出力信号を接続します。
⑪ 取付穴 ねじでドライバを取り付けます。
7
Page8
"製品仕様 "通信仕様
主電源 入力電圧 DC24 V±10 % 通信規格 IEC 61158 Type12
主電源 最大入力電流 1軸あたり0.5∼3.0A✽(最大12A) 物理層 /プロトコル 100 BASE-TX(IEEE 802.3)
制御電源 入力電圧 DC24 V±5 % 伝送速度 100 Mbps
制御電源 最大入力電流 1.3 A(センサ用電源を除く) ・Free Runモード:1 ms以上
制御入力 4点、フォトカプラ 通信サイクル ・SM2イベント同期モード:1 ms以上
制御出力 1点、フォトカプラ・オープンコレクタ ・DCモード:0.5 ms、1 ms、2 ms、3 ms、4 ms、
フィールドネットワーク EtherCAT 5 ms、6 ms、7 ms、8 ms
RJ45×(2 シールド対応)
✽ 組み合わせる製品によって異なります。
通信ポート /コネクタ ECAT IN:EtherCAT入力
ECAT OUT:EtherCAT出力
トポロジ ディジーチェーン(最大65,535ノード)
プロセスデータ 可変PDOマッピング
・SM0:メールボックス出力
シンクマネージャー ・SM1:メールボックス入力
・SM2:プロセスデータ出力
・SM3:プロセスデータ入力
・エマージェンシーメッセージ
メールボックス ・SDOリクエスト
(CoE) ・SDOレスポンス
・SDOインフォメーション
・Free Runモード(非同期)
同期モード ・SM2イベント同期モード
・DCモード(SYNC0イベント同期)
デバイスプロファイル IEC 61800-7 CiA402ドライブプロファイル
"外形図 (単位 mm)
● 取付プレートなし ● 取付プレートなしライトアングル
質量 0.11kg 質量 0.11kg
160 160 7.9
153 153
6×ϕ3.5 穴 3.5 68 5×ϕ3.5 穴 3.5 68
"接続ケーブル ドライバ側 "入出力信号用ケーブル
● 種類と価格 ● 種類と価格
品名 種類 長さ (m) 定価 品名 種類 長さ (m) 定価
LCD06CA-2M 2相 標準タイプ 1,200円 LCD06CA-S 入出力信号用 0.6 1,800円
LCD06CA-2MB 2相 標準タイプ 電磁ブレーキ付 1,600円
LCD06CA-2ME 2相 標準タイプ エンコーダ付 2,800円
0.6
LCD06CA-5M 5相 標準タイプ 1,200円 "主電源用ケーブル
LCD06CA-5MB 5相 標準タイプ 電磁ブレーキ付 1,600円
LCD06CA-5ME 5相 標準タイプ エンコーダ付 2,800円 ● 種類と価格
品名 種類 長さ (m) 定価
LC02D06C 主電源用 0.6 1,600円
"制御電源用ケーブル
● 種類と価格
接続ケーブル ドライバ側 入出力信号用ケーブル 主電源用ケーブル 制御電源用ケーブル 品名 種類 長さ (m) 定価
LC02D06D 制御電源用 0.6 1,400円
● は、 日本その他の国におけるオリエンタルモーター株式会社の登録商標または商標です。 お問い合わせ先
お客様ご相談センター
製品に関する技術的なお問い合わせ、購入についてのご相談はこちらまで。
受付時間 平日 / 9:00~ 19:00 TEL
(土日祝日・その他当社規定による休日を除く) 0120-925-410 FAX 0120-925-601
E-mail webts@orientalmotor.co.jp
www.orientalmotor.co.jp/ja オリエンタルモーター CVDシリーズ 多軸タイプ 検索
2024 年 11 月制作 © 2024 Copyright ORIENTAL MOTOR CO.,LTD. V-222-4
4 max. 19.1 100
1.6 3.5 93
4 max. 14.3 2.4 100
1.6 3.5 93