




バッテリレスアブソリュートセンサ搭載【コンパクトな装置での高精度な位置決めに】
ステッピングモーターとボールねじを一体化し、直線動作を実現した、
コンパクト電動シリンダです。
バッテリレスアブソリュートセンサを採用したAZシリーズを搭載。
高精度位置決め・微細送りに好適です。
【特徴】
■精密ボールねじ採用で高精度位置決めを実現
■安定した微細送り/低速もなめらかな動き
■装置立ち上げまでの時間を短縮
■バッテリレス
■外部センサ不要
■簡易シーケンス機能でプログラムを簡略化
※詳しくはPDF資料をご覧いただくか、お気軽にお問い合わせ下さい。
このカタログについて
| ドキュメント名 | コンパクト電動シリンダ αSTEP AZシリーズ搭載 DRシリーズ/DRS2シリーズ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 8.1Mb |
| 取り扱い企業 | オリエンタルモーター株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
コンパクト電動シリンダ
AZシリーズ搭載
DRシリーズ
DRS2シリーズ
バッテリレスアブソリュートセンサを搭載。
先進の高精度位置決めをよりコンパクトに。
Page2
高精度位置決め·微細送りに最適です
精密ボールねじ: ±0.003mm
繰り返し位置決め精度 転造ボールねじ: ±0.01mm
最小移動量(出荷時設定値) 0.001mm
とボールねじを一体化したコンパクトな電動シリンダ
コンパクト電動シリンダ AZ シリーズ搭載
DRシリーズ 取付角寸法 20mm、28mm
DRS2シリーズ 取付角寸法 42mm、60mm
とボールねじを一体化した構造
高精度な とボールねじ✽を組み合わせることで、高精度な 駆動モーターに AZシリーズを搭載しています。
位置決めを実現します。 # バッテリレスのアブソリュートセンサ内蔵、
また、カップリングなどの連結部品を使用せず、中空ローターと 外部センサ不要でモーター位置情報を常時監視
ボールねじナットを一体化することで、部品の剛性や組み合わせ # クローズドループ制御による高信頼性
によるバックラッシの影響を抑えています。 # 高効率化により、モーター発熱低減、省エネルギー
✽ 精密と転造の2種類の駆動用ボールねじをご用意しています。
テーブル ボールねじナット 中空ローター
リニアガイド
エンコーダ
(ABZOセンサ)
大口径軸受 バッテリレス
アキシアル荷重をダイレクトに支持 アブソリュートセンサ
ボールねじ ボールねじナットと中空ローターを直結 (ABZOセンサ)
2
Page3
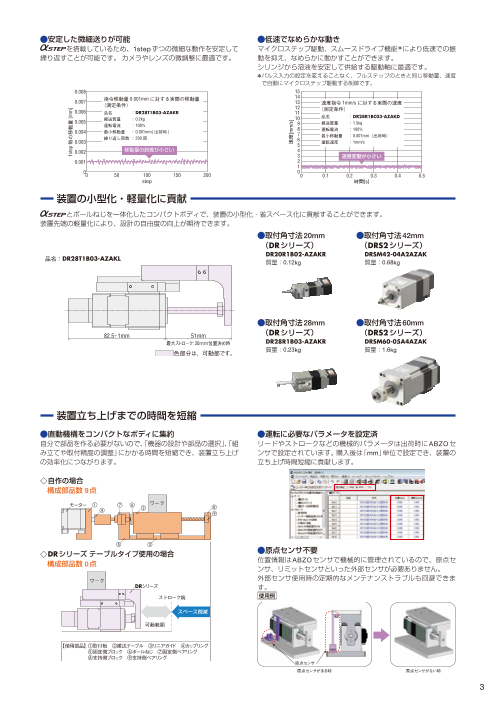
● 安定した微細送りが可能 ● 低速でなめらかな動き
を搭載しているため、1stepずつの微細な動作を安定して マイクロステップ駆動、スムースドライブ機能✽により低速での振
繰り返すことが可能です。カメラやレンズの微調整に最適です。 動を抑え、なめらかに動かすことができます。
シリンジから溶液を安定して供給する駆動軸に最適です。
✽ パルス入力の設定を変えることなく、フルステップのときと同じ移動量、速度
で自動にマイクロステップ駆動する制御です。
0.008 15
14
0.007 指令移動量 0.001mmに対する実際の移動量
(測定条件) 13 速度指令 1mm/sに対する実際の速度
12
0.006 (測定条件)
品名 : DR28T1B03-AZAKR 11
10 品名 : DR28R1BC03-AZAKD
0.005 搬送質量 : 0.2kg
運転電流 : 100% 9 搬送質量 : 1.5kg
0.004 最小移動量 : 0.001mm(出荷時 ) 8 運転電流 : 100%
7
繰り返し回数 : 200回 最小移動量 : 0.001mm(出荷時)
0.003 6
5 運転速度 : 1mm/s
0.002 移動量の誤差が小さい 4
3 速度変動が小さい
0.001 2
1
0 0
0 50 100 150 200 0 0.1 0.2 0.3 0.4 0.5
step 時間[s]
装置の小型化・軽量化に貢献
とボールねじを一体化したコンパクトボディで、装置の小型化・省スペース化に貢献することができます。
装置先端の軽量化により、設計の自由度の向上が期待できます。
● 取付角寸法20mm ● 取付角寸法42mm
(DRシリーズ) (DRS2シリーズ)
DR20R1B02-AZAKR DRSM42-04A2AZAK
品名:DR28T1B03-AZAKL 質量:0.12kg 質量:0.68kg
● 取付角寸法28mm ● 取付角寸法60mm
82.5±1mm 51mm (DRシリーズ) (DRS2シリーズ)
最大ストローク:30mm位置決め時 DR28R1B03-AZAKR DRSM60-05A4AZAK
色部分は、可動部です。 質量:0.23kg 質量:1.6kg
装置立ち上げまでの時間を短縮
● 直動機構をコンパクトなボディに集約 ● 運転に必要なパラメータを設定済
自分で部品を作る必要がないので、「機器の設計や部品の選択」、「組 リードやストロークなどの機械的パラメータは出荷時にABZOセ
み立てや取付精度の調整」にかかる時間を短縮でき、装置立ち上げ ンサで設定されています。 購入後は「mm」単位で設定でき、装置の
の効率化につながります。 立ち上げ時間短縮に貢献します。
◇ 自作の場合
構成部品数 9点
モーター ① ⑦ ⑥ ワーク
④ ② ⑧
⑨
⑤ ③
◇ DRシリーズ テーブルタイプ使用の場合 ● 原点センサ不要
構成部品数 0点 位置情報はABZOセンサで機械的に管理されているので、原点セ
ンサ、リミットセンサといった外部センサが必要ありません。
ワーク 外部センサ使用時の定期的なメンテナンストラブルも回避できま
DRシリーズ す。
ストローク端 使用例
スペース削減
可動範囲
【 使 用 部 品 】①取付板 ②搬送テーブル ③リニアガイド ④カップリング
⑤固定側ブロック ⑥ボールねじ ⑦固定側ベアリング
⑧支持側ブロック ⑨支持側ベアリング
原点センサ
原点センサがある時 原点センサがない時
3
1step毎の移動量 [mm]
速度[mm/s]
Page4
ラインアップ
● 取付角寸法20mm、28mm(DRシリーズ)
ボールねじ
タイプ 取付角 ケーブル 取付
寸法 ストローク 引き出し方向 プレート 価格帯 接続ケーブル
種類 リード
テーブルタイプ
精密 /
14
20mm 25mm 精密 1,900円
1mm
カバー付 ∼148,500円
転造 / なし
転造 113,500円
1mm 下 /右 /左 フランジ付
カバー付 フート付 ∼120,100円
シリンダに負荷を固定でき
る高剛性ガイドを付けた製 28mm 30mm
品です。負荷の直接取り付
けが容易です。 精密 /
精密 1mm / 132,200円
カバー付 2.5mm ~138,800円
モーター/エンコーダ用
ロッドタイプ
精密 0.5~20m
/
20mm 25mm 精密 1mm なし 116,600円
カバー付 ∼118,800円
転造 /
転造 上 /下 / 90,400円
ガイドなどがないコンパク 1mm
ト形状のため、装置に直接 カバー付 右 /左 ∼97,000円
組み込むことが可能です。 なし
また、装置の負荷搬送用ガ 28mm 30mm フート付
イド部にコンパクトな推力 精密 /
軸としてご使用いただける 精密 1mm / 109,100円
製品です。 カバー付 2.5mm ∼115,700円
◇ ボールねじカバー付 ◇ 取付プレート付
簡易防塵用のボールねじカバーがついた製品をご用意しています。 取付プレートがついた製品をご用意しています。「フランジ」を使
用して背面から取り付けるタイプと、「フート」を使用して上面か
ら取り付けるタイプの2種類をご用意しています。
ボールねじカバー
フランジ フート
4
Page5
● 取付角寸法42mm、60mm(DRS2シリーズ)
タイプ 取付角 ボールねじ
寸法 ストローク ケーブル
引き出し方向 電磁ブレーキ 価格帯 接続ケーブルセット
種類 リード
ガイド付タイプ ●電磁ブレーキなし
転造 2mm/ 88,000円
8mm ∼117,700円
なし /
42mm 40mm 右 /左 電磁ブレーキ付 モーター用
シリンダに負荷を固定でき
る高剛性ガイドを付けた製 精密 117,900円
2mm
品です。負荷の直接取り付 ∼137,700円
けが容易です。 エンコーダ用
ガイドなしタイプ ●電磁ブレーキ付
転造 2mm/ 63,800円
8mm ∼93,500円
42mm 40mm モーター用
ガイドなどがないコンパク 精密 2 − なし / 93,700円
mm
ト形状のため、装置に直接 電磁ブレーキ付 ∼113,500円
組み込むことが可能です。 エンコーダ用
また、装置の負荷搬送用ガ
イド部にコンパクトな推力
軸としてご使用いただける
製品です。 60mm 50mm 転造 82,500円
4mm ∼102,300円 電磁ブレーキ用
0.5~20m
◇ 電磁ブレーキ付
電源OFF時に停止位置を保持します。垂直方向に取り付けても、
メンテナンスの作業中にワークが落下する心配がありません。
電磁ブレーキ部
● ドライバ DC電源入力
AZシリーズ
位置決め機能内蔵 RS-485通信付き パルス列入力 ネットワーク対応 miniドライバ✽ ネットワーク対応
タイプ パルス列入力タイプ タイプ ドライバ 多軸ドライバ✽
ドライバ種類
Modbus(TCP、UDP)
Modbus(RTU)
RS485通信付きパルス列入力
電源入力 24V/48V
● ドライバと接続ケーブルの「品名・価格」 ➜ 48ページ。
それ以外のドライバの詳細情報は当社WEBサイトにてご確認ください。
✽ 製品の詳細は、当社WEBサイトをご覧ください。
5
Page6
セレクション
● 取付角寸法20mm、28mm(DRシリーズ)
動的許容モーメント 可搬質量
取付角 [N·m] 精度 [kg]
タイプ 寸法 ストローク ボールねじ リード 速度 推力
[mm] 種類 繰り返し [mm] [mm/s] [N]
[mm] MP MY MR 位置決め精度 ロストモーション
平 垂直
[ [mm] 水
mm]
テーブルタイプ 0.003
20 0.1 0.05 0.15 25 精密 ±
0.02以下 1 0.5 1
[±0.01]✽
転造 ±0.01 0.05以下 1 4 4
28 0.3 0.24 1.5 30 1 4 4
精密 ±0.003
[±0.005]✽
0.02以下
2.5 4 2
ロッドタイプ 20 25 精密 ±0.003 0.02以下 1 1.5 1.5
転造 ±0.01 0.05以下 1 4 4
−
28 30 1 4 4
精密 ±0.003 0.02以下
2.5 4 2
✽ 条件によって仕様は異なります。 詳細は、各製品の仕様をご確認ください。
● 取付角寸法42mm、60mm(DRS2シリーズ)
動的許容モーメント 度 可搬質量
取付角 [ 精
N·m] [kg]
タイプ 寸法 ストローク ボールねじ リード 速度 推力
[mm] 種類 繰り返し [mm] [mm/s] [N]
[mm] MP MY MR 位置決め精度 ロストモーション
[ [ 水平 垂直
mm]
mm]
ガイド付タイプ 2 10 10
転造 ±0.01
0.05以下
[±0.02]✽
42 1.3 1.0 2.5 40 8 5 5
精密 ±0.003
0.02以下 2 10 10
[±0.005]✽
ガイドなしタイプ 2 40 20
転造 ±0.01 0.05以下
42 40 8 10 5
−
精密 ±0.003 0.02以下 2 40 20
60 50 転造 ±0.01 0.05以下 4 50 50
✽ 条件によって仕様は異なります。 詳細は、各製品の仕様をご確認ください。
6
Page7
セレクション
● 取付角寸法20mm、28mm(DRシリーズ)
動的許容モーメント 可搬質量
取付角 [N·m] 精度 [kg]
タイプ 寸法 ストローク ボールねじ リード 速度 推力
[mm] 種類 繰り返し [mm] [mm/s] [N]
[mm] MP MY MR 位置決め精度 ロストモーション
水 垂直
[ [ 平
mm]
mm]
テーブルタイプ 20 0.1 0.05 0.15 25 精密 ±0.003
[±0.01]✽
0.02以下 1 20 15 0.5 1
転造 ±0.01 0.05以下 1 40 40 4 4
28 0.3 0.24 1.5 30 1 40 40 4 4
精密 ±0.003
[±0.005]✽
0.02以下
2.5 100 20 4 2
ロッドタイプ 20 25 精密 ±0.003 0.02以下 1 20 15 1.5 1.5
転造 ±0.01 0.05以下 1 40 40 4 4
−
28 30 1 40 40 4 4
精密 ±0.003 0.02以下
2.5 100 20 4 2
✽ 条件によって仕様は異なります。 詳細は、各製品の仕様をご確認ください。
● 取付角寸法42mm、60mm(DRS2シリーズ)
動的許容モーメント 精度 可搬質量
取付角 [N·m] [kg]
タイプ 寸法 ストローク ボールねじ リード 速度 推力
[mm] 種類 繰り返し ロス [mm] [mm/s] [N]
[mm] MP MY MR 位置決め精度 トモーション
[ [mm] 水平 垂直
mm]
ガイド付タイプ 2 50 200 10 10
転造 ±0.01
[±0.02]✽
0.05以下
42 1.3 1.0 2.5 40 8 200 50 5 5
精密 ±0.003
[±0.005]✽
0.02以下 2 50 200 10 10
ガイドなしタイプ 2 50 200 40 20
転造 ±0.01 0.05以下
42 40 8 200 50 10 5
−
精密 ±0.003 0.02以下 2 50 200 40 20
60 50 転造 ±0.01 0.05以下 4 50 500 50 50
✽ 条件によって仕様は異なります。 詳細は、各製品の仕様をご確認ください。
7
Page8
用途例
● DRシリーズ
テーブルタイプ /ロッドタイプ CCDカメラのフォーカス XYステージの駆動
● DRS2シリーズ
ガイド付タイプ ディスペンサの駆動 ピンの圧入
ガイドなしタイプ マイクロプレート用自動分注装置
8
Page9
取付参考例
● DRシリーズ
テーブルタイプ /ロッドタイプ
取付方法は、正面取付と側面取付の2種類です。 取付プレート(フランジ✽、フート✽)付の製品は、フランジを使った
背面からの取り付け、フートを使った上面からの取り付けも可能です。
✽ 材質:アルミ 表面処理:なし
・正面取付 ・側面取付 ・フランジを使った取り付け ・フートを使った取り付け
(ロッドタイプを除く) (DR20ロッドタイプを除く)
● 図はテーブルタイプです。
● DRS2シリーズ
ガイド付タイプ /ガイドなしタイプ
取付方法は、正面取付です。
● 図はガイド付タイプです。
● 取り付けについての詳細は取扱説明書をご覧ください。
9
Page10
AZシリーズ搭載
アブソリュートシステムによる
簡単な原点設定、原点復帰
小型の機械式多回転アブソリュートセンサ<ABZOセンサ>を
開発しました(特許取得)。生産性の向上や、コスト削減に貢献
できます。
バッテリレス
アブソリュートセンサ
(ABZOセンサ)
外部センサ不要 原点復帰不要
アブソリュートシステムのため、原点センサ、リミットセンサな 位置決め運転中に電源が遮断されても、位置情報は保存されます。
どの外部センサが不要です。 位置決め機能内蔵タイプの場合、生産ラインでの非常停止時や停
電時からの復旧の際、原点復帰をしなくても位置決め運転を再開
高速原点復帰 できます。
外部センサを用いずに原点復帰が可能なため、センサ感度を気に
せず高速で原点復帰がおこなえ、マシンサイクルの短縮につなが 非常停止
ります。 ABZOセンサ
コストダウン
センサ費用や配線費用が削減でき、システムコストダウンが図れ 原点復帰せずに
ます。 再開可能
省配線
省配線となり、装置設計の自由度がアップします。 バッテリレス
外部センサ誤作動の影響をうけない 機械式センサのためバッテリが不要です。位置情報はABZOセン
外部センサの誤動作や故障、断線といった心配がありません。 サで機械的に管理されているため、電源を落としても、モーター/
ドライバ間のケーブルを外しても、位置情報を保持できます。
原点復帰精度向上
原点センサ感知のばらつきを気にすることなく原点復帰をおこな メンテナンスの削減
えるため、原点の精度を向上できます。 バッテリの交換が必要なく、メンテナンスの手間やコストを削減
原点復帰精度は、繰り返し位置決め精度と同一です。 できます。
● リミットセンサを取り付けない場合、ドライバのソフトウェアリミットを使用
すると、限界値を超える動作を防げます。 自由なドライバの設置
バッテリ交換用のスペース確保も不要なため、ドライバの設置場
簡単な原点設定 所の制約がなく、制御盤等のレイアウト設計の自由度が上がりま
ドライバ表面のスイッチを押すことで簡単に原点を設定でき、 す。
ABZOセンサで原点位置を保存します。 また、サポートソフト
(MEXE02)や外部入力信号からの原点設定も可能です。 海外輸送も安心
バッテリは自己放電するため、海外輸送といった長期間の装置搬
送では注意が必要です。ABZOセンサはバッテリ不要であり、位
置情報の保持に期限はありません。またバッテリを海外に輸出す
る際の各種規制等も考慮する必要がありません。
モーター/ドライバ間のケーブルを外しても位置保持
位置情報はABZOセンサ内で保持します。
HOME PRESET
スイッチ
10
Page11
充実の押し当て機能
● 押し当て力と時間を自在に変更できます
DRシリーズ、DRS2シリーズは位置決め運転完了後、簡単に押し当て運転に移行できます。また押し当て力と時間を自在に変更できます。
ご注意
DRシリーズのリード1mmのシリンダでは、押し当て運転は行わないでください。
押し当て運転が完了する前にTLC信号が出力されてしまい、押し当て運転が正常に完了しないことがあります。
メリット
# 運転データNo.ごとに押し当て力と押し当て時間を設定できるので、データNo.を選択して、簡単に変更ができます。
# 位置がずれないように力を落とし、ゆっくり圧入する段階と、短時間で力を上げて押し込むような段階で使い分けが可能です。
<押し当て力と押し当て時間>
① ② ③ 時間
① ② ③
圧入開始。 徐々に強い力で さらに強い力で
最初は力を抑え 圧入。 最後まで圧入。
て圧入。
● 低速で押し付けができます
高速でワークにアプローチ。当たる直前に減速して、低速で押し付けることができます。
メリット
# 押し付け時に衝撃がほとんど発生しないため、衝撃吸収のためのクッション機構が不要です。
# 押し当ての直前まで高速でアプローチできるため、装置のタクトタイム短縮につながります。
①
②
③
時間
① ② ③
ワークに高速で ワークに当たる 押し付けた後、
アプローチ。 直前で減速し、 押し当て運転を
低速で押し付ける。 開始。
● パルス列入力タイプも押し当て運転ができます
T-MODE入力を設定することで、パルス列入力タイプも過負荷アラームが発生することなく、押し当て運転が可能です。
パルス列制御をおこなっていて、押し当て運転が必要になった場合に便利です。
WEBサイトの「動画ライブラリー」にて動画を公開中
動画はこちら 動画はこちら
11
速度 [mm/s] 押し当て力 [N]
Page12
● 外部センサなしでワークの入れ忘れを検知することができます。
ドライバからの出力信号(TLC出力、IN-POS出力)によってワークの有無を確認できます。
IN-POS 出力信号
出力信号から
ワークの有無の判定
IN-POS出力 : 位置決め運転が完了したときに出力されます。
TLC出力 :押し当て運転中、出力トルクが設定したトルク制限値に達すると
出力されます。
圧入スタート 正常に圧入完了 ワーク入れ忘れ
OK NG
AZシリーズ「 位置決め機能内蔵タイプ」 のドライバを使用した動作例
ドライバの入出力信号を設定することで簡単に実現できます。
運転データ、パラメータの設定は、サポートソフトMEXE02で簡単に行うことができます。
動作・タイミングチャート
・正常に圧入 ・ワーク入れ忘れ
運転データ 運転データ
No.0 No.0
圧入開始 正常に ワークに押し当らず、
圧入完了 運転終了
速 速
度 度
時間 時間
押 押
し し
当 当
て て
力 時間 力 時間
D-SEL0 入力 D-SEL0 入力
MOVE出力 MOVE出力
TLC出力 IN-POS出力
運転データ
名前 方式 位置[mm] 速度[mm/s] 運転電流[%]
No.0 圧入 絶対位置決め押し当て 30 5 30
● 真似するだけで、プログラムできる 簡易シーケンス
AZシリーズの簡易シーケンスや各機能を使用した、活用事例を解説しています。
より具体的・実践的な活用方法を、わかりやすく丁寧に解説していきます。
詳細は、当社WEBサイトをご覧ください。
詳細はこちら
12
Page13
様々な運転パターンと入出力信号
(位置決め機能内蔵タイプのドライバなどが対象です。)
運転データをドライバに設定し、上位から運転データの選択、実行をすることができます。
さらに運転データを結合したり、内外の信号のON、OFFをきっかけに別の運転データに移行することができます。
● 運転パターン
位置決めSD運転 位置決め押し当てSD運転 形状接続運転
速 速 速 運転データNo.0 運転データNo.1
度 最大256ポイントのデータ設定が可能 度 ワークに押し当った 度
(ワークをつかんだ)
時間 時間 時間
START入力 START入力 START入力
MOVE出力 MOVE出力 MOVE出力
IN-POS出力 TLC出力 TLC出力
モーターの運転速度や位置(移動量)などを運 モーターの運転速度や位置(移動量)などを 運転を停止せずに、「結合先」に設定した運
転データに設定することで、現在位置から目 運転データに設定することで、現在位置か 転データに移行します。
標位置に向かって台形駆動を行ないます。 ら目標位置に向かって自起動運転を行ない
ます。TLC出力を押し当て運転の完了信号
として使用すると、運転中に負荷との押し
当てが起きたか判断することができます。
● 出力信号
MAREA出力 AREA出力
速 運転データNo.1 運転データNo.2
度
速 オフセット量
度
時間
AREA0出力
幅 幅 時間
AREA+方向位置 AREA-方向位置 位置
MAREA出力
AREA1出力 位置
AREA-方向位置 AREA+方向位置
モーターが設定したエリアにあると、 モーターが、運転データごとに設定したエ
MAREA出力がONになります。信号が出力 リアにあると、AREA出力がONになります。
する範囲の基準・オフセット量・幅を設定 詳細の設定は、取扱説明書の「AREA範囲指
することができます。 定方法」をご確認ください。
割付 信号名 機能
1 FREE モーターの電流を遮断して無励磁にします。電磁ブレーキ付の場合は、電磁ブレーキを解放します。
2 C-ON モータを励磁します。
21 T-MODE 過負荷のアラームを無効にします。
入力
信号 22 CRNT-LMT 電流制限を行ないます。
23 SPD-LMT 速度制限を行ないます。
33 SSTART ストアードデータ運転を実行します。手動順送運転のときは、結合先の運転を実行します。
40~ 47 D-SEL0~D-SEL7 ダイレクト位置決め運転を実行します。
134 MOVE モーターが動作中のときに出力されます。
138 IN-POS 位置決め運転が完了したときに出力されます。
140 TLC 出力トルクが上限値に到達すると出力されます。
出力
信号 141 VA 運転速度が目標速度に到達すると出力されます。
144 HOME-END 高速原点復帰運転や原点復帰運転の終了時、および位置プリセットの実行時に出力されます。
159 MAREA モーターが運転データに設定したエリア内にあるときに出力されます。
160~ 167 AREA0~ AREA7 モーターがエリア内にあるときに出力されます。
13
Page14
目的に合わせて選べるドライバ
● 単軸ドライバ
インターフェースの種類、電源入力の種類が豊富です。
高トルクを発揮できるAC電源入力ドライバは、位置決め時間の短縮に貢献します。
コンパクトサイズのDC電源入力ドライバは、装置の小型化、省スペース化、軽量化に貢献します。
目的や用途に合わせてご検討ください。
✽DRシリーズ /DRS2シリーズは、DC電源入力ドライバと組み合わせてお使いいただけます。
◇ ネットワーク対応ドライバ AC電源入力 DC電源入力
全世界で使用されている、主要な産業用ネットワークに対応しています。
装置情報の一元管理、省配線などに貢献します。
● 対応インターフェース:EtherCAT、EtherNet/IP、PROFINET、MECHATROLINK-Ⅲ、SSCNETⅢ /H、Modbus(RTU)
◇ 位置決め機能内蔵タイプ
#「 位置」や「速度」などの運転データをドライバに設定
し、I/Oユニットなどで運転データの選択と実行をお I/Oで コンピュータまたは シリアル通信で FAネットワークで
制御する場合 タッチパネルから 制御する場合 制御する場合
こないます。運転データは最大256点まで登録でき 制御する場合
CPU 位置決め CPU CPU
ます。 電源 ユニット 電源 シリアル通信 電源 FA ネットワーク
I/O 不要 ユニット ユニット
# I/O、Modbus(RTU)、ネットワークコンバータ(ゲ
ートウェイ)のいずれかの方法で制御できます。ネ
ットワークコンバータを併用するとCC-Linkによる FAネットワーク
制御が可能です。
I/O Modbus(RTU) Modbus(RTU) ネットワーク
コンバータ(別売)
RS-485
モーターの運転に必要な情報をドライバに持たせるため、上位PLCの負担が軽減します。複数軸制御の場合の
システム構成がシンプルになります。サポートソフト、もしくはRS-485通信による設定となります。
◇ RS-485通信付き パルス列入力タイプ
ドライバに入力されたパルス信号に応じて、運転を実
行します。モーターのステータス情報(位置、速度、 コンピュータまたは
タッチパネルから
トルク、アラーム、温度など)を、 RS-485通信でモニ 位置、速度
制御する場合 パルス列入力
タできます。 CPU
電源 シリアル通信
ユニット
位置決め
ユニット
Modbus(RTU)
モーターのステータス情報
◇ パルス列入力タイプ
ドライバに入力されたパルス信号に応じて、運転を実
行します。アラーム履歴の確認や各種状態を、サポー
トソフト MEXE02でモニタできます。 CPU
電源 I/O 位置決め 位置、速度
ユニット
パルス列入力
● miniドライバ モバイルオートメーション対応製品
小型・軽量を追求しました。狭いスペースにも設置できます。
バッテリ電源で使用できるワイドな電圧仕様のため、自走装置への組み込みにも適しています。
●「 モバイルオートメーション対応製品」とは
「モバイルオートメーション対応製品」は、バッテリ駆動・小型軽量を共通コンセプトとする製品群です。自走装置や
移動設備への搭載に最適で、今後一層求められる自由自在な自動化ライン、モバイルオートメーションの実現に貢献
します。
● 多軸ドライバ
ドライバ1台で複数軸(最大4軸)を制御できます。上位制御機器や電源との接続がドライバ1台
に集約されるため、省スペース化、省配線化に貢献します。
● 製品の詳細については、それぞれの個別カタログをご覧ください。
14
Page15
サポートソフトMEXE02でパソコンから簡単駆動
サポートソフトを使用することにより、データの設定や実際の駆動、また各種モニタ機能による確認が、パソコン上で簡単におこなえます。
● サポートソフトMEXE02
サポートソフトは当社WEBサイトからダウンロードできます。
● ティーチング・リモート運転 ● I/Oモニタ
サポートソフト上から、簡単に原点設定やモーターを駆動させる 入力信号のモニタと、出力信号の強制出力がおこなえます。上位
ことが可能です。上位システムと接続する前のティーチングや試 システムとの結線やネットワーク I/Oの動作確認などにご使用くだ
運転時などにご使用ください。 さい。
ステータス
簡易モニタ
テスト運転
ティーチング
各種モニタ機能
● 波形モニタ ● アラームモニタ ● ステータスモニタ
オシロスコープのようなイメージで、モー 異常が発生したときに、異常の内容や発生 運転時の速度、モーター、ドライバの温度、
ターの運転状態や出力信号の状態をモニタ 時の運転状態、対処方法が確認できます。 負荷率のモニタのほか、使用開始時からの
することができます。装置の立上げ・調整 積算回転量などもモニタできます。それぞ
時などにご使用ください。 れの項目について、任意に信号を出力させ
ることができるので、効率的なメンテナン
スにも有効です。
①
②
③
④
①指令位置に対して実際の位置を検出します。
②指令速度に対して実際の速度を検出します。
③ モーターのエンコーダ部、ドライバ内部の温度を検出
します。
④ 回転中の速度における出力トルクを100%として、現
在の負荷率を表示します。
● マルチモニタリング対応のため、モニタしながらリモート運転をおこなったり、ティーチングすることができます。
見るだけで、設定できる 使い方ナビ
配線などの運転準備から、位置決め運転の基本設定を動画でご紹介しています。
詳細については、当社WEBサイトをご覧ください。
動画はこちら
15
Page16
DRシリーズ
"システム構成
● コンパクト電動シリンダと、DC電源入力 位置決め機能内蔵タイプのドライバまたは、
RS-485通信付き パルス列入力タイプのドライバを組み合わせた場合
I/O 制御または、RS-485通信で接続する場合の構成例です。
コンパクト電動シリンダ、ドライバ、接続ケーブル / 可動接続ケーブルは、別手配です。
● 他のタイプのドライバと組み合わせたシステム構成については、WEBサイトをご覧ください。
必ずご購入ください
必要に応じてご購入ください
ドライバ
コンパクト電動シリンダ 接続ケーブル ➜ 48ページ
モーター/エンコーダ用
●接続ケーブルに継ぎ足して使用する「中継ケーブル」や可動部分に使用可能な
「可動ケーブル」などいろいろな種類・長さのケーブルをご用意しています。
DC電源用ケーブル ➜ WEBサイト
DC電源
(主電源)
サポートソフトMEXE02 お客様にて、
ご用意ください。
●サポートソフトMEXE02は USBケーブル
当社WEBサイトから
ダウンロードいただけます。
上位接続機器との接続は、I/O制御、FAネットワーク制御、
Modbus制御の3方式からお選びいただけます。 入出力信号用ケーブル ➜ WEBサイト
I/O制御の場合
ネットワーク
上 コンバータ
位 ➜ WEBサイト RS-485 通信ケーブル ➜ WEBサイト
制 FAネットワーク制御の場合
御
機
器
FLEX用通信ケーブル ➜ WEBサイト
Modbus制御の場合
●システム構成価格例
ケーブル
コンパクト電動シリンダ ドライバ 接続ケーブル 入出力信号用ケーブル
(1m) コネクタ付タイプ(1m)
DR28T1A03-AZAKD AZD-KD CC010VZ2F2 CC24D010C-1
113,500円 42,900円 3,300円 8,200円
● 上記システム構成は一例です。他の組み合わせもございます。
ご注意
● モーターから出ているモーター/エンコーダケーブルは、ドライバに直接接続できません。 ドライバに接続する場合は、接続ケーブルをお使いください。
16
Page17
"品名の見方 DR
シリーズ
● コンパクト電動シリンダ
DR 28 T 2.5 BC 03 - AZ A K R - P システム構成
品名の見方
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩ ⑪
種類と価格
① シリーズ名 DR:DRシリーズ
② 取付角寸法 20:20mm
28:28mm 仕様・特性
③ 形状 T:テーブルタイプ
R:ロッドタイプ
④ リード 1:1mm
2.5: 外形図
2.5mm
ボールねじ種類 A:転造ボールねじ
AC
⑤ :転造ボールねじ カバー付
B:精密ボールねじ DRS2
BC:精密ボールねじ カバー付 シリーズ
⑥ ストローク 02:25mm
03:30mm システム
⑦ 搭載モーター AZ:AZシリーズ 構成
⑧ 付加機能 A:なし
⑨ モーター仕様 K:DC電源入力仕様
品名の見方
ケーブル引き出し方向✽ U:上方向 種類と価格
D
⑩ :下方向
R:右方向
L:左方向
仕様・特性
取付プレート なし:取付プレートなし
⑪ F:フランジ付
P:フート付
✽ ケーブル引き出し方向は、側面取付部を下にして、出力軸の反対側から見たときの方向を表しています。 外形図
テーブルタイプ ロッドタイプ
AZシリーズ
U:上 ドライバ /
接続ケーブル
L:左 R:右
周辺機器
L:左 R:右
側面取付部 D:下 側面取付部
側面取付部 D:下 側面取付部
17
Page18
"種類と価格
● コンパクト電動シリンダ
◇ テーブルタイプ
# 取付角寸法20mm # 取付角寸法20mm
精密ボールねじ 精密ボールねじ カバー付
リード 取付 リード 取付
[mm] プレート 品名 定価 [ 品名 定価
mm] プレート
DR20T1B02-AZAKD DR20T1BC02-AZAKD
なし DR20T1B02-AZAKR 141,900円 なし DR20T1BC02-AZAKR 144,100円
DR20T1B02-AZAKL DR20T1BC02-AZAKL
DR20T1B02-AZAKD-F DR20T1BC02-AZAKD-F
1 フランジ付 DR20T1B02-AZAKR-F 1 フランジ付 DR20T1BC02-AZAKR-F
DR20T1B02-AZAKL-F DR20T1BC02-AZAKL-F
146,300円 148,500円
DR20T1B02-AZAKD-P DR20T1BC02-AZAKD-P
フート付 DR20T1B02-AZAKR-P フート付 DR20T1BC02-AZAKR-P
DR20T1B02-AZAKL-P DR20T1BC02-AZAKL-P
# 取付角寸法28mm # 取付角寸法28mm
転造ボールねじ 転造ボールねじ カバー付
リード 取付
[mm] プレート 品名 定価 リード 取付
[ 品名 定
mm] プレート 価
DR28T1A03-AZAKD DR28T1AC03-AZAKD
なし DR28T1A03-AZAKR 113,500円 なし DR28T1AC03-AZAKR 115,700円
DR28T1A03-AZAKL DR28T1AC03-AZAKL
DR28T1A03-AZAKD-F DR28T1AC03-AZAKD-F
1 フランジ付 DR28T1A03-AZAKR-F 1 フランジ付 DR28T1AC03-AZAKR-F
DR28T1A03-AZAKL-F DR28T1AC03-AZAKL-F
117,900円 120,100円
DR28T1A03-AZAKD-P DR28T1AC03-AZAKD-P
フート付 DR28T1A03-AZAKR-P フート付 DR28T1AC03-AZAKR-P
DR28T1A03-AZAKL-P DR28T1AC03-AZAKL-P
# 取付角寸法28mm # 取付角寸法28mm
精密ボールねじ 精密ボールねじ カバー付
リード 取付 リード 取付
[mm] プレート 品名 定価 [ 品名 定価
mm] プレート
DR28T1B03-AZAKD DR28T1BC03-AZAKD
なし DR28T1B03-AZAKR 132,200円 なし DR28T1BC03-AZAKR 134,400円
DR28T1B03-AZAKL DR28T1BC03-AZAKL
DR28T1B03-AZAKD-F DR28T1BC03-AZAKD-F
1 フランジ付 DR28T1B03-AZAKR-F 1 フランジ付 DR28T1BC03-AZAKR-F
DR28T1B03-AZAKL-F DR28T1BC03-AZAKL-F
136,600円 138,800円
DR28T1B03-AZAKD-P DR28T1BC03-AZAKD-P
フート付 DR28T1B03-AZAKR-P フート付 DR28T1BC03-AZAKR-P
DR28T1B03-AZAKL-P DR28T1BC03-AZAKL-P
DR28T2.5B03-AZAKD DR28T2.5BC03-AZAKD
なし DR28T2.5B03-AZAKR 132,200円 なし DR28T2.5BC03-AZAKR 134,400円
DR28T2.5B03-AZAKL DR28T2.5BC03-AZAKL
DR28T2.5B03-AZAKD-F DR28T2.5BC03-AZAKD-F
2.5 フランジ付 DR28T2.5B03-AZAKR-F 2.5 フランジ付 DR28T2.5BC03-AZAKR-F
DR28T2.5B03-AZAKL-F DR28T2.5BC03-AZAKL-F
136,600円 138,800円
DR28T2.5B03-AZAKD-P DR28T2.5BC03-AZAKD-P
フート付 DR28T2.5B03-AZAKR-P フート付 DR28T2.5BC03-AZAKR-P
DR28T2.5B03-AZAKL-P DR28T2.5BC03-AZAKL-P
18
Page19
◇ ロッドタイプ
# 取付角寸法 # 取付角寸法 DR
20mm 20mm シリーズ
精密ボールねじ 精密ボールねじ カバー付
リード 取付
[ 定 リード 取付
[ 定
mm] プレート 品名 価
mm] プレート 品名 価 システム構成
品名の見方
DR20R1B02-AZAKU DR20R1BC02-AZAKU
DR20R1B02-AZAKD DR20R1BC02-AZAKD
1 なし 116,600円 1 なし 118,800円
DR20R1B02-AZAKR DR20R1BC02-AZAKR 種類と価格
DR20R1B02-AZAKL DR20R1BC02-AZAKL
仕様・特性
# 取付角寸法28mm # 取付角寸法28mm
転造ボールねじ 転造ボールねじ カバー付 外形図
リード 取付 リード 取付
[mm] プレート 品名 定価 [ 品 定
mm] プレート 名 価
DR28R1A03-AZAKU DR28R1AC03-AZAKU DRS2
DR28R1A03-AZAKD DR28R1AC03-AZAKD
なし 90,400円 なし 92,600円 シリーズ
DR28R1A03-AZAKR DR28R1AC03-AZAKR
DR28R1A03-AZAKL DR28R1AC03-AZAKL
1 1 システム
DR28R1A03-AZAKU-P DR28R1AC03-AZAKU-P 構成
DR28R1A03-AZAKD-P DR28R1AC03-AZAKD-P
フート付 94,800円 フート付 97,000円
DR28R1A03-AZAKR-P DR28R1AC03-AZAKR-P
品名の見方
DR28R1A03-AZAKL-P DR28R1AC03-AZAKL-P 種類と価格
仕様・特性
# 取付角寸法28mm # 取付角寸法28mm
精密ボールねじ 精密ボールねじ カバー付
リード 取付 リード 取付
[ 品名 価 外形図
[mm] プレート 品名 定価
mm] プレート 定
DR28R1B03-AZAKU DR28R1BC03-AZAKU
DR28R1B03-AZAKD DR28R1BC03-AZAKD AZシリーズ
なし 109,100円 なし 111,300円
DR28R1B03-AZAKR DR28R1BC03-AZAKR ドライバ /
接続ケーブル
DR28R1B03-AZAKL DR28R1BC03-AZAKL
1 1
DR28R1B03-AZAKU-P DR28R1BC03-AZAKU-P
DR28R1B03-AZAKD-P DR28R1BC03-AZAKD-P 周辺機器
フート付 113,500円 フート付 115,700円
DR28R1B03-AZAKR-P DR28R1BC03-AZAKR-P
DR28R1B03-AZAKL-P DR28R1BC03-AZAKL-P
DR28R2.5B03-AZAKU DR28R2.5BC03-AZAKU
DR28R2.5B03-AZAKD DR28R2.5BC03-AZAKD
なし 109,100円 なし 111,300円
DR28R2.5B03-AZAKR DR28R2.5BC03-AZAKR
DR28R2.5B03-AZAKL DR28R2.5BC03-AZAKL
2.5 2.5
DR28R2.5B03-AZAKU-P DR28R2.5BC03-AZAKU-P
DR28R2.5B03-AZAKD-P DR28R2.5BC03-AZAKD-P
フート付 113,500円 フート付 115,700円
DR28R2.5B03-AZAKR-P DR28R2.5BC03-AZAKR-P
DR28R2.5B03-AZAKL-P DR28R2.5BC03-AZAKL-P
● ドライバ
お客様のお使いになる上位システムに合わせて、お選びいただけるドライバを各種ご用意しています。
➜48ページをご覧ください。
● 接続ケーブル /可動接続ケーブル
ケーブルが屈曲される場合には、可動接続ケーブルをお使いください。
➜48ページをご覧ください。
ご注意
● モーターから出ているモーター/エンコーダケーブルは、ドライバに直接接続できません。ドライバに接続する場合は、接続ケーブルをお使いください。
19
Page20
仕様表の見方
"コンパクト電動シリンダの場合
アクチュエータ ボールねじ DR28T2.5B03-AZAK □- ■
品名 ボールねじ カバー付 DR28T2.5BC03-AZAK □- ■
① リード mm 2.5
ボールねじ種類 精密
② 繰り返し ①先端部 mm ±0.003
位置決め精度 ②上部 mm ±0.005
③ ロストモーション mm 0.02以下
④ 最小移動量 mm 0.001
静的許容モーメント N·m
⑤ 許容モーメント MP:0.30 MY:0.24 MR:1.5
動的許容モーメント N·m
水平 kg 4
⑥ 可搬質量
垂直 kg 2
⑦ 推力 N 20
⑧ 押し当て力 N 50
⑨ 保持力 N 20
⑩ ストローク mm 30
⑪ 最高速度 mm/s 100
⑫ 最大加速度 m/s2 0.5
①リード ⑥可搬質量 図A
モーターが1回転することにより、ボールねじが直線方向に進 # 水平方向(図A)
む距離です。 コンパクト電動シリンダを水平方向で使用
する場合、仕様の運転性能で動かすことの
②繰り返し位置決め精度 できる最大質量です。
同じ位置に同じ方向から繰り返し位置決めをおこなったときに、 # 垂直方向(図B) 図B
どれだけの誤差が生じるかを表した値です。 コンパクト電動シリンダを垂直方向で使用
(精度は一定温度、一定負荷での値です。) する場合、仕様の運転性能で動かすことの
できる最大質量です。
①は先端位置、②はリニアガイド上での
繰り返し位置決め精度となります。
その他、区別のないものは共通となります。
③ロストモーション ⑦推力
同じ位置に、異なる方向から位置決めをおこなったときに、ど 等速運転時、負荷を押し進められる最大の力です。
れだけの誤差が生じるかを表した値です。 ⑧押し当て力
(精度は一定温度、一定負荷での値です。) 押し当て運転中に、負荷に押し当たったときの最大の加圧力
④最小移動量 です。
出荷時に設定されている1stepあたりの移動量です。 ⑨保持力
⑤許容モーメント 通電時、モーター停止時の保持力の最大値です。
コンパクト電動シリンダのガイド中心よりずれた位置にワーク ⑩ストローク
をおいたとき、ガイドを回転させようとする力がはたらきます。 負荷を搬送、押し引きできる最大の距離です。
このときのガイドにかけられる最大の力をいいます。
動的許容モーメントは、動作中に許容できるモーメントのこと ⑪最高速度
です。 可搬質量を搬送できる最高の速度です。
静的許容モーメントは、停止中に許容できるモーメントのこと ⑫最大加速度
です。 可搬質量を搬送できる最大の加速度です。
水平方向
MP MY MR
支点 支点
支点
垂直方向
MP MY
支点 支点
20