




ショートストロークの直線動作と 高精度位置決めを実現。 コンパクト電動シリンダ DRLⅡシリーズ
ステッピングモーターとボールねじを一体化し、直線動作を実現した製品です。 カップリング等の機構部品の削減による装置の小型化と高精度位置決めで装置の性能向上に貢献します。
ドライバはシステム構成の自由度が高く、高機能なFLEX対応位置決め機能内蔵タイプをご用意。
(FLEXとは、I/O 制御、Modbus(RTU)制御、
ネットワークコンバータ経由での
FAネットワーク制御に対応した製品の総称です。
かんたん接続、かんたん制御を可能にし、
システム構築のトータルリードタイム短縮を実現します)
◆詳細はカタログをダウンロードしご覧いただくか、お気軽にお問い合わせ下さい。
このカタログについて
| ドキュメント名 | コンパクト電動シリンダ DRLIIシリーズ パルス列入力タイプ/RS-485通信タイプ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 3Mb |
| 登録カテゴリ | |
| 取り扱い企業 | オリエンタルモーター株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
コンパクト電動シリンダ
DRLⅡシリーズ
CVDシリーズ
パルス列入力タイプ/RS-485通信タイプ
Page2
コンパクト電動シリンダ
DRL シリーズ
パルス列入力タイプ/RS-485通信タイプドライバ
CVDシリーズ
ショートストロークの直線動作、
ピタッ!と高精度位置決めのDRL シリーズの誕生です。
ステッピングモーターとボールねじを一体化し、直線動作を実現した製品です。
カップリング等の機構部品削減による装置の小型化と
高精度位置決めで装置の性能向上に貢献します。
繰り返し位置決め精度 ±0.003mm
最大推力 300N
最長ストローク 100mm
Page3
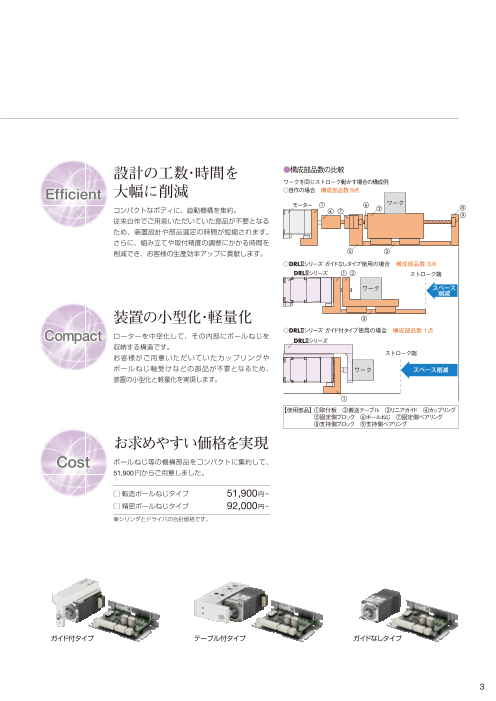
設計の工数・時間を ●構成部品数の比較
ワークを同じストローク動かす場合の構成例
Efficient 大幅に削減 ◇自作の場合 構成部品数 9点
モーター ① ⑥ ワーク
コンパクトなボディに、直動機構を集約。 ④ ⑦ ② ⑧
⑨
従来自作でご用意いただいていた部品が不要となる
ため、装置設計や部品選定の時間が短縮されます。
さらに、組み立てや取付精度の調整にかかる時間を
削減でき、お客様の生産効率アップに貢献します。 ⑤ ③
◇DRLⅡシリーズ ガイドなしタイプ使用の場合 構成部品数 3点
DRLⅡシリーズ ① ② ストローク端
ワーク スペース
削減
装置の小型化・軽量化 ③
Compact ◇DRLⅡシリーズ ガイド付タイプ使用の場合 構成部品数 1点
ローターを中空化して、その内部にボールねじを
DRLⅡシリーズ
収納する構造です。
DRLⅡシリーズ ストローク端
お客様がご用意いただいていたカップリングや
ボールねじ軸受けなどの部品が不要となるため、 ワーク スペース削減
装置の小型化と軽量化を実現します。
①
【 使 用 部 品 】①取付板 ②搬送テーブル ③リニアガイド ④カップリング
⑤固定側ブロック ⑥ボールねじ ⑦固定側ベアリング
⑧支持側ブロック ⑨支持側ベアリング
お求めやすい価格を実現
Cost ボールねじ等の機構部品をコンパクトに集約して、
51,900円からご用意しました。
□ 転造ボールねじタイプ 51,900円~
□ 精密ボールねじタイプ 92,000円~
●シリンダとドライバの合計価格です。
ガイド付タイプ テーブル付タイプ ガイドなしタイプ
3
Page4
コンパクト電動シリンダの特徴
高精度位置決め
中空ローターにボールねじナットを結合。
カップリング剛性等の部品の組み合わせによるバック
ラッシの影響が少なくなり、精度の高い位置決めが
実現可能となりました。
ボールねじ軸
中空ローター
ボールねじナット ボールねじナットと中空ローターを直結
【繰り返し位置決め精度】
精密ボールねじ:±0.003mm 転造ボールねじ:±0.01mm
ピタッ と止まる
ステッピングモーターを採用
DRL シリーズはステッピングモーターを使用。
ステッピングモーターなので1ステップ送りの位置
決め精度は高く、前進、後退を正確におこなうことが
できます。
また、停止時に軸が微小に動くハンチングと呼ばれる
現象を起こすこともないため、停止位置保持が確実に
おこなえます。
内部構造について
ステーター
中空ローター部にボールねじ軸を収納 DRL シリーズはローター部を中空化してボールねじを内部に収納
短い全長で最大限のストロークを確保 できる構造です。中空ローターが回転することによりボールねじ
ナットが回転し、ボールねじ先端に回り止め機構✽を設けることで
ボールねじ軸は直線動作します。
ボールねじの種類は、微小送りや高精度位置決めの精密ボールねじ
ボールねじ軸 と、一般的な位置決め用として信頼性のある転造ボールねじの2種
類があります。
ボールねじ軸は中空ローター内部に収納されるため、短い全長で最大
限のストロークを確保しています。
中空ローター さらに、ボールねじナットの外周部には直線動作時に発生する
大口径スラスト軸受け機構 大きなスラスト荷重を直接受けるための、大口径のベアリングを
ボールねじナット 配置しています。
ボールねじナットと中空ローターを直結
*ガイド付タイプ、テーブル付タイプは不要です。
4
Page5
用途に応じて選べる3タイプ
タイプ ガイド付タイプ テーブル付タイプ ガイドなしタイプ
外観
シリンダに負荷を固定できるガイドを シリンダに負荷を固定できるガイドを お客様の装置に直接組み込んでの使用
付けた製品です。 付けた製品です。 や、シリンダの外部に負荷搬送用のガ
負荷の直接取り付けが容易です。 負荷の取り付けおよび本体の取り付け イドを設けて使用する製品です。
が容易で、可動部の高さを抑えた搬送
が可能です。
ストローク[mm] 25~50 25、30 25~100
推力[N] 15~300 15、30 15~300
価格✽ 68,400円~ 84,700円~ 51,900円~
[カメラのフォーカス駆動] [分光器] [X-Yテーブル]
※垂直方向での駆動には
電磁ブレーキ付を
代表的な用途例 お使いください。
このほかの用途例は
8ページをご覧ください。
✽シリンダとドライバの合計価格です。
■付加機能
各タイプには、付加機能として「調整ノブ付」「電磁ブレーキ付」をご用意しています。
調整ノブ付 電磁ブレーキ付
ガイドなしタイプのDRLM28、
DRLM42、DRLM60にストロークの
長い製品をラインアップしています。
用途例 電源OFF時のXYステージ 用途例 電源OFF時のCCDカメラ
位置微調整、移動 Z軸方向の位置保持
電源OFF時に手動で位置の調整ができます。 電源OFF時に停止位置を保持します。
装置のメンテナンス時などに便利です。 垂直方向に取り付けてもワークの落下等の
心配がなく、安心してお使いいただけます。
5
Page6
ドライバの特徴
■種類と特徴
CVDシリーズのドライバをご用意しています。
●フルタイムマイクロステップによる低振動
フルデジタル制御のフルタイムマイクロステップ駆動ドライバにより
振動レベルを大幅に改善し、全速度域で低振動、低騒音を実現。
●業界最小クラスの高性能ドライバ
●省スペース化に貢献する小型・軽量ドライバ
●ドライバ異常を早期に発見できる保護機能
●なめらかな運転が可能なスムースドライブ機能
●デジタルスイッチで運転電流設定可能
52.5
mm
質量 20g~70g
(ドライバの種類で異なります。) 24.5
mm
85mm
●システムや用途に合わせて選べる豊富なラインアップ
◇パルス列入力タイプ
パルス列入力で簡単に同期運転がおこなえます。
取付プレート付 取付プレート付
ライトアングル
●取付プレートなしのドライバもご用意しています。詳細については、お近くの支店、営業所またはお客様ご相談センターにお問い合わせください。
◇RS-485通信タイプ
RS-485通信 (Modbus RTU)による運転制御、パラメータの設定ができます。
パルス発振器不要で、ドライバに設定した運転データを上位制御機器から選択・実行することができます。
取付プレート付 取付プレート付
ライトアングル
6
Page7
コンパクト電動シリンダ セレクション
■ガイド付タイプ
DRLM20G DRLM28G DRLM42G DRLM60G
精度 速度[ ] 推力[ ] 可搬質量 動的許容
取付角 ボール リード スト mm/s N
繰り返し ロスト [kg] モーメント[N・m]
寸法 ねじ ローク
[ ] 種類 位置決め精度 モーション [mm] 10 20 30 40 100 110 120 50 100 150 200 250 300
mm [mm]
[ ] [ ] 水平 垂直 MP MY MR
mm mm
DRLM20G □20 精密 ±0.003[±0.01]✽ 0.02以下 1 25 ~20 ~15 0.5 1 0.1 0.05 0.15
転造 ±0.01 0.05以下
DRLM28G □28 1 30 ~40✽ ~30 1 1.5 0.13 0.07 0.3
精密 ±0.003[±0.01]✽ 0.02以下
転造 ±0.01 0.05以下
2 40 ~30✽ ~100 2 5
DRLM42G □42 精密 ±0.003[±0.01]✽ 0.02以下 0.5 0.25 0.8
転造 ±0.01 0.05以下 8 40 ~120 ~30 2 3
転造 ±0.01 0.05以下
DRLM60G □60 4 50 ~40✽ ~300 3 15 0.6 0.35 2.2
精密 ±0.003[±0.01]✽ 0.02以下
✽条件によって仕様は異なります。詳細は、各製品の仕様をご確認ください。
■テーブル付タイプ
DRLM20V DRLM28V
精度 可搬質量 動的許容
取付角 ボール リード スト 速度[mm/s] 推力[N]
繰り返し ロスト [kg] モーメント[N・m]
寸法 ねじ ローク
[ ] 種類 位置決め精度 モーション [mm][ ] 10 20 30 40 100 110 120 50 100 150 200 250 300
mm mm
[ ] [ ] 水平 垂直 MP MY MR
mm mm
DRLM20V □20 精密 ±0.003 0.02以下 1 25 ~20 ~15 1.5 1.5 0.4 0.4 0.8
転造 ±0.01 0.05以下
DRLM28V □28 1 30 ~40 ~30 3 3 0.7 0.7 1.5
精密 ±0.003 0.02以下
■ガイドなしタイプ
DRLM20 DRLM28 DRLM42 DRLM60
精度
取付角 ボール スト 速度[mm/s] 推力[ ] 可搬質量
N
寸法 ねじ 繰り返し ロスト リード [kg]
ローク
[ ] 種類 位置決め精度 モーション [mm] [ ] 10 20 30 40 100 110 120 50 100 150 200 250 300
mm mm
[ 水平 垂直
mm] [mm]
DRLM20 □20 精密 ±0.003 0.02以下 1 25 ~20 ~15 − 1.5
転造 ±0.01 0.05以下
DRLM28 □28 1 30、60 ~40✽ ~30 − 3
精密 ±0.003 0.02以下
転造 ±0.01 0.05以下
2 40、100 ~30✽ ~100 − 10
DRLM42 □42 精密 ±0.003 0.02以下
転造 ±0.01 0.05以下 8 40、100 ~120 ~30 − 3
転造 ±0.01 0.05以下
DRLM60 □60 4 50、100 ~40✽ ~300 − 30
精密 ±0.003 0.02以下
7
Page8
■用途例
基板のセンタリング CCDカメラのフォーカス XYステージの駆動
ピンリフタ ミラーの位置調整 プローブの上下駆動
ディスペンサの駆動 ポンプの駆動 マイクロプレート用自動分注装置
センサの微調整 流量調整バルブの微調整 ノズルの微調整
8
Page9
仕様表の見方
■コンパクト電動シリンダの場合
アクチュエータ品名 DRLM20V-02B1P □-K DRLM28V-03A1P □-K DRLM28V-03B1P □-K
RS-485通信 CVD5BR-KR
ドライバ品名
パルス列入力 CVD503BR-K CVD507BR-K
① リード mm 1
ボールねじ種類 精密 転造 精密
② 繰り返し位置決め精度 mm ±0.003 ±0.01 ±0.003
③ ロストモーション mm 0.02以下 0.05以下 0.02以下
④ 走り並行度 mm 0.03
⑤ 最小移動量 mm 0.002
静的許容モーメント N·m MP:0.4 MY:0.4 MR:0.8 MP:0.7 MY:0.7 MR:1.5
⑥ 許容モーメント
動的許容モーメント N·m MP:0.4 MY:0.4 MR:0.8 MP:0.7 MY:0.7 MR:1.5
水平 kg 1.5 3
⑦ 可搬質量
垂直 kg 1.5 3
⑧ 推力 N 15 30
⑨ 保持力 N 15 30
⑩ ストローク mm 25 30
⑪ 最高速度 mm/s 20 40
⑫ 最大加速度 m/s2 0.2
定格電流 A/相 0.35 0.75
巻線抵抗 Ω/相 3.5±10% 1.1±10%
①リード ● テーブル付タイプ
モーターが1回転することにより、ボールねじが直線方向に進 MP MY MR
む距離です。
支点
支点 支点
②繰り返し位置決め精度
同じ位置に同じ方向から繰り返し位置決めをおこなったときに、
どれだけの誤差が生じるかを表した値です。(精度は一定温度、
一定負荷での値です。) ⑦可搬質量
● 水平方向(図A)
シリンダを水平方向で使用する場合、仕様 図A
の運転性能で動かすことのできる最大質量
です。
①は先端位置、②はリニアガイド上での繰り返し位置
決め精度となります。
その他、区別のないものは共通となります。
● 垂直方向(図B)
③ロストモーション シリンダを垂直方向で使用する場合、仕様 図B
同じ位置に、異なる方向から位置決めをおこなったときに、ど の運転性能で動かすことのできる最大質量
れだけの誤差が生じるかを表した値です。(精度は一定温度、一 です。
定負荷での値です。)
④走り平行度
シリンダ取付面からテーブル上面までの高さ方向の振れ幅です。
⑤最小移動量 ⑧推力
出荷時に設定されている1stepあたりの移動量です。 等速運転時、負荷を押し進められる最大の力です。
⑥許容モーメント ⑨保持力
シリンダのガイド中心よりずれた位置にワークをおいたとき、 通電時、モーター停止時の保持力の最大値です。
ガイドを回転させようとする力がはたらきます。このときのガ
イドにかけられる最大の力です。 ⑩ストローク
動的許容モーメントは、動作中に許容できるモーメントのこと 負荷を搬送、押し引きできる最大の距離です。
です。
静的許容モーメントは、停止中に許容できるモーメントのこと ⑪最高速度
です。 可搬質量を搬送できる最高の速度です。
● ガイド付タイプ
MP MY MR ⑫最大加速度
支点 支点 可搬質量を搬送できる最大の加速度です。
支点
9
仕様表の見方 品名の見方 システム構成 シリンダ仕様・特性 ドライバ仕様種類と価格 外形図 ケーブル 周辺機器
選定計算について
一般仕様 取付について
Page10
■品名の見方
● コンパクト電動シリンダ
DRLM 20 G - 02 B 1 P N - K ① シリーズ名 DRLM:DRL シリーズ
取付角寸法 20:20mm
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ 28
② :28mm
42:42mm
60:60mm
形状 なし:ガイドなしタイプ
③ G:ガイド付タイプ
V:テーブル付タイプ
ストローク 02:25mm
03:30mm
④ 04:40mm
05:50mm
10:100mm
⑤ ボールねじ種類 A:転造ボールねじ
B:精密ボールねじ
リード 1:1mm
2
⑥ :2mm
4:4mm
8:8mm
⑦ モーター種類 P:標準
M:高分解能
付加機能 なし:付加機能なし
⑧ N:調整ノブ付
M:電磁ブレーキ付
⑨ モーター仕様 K:DC電源入力仕様
● ドライバ
◇ パルス列入力タイプ
CVD 5 03 B R - K ① シリーズ名 CVD:CVDシリーズ
② 5:5相
③ 定格電流
① ② ③ ④ ⑤ ⑥
④ ドライバ形状 B:取付プレート付✽
⑤ コネクタ形状 R:ライトアングル
⑥ 電源入力 K:DC電源
✽ 取付プレートなしのタイプもご用意しています。
詳細については、お近くの支店・営業所までお問い合わせください。
◇ RS-485通信タイプ
CVD 5 B R - K R ① シリーズ名 CVD:CVDシリーズ
② 5:5相
③ ドライバ形状 B:取付プレート付
① ② ③ ④ ⑤ ⑥
④ コネクタ形状 R:ライトアングル
⑤ 電源入力 K:DC電源
⑥ 種類 R:RS-485通信タイプ
10
Page11
■種類と価格
● コンパクト電動シリンダ
◇ ガイド付タイプ
● 転造ボールねじ
取付角寸法 リード 付加 モーター
[mm] [mm] 機能 種類 品名 定価
なし DRLM28G-03A1P-K 62,400円
28 1
調整ノブ付 DRLM28G-03A1PN-K 65,700円
2 DRLM42G-04A2P-K 53,600円
なし
8 DRLM42G-04A8P-K 63,500円
2 DRLM42G-04A2PN-K 57,200円
42 調整ノブ付
8 標準 DRLM42G-04A8PN-K 67,100円
2 DRLM42G-04A2PM-K 73,400円
電磁ブレーキ付
8 DRLM42G-04A8PM-K 83,300円
なし DRLM60G-05A4P-K 67,900円
60 4 調整ノブ付 DRLM60G-05A4PN-K 71,800円
電磁ブレーキ付 DRLM60G-05A4PM-K 89,900円
● 精密ボールねじ
取付角寸法 リード 付加 モーター
[mm] [mm] 機能 種類 品名 定価
なし DRLM20G-02B1P-K 108,900円
20 標準
調整ノブ付 DRLM20G-02B1PN-K 112,200円
標準 DRLM28G-03B1P-K 99,200円
1 なし
高分解能 DRLM28G-03B1M-K 104,700円
28
標準 DRLM28G-03B1PN-K 102,500円
調整ノブ付
高分解能 DRLM28G-03B1MN-K 108,000円
標準 DRLM42G-04B2P-K 93,700円
なし
高分解能 DRLM42G-04B2M-K 99,200円
標準 DRLM42G-04B2PN-K 97,200円
42 2 調整ノブ付
高分解能 DRLM42G-04B2MN-K 102,700円
標準 DRLM42G-04B2PM-K 113,500円
電磁ブレーキ付
高分解能 DRLM42G-04B2MM-K 119,000円
標準 DRLM60G-05B4P-K 105,800円
なし
高分解能 DRLM60G-05B4M-K 111,300円
標準 DRLM60G-05B4PN-K 109,600円
60 4 調整ノブ付
高分解能 DRLM60G-05B4MN-K 115,100円
標準 DRLM60G-05B4PM-K 127,800円
電磁ブレーキ付
高分解能 DRLM60G-05B4MM-K 133,300円
◇ テーブル付タイプ
● 転造ボールねじ
取付角寸法 リード 付加 モーター 品名 定価
[mm] [mm] 機能 種類
なし DRLM28V-03A1P-K 69,900円
28 1 標準
調整ノブ付 DRLM28V-03A1PN-K 73,200円
● 精密ボールねじ
取付角寸法 リード 付加 モーター 品名 定価
[mm] [mm] 機能 種類
なし DRLM20V-02B1P-K 116,600円
20
調整ノブ付 DRLM20V-02B1PN-K 119,900円
1 標準
なし DRLM28V-03B1P-K 106,700円
28
調整ノブ付 DRLM28V-03B1PN-K 110,000円
11
仕様表の見方 品名の見方 ドライバ仕様種類と価格 システム構成 シリンダ仕様・特性 外形図 ケーブル 周辺機器
選定計算について
一般仕様 取付について
Page12
◇ ガイドなしタイプ
● 転造ボールねじ
取付角寸法 リード 付加 モーター 品名 定価
[mm] [mm] 機能 種類
DRLM28-03A1P-K 47,000円
なし
28 1 DRLM28-06A1P-K 50,300円
調整ノブ付 DRLM28-03A1PN-K 50,300円
DRLM42-04A2P-K 37,100円
2
DRLM42-10A2P-K 40,400円
なし
DRLM42-04A8P-K 47,000円
8
DRLM42-10A8P-K 50,300円
42
2 標準 DRLM42-04A2PN-K 40,700円
調整ノブ付
8 DRLM42-04A8PN-K 50,600円
2 DRLM42-04A2PM-K 56,900円
電磁ブレーキ付
8 DRLM42-04A8PM-K 66,800円
DRLM60-05A4P-K 50,300円
なし
DRLM60-10A4P-K 53,600円
60 4
調整ノブ付 DRLM60-05A4PN-K 54,200円
電磁ブレーキ付 DRLM60-05A4PM-K 72,300円
● 精密ボールねじ
取付角寸法 リード 付加 モーター
[mm] [mm] 機能 種類 品名 定価
なし DRLM20-02B1P-K 91,300円
20 標準
調整ノブ付 DRLM20-02B1PN-K 94,600円
DRLM28-03B1P-K 83,800円
標準
1 なし DRLM28-06B1P-K 94,800円
28 高分解能 DRLM28-03B1M-K 89,300円
標準 DRLM28-03B1PN-K 87,100円
調整ノブ付
高分解能 DRLM28-03B1MN-K 92,600円
DRLM42-04B2P-K 77,200円
標準
なし DRLM42-10B2P-K 88,200円
高分解能 DRLM42-04B2M-K 82,700円
42 2 標準 DRLM42-04B2PN-K 80,700円
調整ノブ付
高分解能 DRLM42-04B2MN-K 86,200円
標準 DRLM42-04B2PM-K 97,000円
電磁ブレーキ付
高分解能 DRLM42-04B2MM-K 102,500円
DRLM60-05B4P-K 90,400円
標準
なし DRLM60-10B4P-K 101,400円
高分解能 DRLM60-05B4M-K 95,900円
60 4 標準 DRLM60-05B4PN-K 94,200円
調整ノブ付
高分解能 DRLM60-05B4MN-K 99,700円
標準 DRLM60-05B4PM-K 112,400円
電磁ブレーキ付
高分解能 DRLM60-05B4MM-K 117,900円
12
Page13
● ドライバ
◇ パルス列入力タイプ ◇ RS-485通信タイプ
● 取付プレート付 ライトアングル ● 取付プレート付ライトアングル
品名 定価 品名 定価
CVD503BR-K CVD5BR-KR 19,200円
CVD507BR-K 14,800円
CVD514BR-K
● 取付プレート付 ● 取付プレート付
品名 定価 品名 定価
CVD503B-K CVD5B-KR 19,200円
CVD507B-K 14,800円
CVD514B-K
■付属品
● コンパクト電動シリンダ
付属品
タイプ バリスタ 接続ケーブル 取扱説明書
ガイド付タイプ 1個 1本
ガイドなしタイプ (電磁ブレーキ付のみ) (コネクタ接続方式の 1式
テーブル付タイプ − シリンダのみ)
● ドライバ
付属品
タイプ ドライバ接続用コネクタ 取扱説明書
CN1用(1個)
パルス列入力タイプ CN2用(1個)
CN3用(1個) 1式
RS-485通信タイプ −
CVDシリーズドライバの詳細内容については、CVDシリー
ズパンフレット(V-201)とPKPシリーズ製品カタログ(V-185)
に掲載しています。
V-201 CVDシリーズパンフレット V-185 PKPシリーズカタログ
ステッピングモーター
PKPシリーズ
ラインアップ追加
■特徴 ■接続と運転
■接続図
■周辺機器
13
仕様表の見方 品名の見方 ドライバ仕様 選定計算について種類と価格 システム構成 シリンダ仕様・特性 外形図 ケーブル 周辺機器一般仕様 取付について
Page14
■システム構成
● コンパクト電動シリンダとCVDシリーズパルス列入力タイプのドライバを組み合わせた場合
上位制御機器(パルス発振機能搭載)を使用したシステム構成例です。コンパクト電動シリンダ、ドライバ、接続ケーブルは別手配です。
必ずご購入ください
必要に応じてご購入ください お客様にて、 入出力信号用ケーブル
ご用意ください。 コネクタ付タイプ
➜ 44ページ
上位制御機器 ドライバ
パルス列入力タイプ
コンパクト電動シリンダ(コネクタ接続方式)
接続ケーブル
➜ 42ページ
コンパクト電動シリンダ(リード線タイプ)
接続ケーブル 端末処理なし 接続ケーブルドライバ側
➜ 44ページ ➜ 43ページ
お客様にて、
ご用意ください。 DC電源用ケーブル
周辺機器 ➜ 45ページ
DC24V
電源
取付プレート ドライバカバー
➜ 48ページ ➜ 49ページ
●システム構成価格例
ケーブル
コンパクト電動シリンダ ドライバ 接続ケーブル( m) 入出力信号用ケーブル
1 コネクタ付きタイプ( m) DC電源用ケーブル(1m)
1
DRLM28G-03A1P-K CVD507BR-K CCM010V5AAF CC12D010-2 CC02D010-2
62,400円 14,800円 2,500円 2,700円 1,500円
● 上記システム構成は一例です。他の組み合わせもございます。
● コネクタ接続方式のシリンダには、片側コネクタ圧着済みの接続ケーブル(0.6m)を付属しています。
● ドライバカバーは、パルス列入力タイプ取付プレート付ライトアングルのドライバに使用できます。
14
Page15
● コンパクト電動シリンダとCVDシリーズRS-485通信タイプのドライバを組み合わせた場合
RS-485通信で使用した3軸のシステム構成例です。コンパクト電動シリンダ、ドライバ、接続ケーブルは、別手配です。
必ずご購入ください
必要に応じてご購入ください
お客様にて、 ケーブルセット(電源ケーブル/入出力信号ケーブル)➜ 47ページ
ご用意ください。
電源ケーブル
DC24V
電源
入出力信号ケーブル
上位
制御機器 RS-485通信用ケーブル(3m)
上位システム接続用➜ 47ページ
サポートソフト
MEXE02
RS-485通信用ケーブル
(0.15m)➜ 47ページ
ドライバ間接続用
●サポートソフトMEXE02は当社WEBサイト
からダウンロードいただけます。 USBケーブル お客様にてご用意ください
コンパクト電動シリンダ(コネクタ接続方式)
ドライバ
接続ケーブル RS-485通信タイプ
➜ 42ページ
ご注意
ドライバには電源・モーター・入出力信号・RS-485通信を
接続するコネクタは付属していません。
別売のケーブルをお求め頂くか、お客様にてコネクタを
別途ご用意ください。コネクタの品番は39ページまたは、
取扱説明書にてご確認ください。
コンパクト電動シリンダ(リード線タイプ)
接続ケーブル 端末処理なし 接続ケーブルドライバ側
➜ 44ページ ➜ 43ページ
周辺機器
取付プレート
➜ 48ページ
●システム構成価格例
ケーブル
コンパクト電動シリンダ ドライバ 接続ケーブル( m) RS-485通信用
1 ケーブル( m) ケーブルセット(0.3m)
3
DRLM28G-03A1P-K CVD5BR-KR CCM010V5AAF CC030-RS LHS003CC
62,400円 19,200円 2,500円 2,200円 750円
◉ ◉ ○ ○ ○
● 上記システム構成は一例です。他の組み合わせもございます。
● コネクタ接続方式のシリンダには、片側コネクタ圧着済みの接続ケーブル(0.6m)を付属しています。
15
仕様表の見方 品名の見方種類と価格 システム構成
選定計算について
シリンダ仕様・特性 ドライバ仕様 ケーブル 周辺機器一般仕様 外形図 取付について
Page16
■コンパクト電動シリンダ
● ガイド付タイプ
◇ 取付角寸法 20mm、28mm
アクチュエータ品名 DRLM20G-02B1P □-K DRLM28G-03A1P □-K DRLM28G-03B1P □-K DRLM28G-03B1M □-K
RS-485通信 CVD5BR-KR
ドライバ品名
パルス列入力 CVD503BR-K CVD507BR-K
リード mm 1
ボールねじ種類 精密 転造 精密
繰り返し ①先端部 mm ±0.003 ±0.003
位置決め精度 ±0.01
②上部 mm ±0.01 ±0.01
ロストモーション mm 0.02以下 0.05以下 0.02以下
最小移動量 mm 0.002 0.001
静的許容モーメント N·m
許容モーメント✽ MP:0.1 MY:0.05 MR:0.15 MP:0.13 MY:0.07 MR:0.3
動的許容モーメント N·m
水平 kg 0.5 1
可搬質量
垂直 kg 1 1.5
推力 N 15 30
保持力 N 15 30
ストローク mm 25 30
最高速度 mm/s 20 40 24
最大加速度 m/s2 0.2
定格電流 A/相 0.35 0.75
巻線抵抗 Ω/相 3.5±10% 1.1±10% 0.9±10%
● 品名中の □には、付加機能を表すN(調整ノブ付)が入ります。付加機能なしの場合、記号は入りません。
✽ 負荷は推力以下にしてください。
ご注意
● シリンダ表面温度は90˚C以下でお使いください。精度は一定温度、一定負荷での値です。
● 周囲温度やモーターケーブルの長さにより最高速度が低下する場合があります。
◇ 取付角寸法 42mm
アクチュエータ品名 DRLM42G-04A2P □-K DRLM42G-04A8P □-K DRLM42G-04B2P □-K DRLM42G-04B2M □-K
RS-485通信 CVD5BR-KR
ドライバ品名
パルス列入力 CVD507BR-K
リード mm 2 8 2
ボールねじ種類 転造 精密
繰り返し ①先端部 mm ±0.003
位置決め精度 ±0.01
②上部 mm ±0.01
ロストモーション mm 0.05以下 0.02以下
最小移動量 mm 0.004 0.016 0.004 0.002
✽1 静的許容モーメント N·m
許容モーメント MP:0.5 MY:0.25 MR:0.8
動的許容モーメント N·m
水平 kg 2
可搬質量
垂直 kg 5 3 5
推力 N 100 30 100
保持力 N 100✽2 30✽2 100✽2
ストローク mm 40
最高速度 mm/s 30 120 30 15
最大加速度 m/s2 0.4 1 0.4 0.2
定格電流 A/相 0.75
巻線抵抗 Ω/相 2.2±10% 1.95±10%
● 品名中の □には、付加機能を表すN(調整ノブ付)またはM(電磁ブレーキ付)が入ります。付加機能なしの場合、記号は入りません。
✽ 1 負荷は推力以下にしてください。
✽ 2 電磁ブレーキ保持力は、保持力と同一の値です。
ご注意
● シリンダ表面温度は90˚C以下でお使いください。精度は一定温度、一定負荷での値です。
● 周囲温度やモーターケーブルの長さにより最高速度が低下する場合があります。
16
Page17
◇ 取付角寸法 60mm
アクチュエータ品名 DRLM60G-05A4P □-K DRLM60G-05B4P □-K DRLM60G-05B4M □-K
RS-485通信 CVD5BR-KR
ドライバ品名
パルス列入力 CVD514BR-K
リード mm 4
ボールねじ種類 転造 精密
繰り返し ①先端部 mm ±0.003
位置決め精度 ±0.01
②上部 mm ±0.01
ロストモーション mm 0.05以下 0.02以下
最小移動量 mm 0.008 0.004
✽1 静的許容モーメント N·m
許容モーメント MP:0.6 MY:0.35 MR:2.2
動的許容モーメント N·m
水平 kg 3
可搬質量
垂直 kg 15
推力 N 300
保持力 N 300✽2
ストローク mm 50
最高速度 mm/s 40 22
最大加速度 m/s2 0.26
定格電流 A/相 1.4
巻線抵抗 Ω/相 0.62±10% 0.9±10%
● 品名中の □には、付加機能を表すN(調整ノブ付)またはM(電磁ブレーキ付)が入ります。付加機能なしの場合、記号は入りません。
✽ 1 負荷は推力以下にしてください。
✽ 2 電磁ブレーキ保持力は、保持力と同一の値です。
ご注意
● シリンダ表面温度は90˚C以下でお使いください。精度は一定温度、一定負荷での値です。
● 周囲温度やモーターケーブルの長さにより最高速度が低下する場合があります。
● テーブル付タイプ
◇ 取付角寸法 20mm、28mm
アクチュエータ品名 DRLM20V-02B1P □-K DRLM28V-03A1P □-K DRLM28V-03B1P □-K
RS-485通信 CVD5BR-KR
ドライバ品名
パルス列入力 CVD503BR-K CVD507BR-K
リード mm 1
ボールねじ種類 精密 転造 精密
繰り返し位置決め精度 mm ±0.003 ±0.01 ±0.003
ロストモーション mm 0.02以下 0.05以下 0.02以下
走り平行度 mm 0.03
最小移動量 mm 0.002
静的許容モーメント N·m
許容モーメント✽ MP:0.4 MY:0.4 MR:0.8 MP:0.7 MY:0.7 MR:1.5
動的許容モーメント N·m
水平 kg 1.5 3
可搬質量
垂直 kg 1.5 3
推力 N 15 30
保持力 N 15 30
ストローク mm 25 30
最高速度 mm/s 20 40
最大加速度 m/s2 0.2
定格電流 A/相 0.35 0.75
巻線抵抗 Ω/相 3.5±10% 1.1±10%
● 品名中の □には、付加機能を表すN(調整ノブ付)が入ります。付加機能なしの場合、記号は入りません。
✽ 負荷は推力以下にしてください。
ご注意
● シリンダ表面温度は90˚C以下でお使いください。精度は一定温度、一定負荷での値です。
● 周囲温度やモーターケーブルの長さにより最高速度が低下する場合があります。
17
仕様表の見方 品名の見方 システム構成 ドライバ仕様 ケーブル 周辺機器 選定計算について種類と価格 シリンダ仕様・特性 一般仕様 外形図 取付について
Page18
● ガイドなしタイプ
◇ 取付角寸法 20mm、28mm
アクチュエータ品名 DRLM20-02B1P □-K DRLM28-03A1P □-K DRLM28-06A1P-K DRLM28-03B1P □-K DRLM28-06B1P-K DRLM28-03B1M □-K
RS-485通信 CVD5BR-KR
ドライバ品名
パルス列入力 CVD503BR-K CVD507BR-K
リード mm 1
ボールねじ種類 精密 転造 精密
繰り返し位置決め精度 mm ±0.003 ±0.01 ±0.003
ロストモーション mm 0.02以下 0.05以下 0.02以下
最小移動量 mm 0.002 0.001
水平 kg −
可搬質量
垂直 kg 1.5 3
推力 N 15 30
保持力 N 15 30
ストローク mm 25 30 60 30 60 30
最高速度 mm/s 20 40 24
最大加速度 m/s2 0.2
定格電流 A/相 0.35 0.75
巻線抵抗 Ω/相 3.5±10% 1.1±10% 0.9±10%
● 品名中の □には、付加機能を表すN(調整ノブ付)が入ります。付加機能なしの場合、記号は入りません。
ご注意
● シリンダ表面温度は90˚C以下でお使いください。精度は一定温度、一定負荷での値です。
● 周囲温度やモーターケーブルの長さにより最高速度が低下する場合があります。
◇ 取付角寸法 42mm
アクチュエータ品名 DRLM42-04A2P □-K DRLM42-10A2P-K DRLM42-04A8P □-K DRLM42-10A8P-K
RS-485通信 CVD5BR-KR
ドライバ品名
パルス列入力 CVD507BR-K
リード mm 2 8
ボールねじ種類 転造
繰り返し位置決め精度 mm ±0.01
ロストモーション mm 0.05以下
最小移動量 mm 0.004 0.016
水平 kg −
可搬質量
垂直 kg 10 3
推力 N 100 30
保持力 N 100✽ 30✽
ストローク mm 40 100 40 100
最高速度 mm/s 30 120
最大加速度 m/s2 0.4 1
定格電流 A/相 0.75
巻線抵抗 Ω/相 2.2±10%
● 品名中の □には、付加機能を表すN(調整ノブ付)またはM(電磁ブレーキ付)が入ります。付加機能なしの場合、記号は入りません。
✽ 電磁ブレーキ保持力は、保持力と同一の値です。
ご注意
● シリンダ表面温度は90˚C以下でお使いください。精度は一定温度、一定負荷での値です。
● 周囲温度やモーターケーブルの長さにより最高速度が低下する場合があります。
◇ 取付角寸法 42mm
アクチュエータ品名 DRLM42-04B2P □-K DRLM42-10B2P-K DRLM42-04B2M □-K
RS-485通信 CVD5BR-KR
ドライバ品名
パルス列入力 CVD507BR-K
リード mm 2
ボールねじ種類 精密
繰り返し位置決め精度 mm ±0.003
ロストモーション mm 0.02以下
最小移動量 mm 0.004 0.002
水平 kg −
可搬質量
垂直 kg 10
推力 N 100
保持力 N 100✽
ストローク mm 40 100 40
最高速度 mm/s 30 15
最大加速度 m/s2 0.4 0.2
定格電流 A/相 0.75
巻線抵抗 Ω/相 2.2±10% 1.95±10%
● 品名中の □には、付加機能を表すN(調整ノブ付)またはM(電磁ブレーキ付)が入ります。付加機能なしの場合、記号は入りません。
✽ 電磁ブレーキ保持力は、保持力と同一の値です。
ご注意
● シリンダ表面温度は90˚C以下でお使いください。精度は一定温度、一定負荷での値です。
● 周囲温度やモーターケーブルの長さにより最高速度が低下する場合があります。
18
Page19
◇ 取付角寸法 60mm
アクチュエータ品名 DRLM60-05A4P □-K DRLM60-10A4P-K DRLM60-05B4P □-K DRLM60-10B4P-K DRLM60-05B4M □-K
RS-485通信 CVD5BR-KR
ドライバ品名
パルス列入力 CVD514BR-K
リード mm 4
ボールねじ種類 転造 精密
繰り返し位置決め精度 mm ±0.01 ±0.003
ロストモーション mm 0.05以下 0.02以下
最小移動量 mm 0.008 0.004
水平 kg −
可搬質量
垂直 kg 30
推力 N 300
保持力 N 300✽
ストローク mm 50 100 50 100 50
最高速度 mm/s 40 22
最大加速度 m/s2 0.26
定格電流 A/相 1.4
巻線抵抗 Ω/相 0.62±10% 0.9±10%
● 品名中の □には、付加機能を表すN(調整ノブ付)またはM(電磁ブレーキ付)が入ります。付加機能なしの場合、記号は入りません。
✽ 電磁ブレーキ保持力は、保持力と同一の値です。
ご注意
● シリンダ表面温度は90˚C以下でお使いください。精度は一定温度、一定負荷での値です。
● 周囲温度やモーターケーブルの長さにより最高速度が低下する場合があります。
19
仕様表の見方 品名の見方 ドライバ仕様 選定計算について種類と価格 システム構成 シリンダ仕様・特性 外形図 ケーブル 周辺機器一般仕様 取付について
Page20
■位置決め距離-位置決め時間(目安)
DRLM20 DRLM28
1.6 2.0
1.4 1.8
1.6 標準モーター
1.2
1.4
1.0 1.2 高分解能モーター
0.8 1.0
0.6 0.8
0.6
0.4
0.4
0.2 0.2
0
0 5 10 15 20 25 0
0 10 20 30 40 50 60
位置決め距離 [mm] 位置決め距離 [mm]
DRLM42 DRLM60
4.0 3.0
3.5
標準モーター、リード 2mm 2.5 標準モーター
3.0 高分解能モーター
高分解能モーター、 2.0
2.5 リード 2mm
2.0 1.5
1.5
標準モーター、リード 8mm 1.0
1.0
0.5
0.5
0
0 10 20 30 40 50 60 70 80 90 100 0
0 10 20 30 40 50 60 70 80 90 100
位置決め距離 [mm] 位置決め距離 [mm]
● 起動速度は、次の値でご使用ください。
· DRLM20、DRLM28:0.2mm/s以下
· DRLM42(リード2mm):0.4mm/s以下
· DRLM42(リード8mm):1.6mm/s以下
· DRLM60:0.8mm/s以下
20
位置決め時間 [s] 位置決め時間 [s]
位置決め時間 [s] 位置決め時間 [s]