




大慣性の円板・アームなどを直接取り付けられる中空ロータリーテーブルとモーターの一体型製品。
機構設計・部品手配・組み付け調整などの手間やコストを削減できます。
関連メディア
このカタログについて
| ドキュメント名 | 中空ロータリーアクチュエータ DGIIシリーズ αSTEP AZシリーズ搭載/サーボモーター AZXシリーズ搭載 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 9.6Mb |
| 関連製品 | |
| 登録カテゴリ | |
| 取り扱い企業 | オリエンタルモーター株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
中空ロータリーアクチュエータ
DGⅡシリーズ
AZシリーズ搭載
サーボモーター AZXシリーズ搭載
Page2
大慣性の円板・アームなどを直接取り付けられる
中空ロータリーテーブルとモーターの一体型製品。
機構設計・部品手配・組み付け調整などの手間や
コストを削減できます。
中空ロータリーアクチュエータ
モーター横方向
DGⅡシリーズ
モーター縦方向
部品手配、機構設計、 中空出力テーブル 最大許容 繰り返し位置決め精度
組み付け調整の 中空径最大 最大許容トルク アキシアル荷重
手間削減 ϕ100mm 50N·m ±
4000 15arcsec
N (±0.004°)
搭載モーターは、AZシリーズ と AZXシリーズの2種類
AZシリーズ搭載( 19ページ)
●バッテリレスのアブソリュートセンサを内蔵
●最大許容トルク50 N·m
●最高回転速度1800 deg/s
●豊富なラインアップ
●各種FAネットワークに対応
●定価 135,800円∼
(アクチュエータ+ドライバ+ケーブル1m)
·各シリーズのラインアップや仕様については、4∼5ページをご覧ください。
2
Page3
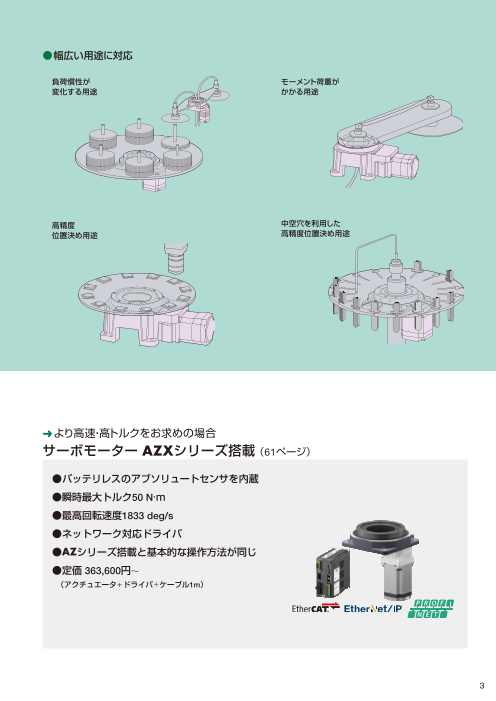
●幅広い用途に対応
負荷慣性が モーメント荷重が
変化する用途 かかる用途
高精度 中空穴を利用した
位置決め用途 高精度位置決め用途
➜より高速・高トルクをお求めの場合
サーボモーター AZXシリーズ搭載( 61ページ)
●バッテリレスのアブソリュートセンサを内蔵
●瞬時最大トルク50 N·m
●最高回転速度1833 deg/s
●ネットワーク対応ドライバ
●AZシリーズ搭載と基本的な操作方法が同じ
●定価 363,600円∼
( アクチュエータ+ドライバ+ケーブル1m)
3
Page4
ラインアップ
AZシリーズ搭載 AC :単相100-120V、単相/三相200-240V入力 DC :DC24/48V入力
アクチュエータ
許容モーメント 許容アキシアル荷重
型番 取付角寸法 減速比 ロスト バック 角度伝達 繰り返し
電磁 中空径 許容 モーター 最高回転
電源入力 ク 方向 速度 [N·m] [N]
ブレーキ トル モーション ラッシ 精度 位置決め精度
[mm] [N·m] [deg/s] [arcmin] [arcmin] [arcmin] [arcsec]
20 40 60 80 500 1000 2000 3000
DGM60 60mm
DC
なし ϕ28 0.9 1200 2 100
95,100円
4
DGM85R 85mm
AC DC なし
ϕ33 4.5 1200 10 500
付 ノ
ン
170,500∼185,900円 バ
ッ
ク
DGM130R 130mm ラ
18 縦 2 ッ
AC DC シ ±15
なし
ϕ62 12 900 50 2000 3
∼1200
付
192,500∼212,300円
DGM200R 200mm
AC
なし
ϕ100 50 660 100 4000 2
付
229,900∼251,900円
DGB85 85mm 12 3
AC DC
なし 18 4.5
36 9
ϕ33 600 10 500
12 3 ∼1800
付 18 4.5
187,000∼202,400円 36 9
横 − 6 6 ±30
DGB130 130mm 18 12
AC DC
なし
36 24
ϕ62 450 50 2000
∼1200
18 12
付
36 24
209,000∼228,800円
●DGB85、DGB130のDC電源入力に電磁ブレーキ付はありません。
AC :単相100-120V、単相/三相200-240V入力 DC :DC24/48V入力
ドライバタイプ
ネットワーク 位置決め機能内蔵 RS-485通信付き パルス列入力 ネットワーク対応 miniドライバ✽
対応ドライバ パルス列入力 多軸ドライバ✽
RS-485通信付きパルス列入力
AC DC AC DC AC DC AC DC DC DC
62,700円 48,400円 57,200円 42,900円 57,200円 42,900円 51,700円 37,400円 88,000∼140,800円 37,400∼48,400円
✽ 製品の詳細は当社のWEBサイトをご覧ください。
4
∼
Page5
サーボモーター AZXシリーズ搭載 AC :単相/三相200-240V入力
アクチュエータ
定格 瞬時最大 モーター 最高回転 許容モーメント 許容アキシアル荷重
型番 取付角寸法 ロスト バック 角度伝達 繰り返し
電磁 中空径 減速比 [N·m] [N]
電源入力 ブレーキ トルク トルク 方向 速度 モーション ラッシ 精度 位置決め精度
[mm] [N·m] [N·m] [deg/s] [arcmin] [arcmin] [arcmin] [arcsec]
20 40 60 80 500 1000 2000 3000
DGM200R 200mm
AC
なし
ノ
ン
バ
ϕ100 18 19 50 縦 1833 100 4000 3 ッ
ク − ±15
ラ
ッ
シ
付
270,900∼293,300円
ドライバタイプ
ネットワーク
対応ドライバ
AC
84,200円
5
∼
Page6
中空ロータリーアクチュエータの特徴
DG シリーズは、中空ロータリーテーブルと を組み合わせた一体型製品です。
アクチュエータ内部は減速機構造のため、高出力駆動が可能です。
特徴
中空出力テーブルにクロスローラベアリング✽を採用し、高出力・高剛性を実現しました。
● 下図はモーター縦方向の構造です。中空出力テーブルの構造については、モーター横方向も同様です。
出力テーブル クロスローラベアリング✽ 部分が駆動します。
歯車
✽ DGM60は深溝玉軸受を採用しています。
中空出力テーブル
(クロスローラ ピニオン
ベアリング✽採用)
モーター
設計の手間削減 高精度位置決め
出力テーブルには、装置のテーブルやアームを直接取り付けることが モーターと回転テーブル機構の組み合わせで高精度位置決めを実現
できます。ベルト、プーリなどの機構部品を使用した場合にくらべ、 しました。
機構設計、部品手配、ベルトテンション調整などの手間やコストを モーター縦方向 モーター横方向
削減できます。 バックラッシ ノンバックラッシ 6arcmin(0.1˚)
繰り返し位置決め精度 ±15arcsec(±0.004˚) ±30arcsec(±0.008˚)
ご注意 精度は一定負荷・一定温度(常温)での値です。
モーターを下にする
用途に合わせてケーブル引き出し方向を選択(AZシリーズ搭載のみ)
モーターケーブルの引き出し方向を用途に合わせてお選びいただ
けます。✽
モーター縦方向
● ケーブル引き出し方向は、3方出力向テかーらブおルを選手び前いにたすだるけます。
ケーブルが下方向 ケーブルが右方向 ケーブルが左方向
モーター+機構部品 DG シリーズ
(別々に設計・手配) (一体型製品)
大口径中空出力テーブルで省配線・配管
大口径の中空穴(貫通)は、引き回しが複雑な配線・配管に利用
することができ、装置設計の簡略化が図れます。
モーター横方向
● 液体を配管した充填装置 ● ケーブル引き出し方向は、2方向からお選びいただけます。
ケーブルが左方向 ケーブルが右方向
取
付 中空径
角
寸 ϕ100mm
法
例:DGM200Rの場合
✽ 取付角寸法によってご用意していない場合があります。 外形図をご確認ください。
型番 取付角寸法 中空径
mm mm
DGM60 60 ϕ28
DG□85R 85 ϕ33
DG□130R 130 ϕ62
DGM200R 200 ϕ100
6
□ 200mm
Page7
スペースに合わせた使い分け
従来の回転テーブル軸とモーター軸が平行に組み付いたタイプ(モーター縦方向)に加えて、回転テーブル軸とモーター軸が垂直に組み付いたタ
イプ(モーター横方向)をラインアップしました。装置内の設置スペースに合わせてお選びいただけます。
(例:取付角寸法85mm 標準タイプの場合)
・取付板からの高さを抑えたい ・取付板からの高さを抑えたい ・取付板下部を有効活用したい
・取付板下部を有効活用したい
モーター横方向 モーター縦方向 モーター縦方向(取付台座有り)
円板
円板 取付台座
(別売)
円板 107.5mm
73mm
35.5mm
取付板 取付板 取付板
●モーター横方向のメリット
# モーターの逃げ穴加工が不要なため、取付板が簡略化できます。
# テーブル下の脚部の間からケーブル・配管等の引き回しが可能です。
モーター縦方向 ケーブル・配管など
モーター横方向 ケーブル・配管など
脚部にケーブルの引き回しが可能
取付板にモーターの逃げ穴加工不要
減速比追加による仕様範囲の拡充(モータ横方向のみ)
モーター横方向のアクチュエータは、減速比12、18、36の3種類を用意しました。
必要速度、必要トルクに合わせて減速比をお選びいただけます。
DGB85R AC 電源入力製品
回転速度ートルク特性(参考値)
10
9
8 高トルク
7 減速比12
6
減速比18
5
減速比36
4
3 高速
2
1
00 300 600 900 1200 1500 1800 2100
回転速度 [deg/s]
7
トルク [N∙m]
Page8
高荷重・高剛性
中空出力テーブルの軸受にクロスローラベアリングを採用し、 〈運転例〉
高荷重・高剛性を実現しました。(DGM60を除く) アクチュエータ品名 : DGM200R-AZAC
ドライバ品名 : AZD-CD
・最大許容アキシアル荷重 4000N 電 源 入 力 : AC200V
・最大許容モーメント 100N·m 張り出し距離 : 160mm
取 付 方 向 : 水平
● 高荷重 ● 高剛性
例 テーブルにワークを6個のせて駆動する場合。 例 テーブル中心から160mm離れた位置にワークをのせ駆動する
場合。
搬送質量 :91kg
テーブル 31kg(直径500mm、厚み20mm、鉄製) 搬送質量 :41kg
ワーク 10kg×6個 テーブル 31kg(直径500mm、厚み20mm、鉄製)
ワーク 10kg×1個
総質量91kg 160mm
ワーク10kg×6個
10kg
10kg 10kg ワーク
10kg
テーブル質量31kg 10kg 10kg
10kg 負荷モーメント15.7[N·m]
アキシアル荷重402[N]
ϕ500mm
[アキシアル荷重] [負荷モーメント]
(31kg+10kg×6個)×gm/s2 893N 10kg×gm/s2×0.16m 15.7N·m
総質量91kgのアキシアル荷重は893N テーブル中央から160mm離れた位置に10kg のワークがある場
DGM200Rの許容アキシアル荷重は4000Nで、許容値以内です。 合、負荷モーメントは15.7N·m
DGM200Rの許容モーメントは100N·mであり、許容値以内です。
高荷重駆動が可能 [アキシアル荷重]
(31kg+10kg)×gm/s2 402N
総質量41kgのアキシアル荷重は402N
DGM200Rの許容アキシアル荷重は4000Nで、許容値以内です。
ロータリーアクチュエータテーブル中央から離れた位
置に高荷重を載せての駆動が可能
■テーブル中央から200mmの位置の負荷モーメントと変位量の関係
大きい型番ほど、受けられる許容モーメントが大きく、かつ負荷モーメントに対する変位量が小さくなります。
テーブル中央からL=200mm離れた位置での変位量
0 負荷モーメント[N·m]
20 40 60 80 100
0
荷重[N] DGM200R
50
負荷 DGM85R
100
負荷モーメント[N•m] DGM130R 高
剛
150 性(
変
テーブル中央からの 200 位
距離L[mm] 量
250 高許容モーメント 小
)
300
8
変位量[μm]
変位量[μm]
Page9
ならではの高性能・高信頼性
は“オープンループ制御”と“クローズドループ制御”の利点をハイブリッドした独自制御を
おこなう、ステッピングモーターベースのモーターです。 モーターの位置などを常時監視しながら、
状況に応じて 2 つの制御を自動で切り替えます。
機敏な応答性で短時間位置決め
ステッピングモーターと同様に、短距離位置決めを短時間でおこ
なえます。パルス指令に同期して運転し、小型ながら高トルクな
モーターのため加速性・応答性に優れています。
運転指令に対する実際のモーターの動き
100ms
運転指令に対して、
実際の動きも
遅れなく追従しています。 AZシリーズ
バッテリレス アブソリュートセンサ搭載
運転指令
急激な負荷変動、急加速でも運転を継続
実際の動き
通常時はパルス指令に同期してオープンループ制御で運転し、小型
スタート信号 で高トルクを発生するため加速性・応答性に優れています。 過負荷
位置決め 時には即座にクローズドループによる制御に切り替わり、位置の補
完了信号 正をおこないます。
時間(目盛:20ms)
〈運転例〉
アクチュエータ品名 : DGM200R-AZAC 低速でも低振動
ドライバ品名 : AZD-CD 標準搭載のマイクロステップ駆動方式とスムースドライブ機能✽によ
電 源 入 力 : AC200V り、減速機構などの機械的要素なしに分解能を上げることができ
搬 送 質 量 91kg ます。このため低速でも速度変動が少なく、一定の速度を保ち続
: テーブル 31kg(直径500mm、厚み20mm、鉄製) けます。
: ワーク 10kg×6個
取 付 方 向 : 水平 * スムースドライブ機能とは
移 動 量 : 60˚ パルス入力設定を変えることなく、フルステップのときと同じ移動量、移動
速度で自動的にマイクロステップ駆動する制御です。
テーブルとワークの合計慣性モーメント=26330×10-4kg・m²
総質量91kg 万が一の異常時にはアラーム信号を出力
ワーク10kg×6個 10kg
10kg 10kg
60˚ 連続した過負荷が加わった場合には、アラーム信号を出力します。
また位置決め完了時には、信号を出力します。このため、高信頼
テーブル質量 性を備えています。
31kg 10kg 10kg
10kg
チューニング不要
通常時はオープンループ制御で運転するため、負荷変動などがあ
ϕ500mm る場合も、設定通りの動きがチューニングなしで得られます。
● 短時間位置決め
DGM200Rの場合、総質量91kgで、60˚の回転を0.59sで駆動可能。 ハンチングなしで停止位置を保持
通常時はオープンループ制御で、停止時に軸が微少に動くハンチング
負荷慣性モーメント-位置決め時間(参考値) と呼ばれる現象を起こしません。 停止位置を確実に保持するため、
DGM200R 停止時に振動があっては困る用途に最適です。
1.6
60˚を0.59sで 180˚
1.4 駆動可能 省エネルギー、低発熱
1.2
1.0 90˚ 高効率モーターを採用することで発熱を低減し、消費電力を削減しま
0.8 60˚ した。
45˚
0.6 30˚
0.4 15˚
0.2
0
0 20000 40000 60000
負荷慣性モーメント JL [×10−4kg∙m2]
カタログ上のデータより、位置決め時間を推測可能
高荷重でも短時間位置決めが可能
9
位置決め時間 [s]
速度(目盛:500r/min)
Page10
AZシリーズ搭載
アブソリュートシステムによる
簡単な原点設定、原点復帰 バッテリレス
多回転
アブソリュート
センサ搭載 ABZOセンサ
小型の機械式多回転アブソリュートセンサ<ABZOセンサ>を
開発しました(特許取得)。生産性の向上や、コスト削減に貢献できます。
原点センサ不要 高速原点復帰
アブソリュートシステムのため、原点センサが不要です。 原点センサを用いずに原点復帰が可能なため、センサの
感度を気にせずに高速で原点復帰がおこなえ、マシンサイクル
短縮に繋がります。
コストダウン
センサ費用や配線費用が削減でき、 原点センサ検出による AZシリーズ搭載の
システムコストダウンが図れます。
原点復帰運転 原点復帰運転
省配線 センサ感知により原点を 原点位置を把握している
認識するため、低速で移動 ため、高速で原点に復帰
省配線となり、装置設計の自由度がアップします。 可能
(ZHOME運転)
外部センサ誤作動の影響をうけない 0˚
外部センサの誤動作や故障、断線といった心配がありません。 原点センサ 原点
低速 高速
原点復帰精度向上 −90˚ +90˚ −90˚ +90˚
原点センサ感知のばらつきを気にすることなく原点復帰をおこな
えるため、原点の精度を向上できます。
※リミットセンサを取り付けない場合、ドライバのソフトウェアリミットを使用
すると、限界値を超える動作を防げます。 −180˚ −180˚
簡単な原点設定
ドライバ表面のスイッチを押すことで簡単に原点を設定でき、ABZO
センサで原点位置を保存します。また、サポートソフト(MEXE02)や 原点復帰が不要
外部入力信号からの原点設定も可能です。 位置決め運転中に電源が遮断されても、位置情報は保存
されます。 位置決め機能内蔵タイプの場合、生産ライン
での非常停止時や停電時からの復旧の際、原点復帰をしな
くても位置決め運転を再開できます。
位置決め機能内蔵タイプの場合
非常停止後、原点復帰せずに運転再開可能
HOME PRESET
スイッチ 0˚
運転再開
非常停止
−90˚ +90˚
運転開始 目的地
−180˚
10
Page11
機械式センサのため、 バッテリ不要
バッテリレス
機械式センサのためバッテリが不要です。位置情報は
ABZOセンサで機械的に管理されているため、電源を落とし
ても、モーター/ドライバ間のケーブルを外しても、位置情
報を保持できます。
メンテナンスの削減 海外輸送も安心
バッテリの交換が必要がなく、メンテナンスの手間やコストを バッテリは自己放電するため、海外輸送といった長期間の装置
削減できます。 搬送では注意が必要です。ABZOセンサはバッテリ不要であり、
位置情報の保持に期限はありません。またバッテリを海外に輸
自由なドライバの設置 出する際の各種規制等も考慮する必要がありません。
バッテリ交換用のスペース確保も不要なため、ドライバの設置 モーター/ドライバ間のケーブルを外しても位置保持
場所の制約がなく、制御盤等のレイアウト設計の自由度が上
がります。 位置情報はABZOセンサ内で保持します。
AZシリーズ搭載ならではの便利な機能
便利な運転・設定
AZシリーズの機能を使うと、中空ロータリーアクチュエータの出力テーブル上で座標管理がおこなえ、下記運転が可能です。
近回り運転でタクトタイム短縮 進入禁止範囲の設定で制御が簡単
設定した目標位置に向かって、最短距離で移動する回転方向で駆動 装置上で障害物等がある場合、出力テーブル上で可動させたくない
する運転方式です。装置のタクトタイムを短縮することができます。 範囲を設定することができます。
0(̊360˚) 0˚
近回り 可動範囲
例)
0˚の位置から270˚に移動
270˚ 90˚ −90˚ +90˚
する場合、反時計回りの
最短の回転方向を自動的
遠回り に選択して駆動します。
180˚ −180˚ 進入禁止範囲
0˚
装置立ち上げ時間の短縮
原点
中空ロータリーアクチュエータを運転する際に必要なパラメータが、
出荷時に設定されています。装置立ち上げ時間短縮に貢献します。 CCW方向 CW方向
・原点位置 −90˚ +90˚
・分解能設定(0.01˚/step)
・出力テーブルの回転方向設定
・ラウンド設定±180˚
● 各初期設定値は変更できます。 −180˚
11
Page12
上位システムに合わせて選べるドライバ
ネットワーク対応 ドライバ AC DC AZ搭載 AZX搭載
EtherCAT、EtherNet/IP、PROFINET、MECHATROLINK-Ⅲ、SSCNETⅢ /H通信に対応したドライバです。ネットワーク上からの直接制御
が可能です。上位制御機器とドライバを通信ケーブル1本で接続するため、省配線を実現します。
上位制御機器
●AZシリーズモーターまたは、AZシリーズモーターを
搭載した電動アクチュエータを接続できます。
ネットワーク対応 ドライバ
● AZX搭載は、EtherCAT、EtherNet/IP、PROFINET通信に対応しています。
位置決め機能内蔵タイプ AC DC AZ搭載
運転データをドライバに設定し、上位から運転データの選択、実行をするタイプです。 上位との接続、制御は I/O、Modbus(RTU)、RS-485
通信、FAネットワークのいずれかでおこなえます。ネットワークコンバータ(別売)を使用することにより、EtherCAT通信、MECHATROLINK通信、
CC-Link通信で制御できます。
● I/Oで ● コンピュータまたは ● シリアル通信で ● FAネットワークで 基本設定(出荷時設定)
制御する場合 タ ッ チ パ ネ ル か ら 制御する場合 制御する場合 ドライバ
CPU 位置決め 制御する場合 CPU CPU
ユニット シリアル通信 電源 FA ネットワーク モーター
電源 I/O 不要 電源 ユニット ユニット
モーターまたは
電動アクチュエータ ドライバ
FAネットワーク +
ネットワーク 運転データ設定 パラメータ変更
コンバータ
I/O Modbus(RTU) Modbus(RTU) (別売) サポートソフト(MEXE02)
RS-485
モーターの運転に必要な情報をドライバに持たせるため、上位PLCの負担が軽減しま
す。 複数軸制御の場合のシステム構成がシンプルになります。 サポートソフト、もし
くはRS-485通信による設定となります。
RS-485通信による設定も可能です
FLEX(フレックス)とは、I/O制御、Modbus(RTU)制御、ネットワークコンバータ経由でのFAネットワーク制御に対応した製品の総称です。
RS-485 通信付き パルス列入力タイプ AC DC AZ搭載
ドライバに対してパルスを入力することで運転を実行するタイプです。 お客さまがご用意する位置決めユニット(パルス発振器)からモーターの
制御をおこないます。RS-485通信を使用することで、モーターのステータス情報(位置、速度、トルク、アラーム、温度など)をモニタするこ
とができます。
位置、速度 基本設定(出荷時設定) I/O 割付変更 パラメータ変更
コンピュータまたは サポートソフト(MEXE02)
タッチパネルから
制御する場合 CPU パルス列入力
シリアル通信
電源 ユニット
位置決め +
ユニット
モーターまたは ドライバ サポートソフト(MEXE02)を
電動アクチュエータ 使用することで、アラーム履歴
Modbus(RTU) の確認や各種状態のモニタが
モーターのステータス情報 できます。
12
Page13
パルス列入力タイプ AC DC AZ搭載
ドライバに対してパルスを入力することで運転を実行するタイプです。 お客様がご用意する位置決めユニット(パルス発振器)からモーター
の制御をおこないます。 サポートソフト(MEXE02)を使用することで、アラーム履歴の確認や各種状態のモニタができます。
基本設定(出荷時設定) I/O 割付変更 パラメータ変更
サポートソフト(MEXE02)
CPU
電源 I/O 位置、速度
位置決め
ユニット
パルス列入力 +
モーターまたは ドライバ サポートソフト(MEXE02)を使用する
電動アクチュエータ ことで、アラーム履歴の確認や各種状
態のモニタができます。
ネットワーク対応 多軸ドライバ ✽
DC AZ搭載
EtherCAT、MECHATROLINK-III、SSCNET III/Hに対応した多軸ドライバです。AZシリーズ DC電源入力のモーターと、それらを搭載している
アクチュエータを接続できます。2軸、3軸、4軸接続できるドライバをご用意しています。
上位制御機器
●AZシリーズモーターと、AZシリーズモーターを
搭載した電動アクチュエータを接続できます。
多軸ドライバ
✽ 製品の詳細は当社WEBサイトをご覧ください。
miniドライバ ✽
DC モバイルオートメーション対応製品 AZ搭載
小型・軽量を追求しました。 狭いスペースにも設置できます。
バッテリ電源で使用できるワイドな電圧仕様のため、自走装置への組み込みにも適しています。
●「 モバイルオートメーション対応製品」とは
「モバイルオートメーション対応製品」は、バッテリ駆動・小型軽量を共通コンセプトとする製品群です。
自走装置や移動設備への搭載に最適で、今後一層求められる自由自在な自動化ライン、
モバイルオートメーションの実現に貢献します。
✽ 製品の詳細は当社WEBサイトをご覧ください。
RS-485通信付きパルス列入力
● 対応ドライバは、公式な EtherCATコンフォーマンステストに合格しています。
● は Beckhoff Automation GmbH(ドイツ)よりライセンスを受けた特許取得済み技術であり、登録商標です。
● は ODVAの商標です。
● は PROFIBUS Nutzerorganisation e.V(. PNO)の商標または登録商標です。
● はMECHATROLINK協会の登録商標です。
● は三菱電機株式会社の登録商標または商標です。
● は CC-Link協会の登録商標です。
●サポートソフト(MEXE02)は当社WEBサイトからダウンロードできます。
13
Page14
サポートソフトによる簡単設定・簡単動作
サポートソフトを使用することにより、データの設定や実際の駆動、また各種モニタ機能による確認が、パソコン上で簡単におこなえます。
サポートソフト MEXE02 各種モニタ機能
サポートソフトは当社WEBサイ
トからダウンロードできます。 ● I/Oモニタ
ドライバに配線されて
いるI/Oの状態が、パソ
コン上で確認できます。
配線後のI/Oチェックや、
● 運転データ /パラメータ設定 動作時のI/Oチェックに
運転データやパラメータの設定が、 ご使用ください。
パソコン上で簡単におこなえます。
また設定データを保存できるので、
ドライバを交換したときなど、保存 ● 波形モニタ
したデータを転送するだけで同じ設 オシロスコープのような
定にできます。 イメージで、モーターの
運転状態(指令速度、モー
● ティーチング・リモート運転 ター負荷率など)を確認
することができます。装
サポートソフト上や手動で位置合 置の立上げ・調整時など
わせを行い、運転指令情報としてド にご使用ください。
ライバに取り込むことが可能です。
装置立ち上げ時にご活用ください。
● アラームモニタ
異常が発生したときに、
異常の内容と対処方法
が確認できます。
手動で位置合わせ
●マ ルチモニタリング対応のため、モニタしながらリモート運転をおこなったり、
ティーチングすることができます。
シーケンス機能によりメインプログラムを簡略化
(一部機種を除く)
AZシリーズは、連結運転や運転間のタイマ設定、条件分岐、ループ回数などの豊富なシーケンス機能を搭載しています。
上位システムのシーケンスプログラムを簡略化できます。
START ● 位置決め運転データ設定数(最大256点)
● 汎用入出力点数(入力10点、出力6点)
位置決め機能 ● 通信用入出力点数(入力16点、出力16点)
内蔵タイプ
ドライバ
出力
位置決め運転① 外部機器
待ち時間設定
入力
条件の設定 外部センサ
繰り返し回数
設定
位置決め運転②
END
■使い方ナビのご紹介
当社WEBサイトでは、AZシリーズの便利な機能・使い
方を動画でわかりやすく紹介しています。是非ご利用く
ださい。
トップ 〉 サポート・お問い合わせ 〉 使い方ナビ
または、
https://www.orientalmotor.co.jp/ja/support/tutorials
14
Page15
用途例・使用例
高剛性を必要とする用途 高性能モーターを必要とする用途
● 負荷モーメントがかかる用途 ● 高精度位置決め用途(画像検査装置) ● 負荷慣性が変化する用途(ディスク製造装置)
取付方向例
DG シリーズは、水平取付はもちろん、天井や壁掛取付も可能ですので、装置設計の幅が広がります。
ご注意
中空ロータリーアクチュエータから、まれに少量のグリースがにじみ出ることがあります。グリース漏れによる周囲環境の汚染が問題となる場合には、定期点検時に
ご確認いただくか、油受けなどの損害防止装置を取り付けてください。
モーター縦方向 モーター横方向
天井取付
天井取付
壁掛取付
壁掛取付
水平取付
水平取付
15
Page16
サーボモーター
AZXシリーズ搭載
高速で高トルクを発揮 ケーブルの引き出し方向を変更
AZXシリーズ搭載は、高速で高トルクを発揮します。 AZXシリーズ搭載は、モーターをカップリングで締結するため、
移動量が多い位置決め用途や、連続運転用途に適しています。 モーター部の取り外しができます。
60 モーターの向きを変えることで、ケーブルの引出し方向を変更で
瞬時最大トルク DGM200 AZX搭載 きるため、設計時の自由度がアップします。
50 DGM200 AZ搭載
40
短時間運転領域
30
定格トルク
20
10 連続運転領域
00 300 600 900 1200 1500 1800 2100
回転速度 [deg/s]
● DG シリーズAZX搭載とAZ搭載の回転速度―トルク特性の比較です。
AZXシリーズ搭載は高速域、AZシリーズ搭載は低速域でトルクの優位性
があります。
バッテリレスのアブソリュートセンサを搭載したサーボモーター
駆動モーターのサーボモーター AZXシリーズは、 AZシリーズと同じバッテリレスの機械式アブソリュートセンサ(ABZOセンサ)を
搭載しています。位置決め運転や連続運転に特化したサーボモーターです。
● 機械式センサ
非通電時も位置情報を保持
● 多回転アブソリュートセンサ
基準となる原点から、モーター軸で±900回転
バッテリレス (1800回転分)の絶対位置が検出可能
アブソリュートセンサ
(ABZOセンサ)
● AZXシリーズの詳細は、WEBサイトまたは個別カタログ(S-26)をご確認ください。
AZシリーズ搭載と基本的な操作方法が同じ
AZXシリーズ搭載は、AZシリーズ搭載と基本的な操作方法が同じです。
同じ装置内で、併用する場合に操作性の面で負担を減らすことができます。
配線 信号系の配線
設定 スイッチやパラメータの機能、設定方法(MEXE02を使用)
制御 ネットワークで制御する場合のパラメータ ID番号
運転機能 ドライバに内蔵している位置決め運転機能など
操作方法が同等
AZXシリーズ AZシリーズ
16
トルク [N∙m]
Page17
"組み合わせ一覧
● AZシリーズ搭載
# AC電源入力
種類 シリーズ 品名
DGM85R-AZ ■ C
■
中空ロータリー DGM130R-AZ C ■
■
アクチュエータ DG シリーズ DGM200R-AZ C ■
DGB85R □ □-AZ ■ C ■
DGB130R □ □-AZ ■ C ■
+
種類 タイプ 品名
位置決め機能内蔵タイプ AZD-AD、AZD-CD
RS-485通信付きパルス列入力タイプ AZD-AX、AZD-CX
パルス列入力タイプ AZD-A、AZD-C
EtherNet/IP対応 AZD-AEP、AZD-CEP
ドライバ
EtherCAT対応 AZD-AED、AZD-CED
PROFINET対応 AZD-APN、AZD-CPN
MECHATROLINK-Ⅲ対応 AZD-AM3、AZD-CM3
SSCNETⅢ /H対応 AZD-AS3、AZD-CS3
+
種類 タイプ 品名
接続ケーブルセット モーター/エンコーダ用:CC◇◇◇VZF
接続ケーブルセット/ モーター/エンコーダ /電磁ブレーキ用:CC◇◇◇VZFB
可動接続ケーブルセット
可動接続ケーブルセット モーター/エンコーダ用:CC◇◇◇VZR
モーター/エンコーダ /電磁ブレーキ用:CC◇◇◇VZRB
● 品名中の記号には、以下の種類を表す文字や数字が入る場合があります。
□:減速比 ■:モーター部形状 ■:ケーブル引き出し方向 ◇:ケーブル長さ
# DC電源入力
種類 シリーズ 品名
DGM60-AZAK
中空ロータリー DGM85R-AZ ■ K
アクチュエータ DG シリーズ DGM130R-AZ ■ K ■
DGB85R □ □-AZAK ■
DGB130R □ □-AZAK ■
+
種類 タイプ 品名
位置決め機能内蔵タイプ AZD-KD
RS-485通信付きパルス列入力タイプ AZD-KX
パルス列入力タイプ AZD-K
ドライバ
EtherNet/IP対応 AZD-KEP
EtherCAT対応 AZD-KED
PROFINET対応 AZD-KPN
+
種類 タイプ 品名
接続ケーブルセット CC◇◇◇VZ2F2
DGM60用
可動接続ケーブルセット CC◇◇◇VZ2R2
接続ケーブルセット/ DGM85、 ◇◇
可動接続ケーブルセット 接続ケーブルセット モーター/エンコーダ用:CC◇ VZF2
DGM130、 モーター/エンコーダ /電磁ブレーキ用:CC◇◇◇VZFB2
DGB85、 ◇◇◇
DGB130用 可動接続ケーブルセット モーター/エンコーダ用:CC VZR2
モーター/エンコーダ /電磁ブレーキ用:CC◇◇◇VZRB2
● 品名中の記号には、以下の種類を表す文字や数字が入る場合があります。
□:減速比 ■:モーター部形状 ■:ケーブル引き出し方向 ◇:ケーブル長さ
● AZXシリーズ搭載
# AC電源入力
種類 シリーズ 品名
中空ロータリー
アクチュエータ DG シリーズ DGM200R18-AZX ■ C
+
種類 タイプ 品名
EtherCAT対応 AZXD-SED
ドライバ EtherNet/IP対応 AZXD-SEP
PROFINET対応 AZXD-SPN
+
種類 タイプ 品名
接続ケーブルセット モーター/エンコーダ用:CC◇◇◇VXF
接続ケーブルセット/ モーター/エンコーダ /電磁ブレーキ用:CC◇◇◇VXFB
可動接続ケーブルセット
可動接続ケーブルセット モーター/エンコーダ用:CC◇◇◇VXR
モーター/エンコーダ /電磁ブレーキ用:CC◇◇◇VXRB
●品名中の記号には、以下の種類を表す文字や数字が入る場合があります。
■:モーター部形状 ◇:ケーブル長さ
17
Page18
仕様表の見方
"中空ロータリーアクチュエータ仕様
取付角寸法 85mm 200mm
標準 DGM85R-AZAC DGM200R18-AZXAC
アクチュエータ品名
電磁ブレーキ付 DGM85R-AZMC DGM200R18-AZXMC
① 出力テーブル支持軸受種類 クロスローラベアリング クロスローラベアリング
② 慣性モーメント J:kg·m2 21120×10-7 760000×10-7
[26304×10-7]✽ [786000×10-7]✽
減速比 18 18
③ 出力テーブル部最小移動量 deg/STEP 0.01 0.01
④ 許容トルク N·m 4.5 -
⑤ 定格トルク N·m - 19
⑥ 瞬時最大トルク N·m - 50
通電時 N·m 2.7 -
⑦ 停止時保持トルク
電磁ブレーキ N·m 2.7 -
⑧ 最高回転速度 deg/s 120(0 200r/min) 183(3 305r/min)
⑨ 繰り返し位置決め精度 arcsec ±1(5 ±0.004˚) ±1(5 ±0.004˚)
⑩ ロストモーション arcmin (2 0.033˚) (3 0.050˚)
⑪ 角度伝達精度 arcmin (4 0.067˚) -
⑫ 許容アキシアル荷重 N 500 4000
⑬ 許容モーメント N·m 10 100
⑭ 出力テーブル面振れ mm 0.015 0.015
⑮ 出力テーブル内(外)径振れ mm 0.015 0.030
⑯ 出力テーブル平行度 mm 0.03 0.05
①出力テーブル支持軸受種類 ⑩・ロストモーション[モーター縦方向]
出力テーブルに使用している軸受の種類です。 出力テーブルをある位置で正転方向から位置決めしたときと、
逆転方向から同じ位置で位置決めしたときの停止角度の差を
②慣性モーメント
モーター部ローター慣性モーメントと減速機構部慣性モーメン いいます。
トを、出力テーブル上で換算した値の合計です。 ・バックラッシ[モーター横方向]
モーター軸を固定したときのギヤ出力軸の遊びのことです。
③出力テーブル部最小移動量 両方向から位置決めするときは位置決め精度に影響します。
設定可能な最小移動量です。(出荷時)
⑪角度伝達精度
④許容トルク 入力パルス数から計算される出力テーブルの理論的な回転角度
減速機構部の機械的強度の限界値です。加速トルク、負荷変動 と、実際の回転角度の差をいいます。
分も含めてこの許容トルク以下でお使いください。
⑫許容アキシアル荷重
⑤定格トルク 出力テーブルの軸方向に加わるアキシアル荷重の許容値を表し
モーターの定格出力、定格回転速度で運転するときに出力する ます。
トルクをいいます。
⑬許容モーメント
⑥瞬時最大トルク 出力テーブルの中心より偏心した位置に荷重がかかる場合、出
慣性負荷の起動・停止などの加速・減速運転時にギヤ出力軸に 力テーブルを傾ける力が作用します。そのときの中心からの偏
加えられるトルクの最大値です。 心量×荷重で計算される負荷モーメントの許容値をいいます。
⑦停止時保持トルク ⑭出力テーブル面振れ
通電時: 通電した状態で、出力テーブルが停止した位置を保持 無負荷で出力テーブルを回転させたときの出力テーブル取付面
できる最大の力です。 の振れの最大値をいいます。
電磁ブレーキ: 電磁ブレーキにて、出力テーブルが停止した位
⑮出力テーブル内(外)径振れ
置を保持できる最大の力です。
電磁ブレーキは無励磁作動型です。 無負荷で出力テーブルを回転させたときのテーブル内径もしく
は外径の振れの最大値をいいます。
⑧最高回転速度
⑯出力テーブル平行度
減速機構部の機械的強度により許容できる出力テーブルの回転
速度です。 アクチュエータの装置側取付面に対して出力テーブルの取付面
がどのくらい傾いているかを表します。
⑨繰り返し位置決め精度
同じ位置に同じ方向から繰り返し位置決めしたときに、どれだ
けの誤差が生じるかを表した値です。
18
仕様表の見方 種類と価格 システム構成 仕様・特性 外形図
Page19
中空ロータリーアクチュエータ
この製品に関する技術資料、法令・規
DG シリーズ AZシリーズ搭載 格については当社WEBサイトをご覧
AC電源入力 ください。
"品名の見方
● 中空ロータリーアクチュエータ
◇ モーター縦方向 ① シリーズ名 DGM:DG シリーズ
DGM 130 R - AZ A C R 取付角寸法 85:85mm
② 130:130mm
200:200mm
① ② ③ ④ ⑤ ⑥ ⑦
③ 出力テーブル
支持軸受種類 R:クロスローラベアリング
④ 搭載モーター AZ:AZシリーズ
⑤ モーター部形状 A:標準
M:電磁ブレーキ付
⑥ モーター仕様 C:AC電源入力仕様
ケーブル引き出し方向✽ なし:下方向
⑦ R:右方向
L:左方向
✽ ケーブル引き出し方向は、出力テーブルを手前にして、モーターを下にしたと
きのケーブルの向きです。
モーターを下にする
出力テーブルを手前にする
ケーブルが下方向 ケーブルが右方向 ケーブルが左方向
◇ モーター横方向 ① シリーズ名 DGB:DG シリーズ
DGB 85 R 12 - AZ A C R ② 取付角寸法 85:85mm
130:130mm
③ 出力テーブル
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ 支持軸受種類 R:クロスローラベアリング
④ 減速比
⑤ 搭載モーター AZ:AZシリーズ
⑥ モーター部形状 A:標準
M:電磁ブレーキ付
⑦ モーター仕様 C:AC電源入力仕様
⑧ ケーブル引き出し方向✽ R:右方向
L:左方向
✽ ケーブル引き出し方向は、出力テーブルを上にして、モーターを手前にしたと
きのケーブルの向きです。
出力テーブルを上にする L:ケーブルが左方向 R:ケーブルが右方向
モーターを手前にする
● ドライバ ① ドライバ種類 AZD:AZシリーズドライバ
AZD - C D ② 電源入力 A:単相100-120V
C:単相 /三相200-240V
種類 D:位置決め機能内蔵タイプ
① ② ③ X:RS-485通信付きパルス列入力タイプ
なし:パルス列入力タイプ
EP
③ :EtherNet/IP対応
ED:EtherCAT対応
PN:PROFINET対応
M3:MECHATROLINK-Ⅲ対応
S3:SSCNETⅢ /H対応
19
AZシリーズ搭載 AZシリーズ搭載 AZXシリーズ搭載 周辺機器
AC電源入力 DC電源入力 AC電源入力 AZシリーズ搭載用
Page20
● 接続ケーブルセット/可動接続ケーブルセット
CC 050 V Z F B ① CC:ケーブル
長さ 005:0.5m 010:1m 015:1.5m
020
① ② ③ ④ ⑤ ⑥ ② :2m 025:2.5m 030:3m
040:4m 050:5m 070:7m
100:10m 150:15m 200:20m
③ 追番
④ 適用機種 Z:AZシリーズ用
⑤ ケーブル種類 F:接続ケーブルセット
R:可動接続ケーブルセット
⑥ 内容 なし:電磁ブレーキなし用
B:電磁ブレーキ付用
"種類と価格
● 中空ロータリーアクチュエータ
◇ モーター縦方向
# 標準 # 電磁ブレーキ付
取付角寸法 品名 定価 取付角寸法 品名 定価
85mm DGM85R-AZAC 170,500円 85mm DGM85R-AZMC 185,900円
DGM130R-AZAC DGM130R-AZMC
130mm DGM130R-AZACR 192,500円 130mm DGM130R-AZMCR 212,300円
DGM130R-AZACL DGM130R-AZMCL
DGM200R-AZAC DGM200R-AZMC
200mm DGM200R-AZACR 229,900円 200mm DGM200R-AZMCR 251,900円
DGM200R-AZACL DGM200R-AZMCL
◇ モーター横方向
# 標準 # 電磁ブレーキ付
取付角寸法 品名 定価 取付角寸法 品名 定価
DGB85R12-AZACR DGB85R12-AZMCR
DGB85R12-AZACL DGB85R12-AZMCL
DGB85R18-AZACR
85mm DGB85R18-AZACL 187,000円 DGB85R18-AZMCR
85mm DGB85R18-AZMCL 202,400円
DGB85R36-AZACR DGB85R36-AZMCR
DGB85R36-AZACL DGB85R36-AZMCL
DGB130R18-AZACR DGB130R18-AZMCR
DGB130R18-AZACL
130mm DGB130R36-AZACR 209,000円 DGB130R18-AZMCL
130mm DGB130R36-AZMCR 228,800円
DGB130R36-AZACL DGB130R36-AZMCL
● ドライバ
◇ 位置決め機能内蔵タイプ ◇ RS-485通信付きパルス列入力タイプ
電源入力 品名 定価 電源入力 品名 定価
単相100-120V AZD-AD 57,200円 単相100-120V AZD-AX 57,200円
単相 /三相200-240V AZD-CD 57,200円 単相 /三相200-240V AZD-CX 57,200円
◇ パルス列入力タイプ ◇ EtherNet/IP対応
電源入力 品名 定価 電源入力 品名 定価
単相100-120V AZD-A 51,700円 単相100-120V AZD-AEP 62,700円
単相 /三相200-240V AZD-C 51,700円 単相 /三相200-240V AZD-CEP 62,700円
◇ EtherCAT対応 ◇ PROFINET対応
電源入力 品名 定価 電源入力 品名 定価
単相100-120V AZD-AED 62,700円 単相100-120V AZD-APN 62,700円
単相 /三相200-240V AZD-CED 62,700円 単相 /三相200-240V AZD-CPN 62,700円
◇ MECHATROLINK-Ⅲ対応 ◇ SSCNETⅢ /H対応
電源入力 品名 定価 電源入力 品名 定価
単相100-120V AZD-AM3 62,700円 単相100-120V AZD-AS3 62,700円
単相 /三相200-240V AZD-CM3 62,700円 単相 /三相200-240V AZD-CS3 62,700円
20
仕様表の見方 種種類類とと価価格格 システム構成 仕様・特性 外形図