


EtherCAT、RealtimeExpress(RTEX)製品の特長や機能、仕様紹介
産業用ネットワークであるEtherCATやRealtimeExpress(RTEX)に対応したネットワーク製品の紹介。
システム構成イメージやMainデバイス(マスタ)に搭載している当社独自開発技術である「PGS(パルス生成ソフト)」の機能紹介(軽着陸機能やガントリー制御、ピッチ補正、タイミング出力など)や、各製品の仕様についての紹介。
このカタログについて
| ドキュメント名 | フィールドバスモーション紹介(総合カタログ抜粋) |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 3.3Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社コスモテックス (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
MOTOR CONTROLLER
Fieldbus Motion
Fieldbus Motion Realtime Express(RTEX) / EtherCAT対応 モーション Motion Network
Realtime Express(RTEX)
コスモテックスでは、多軸同期制御・高速通信を得意としモータ制御に特化したネットワークである、パナソニック社提唱の
EtherCAT 「RTEX」と、多様な機器メーカが参入しているオープンフィールドバスの「EtherCAT」の2 つに対応したモーションコントローラ
をラインナップしています。
ネットワーク対応型のコントローラには、制御機能の中心にコスモテックスが独自開発したパルス生成ソフト「PGS」を搭載し、
LSI 制御では難しかった同期・連動機能や微細な速度変更、高分解能に対応するための最高速度やカウンタ機能の強化を多岐
にわたり実装しています。さらにこれらの機能をPC環境に左右されず、ガントリー制御・制振制御と言った機械向けの機能や、
画像処理・微細部品ワーク動作向けの機能をオプションなしで実現できます。
※EtherCAT®は、ドイツBeckhoff Automation GmbHによりライセンスされた特許取得済み技術であり登録商標です。
※Realtime ExpressおよびRTEXは、パナソニック ホールディングス株式会社の登録商標です。
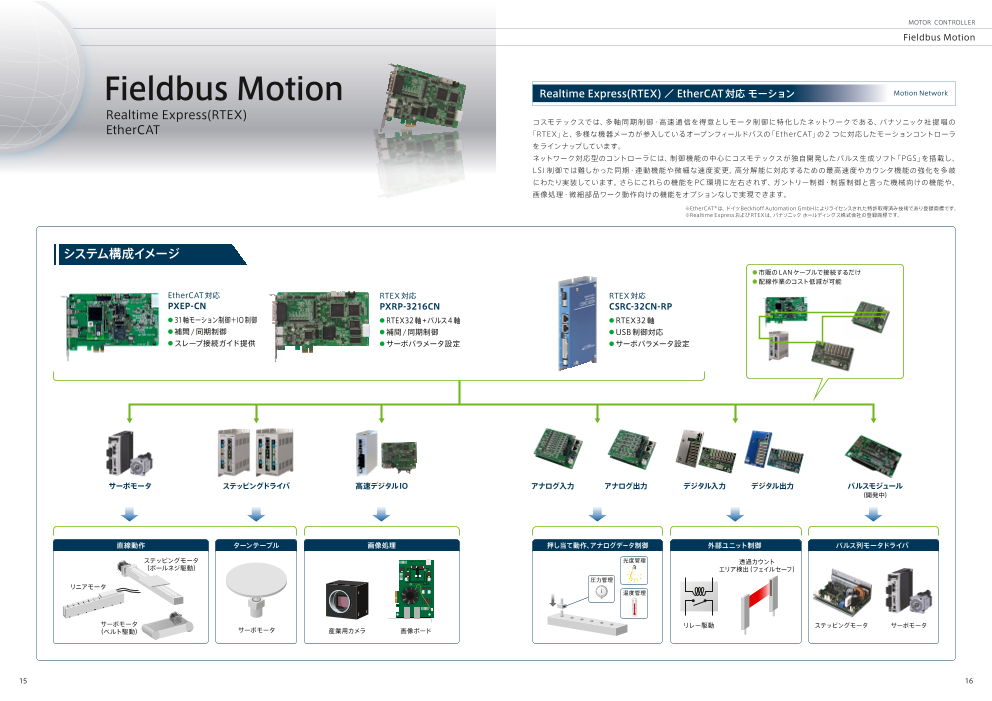
システム構成イメージ
● 市販のLANケーブルで接続するだけ
● 配線作業のコスト低減が可能
EtherCAT対応 RTEX対応 RTEX対応
PXEP-CN PXRP-3216CN CSRC-32CN-RP
● 31軸モーション制御+IO制御 ● RTEX32軸+パルス4軸 ● RTEX32軸
● 補間/同期制御 ● 補間/同期制御 ● USB制御対応
● スレーブ接続ガイド提供 ● サーボパラメータ設定 ● サーボパラメータ設定
サーボモータ ステッピングドライバ 高速デジタルIO アナログ入力 アナログ出力 デジタル入力 デジタル出力 パルスモジュール
(開発中)
直線動作 ターンテーブル 画像処理 押し当て動作、アナログデータ制御 外部ユニット制御 パルス列モータドライバ
ステッピングモータ 光度管理 透過カウント
(ボールネジ駆動) エリア検出(フェイルセーフ)
圧力管理
リニアモータ
温度管理
サーボモータ リレー駆動 ステッピングモータ サーボモータ
(ベルト駆動) サーボモータ 産業用カメラ 画像ボード
15 16
Page2
MOTOR CONTROLLER
Fieldbus Motion
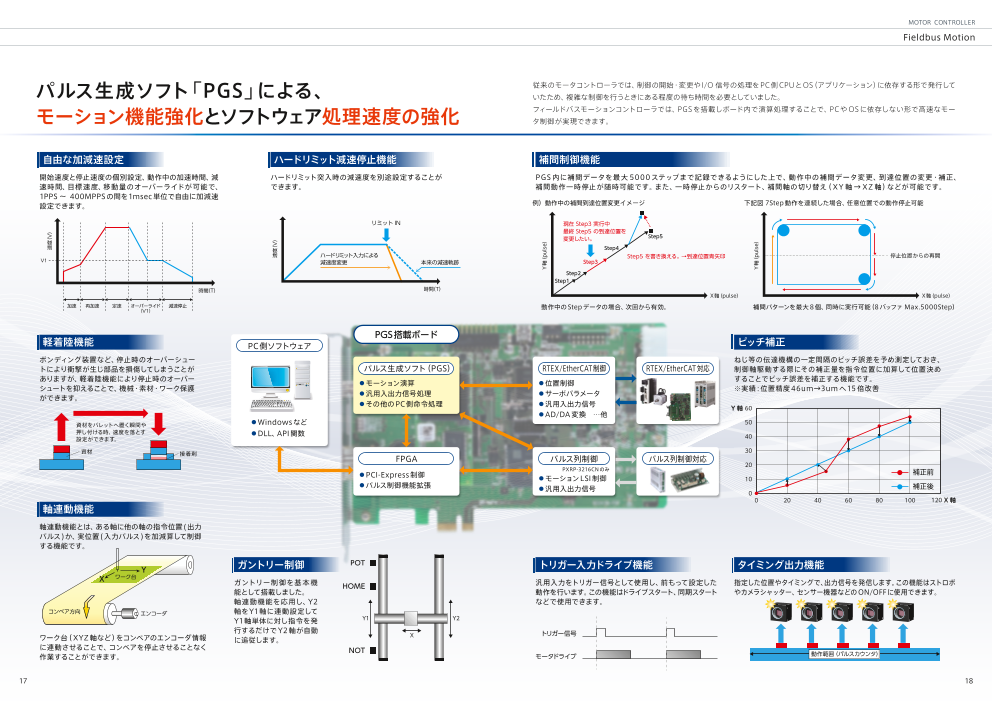
パルス生成ソフト「PGS」による、 従来のモータコントローラでは、制御の開始・変更やI/O 信号の処理をPC側CPUとOS(アプリケーション)に依存する形で発行して
いたため、複雑な制御を行うときにある程度の待ち時間を必要としていました。
モーション機能強化とソフトウェア処理速度の強化 フィールドバスモーションコントローラでは、PGSを搭載しボード内で演算処理することで、PCやOSに依存しない形で高速なモー
タ制御が実現できます。
自由な加減速設定 ハードリミット減速停止機能 補間制御機能
開始速度と停止速度の個別設定、動作中の加速時間、減 ハードリミット突入時の減速度を別途設定することが PGS内に補間データを最大5000ステップまで記録できるようにした上で、動作中の補間データ変更、到達位置の変更・補正、
速時間、目標速度、移動量のオーバーライドが可能で、 できます。 補間動作一時停止が随時可能です。また、一時停止からのリスタート、補間軸の切り替え(XY軸→XZ軸)などが可能です。
1PPS ~ 400MPPSの間を1msec単位で自由に加減速
設定できます。 例)動作中の補間到達位置変更イメージ 下記図 7Step動作を連続した場合、任意位置での動作停止可能
リミット IN 現在 Step3 実行中
最終 Step5 の到達位置を
変更したい。 Step5
Step4
ハードリミット入力による Step5 を書き換える。 →到達位置青矢印 停止位置からの再開
V1 減速度変更 本来の減速軌跡 Step3
Step2
Step1
時間(T) 時間(T)
X軸(pulse) X軸(pulse)
加速 再加速 定速 オーバーライド 減速停止
(V1) 動作中のStepデータの場合、次回から有効。 補間パターンを最大8個、同時に実行可能(8バッファ Max.5000Step)
PGS搭載ボード
軽着陸機能 PC側ソフトウェア ピッチ補正
ボンディング装置など、停止時のオーバーシュー ねじ等の伝達機構の一定間隔のピッチ誤差を予め測定しておき、
トにより衝撃が生じ部品を損傷してしまうことが パルス生成ソフト(PGS) RTEX/EtherCAT制御 RTEX/EtherCAT対応 制御軸駆動する際にその補正量を指令位置に加算して位置決め
ありますが、軽着陸機能により停止時のオーバー
● モーション演算 ● 位置制御 することでピッチ誤差を補正する機能です。
シュートを抑えることで、機械・素材・ワーク保護 ※実績:位置精度46um→3umへ15倍改善
●
ができます。 汎用入出力信号処理 ● サーボパラメータ
● その他のPC側命令処理 ● 汎用入出力信号 Y 軸 60
● AD/DA変換 …他
資材をパレットへ置く瞬間や ● Windowsなど 50
押し付ける時、速度を落とす ● DLL、API関数
設定ができます。 40
資材 接着剤 30
FPGA パルス列制御 パルス列制御対応
20
PXRP-3216CNのみ
● PCI-Express制御 補正前
● モーションLSI制御 10
● パルス制御機能拡張 ● 汎用入出力信号 補正後
0
0 20 40 60 80 100 120 X 軸
軸連動機能
軸連動機能とは、ある軸に他の軸の指令位置(出力
パルス)か、実位置(入力パルス)を加減算して制御
する機能です。
Y ガントリー制御 POT トリガー入力ドライブ機能 タイミング出力機能
X ワーク台
ガントリー制御を基本機 HOME 汎用入力をトリガー信号として使用し、前もって設定した 指定した位置やタイミングで、出力信号を発信します。この機能はストロボ
能として搭載しました。 動作を行います。この機能はドライブスタート、同期スタート やカメラシャッター、センサー機器などのON/OFFに使用できます。
軸連動機能を応用し、Y2 などで使用できます。
コンベア方向 エンコーダ 軸をY1軸に連動設定して
Y1軸単体に対し指令を発 Y1 Y2
行するだけでY2軸が自動
ワーク台(XYZ軸など)をコンベアのエンコーダ情報 X トリガー信号
に追従します。
に連動させることで、コンベアを停止させることなく NOT
作業することができます。 モータドライブ 動作範囲(パルスカウンタ)
17 18
速度(V)
速度(V)
Y軸(pulse)
Y軸(pulse)
Page3
MOTOR CONTROLLER MOTOR CONTROLLER
Realtime Express EtherCAT
PXRP-3216CN / CSRC-32CN-RP PCPG-168N-V / PCMC-168N / CPLM-3P2X16EPN--CYNE
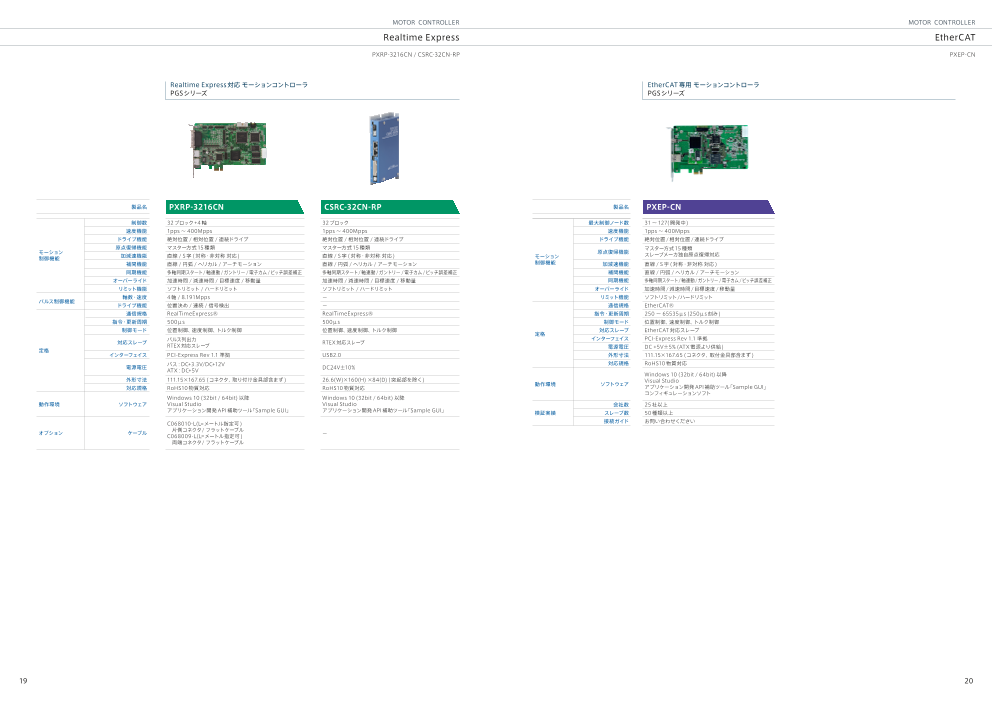
Realtime Express対応 モーションコントローラ EtherCAT専用 モーションコントローラ
PGSシリーズ PGSシリーズ
製品名 PXRP-3216CN CSRC-32CN-RP 製品名 PXEP-CN
制御数 32ブロック+4軸 32ブロック 最大制御ノード数 31~127(開発中)
速度機能 1pps~ 400Mpps 1pps~ 400Mpps 速度機能 1pps~ 400Mpps
ドライブ機能 絶対位置 / 相対位置 / 連続ドライブ 絶対位置 / 相対位置 / 連続ドライブ ドライブ機能 絶対位置/相対位置/連続ドライブ
原点復帰機能 マスター方式15種類 マスター方式15種類 マスター方式15種類
モーション 原点復帰機能
制御機能 加減速機能 直線 / S字 (対称・非対称 対応) 直線 / S字 (対称・非対称 対応) モーション スレーブメーカ独自原点復帰対応
補間機能 直線 / 円弧 / ヘリカル / アーチモーション 直線 / 円弧 / ヘリカル / アーチモーション 制御機能 加減速機能 直線 / S字 (対称・非対称 対応)
同期機能 多軸同期スタート/軸連動/ガントリー/電子カム/ピッチ誤差補正 多軸同期スタート/軸連動/ガントリー/電子カム/ピッチ誤差補正 補間機能 直線 / 円弧 / ヘリカル / アーチモーション
オーバーライド 加速時間 / 減速時間 / 目標速度 / 移動量 加速時間 / 減速時間 / 目標速度 / 移動量 同期機能 多軸同期スタート/軸連動/ガントリー/電子カム/ピッチ誤差補正
リミット機能 ソフトリミット / ハードリミット ソフトリミット / ハードリミット オーバーライド 加速時間/減速時間/目標速度/移動量
軸数・速度 4軸 / 8.191Mpps - リミット機能 ソフトリミット/ハードリミット
パルス制御機能
ドライブ機能 位置決め / 連続 / 信号検出 - 通信規格 EtherCAT®
通信規格 RealTimeExpress® RealTimeExpress® 指令・更新周期 250 ~ 65535μs (250μs刻み)
指令・更新周期 500μs 500μs 制御モード 位置制御、速度制御、トルク制御
制御モード 位置制御、速度制御、トルク制御 位置制御、速度制御、トルク制御 対応スレーブ EtherCAT対応スレーブ
定格
対応スレーブ パルス列出力 インターフェイス PCI-Express Rev 1.1 準拠
RTEX対応スレーブ RTEX対応スレーブ
電源電圧 DC +5V±5% (ATX電源より供給)
定格
インターフェイス PCI-Express Rev 1.1 準拠 USB2.0 外形寸法 111.15×167.65 (コネクタ,取付金具部含まず)
電源電圧 バス:DC+3.3V/DC+12V 対応規格 RoHS10物質対応
ATX:DC+5V DC24V±10%
Windows 10 (32bit / 64bit) 以降
外形寸法 111.15×167.65 (コネクタ,取り付け金具部含まず) 26.6(W)×160(H) ×84(D) (突起部を除く)
ソフトウェア Visual Studio
動作環境
対応規格 RoHS10物質対応 RoHS10物質対応 アプリケーション開発API補助ツール「Sample GUI」
コンフィギュレーションソフト
Windows 10 (32bit / 64bit) 以降 Windows 10 (32bit / 64bit) 以降
動作環境 ソフトウェア Visual Studio Visual Studio 会社数 25社以上
アプリケーション開発API補助ツール「Sample GUI」 アプリケーション開発API補助ツール「Sample GUI」 検証実績 スレーブ数 50種類以上
C068010-L(L=メートル指定可) 接続ガイド お問い合わせください
オプション ケーブル 片側コネクタ/ フラットケーブル
C068009-L(L=メートル指定可) -
両端コネクタ/ フラットケーブル
19 20
Page4
MOTOR CONTROLLER
Realtime Express
CTDR-0514NS-4LS / CTAD-08NSB / CTADA-44NS
CTI-16NSW / CTI-32NS / CTO-16NSW / CTO-32NS
RealtimeExpress RealtimeExpress
4軸一体型5相ステッピングドライバ CTDR-0514NS-4LS RealtimeExpress
16点入力ボード CTI-16NSW 32点入力ボード CTI-32NS
制御モード PP制御/4ブロック 占有ブロック数 1ブロック 占有ブロック数 1ブロック
直線/S字加減速(非対称対応) 汎用入力 フォトカプラによる絶縁入力 16点 汎用入力 フォトカプラによる絶縁入力 32点
PP制御機能 速度変更/移動量変更(動作中変更可能) コネクタ 12ピン×4 WAGO社製733シリーズ コネクタ 12ピン×8 WAGO社製733シリーズ
直線補間/円弧補間/連続補間 絶縁用外部電源 DC12V-0%~24V+10% 絶縁用外部電源 DC12~24V
駆動電流 0.35A/相 ,0.75A/相 ,1.4A/相 選択可能 入力電流 2mA~5mA 入力電流 2mA~5mA
マイクロステップ駆動方式 電源電圧 DC+24V±10% 電源電圧 DC+24V±10%
駆動方式 1,2,4,5,8,10,16,20,25,40,50,80,100,125,200,250 消費電流 70mA 消費電流 70mA
最高周波数 500kpps(kHz) 外形寸法(mm) 86(W)×75(D)×34.1(H) 外形寸法(mm) 90(W)×160(D)
冷却方式 自然対流空冷方式 オプション CTI-16NSW/C オプション CTI-32NS/C
制御入力 ±リミット / 原点信号 / 非常停止 基板保護カバー付き CTI-32NS専用基板保護カバー付き
電源/消費電流 DC+24V±10% / Max.10A
外形寸法(mm) 88(W)×146(D)×113(H)
対応モータ 0.35A,0.75A,1.4A/相の5本/10本リードモータ
付属品 電源/モータ/入出力コネクタ/コンタクト
RealtimeExpress CTAD-08NSB RealtimeExpress RealtimeExpress RealtimeExpress
AD変換ボード AD/DA変換ボード CTADA-44NS 16点出力ボード CTO-16NSW 32点出力ボード CTO-32NS
占有ブロック数 2ブロック 占有ブロック数 2ブロック 占有ブロック数 1ブロック 占有ブロック数 1ブロック
入力ch数 8ch 入出力ch数 4ch/4ch 出力信号 トランジスタによるオープンコレクタ出力 16点 出力信号 トランジスタによるオープンコレクタ出力 32点
入力レンジ -10V~+10V、-5V~+5V( 切替え) 入力レンジ 0~+10V、0~+5V(切り替え) 出力形態 シンク型 出力形態 シンク型
入力電圧範囲 ±11V 入力電圧範囲 ±11V 出力電流/耐圧 Max.100mA/Max.50V 出力電流/耐圧 Max.100mA/Max.50V
入力インピーダンス 1MΩ 入力インピーダンス 1MΩ アイソレーション DC12V-0%~24V+10% アイソレーション DC12V-0%~24V+10%
分解能 12bit 出力電流 5mA コネクタ 12ピン×4 WAGO社製733シリーズ コネクタ 12ピン×8 WAGO社製733シリーズ
ADコンバータ AD7923(相当品) 出力レンジ ユニポーラ:0~+5V,0~+10V タイムアウト時出力 全点出力の保持or全点出力OFF タイムアウト時出力 全点出力の保持or全点出力OFF
電源電圧 DC+24V±10% 分解能 12bit 電源電圧 DC+24V±10% 電源電圧 DC+24V±10%
消費電流 Max.120mA AD/DAコンバータ AD7923/AD5724(相当品) 消費電流 Max.100mA 消費電流 170mA
周囲温度・湿度 0 ~ 45℃・10 ~ 80%RH 電源電圧 DC+24V±10% 外形寸法(mm) 86(W)×75(D)×34.1(H) 外形寸法(mm) 90(W)×160(D)
対応規格 RoHS10物質対応 消費電流 160mA(Typ)
オプション CTO-16NSW/C オプション CTO-32NS/C
外形寸法 128g・115(W)×86(D)(mm) 周囲温度・湿度 0 ~ 45℃・10 ~ 80%RH 基板保護カバー付き 基板保護カバー付き
対応規格 RoHS10物質対応
外形寸法 130g・115(W)×86(D)(mm)
21 22
Page5
MOTOR CONTROLLER MOTOR CONTROLLER
Realtime Express EtherCAT
CTTO-04NS CTAD-08NCTSDB R/ -C0T5A1D4EAS-4-24LNSS / /C CTTDDRR-0-0551144EESS-4-4LLS
RealtimeExpress EtherCAT EtherCAT
高速デジタルタイミングIOボード CTTO-04NS 2軸一体型5相ステッピングドライバ CTDR-0514ES-2LS 4軸一体型5相ステッピングドライバ CTDR-0514ES-4LS
チャンネル数 1ch ~ 4ch 制御モード I/O制御 制御モード I/O制御
出力方式 差動出力、TTL出力 直線 / S字加減速(非対称) 直線 / S字加減速(非対称)
タイミング出力回路
出力時間設定/単位 1 ~ 2,147,483,647μ / 1μ モーション制御機能 速度変更 / 移動量変更(動作中変更可能) モーション制御機能 速度変更 / 移動量変更(動作中変更可能)
出力遅延時間 最大120ns (typ 100ns) 直線補間 / 円弧補間 / 連続補間 直線補間 / 円弧補間 / 連続補間
ストロボ制御信号 点数 CMOS入力4点 駆動電流 0.35A,0.75A/相 ,1.4A/相 選択可能 駆動電流 0.35A,0.75A/相 ,1.4A/相 選択可能
点数 オープンコレクタ(LS06)4点
駆動方式 マイクロステップ駆動方式
1,2,4,5,8,10,20,40,80,16,25,50,100,125,200,250 駆動方式 マイクロステップ駆動方式
電流/電圧 最大30mA/点・最大30V 1,2,4,5,8,10,20,40,80,16,25,50,100,125,200,250
ストロボ用カプラ 内部電源+24V/12V・外部電源(ジャンパ切替) 最高周波数 500kpps(kHz) 最高周波数 500kpps(kHz)
ストロボ出力回路
フォトカプラ供給電流 最大80m/A(全点合計) 冷却方式 自然対流空冷方式 冷却方式 自然対流空冷方式
ON:最大10μs(typ 40ns) カレントダウン 駆動停止後、モータ電流を自動的に約50%にダウン カレントダウン 駆動停止後、モータ電流を自動的に約50%にダウン
出力遅延時間 OFF:80μs(typ 220ns) 制御入力 ±リミット / 原点信号 / 非常停止 制御入力 ±リミット / 原点信号 / 非常停止
点数 フォトカプラ 2点 電源/消費電流 DC+24V±10% / Max.6A 電源/消費電流 DC+24V±10% / Max.10A
センサー入力回路
入力抵抗/入力電流 4.7kΩ・4.8mA/点 外形寸法(mm) 58(W)×146(D)×112(H) 外形寸法(mm) 76(W)×146(D)×112(H)
電源/消費電流 DC+24V±10%・最大120mA 対応モータ 0.35A,0.75A,1.4A/相の5本/10本リードモータ 対応モータ 0.35A,0.75A,1.4A/相の5本/10本リードモータ
画像信号 DC5 V± 10% 付属品 電源/モータ/入力用コネクタ、コンタクト 付属品 電源/モータ/入力用コネクタ、コンタクト
定格
対応規格 RoHS10物質対応
外形寸法(mm) 150(W)×128(D)×32(H)
オプション CTTO-04NS/C CTTO-04NS専用基板保護カバー付き
23 24