


このカタログについて
| ドキュメント名 | Photonfocus社3Dカメラ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 2.5Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社アプロリンク (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ



このカタログの内容
Page1
レーザー 3D計測ソリューション
リアルタイム 3D情報検出カメラ
Page2
3D データ演算処理機能搭載
レーザー 3D計測用 CMOS高速カメラ
MV1-D2048/1312/1024 シリーズ
全モデル共通:
・3D データ演算処理機能
(カメラ内の FPGA で演算処理を行います。)
・PF 3D Suite GUI 付属
(カメラ制御用 GUI。点群データ等を確認できます。)
・グローバルシャッター CMOS
・サポート OS Windows
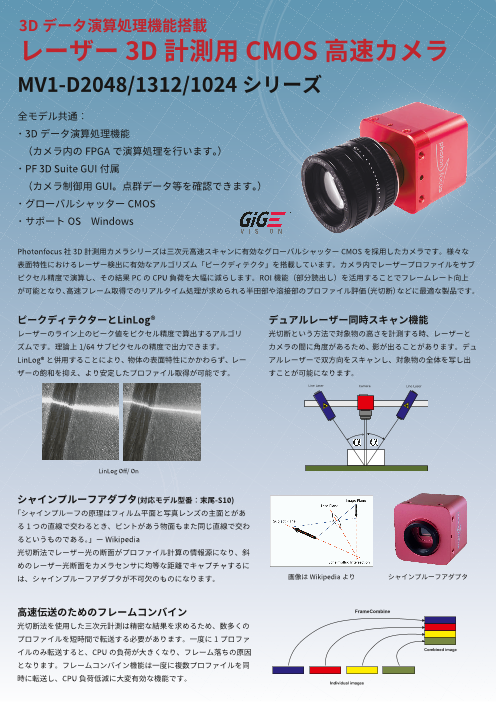
Photonfocus 社 3D 計測用カメラシリーズは三次元高速スキャンに有効なグローバルシャッター CMOS を採用したカメラです。様々な
表面特性におけるレーザー検出に有効なアルゴリズム「ピークディテクタ」を搭載しています。カメラ内でレーザープロファイルをサブ
ピクセル精度で演算し、その結果 PC の CPU 負荷を大幅に減らします。ROI 機能(部分読出し)を活用することでフレームレート向上
が可能となり、高速フレーム取得でのリアルタイム処理が求められる半田部や溶接部のプロファイル評価(光切断)などに最適な製品です。
ピークディテクターとLinLog® デュアルレーザー同時スキャン機能
レーザーのライン上のピーク値をピクセル精度で算出するアルゴリ 光切断という方法で対象物の高さを計測する時、レーザーと
ズムです。理論上 1/64 サブピクセルの精度で出力できます。 カメラの間に角度があるため、影が出ることがあります。デュ
LinLog® と併用することにより、物体の表面特性にかかわらず、レー アルレーザーで双方向をスキャンし、対象物の全体を写し出
ザーの飽和を抑え、より安定したプロファイル取得が可能です。 すことが可能になります。
LinLog Off/ On
シャインプルーフアダプタ(対応モデル型番:末尾-S10)
「シャインプルーフの原理はフィルム平面と写真レンズの主面とがあ
る 1 つの直線で交わるとき、ピントがあう物面もまた同じ直線で交わ
るというものである。」ー Wikipedia
光切断法でレーザー光の断面がプロファイル計算の情報源になり、斜
めのレーザー光断面をカメラセンサに均等な距離でキャプチャするに
は、シャインプルーフアダプタが不可欠のものになります。 画像は Wikipedia より シャインプルーフアダプタ
高速伝送のためのフレームコンバイン
光切断法を使用した三次元計測は精密な結果を求めるため、数多くの
プロファイルを短時間で転送する必要があります。一度に 1 プロファ
イルのみ転送すると、CPU の負荷が大きくなり、フレーム落ちの原因
となります。フレームコンバイン機能は一度に複数プロファイルを同
時に転送し、CPU 負荷低減に大変有効な機能です。
Page3
CameraLink
Frame Grabber
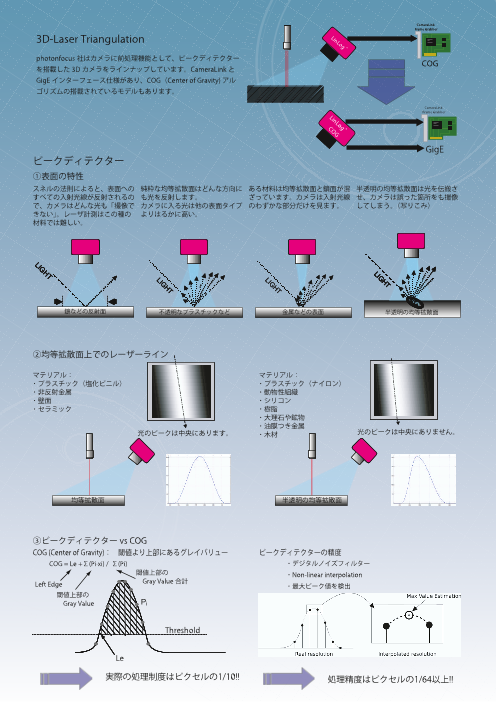
3D-Laser Triangulation LLininLLoogg ®®
photonfocus 社はカメラに前処理機能として、ピークディテクター
COG
を搭載した 3Dカメラをラインナップしています。CameraLink と
GigE インターフェース仕様があり、COG(Center of Gravity) アル
ゴリズムの搭載されているモデルもあります。
CameraLink
Frame Grabber
LinL
C oO g ®G
GigE
ピークディテクター
①表面の特性
スネルの法則によると、表面への 純粋な均等拡散面はどんな方向に ある材料は均等拡散面と鏡面が混 半透明の均等拡散面は光を伝搬さ
すべての入射光線が反射されるの も光を反射します。 ざっています。カメラは入射光線 せ、カメラは誤った箇所をも撮像
で、カメラはどんな光も「撮像で カメラに入る光は他の表面タイプ のわずかな部分だけを見ます。 してしまう。(写りこみ)
きない」。レーザ計測はこの種の よりはるかに高い。
材料では難しい。
LIGHT LL L IGIG IG HHT H
T
T
鏡などの反射面 不透明なプラスチックなど 金属などの表面 半透明の均等拡散面
②均等拡散面上でのレーザーライン
マテリアル: マテリアル:
・プラスチック(塩化ビニル) ・プラスチック(ナイロン)
・非反射金属 ・動物性組織
・壁面 ・シリコン
・セラミック ・樹脂
・大理石や鉱物
・油膜つき金属
光のピークは中央にあります。 ・木材 光のピークは中央にありません。
均等拡散面 半透明の均等拡散面
③ピークディテクター vs COG
COG (Center of Gravity): 閾値より上部にあるグレイバリュー ピークディテクターの精度
COG = Le +∑(Pi·xi) / ∑(Pi) ・デジタルノイズフィルター
閾値上部の ・Non-linear interpolation
Left Edge Gray Value 合計 ・最大ピーク値を検出
閾値上部の
Gray Value Pi
Threshold
Le
実際の処理制度はピクセルの1/10!! 処理精度はピクセルの1/64以上!!
Page4
ノイズがない場合 ノイズががある場合
均等拡散面 CCOOGG && PPeeaakk 均等拡散面
不透明な均等拡散面
不透明な均等拡散面 COGCOG Peak
PeakDetectorとCOGの比較: モードセッティング
どのようなデータをフレームグラバーへ転
送するかによりモードを設定します。
①2Dモード
Rawイメージデータを転送します。この場
合、フレームグラバーあるいは、ソフトウ
ェアによる画像処理が必要です。
②2D/3Dモード
Rawイメージデータと必要な3D情報を転送
します。3D情報は、2DRawデータに追加さ
れ転送されます。
※1本のレーザーラインプロファイル情報と
なります。
③3Dモード
Rawデータより算出した3D情報を転送しま
す。
パラメーター相互関係:
ある程度の分解能を出すために、それな カメラはレーザーラインのズレ距離によ レンズの拡大率は高さ方向と幅方向の分
りのプロファイル数が必要です。スキャ って高さ情報を計算していますので、各 解能を決めます。
ンスピードを固定すると、フレームレー 方向に同じ分解能とすると、45°はベス
トを上げる必要があります。 トです。レンズの拡大率は高さ方向と幅
方向の分解能を決めます。
ROIとフレームレート
ある程度のフレームレートを出すために、露光
時間を短くする必要があります。
ピークを検知できる条件で露光時間を短くする
ため、より明るいレンズが必要です。
Page5
PF3Dsuite:
PF 3D Suiteはメインウィンドウ、いくつかの二次的なウィンドウ、そし
てコンフィグレーションダイアログから成り立っており、メインウィン
ドウはカメラから取得したフレームを表示します。 ヒストグラムウィン
ドウ、レンジマップウィンドウ、サーフェースウィンドウ、ズームウィ
ンドウはそれぞれの付加情報を表示します。 コンフィグレーションダイ
アログで、取得とカメラのパラメーターを設定します。ステータスバー
でフレームレートを表示します。この番号は処理したフレームの数を表
示します。 メインウィンドウは一番近い取得したカメラフレームを表示
します。ツールバーはよく使われるボタンをリストアップしています。
操作画面
RangeMap SurfaceMap
※上図はモノ映像ですが、実際カメラから出力される2Dデータ(RangeMap)と3Dデータ(SurfaceMap)は高さ情報は色分けされて
おり、一番高い位置から低い位置へ「赤」から「青」で表現されています。
Trigger Resolution:
3Dイメージ取得するには、エンコーダーパルスの使用は重要で
す。イメージキャプチャタイミングを精密に設定するため、ト
リガーパルス頻度とイメージキャプチャ頻度の比率を調節する
必要がある場合、TriggerResolutionを設定します。
TriggerResolutionの値は、1回のキャプチャにあたり、スキップ TriggerResolutionを2に設定した場合
するトリガーパルスの数です。例えば、TriggerResolutionを2に
設定した時、2つのパルスをスキップして、3番目のパルスでキ
ャプチャします。
PF3DLib:
PF3DLibは3DマシンビジョンシステムのOEM、システム統合、最大適応性とカスタマ
イズ性能が必要とされるエンドユーザー使用には最適です。
PF3DLibでは全ての3DビジョンアルゴリズムをPF3Dlibアプリケーションに取り入れる
ことができます。
PF3DLibの主な特性は:
・大部分のC++コンパイラーに簡単に使用できる
・フレームグラバードライバーの使用でハードウェア取得の独立
・開放式アーキテクチャー
・拡張オンラインドキュメンテーション
3D情報データ構成:
MV-D1024E-3D01-160-CLの場合、1行ごとに8バイトの3D情報があり
ます。よって、4バイト目の「RESERVED」が「QUAL」の拡張部分に
なる場合もあります。
各バイトの説明
「PEAK」 : 2バイト、ピーク座標です。2D画像によって、算出した
ピークの座標です。[15:6] 部分は整数で、[5:0] は小数部
分です。
「WIDTH」 : 1バイト、レーザーライン幅です。このバイトの[7:2]部
分は整数で、 [1:0]は小数部分です。
「QUAL」 : 1バイトまたは2バイト、レーザーラインの最大輝度値
です。
※grはグレースケールのビット数です。
※8bit:QUAL[7:0] 10bit:QUAL[9:0] 12bit:QUAL[11:0]
PEAK[15:8] PEAK[7:0] WIDTH[7:0] QUAL[ 15:8 ] QUAL[7:0] RESERVED RESERVED RESERVED
0 1 2 3 4 5 6 7
Page6
主なクラス機能紹介:
pf3dlib::Frame メモリ上で2Dイメージを管理するクラス
pf3dlib::FrameGrabber PF3DLibフレームグラバードライバーのインタフェース
pf3dlib:: PeakFinder Frameオブジェクトから3D情報を取り出します。
pf3dlib:: Profile Frameオブジェクトで探し出したレーザーストライプ位置
pf3dlib::RangeMap Profile蓄積をベースした3Dモデル
pf3dlib::RangeMap::MetricConfig メートル法キャリブレーションの取得システムコンフィグレーション
カメララインナップ
高速シングル・デュアルスキャン対応 3D計測用カメラシリーズ仕様
MV1-D2048x1088-3D03-760-G2(-S) MV1-D2048-3D04-760-G2 MV1-D1280-L01-3D05-1280-G2
解像度(ピクセル) 200 万画素 CMOS 400 万画素 CMOS 130 万画素 CMOS
2048×1088 2048×2048 1280×1024
センササイズ(mm) 2/3” ( 対角 12.8) 1” ( 対角 15.9) 2/3” ( 対角 10.82)
ピクセルサイズ(µm) 5.5×5.5 5.5×5.5 6.6×6.6
インターフェース GigE Vision GigE Vision GigE Vision
フル画面での最大 FPS: 360fps@2048x1088 180fps@2048x2048 948fps@1280x1024
ROI 設定により最大 FPS: 10200fps@2048x23 7700fps@2048x23 43700fps@1280x16
レーザー認識 ピークディテクター ピークディテクター COG
デュアルピーク機能 X X X
HDR 機能 Multislope Multislope Multislope
寸法(W x H x Dmm)/ 重量 55 x 55 x 52/ 265 55x 55 x 52/ 265 55x 55 x 51/ 258
消費電力(W) <6 <6 <8.7
ハイダイナミックレンジ 3D計測用カメラシリーズ仕様
MV1-D1312-3D02-160-G2 MV1-D1024E-3D02-160-G2 MV-D1024E-3D01-160-CL
解像度(ピクセル) 140 万画素 CMOS 100 万画素 CMOS 100 万画素 CMOS
1312×1082 1024×1024 1024×1024
センササイズ(mm) 1” ( 対角 13.6) 1” ( 対角 15.4) 1” ( 対角 15.4)
ピクセルサイズ(µm) 8×8 10.6×10.6 10.6×10.6
インターフェース GigE Vision GigE Vision CameraLink
フル画面での最大 FPS: 114fps@1312x1082 150fps@1024x1024 150fps@1024x1024
ROI 設定により最大 FPS: 3900fps@1312x20 3900fps@1024x20 1600fps@1024x20
レーザー認識 ピークディテクター ピークディテクター ピークディテクター
デュアルピーク機能 X X X
HDR 機能 LinLog LinLog LinLog
寸法(W x H x Dmm)/ 重量 60 x 60 x 51/ 310 55x 55 x 49/ 260 55x 55 x 40/ 210
消費電力(W) <5.0 <4.8 <3.2
※仕様は予告無く変更する場合があります。
株式会社アプロリンク
〒273-0025 千葉県船橋市印内町 568-1-2
TEL: 047-495-0206 FAX:047-495-0270
WEB :www.aprolink.jp
お問合せ先 :sales@aprolink.jp 2017.3