




吸着搬送・研削・研磨・ねじ締めなど様々な作業を自動化に!
当カタログは、日東工器が取り扱う自動機対応製品を掲載しております。
20mm幅ベルトは曲線部のバリ取りに好適な「ベルトン」をはじめ、
1台で最大30通りのトルク設定が可能な電動ドライバ「ブラシレスデルボ
Cシリーズ 型式 DLV45C」など多様な製品をご紹介しております。
それぞれの製品の活用事例動画もご用意しておりますので
ぜひ下記動画をご覧ください。
【掲載製品】
■空気式ベルトサンダ「ベルトン」 型式:B-20CL-01
■空気式ダイグラインダ「エアソニック」 型式:L-35C-02
■デュアルアクションエアサンダ「オービタルサンダー」 型式:APS-125-01
■迅速流体継手「カプラ」
■電動ドライバ「デルボ」 型式:DLV04C/DLV10C/DLV45C
※詳しくはPDF資料をご覧いただくか、お気軽にお問い合わせ下さい。
関連メディア
このカタログについて
| ドキュメント名 | 【活用事例集】吸着搬送・研削・研磨・ねじ締めなど様々な作業を自動化に!自動機対応ロボット搭載製品 |
|---|---|
| ドキュメント種別 | 事例紹介 |
| ファイルサイズ | 11.2Mb |
| 取り扱い企業 | 日東工器株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
X02-d
自動機対応
ロボット搭載製品
ロボット搭載で作業を自動化。
省人化、無人化を実現。
×協働ロボット搭載例
×産業ロボット搭載例
×自動機搭載可能シリーズ
×協働ロボット活用例
webサイト
Page2
真空ポンプ内蔵で
コンプレッサエア不要
特設HP 製品動画
ロボット用エンドエフェクタ 電動吸着ハンド e-VEE®
[特長]
・省エネ:圧力センサによりポンプが自動停止
・静音:エア吐出音なし
・真空保持機能:ポンプ自動停止時にバルブにより真空保持
・クリーン:外部エア流入なし
・どこでも使用可能:コンプレッサエア不要
・入出力信号方式:PNP/NPN 選択
・簡単接続:ホース取り回しが不要
仕 様
最高真空圧 kPa {mmHg} -66.6{-500}
吐出空気量 L/min 7.5
定格電圧 V DC24
消費電力 W 14.4 ※1
消費電力量 kWh 0.014
サイズ※突起部分除く 104(W)×96(D)×80(H)
型式 EVE-500-KOM
EVE-500-NK EVE-500-KO
本体質量 kg
本体のみ mm 0.92 0.94
取付け時 1.08 1.13
入出力信号方式 PNP方式/NPN方式
コンプレッサ イーヴィー ユニット接続 ISOメカニカルインターフェイス4
+ 入出力信号方式
エジェクタ EVE-500 P AT .P D .PA T 取付方法 PNP NPN
ねじ込み式 ツールフランジ EVE-500-NK-PNP EVE-500-NK-NPN
マニュアル マスターシリンダ
+
ツールアダプタ EVE-500-KOM-PNP EVE-500-KOM-NPN
コンプレッサ ロボットハンド
チェンジャー ツールアダプタ
エア不要 のみ EVE-500-KO-PNP EVE-500-KO-NPN
活用事例
1 倉庫 2 食品工場 3 農業分野
イーヴィー 電力削減率
MAX
※1 最大※2, 3
消費電力 14.4W
消費電力量 0.014kWh
※1 使用時の瞬間最大値 77% コラボ製品
※2 同能力のエジェクタとの比較
※3 エジェクタ1台当たりの使用空気量 [13 L/min]
マニュアル
ロボットハンド
チェンジャー
株式会社コスメック製
コラボ製品
どちらか選択して
取り付け可能
吸着ハンド
ねじ込み式
取付けフランジ
日東工器製
1
Page3
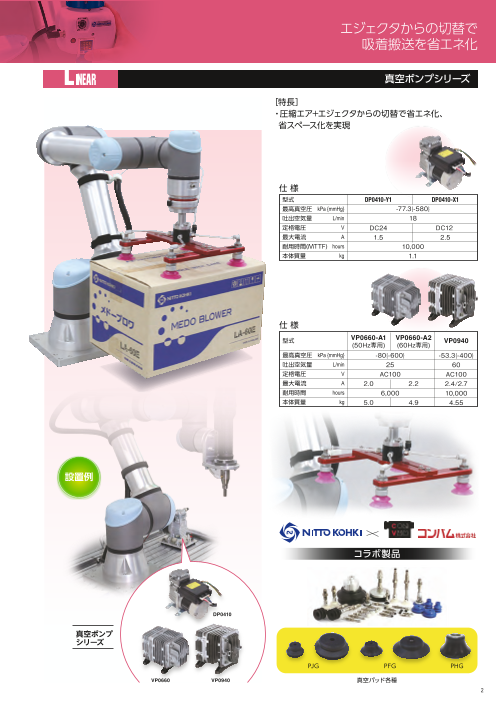
エジェクタからの切替で
吸着搬送を省エネ化
真空ポンプシリーズ
[特長]
・圧縮エア+エジェクタからの切替で省エネ化、
省スペース化を実現
仕 様
型式 DP0410-Y1 DP0410-X1
最高真空圧 kPa {mmHg} -77.3{-580}
吐出空気量 L/min 18
定格電圧 V DC24 DC12
最大電流 A 1.5 2.5
耐用時間(MTTF) hours 10,000
本体質量 kg 1.1
仕 様
型式 VP0660-A1 VP0660-A2
(50Hz専用) (60Hz専用) VP0940
最高真空圧 kPa {mmHg} -80{-600} -53.3{-400}
吐出空気量 L/min 25 60
定格電圧 V AC100 AC100
最大電流 A 2.0 2.2 2.4/2.7
耐用時間 hours 6,000 10,000
本体質量 kg 5.0 4.9 4.55
設置例
コラボ製品
DP0410
真空ポンプ
シリーズ
PJG PFG PHG
VP0660 VP0940 真空パッド各種
2
Page4
産業ロボットと組み合わせて
自動化を実現
空気式高速多針タガネ ジェットタガネ® JT-16-RBT
[特長] はつり はくり
近日発売 搭載例動画 ・低振動、低反力を実現
・ニードルの束が高速で往複し、効率的なはくり作業を実現
・ニードルの径は作業に応じて、2種類を用意
仕 様
型式 JT-16-RBT
使用空気圧力 MPa(kgf/cm2) 0.6 (6)
空気消費量 m3/min 0.16
打撃数(φ2ニードル使用時) min-1 6000
搭載例 φ2/本
ニードル径と本数 15
φ3/本 6
ニードルの標準長さ mm 180
本体質量 kg 1.8(エアホース含む)
空気式ベルトサンダ ベルトン® B-10-RBT-S
研削・研磨 バリ取り
近日発売 搭載例動画 [特長]
・10mm幅ベルト採用で、細かい箇所の作業が可能
・ベルトのたわみを利用したR面研削が可能
工場での エアツール・
稼働事例 産業ロボット
での事例
仕 様
型式 B-10-RBT-S
使用圧力 MPa(kgf/cm2) 0.4(4)
空気消費量 m3/min 0.28
無負荷回転数 min-1 15000
ベルト速度 m/min 990
本体質量 kg 1.0
コラボ製品
搭載例
ロボットハンドチェンジャー
株式会社コスメック製
3
Page5
産業ロボットと組み合わせて
自動化を実現
空気式ベルトサンダ ベルトン® B-20CL-01
[特長] 研削・研磨 バリ取り
搭載例動画
搭載例 ・ダイカスト製品のバリ取りに
・ベルト幅20mm
・ベルトのたわみを使用した
フローティング フローティング R面研削も可能
あり なし
仕 様
型式 B-20CL-01
使用圧力 MPa(kgf/cm2) 0.6 (6)
空気消費量 m3
エアツール・ /min 0.52
産業ロボット 無負荷回転数 min-1
での事例 18000
ベルト速度 m/min 2770
ベルト寸法 mm 20×520
本体質量 kg 1.6
本体装着ベルト Z #60×20mm
●研磨ベルトZ
#60×20mm、#80×20mm
標準付属品 #100×20mm、#120×20mm:各1本
●六角棒スパナ2.5、4mm:各1本 ●サイレンサ : 1個
●「カプラ」20PM:1個 ●オフセットブラケット20Ass’y:1個
空気式ダイグラインダ エアソニック® L-35C-02
[特長] 研削・研磨 バリ取り
搭載例動画
搭載例 ・ダイカスト製品の研削に
・無負荷回転数37,500min-1
・高速回転で滑らかな仕上がり
仕 様
型式 L-35C-02
使用圧力 MPa(kgf/cm2) 0.6 (6)
空気消費量 m3/min 0.35
無負荷回転数 min-1 37500
チャック径 mm φ6
本体質量 kg 1.1
標準付属品 ●スパナ14mm:2本
デュアルアクションエアサンダ オービタルサンダー APS-125-01
[特長] 表面研磨
搭載例動画
搭載例 ・金属ワークの表面研磨に
・ペーパ径φ125mm
・磨き跡を残さないダブルアクション方式
仕 様
型式 APS-125-01
使用圧力 MPa(kgf/cm2) 0.6 (6)
空気消費量 m3/min 0.45
無負荷回転数 min-1 11000
オービット径 mm φ5
ペーパ外径 mm φ125
本体質量 kg 1.5
●研磨ペーパ #80、#120ベルクロ:各2枚
標準付属品 ●スパナ17mm:1本
●サイレンサ : 1個
●「カプラ」20PM:1個
4
Page6
ロボットとの
高い親和性を発揮
® ブラシレスデルボ® Cシリーズ(電流制御タイプ)DLV45C
DLV45Cが「YASKAWA Plug & Play Kit」に対応
[特長]
搭載例動画 ・トルク電流制御式
・ドライバ1台で30通りのトルク設定が可能
・9段階の回転速度調整機能
ソフト編 システム編 プロモーション ・3段階の自動速度可変機能
・手持ち/自動機両用
[認証製品]
・ブラシレスデルボ® Cシリーズ(電流制御タイプ):DLV45C
・DLV45C専用コントローラ:DCC0241X-AZ
・電源コード:DLW9210
・外部入出力ケーブル:DLW9091
・通信ケーブル(ストレート):DLW9092
・フランジカップリング:DLW9019
・専用フローティングユニット
搭載例
締め付け方向の
位置ずれを吸収 ®
×
YASKAWA
専用フローティングユニット Plug & Play Kit
システム構成例
特設サイト
仕 様
型式 ビット DLV45C12L-AZ K DLV45C12P-AZ K 型式 DCC0241X-AZ
スタート方式 レバースタート プッシュスタート 入力電源 AC100V~240V 50/60Hz
入力電源 専用コントローラから供給 出力電圧 DC40V
トルク調整 1~100% 1%刻みで調整 フォトカプラ入力
トルク N・m 0.6~4.5 コ入力信号方式 (DC24V駆動(5mA/1入力)、
min-1 400~1200 ン NPN/PNP切り替え可)
SOFT締め
無負荷回転速度 回転速度レベル 9段階 ト
ロ フォトカプラ出力
min-1 100~700 ー出力信号方式 (DC30V以下、80mA/1出力以下、
HARD締め 回転速度レベル トルク設定に応じて自動的に決定 ラ NPN/PNP切り替え可)
電
動消費電力 W 44 サービス電源 DC24V(容量最大 200mA)
ド
ラ適合ねじ mm 小ねじ 3.0~6.0 シリアル信号方式 RS-232C
イ タッピンねじ 2.5~5.0 ESD保護(帯電防止性能) 有り(国際静電気規格 IEC61340-5-1適合)
バ 本体質量 kg 1.8
適合ビット mm 電源コード(別売品) 3ピンプラグ アース付き(2m)DLW9210
9 6.35
23 ●注意点
・回転速度や出力は温度によって変化します。(10℃~40℃の範囲でご使用ください)
本体質量 kg 0.63 ・締め付けが完了したねじへの増し締めは、高いトルクが印加されるため、おやめください。
定格運転 ON時間0.5秒 / OFF時間3.5秒 ・コントローラ(DCC0241X-AZ)用の電源コード(DLW9210)は別売です。
ビットアース 有り ・トルク測定は、弊社のトルクチェッカ(別売)とソフトジョイント/ハードジョイント(別売)
ビットNK35(No.2×7×75):1本 をご使用ください。
標準付属品 接続コード2m (DLW9078):1本
吊金具:1個
5
φ7
Page7
ロボットとの
高い親和性を発揮
® ブラシレスデルボ® Cシリーズ(電流制御タイプ)DLV45C
DLV45Cが「UR+適合」を取得
搭載例動画
[特長]
・URCap(「デルボ」専用ソフト)対応
・ドライバ1台で最大30通りのトルク設定が可能
「デルボ」設定編 トレーサビリティ編
・9段階の回転速度調整機能
・3段階の自動速度可変機能
特設サイト [認証製品]
・ブラシレスデルボ® Cシリーズ(電流制御タイプ):DLV45C
・DLV45C用コントローラ:DCC0241X
※詳しくは、カタログ、取扱説明書をご参照ください。
※ロボットへの取付方法、通信方法はユーザーマニュアルをご参照ください。
搭載例 無負荷回転速度 : SOFT締め400~1200min-1, HARD締め100~700min-1
トルク幅 : 0.6~4.5 N・m
® ブラシレスデルボ® Cシリーズ(電流制御タイプ)DLV04C/DLV10C/DLV45C
DLV04C/DLV10C/DLV45Cが「Plug&Play認証」を取得
[特長]
搭載例動画 DLV04C/DLV10C
DLV45C ・ドライバ1台で4通りのトルク設定が可能
DLV45C
・ドライバ1台で最大30通りのトルク設定が可能
・3段階の自動速度可変機能
[認証製品]
・ブラシレスデルボ® Cシリーズ(電流制御タイプ):
DLV04C/DLV10C/DLV45C
・DLV04C/DLV10C用コントローラ:DCC0101X
・DLV45C用コントローラ:DCC0241X
DLV04C/DLV10C
無負荷回転速度 : SOFT締め600~1,000min-1, HARD締め100~1,000min-1
トルク幅 : 0.05~1.0 N・m
搭載例 DLV45C
無負荷回転速度 : SOFT締め400~1,200min-1, HARD締め100~700min-1
特設サイト トルク幅 : 0.6~4.5 N・m
® 自動機搭載可能「デルボ」ロボット搭載例
搭載例動画 搭載例動画 搭載例動画
DLV04C Aシリーズ
DLV10C DLV45C Aシリーズ
無負荷回転速度 : SOFT締め650~2,000min-1
HARD締め100~700min-1
トルク幅 : 0.40~7.0N・m
6
Page8
「カプラ」の接続・分離を自動化し、
配管周りの省力・省人化が可能に
迅速流体継手「カプラ」
[特長]
搭載例動画 ・接続ミスをなくし段取りの自動化を実現
・「カプラ」接続を効率的かつ安全に
活用事例-1 活用事例-2
搭載例
ロボットの力だけでなくエアシリンダを使うことで接続確認が可
能に。自動化によって接続ミスをなくし、配管周りの省力・省人
化に貢献します。
迅速流体継手「カプラ」パイプ用オートカプラ
[特長]
搭載例動画 ・3Dカメラで撮影しやすいよう、把持部分を表面加工
・多少位置ずれしても接続可能なフローティング機構搭載
・接続口がテーパ形状のため、接続が容易
協働ロボットによるパイプ用オートカプラの接続・分離例。 搭載例
パイプ用オートカプラは自動化に適した構造で、協働ロボットと
高い親和性があります。
登録販売店
本社・研究所/東日本支社 ISO 9001
〒146-8555 東京都大田区仲池上2-9-4 Te:l 03-3755-1111(大代表) ISO 14001
西日本支社 JQA-2025
日東会会員章
〒537-0001 大阪府大阪市東成区深江北2-10-10 Te:l 06-6973-5501(代表) JQA-EM4057
お求めは上記マ-クの 本社/研究所
日東会加盟店で 中日本支社
〒465-0092 愛知県名古屋市名東区社台3-173-2 Te:l 052-726-9041(代表)
支 店: 札幌/仙台/新潟/松本/北関東/東京第一/東京第二/静岡/浜松/三河/名古屋/
北陸/京都/大阪第一/大阪第二/高松/岡山/広島/福岡
海外拠点: アメリカ/ドイツ/イギリス/タイ/インド/シンガポ-ル/インドネシア/オーストラリア/中国
●お客様相談窓口(土・日・祝日を除く)
ホームページ www.nitto-kohki.co.jp 受付時間 AM8:30~PM5:15
0120-210-216
ご注意 正しく安全にお使いいただくため、ご使用の前に必ず「取扱説明書」または「注意書」をよくお読みください。
このカタログの記載内容は2024年6月現在のものです。
改良のため予告なしに変更する場合がありますのでご了承ください。 24F-PDF