このカタログをダウンロードして
すべてを見る



このカタログについて
| ドキュメント名 | ベーンタイプテーブル形 RAG |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 5Mb |
| 関連製品 | |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社コガネイ (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログ(ベーンタイプテーブル形 RAG)の内容
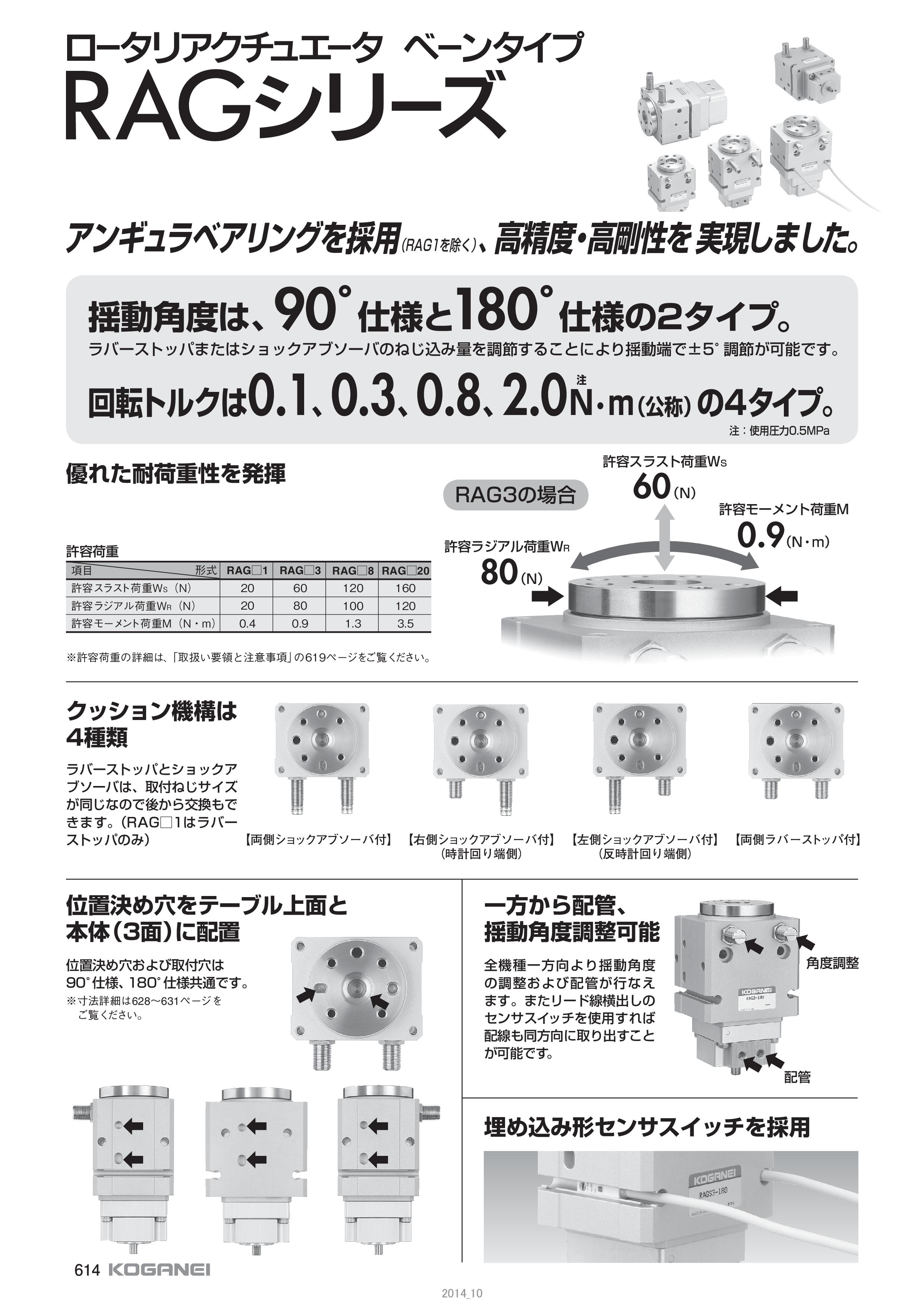
Page 1:揺動角度は、90゜仕様と180゜仕様の2タイプ。ラバーストッパまたはショックアブソーバのねじ込み量を調節することにより揺動端で±5゜調節が可能です。回転トルクは0.1、0.3、0.8、2.0N・m(公称)の4タイプ。埋め込み形センサスイッチを採用位置決め穴をテーブル上面と本体(3面)に配置クッション機構は4種類一方から配管、揺動角度調整可能ラバーストッパとショックアブソーバは、取付ねじサイズが同じなので後から交換もできます。(RAG□1はラバーストッパのみ)位置決め穴および取付穴は90゜仕様、180゜仕様共通です。※寸法詳細は628〜631ページを ご覧ください。全機種一方向より揺動角度の調整および配管が行なえます。またリード線横出しのセンサスイッチを使用すれば配線も同方向に取り出すことが可能です。優れた耐荷重性を発揮許容スラスト荷重WS60(N)許容ラジアル荷重WR80(N)許容モーメント荷重M0.9(N・m)角度調整配管※許容荷重の詳細は、「取扱い要領と注意事項」の619ページをご覧ください。ccccccccccccアンギュラベアリングを採用(RAG1を除く)、高精度・高剛性を実現しました。【両側ラバーストッパ付】【右側ショックアブソーバ付】(時計回り端側)【左側ショックアブソーバ付】(反時計回り端側)【両側ショックアブソーバ付】注注:使用圧力0.5MPaRAG3の場合許容荷重RAG□120200.4RAG□360800.9RAG□81201001.3RAG□201601203.5項目許容スラスト荷重WS(N)許容ラジアル荷重WR(N)許容モーメント荷重M(N・m)形式6142014_10
Page 2:■ベアリングにより、振動や振れを抑え高精度・高剛性。■ワーク取付部は、使いやすいテーブルタイプ。■埋め込み形センサスイッチに対応。ワークをバキュームパッドで吸着し、アームによりオフセット回転させる。ワーク自体を回転させる。ねじをねじ込む(スラスト荷重をかける)90°仕様180°仕様使用例1使用例26152014_10
Page 3:取扱い要領と注意事項一般注意事項1. ロータリアクチュエータに配管する前に、必ず配管内のフラッシング(圧縮空気の吹き流し)を十分に行なってください。配管作業中に発生した切り屑やシールテープ、錆などが混入すると、空気漏れなどの作動不良の原因となります。2.ロータリアクチュエータに配管、継手類をねじ込む場合は、下記の適正締付トルクで締付けてください。配管無給油で使用できますが、給油をする場合には、タービン油1種(ISOVG32)相当品を使用してください。スピンドル油、マシン油の使用は避けてください。潤滑水滴、油滴などがかかる場所で使用する時は、カバーなどで保護してください。雰囲気装置およびロータリアクチュエータの初期作動において、急激に圧縮空気を印加するとロータリアクチュエータの構造上、速度制御が不能となる場合があり、装置およびロータリアクチュエータを破損する可能性があります。圧縮空気の抜けた装置およびロータリアクチュエータに印加する場合は、テーブルを必ず回り切った状態で安全を十分確認してテーブルが動かない方向の配管接続口より印加してください。配管位置と揺動方向は627ページをご覧ください。使用時1. 使用流体は空気を使用し、それ以外の流体の場合は最寄りの弊社営業所へご相談ください。2. ロータリアクチュエータに使用される空気は、劣化したコンプレッサ油などを含まない清浄な空気を使用してください。ロータリアクチュエータやバルブの近くにエアフィルタ(ろ過度40μm以下)を取り付けて、ドレンやゴミを取り除いてください。またエアフィルタのドレン抜きは定期的に行なってください。空気源接続ねじM5×0.8締付けトルク N・cm1576162014_10
Page 4:本体通し穴による取付(パターンB)本体通し穴による取付(パターンA)本体タップ穴による取付本体通し穴による取付(パターンB)本体通し穴による取付(パターンA)本体タップ穴による取付本体通し穴による取付(パターンB)本体通し穴による取付(パターンA)取付1. 取付面は必ず平面としてください。取付時にねじれや曲がりが発生すると、エア漏れや作動不良の原因となります。2. ロータリアクチュエータの取付面に傷や打痕を付けると、平面度を損なうことがありますのでご注意ください。3. 衝撃または振動によるボルトの緩みの恐れがある場合は、緩み止めなどを考慮してください。4. ワークの取り付けはテーブル上面にワーク固定用のねじ穴がありますが、必ずねじ深さ以下となるようなボルトを使用してください。ワーク取付時のねじ締め付けは、制限範囲内のトルク値で締め付けてください。5. テーブル上面の各ねじ穴から、切粉、ゴミなどが侵入しないようにしてください。内部ベアリングに切粉、ゴミなどが付着すると作動不良の原因になります。6. ロータリアクチュエータRAGシリーズは、下記の様な取付けができます。取付時のねじ締め付けは、制限範囲内のトルク値で締め付けてください。取扱い要領と注意事項形式 ねじサイズねじ深さL(mm)最大締付けトルク(N・m)RAG□1RAG□3RAG□8RAG□20M4×0.7M5×0.8682.75.4取付形式 ねじサイズ最大締付けトルク(N・m)RAG□1RAG□3RAG□8RAG□20M3×0.5M4×0.7M4×0.7M4×0.7M5×0.8M5×0.8M5×0.8M6×1.0M6×1.0取付方法通し穴(パターンA)通し穴(パターンB)本体タップ穴通し穴(パターンA)通し穴(パターンB)本体タップ穴通し穴(パターンA)通し穴(パターンB)本体タップ穴 1.142.71.51.55.43.05.49.25.2ワークをボルトなどでテーブルに固定する際は、テーブルまたはワークを保持して行なってください。本体を保持して締付けますと、ストッパ、ラバーストッパ、ショックアブソーバに過大なモーメントが加わり、角度変化につながります。ワーク固定用ねじ穴本体通し穴による取付(パターンA)本体通し穴による取付(パターンB)本体タップ穴による取付6172014_10
Page 5:取扱い要領と注意事項 空気消費量ラバーストッパおよびショックアブソーバの交換要領1. ラバーストッパまたはショックアブソーバを交換する場合は、627ページの揺動角度範囲および揺動方向の図を参考に取り付けてください。テーブル下のストッパが正規の位置に無い場合、揺動角度不良および破損の原因になります。また、ラバーストッパまたはショックアブソーバを取り外した状態で使用しないでください。上記同様に、揺動角度不良および運動エネルギーが吸収できず、ロータリアクチュエータが破損する原因になります。2. ラバーストッパまたはショックアブソーバの固定用ナットを緩めて取り外してください。新しいラバーストッパまたはショックアブソーバをねじ込んで位置を決めたら固定用ナットを締めて固定してください。ナットの締め付けは制限範囲内のトルク値で締め付けてください。揺動角度調節1. ロータリアクチュエータRAGシリーズはラバーストッパ・ショックアブソーバにより、627ページに示す範囲で角度調節ができます。時計回り・反時計回り共、ラバーストッパまたはショックアブソーバを右(時計回り)に回すと揺動角度範囲が狭くなります。角度調節後はナットを締めて固定してください。2. 揺動角度は必ず仕様値内で使用してください。特にショックアブソーバ仕様の場合、仕様値を超えますと荷重方向とショックアブソーバの軸線とがなす偏角度が許容値以上となり、破損する可能性があります。3. 出荷時のラバーストッパまたはショックアブソーバは仮締め状態ですので、使用の際は必ずナットを締めて固定してください。4. ナットの締め付けは制限範囲内のトルク値で締め付けてください。ショックアブソーバ固定用ナットラバーストッパ形式 ナットサイズ 最大締付けトルク(N・m)RAG□1RAG□3RAG□8RAG□20M6×0.75M8×0.75M10×1.00.852.456.37形式内部容積cm3RAG□1RAG□3RAG□8RAG□20 90° 1.4 3.0 7.418.1 180° 1.7 3.8 9.222.7●RAG□10.00500.1MPa使用空気圧力0.2 0.3 0.4 0.5 0.6 0.70.0100.0150.0200.0250.0300.035(ANR)90°180°R/cycle●RAG□30.0100.1MPa使用空気圧力0.2 0.3 0.4 0.5 0.6 0.70.020.030.040.050.0690°180°0.07(ANR)R/cycle●RAG□800.1MPa使用空気圧力0.2 0.3 0.4 0.5 0.6 0.70.050.100.15 180°90°0.20(ANR)R/cycle●RAG□200.1500.1MPa使用空気圧力0.2 0.3 0.4 0.5 0.6 0.70.200.250.300.350.40180°90°0.100.050.45(ANR)R/cycleロータリアクチュエータの1サイクル当りの空気消費量は、次の計算式により求めることができます。Q=2×V×10-3×Q:1サイクル当りの空気消費量[R/cycle(ANR)]V:内部容積(cm3)P:使用空気圧力(MPa)P+0.10130.1013繰り返しの動作で、停止位置がずれる可能性があります。高精度位置決めを要する場合は外部ストッパを設けてください。6182014_10
Page 6:テーブル外周面の振れ量テーブル上面の振れ量モーメント荷重MMWR WR WR WRラジアル荷重スラスト荷重WS WS取扱い要領と注意事項●モーメント荷重によるテーブル変位量●振れ精度:180°揺動によるテーブル変位量●許容荷重●実効トルクRAG□120200.4RAG□360800.9RAG□81201001.3RAG□201601203.5項目 形式許容スラスト荷重WS(N)許容ラジアル荷重WR(N)許容モーメント荷重M(N・m)RAG□1・3・8・200.030.03項目テーブル上面の振れ量テーブル外周面の振れ量(mm)(mm)0.005101520253035400.5 1.0 1.5 2.0 2.5 4.03.0 3.5モーメント荷重 N・mμm変位量RAG□1RAG□8RAG□3RAG□20スラスト荷重ラジアル荷重モーメント荷重ロータリアクチュエータRAGシリーズにプレートを取り付けモーメント荷重を加え、回転中心から100mm離れた位置の変位量を測定する。モーメント荷重によるテーブル変位量モーメント荷重変位量100mmRAG□1N・m0.10.010.1MPa使用空気圧力実効トルク10 0.2 0.3 0.4 0.5 0.6 0.7RAG□3N・m0.10.010.1MPa使用空気圧力実効トルク10 0.2 0.3 0.4 0.5 0.6 0.7RAG□20N・m10.10.1MPa使用空気圧力実効トルク100 0.2 0.3 0.4 0.5 0.6 0.7RAG□8N・m10.10.1MPa使用空気圧力実効トルク100 0.2 0.3 0.4 0.5 0.6 0.7形式上記の値は実測値であり、保証値ではありません。6192014_10
Page 7:●機種の選定方法1. 使用条件の確認下記①〜④を確認します。①揺動角度(90゜または180゜)②揺動時間(s)③印加圧力(MPa)④負荷の形状および材質⑤取付方向(姿勢)2. 揺動時間の確認1−②で確認された揺動時間が仕様の揺動時間調節範囲内であることを確認します。3. トルクサイズの選定(機種の選定)物体を回転させるために必要なトルクTAを求めます。選定負荷および揺動時間は「機種の選定方法」に従って仕様範囲内で選定を行なってください。また、各許容値の8割程度を目安にすることをお奨めします。シリンダ部やガイド部への悪影響を最小限に抑えることができます。1−③で確認された印加圧力で、必要トルクTAが得られる機種を619ページの実効トルク表または線図より選定してください。4. 運動エネルギーの確認運動エネルギーが許容エネルギーを超えますと、アクチュエータの破損を招きます。必ず許容エネルギー以内になるように機種を選定してください。運動エネルギーが大きな場合はショックアブソーバ付(-SS2、-SSR、-SSL)を使用してください。許容運動エネルギーは表1を参照してください。運動エネルギーを求めます。●ラバーストッパ付の場合6. 使用可否の判定4.運動エネルギー、5.負荷率共に満足している場合が使用可能となります。E < Ea負荷率の総和 ≦ 15. 負荷率の確認負荷率の総和が1を超えないことを確認します。許容荷重は表3を参照してください。(荷重方向は1225ページ許容荷重をご覧ください。) WS + WR + M ≦1WS MAX WR MAX M MAX●ショックアブソーバ付の場合①等価質量m1を求める。m1 =I②等価質量m2を求める。m2 =2×T×Lω = 2θ③全質量mを求める。m = m1 + m2④衝突速度を求める。V = R ×ω⑤運動エネルギーを求める。E = 1 × m × V2E < EaR22tR3×ω2TA : トルク(N・m) I : 慣性モーメント(kg・m2) …621〜622ページの計算式により求める。ω : 等角加速度(rad/s2) K : 余裕係数 5θ : 揺動角度(rad) 90゜→1.57rad 180゜→3.14rad t : 揺動時間(s)TA = IωKω = 2θt2E : 運動エネルギー(J) I : 慣性モーメント(kg・m2) …1227〜1228ページの計算式により求める。ω : 角速度(rad/s)θ : 揺動角度(rad) 90゜→1.57rad 180゜→3.14rad t : 揺動時間(s)Ea : ラバーストッパ付の 許容エネルギー…表1参照m1 : 等価質量(kg) I : 慣性モーメント(kg・m2) …621〜622ページの計算式により求める。R : 回転中心より衝突点までの 距離(m)…図1および表2参照m2 : 等価質量(kg)T : 実効トルク(N・m) …実効トルク表または線図より求める。L : ショックアブソーバストローク(m) …表2参照ω : 角速度(rad/s)θ : 揺動角度(rad) 90゜→1.57rad 180゜→3.14rad t : 揺動時間(s)m : 全質量(kg)V : 衝突速度(m/s)E : 運動エネルギー(J)Ea : ショックアブソーバ付の 許容エネルギー…表1参照E =1× I ×ω2ω = 2θt2角度 90゜ 180゜RAG□10.05〜0.250.1〜0.5RAG□30.05〜0.40.1〜0.8RAG□80.05〜0.50.1〜1.0RAG□200.06〜0.60.12〜1.2揺動時間(s)形式RAG□1RAG□3RAG□8RAG□20ラバーストッパ付の許容エネルギー(J)0.0030.0050.0080.030ショックアブソーバ付の許容エネルギー(J)—0.300.531.14表1. 許容エネルギーEa形式RAG□3RAG□8RAG□20回転中心より衝突点までの距離R(m)0.0150.0180.021ショックアブソーバストロークL(m)0.0050.0050.008ショックアブソーバ形式KSHAR5×5-DKSHAR5×5-EKSHAR6×8-F表2.形式RAG□1RAG□3RAG□8RAG□20スラスト荷重WS MAX(N)2060120160ラジアル荷重WR MAX(N)2080100120モーメント荷重M MAX(N・m)0.40.91.33.5表3. 許容荷重図1. 回転中心より衝突点までの距離RRE < Ea注:揺動時間は0.5MPa時、無負荷のラバーストッパ仕様の値です。・・・6202014_10
Page 8:選定●薄い長方形板(直方体)●板の長さ a1(m) a2(m)●辺の長さ b (m)●質量 m1(kg) m2(kg)備考:取付方向は水平。 取付方向が垂直の場合は揺動時間が変化する。■慣性モーメント I(kg・m2) ■回転半径■慣性モーメント I(kg・m2) ■回転半径■慣性モーメント I(kg・m2) ■回転半径■慣性モーメント I(kg・m2) ■回転半径■慣性モーメント I(kg・m2) ■回転半径■慣性モーメント I(kg・m2) ■回転半径■慣性モーメント I(kg・m2) ■回転半径12 12I =m1(4a12+b2)+m2(4a22+b2)dd1d2RR1R2Ram1bdd Iaロータリアクチュエータ負荷Ibアームm2R1集中荷重aba1ba2R212(4a12+b2)+(4a22+b2)●直方体●辺の長さ a(m) b(m)●質量 m(kg)備考:取付方向は特になし。 すべらせて使用する場合は別途考慮。12I =m(a2+b2)(A)Jの値→大 Jの値→小(B)dd1d2RRabdR1集中荷12a2+b2【回転軸がワークを通っている場合】■慣性モーメント算出用図●円盤●直径 d(m)●質量 m(kg)備考:取付方向は特になし。 すべらせて使用する場合は別途考慮。8I=md2(A)Jの値→大 Jの値→小(B)dd1d2RR1R2Ram1bdd Iaロータリアクチュエータ負荷Ibアームm2R1集中荷重aba1ba2R28d2●段付円盤●直径 d1(m) d2(m)●質量 d1部分 m1(kg) d2部分 m2(kg)備考:d1部分に比べてd2部分が非常に小さい場合は無視してよい。8I=1(m1d12+m2d22)(A)Jの値→大 Jの値→小(B)d1d2Rdd8d12+d22●棒(回転中心が端)●棒の長さ R(m)●質量 m(kg)備考:取付方向は水平。 取付方向が垂直の場合は揺動時間が変化する。3I=mR2(A)Jの値→大 Jの値→小(B)dd1d2RR1R2Ram1bdd Iaロータリアクチュエータ負荷Ibアームm2R1集中荷重aba1ba2R23R2●棒(回転中心が重心)●棒の長さ R(m)●質量 m(kg)備考:取付方向は特になし。12I=mR2(A)Jの値→大 Jの値→小(B)d1d2Rdd12R2●細い棒●棒の長さ R1(m) R2(m)●質量 m1(kg) m2(kg)備考:取付方向は水平。 取付方向が垂直の場合は揺動時間が変化する。3 3I=m1・R12+ m2・R22d2RR1R2Ram1bdd Iaロータリアクチュエータ負荷Ibアームm2R1集中荷重aba1ba2R23R12+R226212014_10
Page 9:選定■慣性モーメント I(kg・m2)■慣性モーメント I(kg・m2)■慣性モーメント I(kg・m2)■慣性モーメント I(kg・m2)■慣性モーメント I(kg・m2)■慣性モーメント I(kg・m2)●集中荷重●集中荷重の形状●集中荷重の重心までの長さ R1(m)●アームの長さ R2(m)●集中荷重の質量 m1(kg)●アームの質量 m2(kg) 回転半径:k2は集中荷重の形状により算出する。備考:取付方向は水平。 m2がm1に比較して非常に小さい場合はm2=0で計算してよい。3I=m1k2+m1R12+m2R22R1R2am1bdd Iaロータリアクチュエータ負荷Ibアームm2R1集中荷重aba1ba2R2●直方体●辺の長さ h(m)●回転軸から負荷中心までの距離 L(m)●質量 m(kg)備考:立方体も同じ。12I=mh2+mL2LhLh2h2h1h1LdLd2d1●歯車●歯車 ロータリ側 a 負荷側 b●負荷の慣性モーメント N・m歯車を介する場合の負荷JLをロータリアクチュエータ軸まわりに換算する方法【回転軸がワークからオフセットしている場合】負荷のロータリ軸まわりの慣性モーメント備考:歯車の形状が大きくなると歯車の慣性モーメントを考慮する必要がある。bIa = a IbR1R2am1bdd Iaロータリアクチュエータ負荷Ibアームm2R1集中荷重aba1ba2R2●中空の直方体●辺の長さ h1(m) h2(m)●回転軸から負荷中心までの距離 L(m)●質量 m(kg)備考:断面は立方体のみ。12I=m(h22+h12)+mL2LhLh2h2h1h1LdLd2d1●円柱●直径 d(m)●回転軸から負荷中心までの距離 L(m)●質量 m(kg) 16I= md2+mL2LhLh2h2h1h1LdLd2d1●中空の円柱●直径 d1(m) d2(m)●回転軸から負荷中心までの距離 L(m)●質量 m(kg)16I= m(d22+d12)+mL2LhLh2h2h1h1LdLd2d126222014_10
Page 10:選定●計算例1. 使用条件の確認①揺動角度:90゜②揺動時間:0.4(s)③印加圧力:0.5(MPa)④負荷の形状…上記に示す 負荷の材質 …長方形板:アルミ合金(比重=2.68×103kg/m3) …直方体:鋼(比重=7.85×103kg/m3)⑤取付方向(姿勢):水平2. 揺動時間の確認揺動時間は0.5s/90゜なので、RAG□3以上であれば問題ない。3. トルクサイズの選定最初に慣性モーメントを計算します。長方形板m1 = 0.05×(0.12 − 0.025)×0.01×2.68×103= 0.127(kg)m2 = 0.05×0.025×0.01×2.68×103= 0.034(kg)I1=0.127{4×(0.12−0.025)2+0.052}+0.034(4×0.0252+0.052) = 0.42×10−3(kg・m2)…①直方体m3 = 0.05×0.05×0.05×7.85×103= 0.981(kg)I2 =0.981×0.052+ 0.981×0.072 = 5.01×10−3(kg・m2)…②①、②より、全体の慣性モーメント I はI= I1 + I2= 0.42×10−3+ 5.01×10−3= 5.43×10− 3(kg・m2)…③条件より、θ= 90゜、t = 0.4(s)したがって、等角加速度ωはω=2×1.57=19.625(rad/s2)…④③、④より、必要なトルクTAはTA = 5.43×10− 3×19.625×5 = 0.533(N・m)…⑤0.5MPa時に0.533(N・m)以上のトルクがある機種を実効トルク表(線図)より選定すると12120.42124. 運動エネルギーの確認ラバーストッパ付の場合条件より、θ=90゜、t=0.4(s)したがってω=2×1.57=7.85(rad/s)…①①より、運動エネルギーEはE =1×5.43×10− 3×7.852= 0.167(J)…②0.167> 0.008であり、ラバーストッパ付では対応できない。したがってショックアブソーバ付で再計算を行なう。ショックアブソーバ付の場合m1 =5.43×10− 3=16.76(kg)…③m2 =2×0.785×0.005= 21.84(kg)…④③、④よりm=16.76+21.84=38.60(kg)…⑤V=0.018×7.85=0.141…⑥⑤、⑥より運動エネルギーを求める。E=1×38.6×0.1412=0.384(J)0.384<0.53であり、ショックアブソーバ付であれは問題なし。5. 負荷の確認【スラスト荷重】合計質量は0.034+0.127+0.981=1.142(kg)したがってWS=1.142×9.8=11.192(N)…①【ラジアル荷重】ラジアル荷重はかからないのでWR = 0(N)…②【モーメント荷重】長方体板のモーメント荷重M1はM1=(0.034+0.127)×9.8× 0.12−0.025 =0.055(N・m)…③直方体のモーメント荷重M2はM2=0.981×9.8×0.07=0.673(N・m)…④③、④より、モーメント荷重の合計はM=0.055+0.673=0.728(N・m)…⑤①、②、⑤より、負荷率を求める WS + WR + M =11.182+ 0 +0.728=0.65<1.0となり、負荷率は、1.0以下であり問題なし。6. 使用可否の確認 を選択すれば、運動エネルギー、負荷率共に満足する。0.42220.01820.0183×7.85250105012025(回転中心から立方体中心までの距離)705050長方形板RAG□8-90RAG□8-90-SS2WS MAX WR MAX M MAX 120 100 1.3長方形板に直方体の負荷がある場合(図の単位mm)・・6232014_10
Page 11:RAGシリーズ仕様表示記号項目作動形式実効トルク注1使用流体使用圧力範囲 MPa保証耐圧力使用温度範囲クッション揺動角度範囲揺動角度調節範囲注2揺動時間調節範囲注3許容エネルギー J許容スラスト荷重許容ラジアル荷重許容モーメント荷重振れ精度注4 mm給油配管接続口径複動形シングルベーンタイプ空気1.035〜60ゴムバンパ方式−5゜〜95゜−5゜〜185゜時計回り端側:0゜位置を基準に±5゜/ 反時計回り端側:90゜位置を基準に±5゜ 時計回り端側:0゜位置を基準に±5゜/ 反時計回り端側:180゜位置を基準に±5゜0.03不要(給油する場合は、タービン油1種〔ISO VG32〕相当品)M5×0.8N・mラバーストッパ付ショックアブソーバ付MPa℃ラバーストッパ付ショックアブソーバ付90゜仕様180゜仕様90゜仕様180゜仕様 s/90ラバーストッパ付ショックアブソーバ付NNN・mテーブル上面テーブル外周面形式注1:実効トルクは使用圧力0.5MPa時の値です。ベーン軸部からの内部漏れがあるため、使用条件によってはトルクが変動する場合があります。 2:揺動端位置は627ページをご覧ください。 3:揺動時間調節範囲は無負荷、使用圧力0.5MPa時のラバーストッパ仕様の値です。(目安値) 4:振れ精度は実測値であり、保証値ではありません。注:ショックアブソーバの吸収能力の範囲内であっても、ロータリアクチュエータRAGシリーズの揺動時間調節範囲と許容エネルギーを守って使用してください。備考1:ショックアブソーバの後端面にある小ねじは、緩めたり取り外したりしないでください。内部に封入されているオイルが漏れ出してショックアブソーバの機能を損ないます。 2:耐久性は、使用条件によりロータリアクチュエータRAGシリーズ本体と異なります。ショックアブソーバ仕様項目適用形式最大吸収能力吸収ストローク最高使用頻度最高衝突速度偏角度使用温度範囲Jmmcycle/minmm/s℃KSHAR5×5-DRAG□31.05608゜以下KSHAR5×5-ERAG□82.03000〜60KSHAR6×8-FRAG□203.083012゜以下形式RAG□10.1180.25〜0.7——0.05〜0.250.003—20200.4RAG□30.2940.32〜0.70.05〜0.40.0050.360800.9RAG□80.7850.2〜0.7ショックアブソーバ方式0.05〜0.50.0080.531201001.3RAG□201.960.06〜0.60.031.141601203.50.2〜0.7{2〜7.1}゜6242014_10
Page 12:注文記号質量形式RAG□1-90RAG□1-180RAG□3-90RAG□3-90-SS2RAG□3-90-SSR(L)RAG□3-180RAG□3-180-SS2RAG□3-180-SSR(L)RAG□8-90RAG□8-90-SS2RAG□8-90-SSR(L)RAG□8-180RAG□8-180-SS2RAG□8-180-SSR(L)RAG□20-90RAG□20-90-SS2RAG□20-90-SSR(L)RAG□20-180RAG□20-180-SS2RAG□20-180-SSR(L)CRK570CRK588CRK589KSHAR5×5-DKSHAR5×5-EKSHAR6×8-Fセンサスイッチ1個リード線長さAリード線長さB質量153541020101022マグネットなし290287451451451448448448641641641638638638102610301028102210261024マグネット付292288453453453449449449643643643639639639102810321030102310271025アディショナルパーツRAG - -基本形式ロータリアクチュエータRAGシリーズ角度調節機構注1無記入:両側ラバーストッパ付 SS2 :両側ショックアブソーバ付SSR :右側ショックアブソーバ付(時計回り端側)注2SSL :左側ショックアブソーバ付(反時計回り端側)注2センサスイッチ形式 注4無記入:センサスイッチなしZE101:有接点タイプ表示灯なし リード線横出し DC5〜28V、AC85〜115VZE102:有接点タイプ表示灯付 リード線横出し DC10〜28V、AC85〜115VZE201:有接点タイプ表示灯なし リード線上出し注3 DC5〜28V、AC85〜115VZE202:有接点タイプ表示灯付 リード線上出し注3 DC10〜28V、AC85〜115VZE135:2線式無接点タイプ表示灯付 リード線横出し DC10〜28VZE155:3線式無接点タイプ表示灯付 リード線横出し DC4.5〜28VZE175:3線式無接点タイプ表示灯付 リード線横出し DC5~28VZE235:2線式無接点タイプ表示灯付 リード線上出し注3 DC10〜28VZE255:3線式無接点タイプ表示灯付 リード線上出し注3 DC4.5〜28VZE275:3線式無接点タイプ表示灯付 リード線上出し注3 DC5~28V●センサスイッチの詳細は総合パーソナルカタログをご覧ください。注1:公称トルク1はショックアブソーバ付(SS2, SSR, SSL)はありません。両側ラバーストッパ付(無記入)のみの設定となります。 2:片側ショックアブソーバ付(SSR, SSL)の反対側にはラバーストッパが付きます。 3:リード線上出しタイプはリード線がセンサスイッチに対して直角方向へ出るタイプです。また、RAGS1および3は取付方法が図1の場合は、リード線上出しタイプをご使用ください。 4:センサスイッチを取り付ける場合には、マグネット付を選択してください。備考:ショックアブソーバ、ラバーストッパは本体と固定用ナット1個がセットになります。●ショックアブソーバセンサスイッチの数1:1個付2:2個付リード線長さA:1000mmB:3000mmG:300mm M8コネクタ付(ZE175、ZE275のみ)揺動角度90:90゜180:180゜公称トルク1:0.118N・m3:0.294N・m8:0.785N・m20:1.96N・mマグネット 注4無記入:マグネットなし S :マグネット付-KSHAR5×5-D:RAG□3-□用5×5-E:RAG□8-□用6×8-F:RAG□20-□用●ラバーストッパCRK570:RAG□1-□用588:RAG□3-□用、RAG□8-□用589:RAG□20-□用90゜180゜ggセンサスイッチ注文記号ページ用図注3:図16252014_10
Page 13:内部構造図A-A断面AA⑩⑪②①③⑭⑬⑧⑰⑫⑨⑱⑲⑯⑳⑮⑤④⑦⑥RAG□1・3・8・20名 称本体テーブルナットカバーブラケットストッパベアリングボルト調整ボルトバンパ六角ナットショックアブソーバマグネットホルダマグネット本体A本体Bベーン軸(出力部)ベーン軸(ロータ部)ベーン軸(シール部)シューシールシュー軸受けOリング材 質アルミ合金(アルマイト処理)ステンレス鋼アルミ合金(アルマイト処理)アルミ合金(アルマイト処理)ステンレス鋼特殊鋼硬鋼ステンレス鋼硬鋼(ニッケルめっき)合成ゴム(NBR)軟鋼(亜鉛メッキ)—アルミ合金(アルマイト処理)樹脂マグネットアルミ合金(アルマイト処理)アルミ合金(アルマイト処理)硬鋼(窒化処理)樹脂成形品合成ゴム(NBR)合成ゴム(NBR)樹脂成形品焼結含油合金合成ゴム(NBR)備 考RAG□1:特殊ベアリング RAG□3〜20:アンギュラベアリング-SS□時のみRAGS□時のみRAGS□時のみ各部名称と主要部材質No❶❷❸❹❺❻❼❽❾No①②③④⑤⑥⑦⑧⑨⑩⑪⑫⑬⑭⑮⑯⑰⑱⑲⑳6262014_10
Page 14:揺動角度範囲および揺動方向●90゜仕様●180゜仕様時計回り:配管接続口A反時計回り:配管接続口B時計回り端(0゜位置)反時計回り端(90゜位置)最大揺動範囲100゜最小揺動範囲80゜基準揺動角度90゜基準揺動角度180゜ストッパ位置決め穴調節ボルトC(ショックアブソーバC)調節ボルトD(ショックアブソーバD)による角度調節範囲±5゜調節ボルトC(ショックアブソーバC)による角度調節範囲±5゜調節ボルトD(ショックアブソーバD)位置決め穴 ストッパ調節ボルトC(ショックアブソーバC)調節ボルトD(ショックアブソーバD)時計回り:配管接続口A最大揺動範囲190゜最小揺動範囲170゜反時計回り:配管接続口B調節ボルトC(ショックアブソーバC)による角度調節範囲±5゜調節ボルトD(ショックアブソーバD)による角度調節範囲±5゜時計回り端(0゜位置)反時計回り端(180゜位置)配管接続口B配管接続口A配管接続口B配管接続口A時計回り:配管接続口A反時計回り:配管接続口B時計回り端(0゜位置)反時計回り端(90゜位置)最大揺動範囲100゜最小揺動範囲80゜基準揺動角度90゜基準揺動角度180゜ストッパ位置決め穴調節ボルトC(ショックアブソーバC)調節ボルトD(ショックアブソーバD)による角度調節範囲±5゜調節ボルトC(ショックアブソーバC)による角度調節範囲±5゜調節ボルトD(ショックアブソーバD)位置決め穴 ストッパ調節ボルトC(ショックアブソーバC)調節ボルトD(ショックアブソーバD)時計回り:配管接続口A最大揺動範囲190゜最小揺動範囲170゜反時計回り:配管接続口B調節ボルトC(ショックアブソーバC)による角度調節範囲±5゜調節ボルトD(ショックアブソーバD)による角度調節範囲±5゜時計回り端(0゜位置)反時計回り端(180゜位置)配管接続口B配管接続口A配管接続口B配管接続口A備考:図は時計回り側の配管接続口Aからエアを印加し、 テーブルが時計回りに回り切った状態(0゜位置)です。6272014_10
Page 15:寸法図(mm)1112φ42φ20下穴径φ3.3貫通(2-M6×0.75)19(時計回り)M5×0.8配管接続口RAG1外形図カタログ資料6φ60-0.0620φ46h92-角度調節ボルト(ラバーストッパ)(反時計回り)M5×0.8配管接続口4-M4×0.7深さ63143φ8深座ぐり深さ4 2-φ4.5貫通282-φ4.5貫通 深さ4 0.006 0.020φ3F8深さ4 0.006 0.020φ3F8 深さ4 0.006 0.020φ3F84-M4×0.7深さ64-M4×0.7深さ626P.C.D.45゚45゚808.563.5817.546243145171121711217112深さ4 0.010 0.0284F85.53831-0.0620φ37h9-0.0390φ35h826深さ60 0.027φ14H8-0.10□352833深さ4 0.006 0.0203F827深さ4 0.006 0.0203F811深さ4 0.006 0.0203F825043RAG□1-90RAG□1-180ショックアブソーバ寸法図(mm)Q FDCJφEGKAB(ストローク) ナットL(M)H(二面幅)B558C464661D313145E668F334G555H779J1.21.22K223L101012M11.511.513.9Q10108形式KSHAR5×5−DKSHAR5×5−EKSHAR6×8−FAM8×0.75M8×0.75M10×1備考:図は時計回り側の配管接続口からエアを印加し、 テーブルが時計回りに回り切った状態(0゜位置)です。6282014_10
Page 16:寸法図(mm)16.5112φ5φ2022.512.512.522.5(M8×0.75)(M8×0.75)(2-M8×0.75)下穴径φ3.3貫通-0.0740φ52h9φ6823角度調節ボルト(ラバーストッパ)2-角度調節ボルト(ラバーストッパ)ショックアブソーバ(KSHAR5×5-D)2-ショックアブソーバ(KSHAR5×5-D) ショックアブソーバ(KSHAR5×5-D)角度調節ボルト(ラバーストッパ)4-M4×0.7深さ63648(時計回り) (反時計回り)M5×0.8配管接続口深さ4 0.010 0.028φ4F822.5φ8深座ぐり深さ4342-φ4.5貫通22.5M5×0.8配管接続口2-φ4.5貫通 深さ4 0.010 0.028φ4F8深さ4 0.010 0.028φ4F83036深さ4 0.010 0.0284F8深さ4 0.010 0.0284F814深さ4 0.010 0.0284F8181421814218142948.577.5855252176.5-0.10□39-0.0620φ42h9-0.0390φ40h83430深さ60 0.027φ14H84-M4×0.7深さ64-M4×0.7深さ630P.C.D.深さ4 0.010 0.0284F845゚45゚12.5443656482-SS2両側ショックアブソーバ付-SSL左側ショックアブソーバ付-SSR右側ショックアブソーバ付RAG□3-90RAG□3-180RAG□3-90-SS2RAG□3-180-SS2RAG□3-90-SSRRAG□3-180-SSRRAG□3-90-SSLRAG□3-180-SSL備考:図は時計回り側の配管接続口からエアを印加し、 テーブルが時計回りに回り切った状態(0゜位置)です。6292014_10
Page 17:20.5213φ6φ209.519.59.519.5(M8×0.75)(M8×0.75)(2-M8×0.75)下穴径φ4.2貫通-0.0740φ63h9φ7924角度調節ボルト(ラバーストッパ)ショックアブソーバ(KSHAR5×5-E)角度調節ボルト(ラバーストッパ)ショックアブソーバ(KSHAR5×5-E)2-ショックアブソーバ(KSHAR5×5-E)2-角度調節ボルト(ラバーストッパ)4-M5×0.8深さ65640(時計周り側) (反時計周り側)M5×0.8配管接続口深さ4 0.010 0.028φ4F830φ9.5深座ぐり深さ5-0.0620φ48h92-φ5.5貫通36P.C.D.2181525深さ4 0.010 0.0284F8深さ4 0.010 0.028φ4F821815深さ4 0.010 0.0284F833深さ4 0.010 0.028φ4F8218152536深さ4 0.010 0.0284F82-φ5.5貫通M5×0.8配管接続口103986825653186.5-0.10□46-0.0390φ46h8364-M5×0.8深さ84-M5×0.8深さ645゚45゚深さ4 0.010 0.0284F8266569.5504019.5-SSR右側ショックアブソーバ付-SS2両側ショックアブソーバ付-SSL左側ショックアブソーバ付0 0.027φ18H8 深さ6寸法図(mm)RAG□8-90RAG□8-180RAG□8-90-SS2RAG□8-180-SS2RAG□8-90-SSLRAG□8-180-SSLRAG□8-90-SSRRAG□8-180-SSR備考:図は時計回り側の配管接続口からエアを印加し、 テーブルが時計回りに回り切った状態(0゜位置)です。6302014_10
Page 18:231φ815φ20ショックアブソーバ(KSHAR6×8-F)27.511.527.511.5(M10×1)(M10×1)(2-M10×1)-0.0740φ75h9φ92264-M6×1深さ9304-M6×1深さ94-φ5.5貫通角度調節ボルト(ラバーストッパ)ショックアブソーバ(KSHAR6×8-F)角度調節ボルト(ラバーストッパ)2-ショックアブソーバ(KSHAR6×8-F)2-角度調節ボルト(ラバーストッパ)66(時計回り側) (反時計回り側)M5×0.8配管接続口2-φ6.6貫通382-φ6.6貫通29294227.511.5深さ4 0.010 0.028φ4F8深さ4 0.010 0.028φ4F82深さ4 0.010 0.0284F8深さ4 0.010 0.0284F82121542217.5深さ4 0.010 0.0284F82152116φ11深座ぐり深さ64-M5×0.8深さ842P.C.D.2深さ4 0.010 0.0284F845゚45゚深さ4 0.010 0.028φ4F8M5×0.8配管接続口3048586676深さ60 0.033φ20H8-0.0740φ56h9-0.0460φ54h8-0.10□55201254491061026259寸法図(mm)RAG□20-90RAG□20-180RAG□20-90-SS2RAG□20-180-SS2RAG□20-90-SSLRAG□20-180-SSLRAG□20-90-SSRRAG□20-180-SSR備考:図は時計回り側の配管接続口からエアを印加し、 テーブルが時計回りに回り切った状態(0゜位置)です。6312014_10
Page 19:注文記号ZE135ZE175ZE235ZE275ZE101ZE201無接点タイプ無接点タイプ無接点タイプ無接点タイプ有接点タイプ有接点タイプ表示灯付表示灯付表示灯付表示灯付表示灯なし表示灯なしDC10∼28VDC5∼28VDC10∼28VDC5∼28VDC5∼28VAC85∼115VDC5∼28VAC85∼115Vリード線横出しリード線横出しリード線上出しリード線上出しリード線横出しリード線上出しZE155ZE255ZE102ZE202無接点タイプ無接点タイプ有接点タイプ有接点タイプ表示灯付表示灯付表示灯付表示灯付DC4.5∼28VDC4.5∼28VDC10∼28VAC85∼115VDC10∼28VAC85∼115Vリード線横出しリード線上出しリード線横出しリード線上出しA 1000mmB 3000mmG 300mm M8コネクタ付(ZE175、ZE275のみ)センサスイッチ形式リード線長さシリーズRAGS:ロータリアクチュエータRAGシリーズ- RAGSセンサスイッチの移動要領●止めねじをゆるめますと、センサスイッチはロータリアクチュエータのスイッチ取付溝にそって移動することができます。●止めねじの締付けトルクは0.1N・m〜0.2N・m程度にしてください。アクチュエータを隣接して使用される場合は、下表の値以上にて使用してください。センサスイッチを接近して取り付ける場合●無接点タイプRAGS1RAGS3RAGS8RAGS20A52586676B20mmmm形式●有接点タイプRAGS1RAGS3RAGS8RAGS20A50566676B0形式AB6322014_10
Page 20:センサスイッチの作動範囲・応差・最高感度位置●作動範囲:Rベーンの動きと共にマグネットが移動してセンサスイッチがONになり、さらにマグネットが同方向に動いてOFFになるまでの範囲(角度)をいいます。●応差:Cベーンとともにマグネットが移動してセンサスイッチがONになった位置から、マグネットの逆方向の移動によってOFFになるまでの角度をいいます。●無接点タイプ作動範囲:R応 差:C最高感度位置注RAGS16°〜10°RAGS35°〜9°RAGS85°〜9°RAGS204°〜8°0.5°以下6 mm項目 形式備考:上表は参考値です。注:リード線の反対側端面からの距離です。●有接点タイプ作動範囲:R応 差:C最高感度位置注RAGS113°〜20°RAGS312°〜18°RAGS811°〜17°RAGS208°〜15°3°以下10mm項目 形式備考:上表は参考値です。注:リード線の反対側端面からの距離です。最高感度位置ON OFFONOFFC(応差)マグネットC(応差)RR揺動端検出センサスイッチ取付位置●無接点タイプRAGS1RAGS3RAGS8RAGS20A 備考:デーブルの0°、90°、180°位置は627ページをご覧ください。B90°・180°仕様mm形式●有接点タイプRAGS1RAGS3RAGS8RAGS20A912151913161923B90°・180°仕様mm形式B(90゚、180゚位置)A(0゚位置)6332014_10