



このカタログについて
| ドキュメント名 | μDDMotor Catalog MD_series English |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 1.8Mb |
| 登録カテゴリ | |
| 取り扱い企業 | マイクロテック・ラボラトリー株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
00
μDD Motor
Micro Direct Drive
Motor
MD series
μDDMotor
Miniature AC servomotor
with high torque and high-resolution
Features
■ Built-in high performance encoder that enables direct fine positioning from resolutions of 1 arc-sec.
■ Delivers high torque using high performance magnets and high density winding technology.
■ Delivers small size with the motor and encoder designed as a single unit.
■ Able to bear large loads directly through the use of a high stiffness bearing.
■ Able to support hollow shaft structures.
■ Customized designs are supported to suit our customer needs.
MICROTECH LABORATORY INC.
Page2
01
Delivering a lineup with a wide range of application
options of compact high-performance next-generation
servo motors with built in encoders.
MDS-13 series
■ Body diameter: φ13 mm
Body length: 26/32/38 mm
■ Max torque: 7/15/25 mN・m
■ Max speed: 3000 rpm
■ Max resolution: 500 P/R, 11 bit
MDS/MDH-20 series
■ Body diameter: φ21 mm
Body length: 32/38/44 mm
■ Max torque: 40/90/130 mN・m
■ Max speed: 3000 rpm
■ Max resolution: 72,000 P/R, 18 bit
■ Hollow diameter: φ2.6 mm (MDH type)
MDS/MDH-30 series
■ Body diameter: φ30 mm
Body length: 32/38/44 mm
■ Max torque: 140/280/420 mN・m
■ Max speed: 1000 rpm
■ Max resolution: 108,000 P/R, 19 bit
■ Hollow diameter: φ4 mm (MDH type)
MDS/MDH-40 series
■ Body diameter: φ40 mm
Body length: 32/38/44 mm
■ Max torque: 0.33/0.70/1.0 N・m
■ Max speed: 450 rpm
■ Max resolution: 324,000 P/R, 20 bit
■ Hollow diameter: φ6 mm (MDH type)
MDH-70 series
■ Body diameter: φ70 mm
Body length: 32/38/44 mm
■ Max torque: 1.0/2.2/3.1 N・m (with DC48V drive)
■ Max speed: 200 rpm
■ Max resolution: 648,000 P/R, 21 bit
■ Hollow diameter: φ25 mm (MDH type)
01 Micro Direct Drive Motor
Page3
02
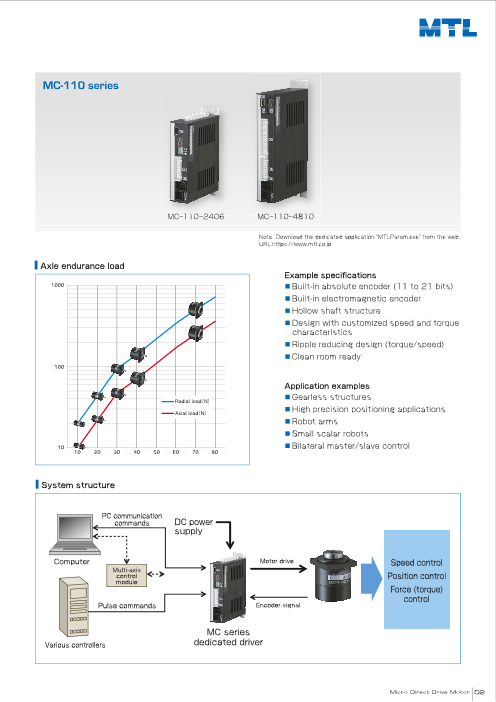
MC-110 series
MC-110-2406 MC-110-4810
Note: Download the dedicated application "MTLParam.exe" from the web.
URL:https://www.mtl.co.jp
■ Axle endurance load
Example specifications
1000 ■ Built-in absolute encoder (11 to 21 bits)
■ Built-in electromagnetic encoder
■ Hollow shaft structure
■ Design with customized speed and torque
characteristics
■ Ripple reducing design (torque/speed)
■ Clean room ready
100
Application examples
■
Radial load(N) Gearless structures
■
Axial load(N) High precision positioning applications
■ Robot arms
■ Small scalar robots
10 ■ Bilateral master/slave control
10 20 30 40 50 60 70 80
■ System structure
PC communication
commands DC power
supply
Computer Motor drive Speed control
Multi-axis
control Position control
module
Force (torque)
control
Pulse commands Encoder signal
MC series
Various controllers dedicated driver
Micro Direct Drive Motor 02
Page4
03
MDS-13 series(Characteristic example) Development information
■ MDS-13 [The photo is full size] ■ Outer Dimensions
Motor cable
φ3.3
Encoder cable
1 φ17.5
9 1 7.5
L1 (Body length) 4-φ3 PCD15.2
■ Standard models
Model L1 dimension
MDS-1306 25.4 MDS-13△-11B(Absolute)
MDS-1312 31.4 △:Body length 06,12,18
MDS-1318 37.4 Note: Please ask us if there is a particular resolution you prefer.
■ MDS-13 series( Representative characteristics of standard models)
Unit MDS-1306 MDS-1312 MDS-1318
Input power (driver input) DCV 24
Maximum speed rpm 3000
Rated speed rpm 3000
Peak torque at stall mNm 7.0 15 25
Rated torque mNm 3.0 5.5 8.0
Continuous rated torque mNm 3.0 5.0 7.5
Peak power W 2.0 4.0 8.0
Peak power rate kW/s 4.5 13 27
Peak armature current Arms 2.6 2.6 2.6
Rated armature curren(t *1) Arms 1.1 1.0 1.0
Voltage constant V/krpm 0.28 0.61 1.0
Torque constan(t at25℃) Nm/Arms 2.7 5.8 9.6
Line armature resistance(at25℃) Ω 1.1 1.8 2.5
Line armature inductance mH 0.13 0.21 0.39
Rotor Poles P 8
Max encoder resolution P/R Incremental:500/Absolute:2,048(11bit)
Moment of inertia J g・cm2 0.11 0.17 0.23
Permissible radial load Fr N 20
Permissible axial load Fa N 10
Load reference point distance La mm 19.7 25.7 31.7
Mass kg 0.04 0.05 0.06
Applicable motor driver MC-110-2406
Standard heat sink 55×55×4 Aluminum
Note: (*1) Rated armature current is the value measured with the standard heat sink attached to the motor at an ambient temperature of 40°C.
* Only available with the MDS type.
■ Explanation of motor characteristic terminology
■ Peak armature current The maximum current that can flow through the motor momentarily, determined by the instantaneous heat capacity of the armature winding.
■ Rated armature current The maximum current that can flow through the motor continuously, determined from the degree of temperature increase of the motor.
■ Peak torque The maximum instantaneous torque that occurs at the peak armature current, which is the maximum torque that occurs instantaneously
during acceleration and deceleration such as when starting or stopping the load.
■ Rated torque The maximum torque that occurs at the rated armature current when the motor is restrained.
■ Continuous rated torque The maximum torque that occurs at the rated armature current when the motor is at the rated speed.
■ Peak power The maximum power that can occur when driven by the designated dedicated driver.
■ Peak power rate The power increase rate when the motor alone is accelerating at the peak armature torque.
■ Moment of inertia〔J〕 The moment of inertia is represented by J (=GD2/4).
■ Load reference point distance LA The distance from the bearing start point to the load reference point. (S: Total shaft length/2 H: Flange end)
■ Load point distance LR The distance from the point of application of radial load to the load reference point.
■ LaRelationship between tolerated F [ R N ] = - - - - - × F r F:R User load [N] F:r Tolerated radial load [N]
radial load and load point La+LR
03 Micro Direct Drive Motor
φ13
φ3 h7
φ10 h7
300
□13
Page5
04
MDS/MDH-20 series(Characteristic example)
■ MDS-20 [The photo is full size] ■ Outer Dimensions
Motor cable
Encoder cable φ3.3
φ28
3
0.5
12 2 10
4-φ2 PCD24
L1(Body length) 12
■ MDH-20 [The photo is full size] ■ Outer Dimensions
Motor cable
Encoder cable φ3.3
3 φ28
3
0.5
12 0.5 3.5
2 6-M1.6 depth 2.5 PCD10
L1(Body length) 6 4-φ2 PCD24
■ Standard models
Model L1 dimension
MD□-2006 31.5 MD■-20△-36KE(Incremental)
MD□-2012 37.5 MDS-20△-18B(Absolute)
MD□-2018 43.5 ■:Shaft shape S(solid shaft), H(Hollow shaft) △:Body length 06,12,18
Note: Please ask us if there is a particular resolution you prefer.
■ MDS/H-20 series( Representative characteristics of standard models)
Unit MDS-2006 MDH-2006 MDS-2012 MDH-2012 MDS-2018 MDH-2018
Input power (Driver input) DCV 24
Maximum speed rpm 3000
Rated speed rpm 1500
Peak torque at stall Nm 0.04 0.09 0.13
Rated torque Nm 0.017 0.030 0.040
Continuous rated torque Nm 0.014 0.026 0.030
Peak power W 5.0 10 17
Peak power rate kW/s 19 15 62 43 99 65
Peak armature current Arms 2.6 4.3 5.6
Rated armature curren(t *1) Arms 1.1 1.2 1.4
Voltage constant V/krpm 1.6 2.5 2.4
Torque constan(t at25℃) Nm/Arms 0.015 0.024 0.023
Line armature resistance(at25℃) Ω 3.5 2.2 1.9
Line armature inductance mH 1.1 0.79 0.82
Rotor Poles P 10
Max encoder resolution P/R Incremental:72,000/Absolute:262,144(18bit)
Moment of inertia J g・cm2 0.78 1.5 1.2 2.0 1.7 2.4
Permissible radial load Fr N 44
Permissible axial load Fa N 22
Load reference point distance La mm 29.8 28.5 35.7 34.5 41.7 40.4
Mass kg 0.088 0.10 0.12
Applicable motor driver MC-110-2406
Standard heat sink 100×100×5 Aluminum
Note: (*1) Rated armature current is the value measured with the standard heat sink attached to the motor at an ambient temperature of 40°C.
* The absolute encoder is only available with the MDS type.
Micro Direct Drive Motor 04
φ21
φ21
φ2.6 Through hole
φ7
φ6 G7
φ13 h7 φ4 h6
φ18 h7 φ18 h7
300 300
□21 □21
Page6
05
MDS/MDH-30 series(Characteristic example)
■ MDS-30 [The photo is full size] ■ Outer Dimensions
Motor cable
Encoder cable φ4.2
4 φ40
1 12
13.5 2 13 4-φ3 PCD35
L1(Body length) 15
■ MDH-30 [The photo is full size] ■ Outer Dimensions
Motor cable
Encoder cable φ4.2
4 φ40
3
0.5
1 4
6-M2 depth 3.5 PCD12.5
13.5 2 5
4-φ3 PCD35
L1(Body length)
■ Standard models
Model L1 dimension
MD□-3006 31.5 MD■-30△-108KE(Incremental)
MD□-3012 37.5 MD■-30△-19B(Absolute)
MD□-3018 43.5 ■:Shaft shape S(solid shaft), H(Hollow shaft) △:Body length 06,12,18
Note: Please ask us if there is a particular resolution you prefer.
■ MDS/H-30 series(Representative characteristics of standard models)
Unit MDS-3006 MDH-3006 MDS-3012 MDH-3012 MDS-3018 MDH-3018
Input power (Driver input) DCV 48
Maximum speed rpm 1000
Rated speed rpm 1000
Peak torque at stall Nm 0.14 0.28 0.42
Rated torque Nm 0.060 0.095 0.13
Continuous rated torque Nm 0.044 0.068 0.10
Peak power W 15 20 30
Peak power rate kW/s 31 23 71 60 110 98
Peak armature current Arms 4.6 5.6 6.3
Rated armature curren(t *1) Arms 1.8 1.8 1.7
Voltage constant V/krpm 2.8 4.5 6.8
Torque constan(t at25℃) Nm/Arms 0.026 0.043 0.065
Line armature resistance(at25℃) Ω 2.1 2.3 2.5
Line armature impedance mH 1 1.3 1.5
Rotor Poles P 16
Max encoder resolution P/R Incremental:108,000/Absolute:524,288(19bit)
Moment of inertia J g・cm2 6.5 8.9 11.2 13.6 15.9 18.3
Permissible radial load Fr N 94
Permissible axial load Fa N 47
Load reference point distance La mm 32.0 30.0 38.0 36.0 43.9 41.9
Mass kg 0.13 0.16 0.18
Applicable motor driver MC-110-2406/MC-110-4810
Standard heat sink 120×120×8 Aluminum
Note: (*1) Rated armature current is the value measured with the standard heat sink attached to the motor at an ambient temperature of 40°C.
05 Micro Direct Drive Motor
φ30 φ30
φ4 Through hole
φ8
φ8 H7
φ5 h6
φ17 h7
φ27 h7
φ27 h7
300 300
□30 □30
Page7
06
MDS/MDH-40 series(Characteristic example)
■ MDS-40 [The photo is full size] ■ Outer Dimensions
Motor cable
Encoder cable φ4.2
4 φ54
1 15
12 2 16
4-φ3.5 PCD47
L1(Body length) 18
■ MDH-40 [The photo is full size] ■ Outer Dimensions
Motor cable
Encoder cable φ4.2
4 φ54
3
0.5
1 5
12 2 6 6-M2.6 depth 4.5 PCD15
L1(Body length) 4-φ3.5 PCD47
■ Standard models
Model L1 dimension
MD□-4006 31.5 MD■-40△-324KE(Incremental)
MD□-4012 37.5 MD■-40△-20B(Absolute)
MD□-4018 43.5 ■:Shaft shape S(solid shaft), H(Hollow shaft) △:Body length 06,12,18
Note: Please ask us if there is a particular resolution you prefer.
■ MDS/H-40 series(Representative characteristics of standard models)
Unit MDS-4006 MDH-4006 MDS-4012 MDH-4012 MDS-4018 MDH-4018
Input power (Driver input) DCV 48
Maximum speed rpm 450
Rated speed rpm 450
Peak torque at stall Nm 0.33 0.70 1.0
Rated torque Nm 0.12 0.20 0.28
Continuous rated torque Nm 0.10 0.16 0.23
Peak power W 14 27 40
Peak power rate kW/s 50 39 140 120 180 160
Peak armature current Arms 6.3 7.5 10
Rated armature curren(t *1) Arms 1.6 1.7 2.3
Voltage constant V/krpm 6.1 10 11
Torque constan(t at25℃) Nm/Arms 0.058 0.096 0.10
Line armature resistance(at25℃) Ω 2.6 2.5 1.7
Line armature inductance mH 2.6 3.0 2.0
Rotor Poles P 16
Max encoder resolution P/R Incremental:324,000/Absolute:1,048,576(20bit)
Moment of inertia J g・cm2 22.6 28.8 38.4 44.5 54.2 60.3
Permissible radial load Fr N 140
Permissible axial load Fa N 70
Load reference point distance La mm 37.7 35.2 43.7 41.2 49.6 47.1
Mass kg 0.21 0.26 0.30
Applicable motor driver MC-110-4810
Standard heat sink 150×150×8 Aluminum
Note: (*1) Rated armature current is the value measured with the standard heat sink attached to the motor at an ambient temperature of 40°C.
Micro Direct Drive Motor 06
φ40 φ40
φ6 Through hole
φ10
φ10 H7
φ6 h6
φ20 h7
φ36 h7 φ36 h7
300 300
□40 □40
Page8
07
MDH-70 series(Characteristic example)
■ MDH-70 [The photo is full size] ■ Outer Dimensions
φ70
φ25 Through hole
Encoder cable
Motor cable
φ30 H7
φ50 h7
φ65 h7
4-φ5.5 PCD80
6-M3 depth 5 PCD40
300
■ Standard models
MDH-70△-648KE(Incremental)
MDH-70△-21B(Absolute) φ90
△:Body length 06,12,18
Note: Please ask us if there is a particular resolution you prefer.
□70
Model L1 dimension
MDH-7006 31.5
MDH-7012 37.5
MDH-7018 43.5
■ MDH-70 series(Representative characteristics of standard models) Note: When MC-110-4810 driven at DC48V
Unit MDH-7006 MDH-7012 MDH-7018
Input power (Driver input) DCV 48
Maximum speed rpm 200
Rated speed rpm 200
Peak torque at stall Nm 1.0 2.2 3.1
Rated torque Nm 0.36 0.66 1.0
Continuous rated torque Nm 0.36 0.66 1.0
Peak power W 30 60 90
Peak power rate kW/s 24 83 147
Peak armature current Arms 13 16 19
Rated armature curren(t *1) Arms 2.8 3.0 3.5
Voltage constant V/krpm 0.013 0.023 0.031
Torque constan(t at25℃) Nm/Arms 0.13 0.22 0.30
Line armature resistance(at25℃) Ω 2.1 1.9 1.8
Line armature inductance mH 2.6 3.1 3.3
Rotor Poles P 20
Max encoder resolution P/R Incremental:648,000/Absolute:2,097,152(21bit)
Moment of inertia J kg・cm2 0.65 0.82 0.99
Permissible radial load Fr N 500
Permissible axial load Fa N 250
Load reference point distance La mm 27 33 38.9
Mass kg 0.53 0.65 0.77
Applicable motor driver MC-110-4810, MC-200-10020(Under development)
Standard heat sink 225×225×10 Aluminum
Note: (*1) Rated armature current is the value measured with the standard heat sink attached to the motor at an ambient temperature of 40°C.
07 Micro Direct Drive Motor
L1(Body length)
6 2 9
5 1
0.5
2.2
5
φ4.2
Page9
08
Dedicated driver unit MC series
■ MC-110-2406 ■ MC-110-2406 Outer Dimensions
22
18 4.1 max 74 0-0.2
3.5 1.5
Name plate
R1.75
CN5
ALM
INP
PWR
CN3
CN2
C
N
1 R1.75
3.5
11
■ MC-110-4810 ■ MC-110-4810 Outer Dimensions
22
11 4.1 max 74 0-0.2
3.5 1.5
Name plate
CN5 R1.75
ALM -
INP -
PWR -
CN4
CN3
CN2
C
N
1 R1.75
3.5
11
■ MC-110 series specifications
MC-110-2406 MC-110-4810
Supply power DC24V(20~40) DC48V(20~60)
Continuous output current 2.0Arms 6.0Arms
Peak output current 5.6Arms 10.0Arms
Drive type Sine wave PWM drive (20 kHz)
Protection functions Overcurrent, overload, overvoltage, undervoltage, heat, encoder error, damage prevention by fuse
Communication functions USB2.0 mini-B parameter settings, speed/position control, status monitoring
Speed position commands Forward/reverse pulse series method, pulse/direction method, 2-phase pulse series method
Torque commands Voltage command (0 to +10V) While in torque control mode
Auxiliary signal inputs Servo on, alarm reset, suppression mode, torque/speed control, zero point return, other general-purpose inputs
Signal outputs In-position, alarm, encoder A, B, Z, analog monitor output (current/speed/position difference), U, V phase output current values
Communication specifications 9600, 19200, 38400 bps, data bits: 8, no parity, stop bits: 1, no flow control
External dimensions 83×74×22mm 113×74×22mm
Mass 110g 140g
Dedicated application Download the MC-110 software package from the software download page at https://www.mtl.co.jp
■ Various cables
Model Type No. of cores Length Model Type No. of cores Length
CN1 cable(4.2)1M-TE Power cable 2 1m CN2 bent cable(4.2)0.7M 0.7m
CN4 cable MC-110 Flat cable for interface 30 1m 2.7M Motor extension cable 3 2.7m
CN5 cable USB2.0 cable mini-B 1m 4.7M 4.7m
CN3 bent cable(4.2)0.7M 0.7m
2.7M Encoder extension cable 14 2.7m
4.7M 4.7m
Micro Direct Drive Motor 08
132 100
(3.5) 125 (Mounting pitch) (3.5)
0 (3) 94 (Mounting pitch) (3)113 -0.2 83 0-0.2
3.2 max
CN4
MTL
MTL
Page10
09
Speed/torque characteristic examples
■ MDS-1306 ■ MDS-1312 ■ MDS-1318
4500 4500 4500
3000 3000 3000
CDZ IDZ CDZ IDZ CDZ IDZ
1500 1500 1500
0 0 0
0 0.002 0.004 0.006 0.008 0.01 0 0.005 0.01 0.015 0.02 0 0.01 0.02 0.03
Torque T[Nm] Torque T[Nm] Torque T[Nm]
■ MDS/H-2006 ■ MDS/H-2012 ■ MDS/H-2018
4500 4500 4500
3000 3000 3000
CDZ IDZ CDZ IDZ CDZ IDZ
1500 1500 1500
0 0 0
0 0.01 0.02 0.03 0.04 0.05 0 0.02 0.04 0.06 0.08 0.1 0 0.03 0.06 0.09 0.12 0.15
Torque T[Nm] Torque T[Nm] Torque T[Nm]
■ MDS/H-3006 ■ MDS/H-3012 ■ MDS/H-3018
1500 1500 1500
1000 1000 1000
CDZ IDZ CDZ IDZ CDZ IDZ
500 500 500
0 0 0
0 0.03 0.06 0.09 0.12 0.15 0 0.05 0.1 0.15 0.2 0.25 0.3 0 0.1 0.2 0.3 0.4 0.5
Torque T[Nm] Torque T[Nm] Torque T[Nm]
09 Micro Direct Drive Motor
Rotational speed N[rpm] Rotational speed N[rpm] Rotational speed N[rpm]
Rotational speed N[rpm] Rotational speed N[rpm] Rotational speed N[rpm]
Rotational speed N[rpm] Rotational speed N[rpm] Rotational speed N[rpm]
Page11
10
■ MDS/H-4006 ■ MDS/H-4012 ■ MDS/H-4018
600 600 600
450 450 450
300 300 300
CDZ IDZ CDZ IDZ CDZ IDZ
150 150 150
0 0 0
0 0.1 0.2 0.3 0.4 0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1 1.2
Torque T[Nm] Torque T[Nm] Torque T[Nm]
■ MDH-7006 ■ MDH-7012 ■ MDH-7018
300 300 300
200 200 200
CDZ IDZ CDZ IDZ CDZ IDZ
100 100 100
0 0 0
0 0.2 0.4 0.6 0.8 1 1.2 0 1 2 3 0 1 2 3 4
Torque T[Nm] Torque T[Nm] Torque T[Nm]
Notes
Usage regimes
①Continuous usage regime (CDZ)
Indicates the range of continuously operable torques and speeds.
The continuous operation range is the value when measures with the standard heat sink at the bottom of each spec
table is fitted to the motor under an ambient temperature of 40°C.
②Intermittent usage regime (IDZ)
The range that can be used such as during short intermittent operation, startup, acceleration, deceleration, etc.
Refer to the overload duty characteristics in the separate document for details on the limits on torque and operation
time during intermittent use. (Check the website or contact us)
Speed
The maximum speed of an incremental encoder is limited by the response frequency.
The speed range can also be further increased by reducing the encoder resolution.
Micro Direct Drive Motor 10
Rotational speed N[rpm] Rotational speed N[rpm]
Rotational speed N[rpm] Rotational speed N[rpm]
Rotational speed N[rpm] Rotational speed N[rpm]
Page12
11
Dedicated driver unit MC-110 series
■ System block diagram
gate power control power
supply supply
Voltage
detection Current
gate drive
Temperature detection
detection
Position control
Speed control
Torque control
Micro Direct Drive Motor
MD series
■This product, you may want to change without notice MICROTECH LABORATORY INC.
because the development of binding products. ■Head office: 8-1-46 Honcho, Kamitsuruma, minami-ku Sagamihara-shi Kanagawa 252-0318, Japan
■For inquiries about these products, contact the following PHONE.81-42-746-0123 FAX.81-42-746-0960
coordinator at our company.
E-mai l : motor@mtl.co.jp <Coordinator: Motor unit: Nomura> https://www.mtl.co.jp/en.html
201710MD-06E