




【小型DDモータ・軽量高トルク・静音化・高速化・高精度位置決めに最適】超小型中空ACダイレクトドライブサーボモータ『DDモータ』
製品カタログ
エンコーダを内蔵した小型・高トルク・中空ダイレクトドライブモータです。(カタログ更新しました 2018/10/04版)
高性能エンコーダを搭載し、ダイレクトに分解能1arc・secからの微細位置決めが可能です。
高性能磁石と高密度巻線技術により、高トルクを実現しました。
モータ・エンコーダの一体設計により、小型化を実現しました。
高剛性軸受の採用により、ダイレクトに高荷重を負うことができます。
中空軸構造が可能です。
お客様のニーズに即して、カスタマイズ設計で対応致します。
<ダイレクトドライブモータを用いたマスター・スレーブデモ>
https://youtu.be/iqym6ychy0Q
関連メディア
このカタログについて
| ドキュメント名 | 【小型DDモータ・軽量高トルク・静音化・高速化・高精度位置決めに最適】超小型中空ACダイレクトドライブサーボモータ『DDモータ』 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 2.9Mb |
| 登録カテゴリ | |
| 取り扱い企業 | マイクロテック・ラボラトリー株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
00
μDDモータ
Micro Direct Drive
Motor
MD series
μDDMotor
超小型 中空ACサーボモータ
特長
■ 高性能エンコーダを搭載し、ダイレクトに分解能1arc・secからの微細位置決めが可能です。
■ 高性能磁石と高密度巻線技術により、高トルクを実現しました。
■ モータ・エンコーダの一体設計により、小型化を実現しました。
■ 高剛性軸受の採用により、ダイレクトに高荷重を負うことができます。
■ 中空軸構造が可能です。
■ お客様のニーズに即して、カスタマイズ設計で対応致します。
マイクロテック・ラボラトリー株式会社
Page2
01
エンコーダを内蔵した小型・ハイパフォーマンス次世代型サーボモータ
幅広い用途選択を可能にするラインナップ化を実現
MDS-13 series
■ 胴径: φ13mm 胴長: 26/32/38mm
■ 最大トルク: 7/15/25mN・m
■ 最高速度: 3000rpm
■ 最高分解能: 500P/R、11bit
MDS/MDH-20 series
■ 胴径: φ21mm 胴長: 32/38/44mm
■ 最大トルク: 40/90/130mN・m
■ 最高速度: 3000rpm
■ 最高分解能: 72,000P/R、18bit
■ 中空径: φ2.6mm(MDH型)
MDS/MDH-30 series
■ 胴径: φ30mm 胴長: 32/38/44mm
■ 最大トルク: 140/280/420mN・m
■ 最高速度: 1000rpm
■ 最高分解能: 108,000P/R、19bit
■ 中空径: φ4mm(MDH型)
MDS/MDH-40 series
■ 胴径: φ40mm 胴長: 32/38/44mm
■ 最大トルク: 0.33/0.70/1.0N・m
■ 最高速度: 450rpm
■ 最高分解能: 324,000P/R、20bit
■ 中空径: φ6・12mm(MDH型)
MDH-70 series
■ 胴径: φ70mm 胴長: 32/38/44mm
■ 最大トルク: 1.0/2.2/3.1N・m(DC48V駆動時)
■ 最高速度: 200rpm
■ 最高分解能: 648,000P/R、21bit
■ 中空径: φ25mm(MDH型)
01 Micro Direct Drive Motor
Page3
02
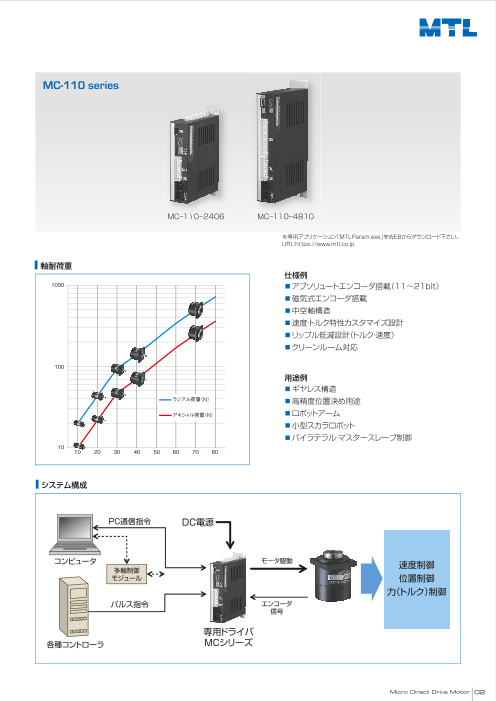
MC-110 series
MC-110-2406 MC-110-4810
※専用アプリケーション「MTLParam.exe」をWEBからダウンロード下さい。
URL:https://www.mtl.co.jp
■ 軸耐荷重
仕様例
1000 ■ アブソリュートエンコーダ搭載(11~21bit)
■ 磁気式エンコーダ搭載
■ 中空軸構造
■ 速度・トルク特性カスタマイズ設計
■ リップル低減設計(トルク・速度)
■ クリーンルーム対応
100
用途例
■ ギヤレス構造
ラジアル荷重(N) ■ 高精度位置決め用途
アキシャル荷重(N) ■ ロボットアーム
■ 小型スカラロボット
■ バイラテラル・マスタースレーブ制御
10
10 20 30 40 50 60 70 80
■ システム構成
PC通信指令 DC電源
コンピュータ モータ駆動 速度制御
多軸制御
モジュール 位置制御
力(トルク)制御
パルス指令 エンコーダ
信号
専用ドライバ
各種コントローラ MCシリーズ
Micro Direct Drive Motor 02
Page4
03
MDS-13シリーズ(特性例) 開発情報
■ MDS-13 [写真は実寸大です] ■ 外形寸法図
モータリード線
φ3.3
エンコーダリード線
1 φ17.5
9 1 7.5
L1 (胴長) 4-φ1.5 PCD15.2
■ 標準型式
型式 L1寸法
MDS-1306 25.4 MDS-13△-11B(アブソリュート)
MDS-1312 31.4 △:胴長 06,12,18
MDS-1318 37.4 ※ご希望の分解能がありましたらお問い合わせください。
■ MDS-13シリーズ(標準機種代表特性)
単位 MDS-1306 MDS-1312 MDS-1318
供給電圧(ドライバ入力) DCV 24
最高回転速度 rpm 3000
定格回転速度 rpm 3000
瞬時最大トルク mNm 7.0 15 25
連続ストールトルク mNm 3.0 5.5 8.0
連続定格トルク mNm 3.0 5.0 7.5
瞬時最大出力 W 2.0 4.0 8.0
瞬時最大パワーレート kW/s 4.5 13 27
瞬時最大電流 Arms 2.6 2.6 2.6
連続定格電流(※2) Arms 1.1 1.0 1.0
等価誘起電圧定数 V/krpm 0.28 0.61 1.0
等価トルク定数(at25℃) Nm/Arms 2.7 5.8 9.6
線間電機子抵抗(at25℃) Ω 1.1 1.8 2.5
線間電機子インダクタンス mH 0.13 0.21 0.39
ロータ磁極数 P 8
エンコーダ最高分解能 P/R インクリメンタル:500/アブソリュート:2,048(11bit)
慣性モーメントJ g・cm2 0.11 0.17 0.23
許容ラジアル荷重Fr N 20
許容アキシャル荷重Fa N 10
荷重基準点距離La mm 19.7 25.7 31.7
質量 kg 0.04 0.05 0.06
推奨ドライバ MC-110-2406
基準ヒートシンク 55×55×4 アルミ
【注記(】※1)連続定格電流は、周囲温度40℃において、基準ヒートシンクをモータに取付て測定したときの値です。
※MDSタイプのみの取り扱いです。
■ モータ特性用語の説明
■ 瞬時最大電流 モータに瞬時的に流し得る最大電流であり、電機子巻線の瞬時的な熱容量で規制されます。
■ 連続定格電流 モータに連続して流し得る最大電流であり、モータの温度上昇限度から規制されます。
■ 瞬時最大トルク 瞬時最大電流にて発生する出力トルクであり、負荷の起動・停止等の加減速時に瞬時的に引出せる最大トルクです。
■ 連続ストールトルク モータが拘束状態のとき、連続定格電流にて発生する出力トルクです。
■ 連続定格トルク モータが定格回転速度のとき、連続定格電流にて発生する出力トルクです。
■ 瞬時最大出力 所定の専用ドライバにて駆動したとき発生し得る最大出力です。
■ 瞬時最大パワーレート モータ単体を、瞬時最大トルクで加速したときの出力上昇率です。
■ 慣性モーメント〔J〕 慣性モーメントは、J(=GD2/4) で表しています。
■ 荷重基準点距離LA ベアリング始点から荷重基準点までの距離です。(S:シャフト全長/2 H:フランジ端面)
■ 負荷荷重点距離LR ラジアル荷重のかかる位置から荷重基準点までの距離です。
■ 許容ラジアル荷重と F [R N ] = La--L-+- -L - × F r FR:ユーザ負荷荷重[N] F:r 許容ラジアル荷重[N] 荷重点の関係式 a R
03 Micro Direct Drive Motor
φ13
φ3 h7
φ10 h7
300
□13
Page5
04
MDS/MDH-20シリーズ(特性例)
■ MDS-20 [写真は実寸大です] ■ 外形寸法図
モータリード線
エンコーダリード線 φ3.3
φ28
3
0.5
12 2 10
4-φ2 PCD24
L1(胴長) 12
■ MDH-20 [写真は実寸大です] ■ 外形寸法図
モータリード線
エンコーダリード線 φ3.3
3 φ28
3
0.5
12 0.5 3.5
2 6-M1.6 深さ2.5 PCD10
L1(胴長) 6 4-φ2 PCD24
■ 標準型式
型式 L1寸法
MD□-2006 31.5 MD■-20△-36KE(インクリメンタル)
MD□-2012 37.5 MDS-20△-18B(アブソリュート)
MD□-2018 43.5 ■:シャフト形状 S(中実軸), H(中空軸) △:胴長 06,12,18
※ご希望の分解能がありましたらお問い合わせください。
■ MDS/H-20シリーズ(標準機種代表特性)
単位 MDS-2006 MDH-2006 MDS-2012 MDH-2012 MDS-2018 MDH-2018
供給電圧(ドライバ入力) DCV 24
最高回転速度 rpm 3000
定格回転速度 rpm 1500
瞬時最大トルク Nm 0.04 0.09 0.13
連続ストールトルク Nm 0.017 0.030 0.040
連続定格トルク Nm 0.014 0.026 0.030
瞬時最大出力 W 5.0 10 17
瞬時最大パワーレート kW/s 19 15 62 43 99 65
瞬時最大電流 Arms 2.6 4.3 5.6
連続定格電流(※1) Arms 1.1 1.2 1.4
等価誘起電圧定数 V/krpm 1.6 2.5 2.4
等価トルク定数(at25℃) Nm/Arms 0.015 0.024 0.023
線間電機子抵抗(at25℃) Ω 3.5 2.2 1.9
線間電機子インダクタンス mH 1.1 0.79 0.82
ロータ磁極数 P 10
エンコーダ最高分解能 P/R インクリメンタル:72,000/アブソリュート:262,144(18bit)
慣性モーメントJ g・cm2 0.78 1.5 1.2 2.0 1.7 2.4
許容ラジアル荷重Fr N 44
許容アキシャル荷重Fa N 22
荷重基準点距離La mm 29.8 28.5 35.7 34.5 41.7 40.4
質量 kg 0.088 0.10 0.12
推奨ドライバ MC-110-2406
基準ヒートシンク 100×100×5 アルミ
【注記】 (】※1)連続定格電流は、周囲温度40℃において、基準ヒートシンクをモータに取付て測定したときの値です。
※アブソリュートエンコーダはMDSタイプのみです。
Micro Direct Drive Motor 04
φ21
φ21
φ2.6 貫通穴
φ7
φ6 G7
φ13 h7 φ4 h6
φ18 h7 φ18 h7
300 300
□21 □21
Page6
05
MDS/MDH-30シリーズ(特性例)
■ MDS-30 [写真は実寸大です] ■ 外形寸法図
モータリード線
エンコーダリード線 φ4.2
4 φ40
1 12
13.5 2 13 4-φ3 PCD35
L1(胴長) 15
■ MDH-30 [写真は実寸大です] ■ 外形寸法図
モータリード線
エンコーダリード線 φ4.2
4 φ40
3
0.5
1 4
6-M2 深さ3.5 PCD12.5
13.5 2 5
4-φ3 PCD35
L1(胴長)
■ 標準型式
型式 L1寸法
MD□-3006 31.5 MD■-30△-108KE(インクリメンタル)
MD□-3012 37.5 MD■-30△-19B(アブソリュート)
MD□-3018 43.5 ■:シャフト形状 S(中実軸), H(中空軸) △:胴長 06,12,18
※ご希望の分解能がありましたらお問い合わせください。
■ MDS/H-30シリーズ(標準機種代表特性)
単位 MDS-3006 MDH-3006 MDS-3012 MDH-3012 MDS-3018 MDH-3018
供給電圧(ドライバ入力) DCV 48
最高回転速度 rpm 1000
定格回転速度 rpm 1000
瞬時最大トルク Nm 0.14 0.28 0.42
連続ストールトルク Nm 0.060 0.095 0.13
連続定格トルク Nm 0.044 0.068 0.10
瞬時最大出力 W 15 20 30
瞬時最大パワーレート kW/s 31 23 71 60 110 98
瞬時最大電流 Arms 4.6 5.6 6.3
連続定格電流(※1) Arms 1.8 1.8 1.7
等価誘起電圧定数 V/krpm 2.8 4.5 6.8
等価トルク定数(at25℃) Nm/Arms 0.026 0.043 0.065
線間電機子抵抗(at25℃) Ω 2.1 2.3 2.5
線間電機子インダクタンス mH 1 1.3 1.5
ロータ磁極数 P 16
エンコーダ最高分解能 P/R インクリメンタル:108,000/アブソリュート:524,288(19bit)
慣性モーメントJ g・cm2 6.5 8.9 11.2 13.6 15.9 18.3
許容ラジアル荷重Fr N 94
許容アキシャル荷重Fa N 47
荷重基準点距離La mm 32.0 30.0 38.0 36.0 43.9 41.9
質量 kg 0.13 0.16 0.18
推奨ドライバ MC-110-2406/MC-110-4810
基準ヒートシンク 120×120×8 アルミ
【注記(】※1)連続定格電流は、周囲温度40℃において、基準ヒートシンクをモータに取付て測定したときの値です。
05 Micro Direct Drive Motor
φ30 φ30
φ4 貫通穴
φ8
φ8 H7
φ5 h6
φ17 h7
φ27 h7
φ27 h7
300 300
□30 □30
Page7
06
MDS/MDH-40シリーズ(特性例)
■ MDS-40 [写真は実寸大です] ■ 外形寸法図
モータリード線
エンコーダリード線 φ4.2
4 φ54
1 15
12 2 16
L1(胴長) 18 4-φ3.5 PCD47
■ MDH-40 [写真は実寸大です] ■ 外形寸法図
モータリード線
エンコーダリード線 φ4.2
4 φ54
3
0.5
1 5
12 2 6 6-M2.6 深さ4.5 PCD15
L1(胴長) 4-φ3.5 PCD47
■ 標準型式
型式 L1寸法
MD□-4006 31.5 MD■-40△-324KE(インクリメンタル)
MD□-4012 37.5 MD■-40△-20B(アブソリュート)
MD□-4018 43.5 ■:シャフト形状 S(中実軸), H(中空軸) △:胴長 06,12,18
※ご希望の分解能がありましたらお問い合わせください。
■ MDS/H-40シリーズ(標準機種代表特性)
単位 MDS-4006 MDH-4006 MDS-4012 MDH-4012 MDS-4018 MDH-4018
供給電圧(ドライバ入力) DCV 48
最高回転速度 rpm 450
定格回転速度 rpm 450
瞬時最大トルク Nm 0.33 0.70 1.0
連続ストールトルク Nm 0.12 0.20 0.28
連続定格トルク Nm 0.10 0.16 0.23
瞬時最大出力 W 14 27 40
瞬時最大パワーレート kW/s 50 39 140 120 180 160
瞬時最大電流 Arms 6.3 7.5 10
連続定格電流(※1) Arms 1.6 1.7 2.3
等価誘起電圧定数 V/krpm 6.1 10 11
等価トルク定数(at25℃) Nm/Arms 0.058 0.096 0.10
線間電機子抵抗(at25℃) Ω 2.6 2.5 1.7
線間電機子インダクタンス mH 2.6 3.0 2.0
ロータ磁極数 P 16
エンコーダ最高分解能 P/R インクリメンタル:324,000/アブソリュート:1,048,576(20bit)
慣性モーメントJ g・cm2 22.6 28.8 38.4 44.5 54.2 60.3
許容ラジアル荷重Fr N 140
許容アキシャル荷重Fa N 70
荷重基準点距離La mm 37.7 35.2 43.7 41.2 49.6 47.1
質量 kg 0.21 0.26 0.30
推奨ドライバ MC-110-4810
基準ヒートシンク 150×150×8 アルミ
【注記(】※1)連続定格電流は、周囲温度40℃において、基準ヒートシンクをモータに取付て測定したときの値です。
Micro Direct Drive Motor 06
φ40 φ40
φ6 貫通穴
φ10
φ10 H7
φ6 h6
φ20 h7
φ36 h7 φ36 h7
300 300
□40 □40
Page8
07
MDH-70シリーズ(特性例)
■ MDH-70 [写真は実寸大です] ■ 外形寸法図
φ70
φ25 貫通穴
エンコーダリード線
モータリード線
φ30 H7
φ50 h7
φ65 h7
4-φ5.5 PCD80
6-M3 深さ5 PCD40
300
■ 標準型式
MDH-70△-648KE(インクリメンタル)
MDH-70△-21B(アブソリュート) φ90
△:胴長 06,12,18
※ご希望の分解能がありましたらお問い合わせください。
□70
型式 L1寸法
MDH-7006 31.5
MDH-7012 37.5
MDH-7018 43.5
■ MDH-70シリーズ(標準機種代表特性) ※MC-110-4810にてDC48駆動時
単位 MDH-7006 MDH-7012 MDH-7018
供給電圧(ドライバ入力) DCV 48
最高回転速度 rpm 200
定格回転速度 rpm 200
瞬時最大トルク Nm 1.0 2.2 3.1
連続ストールトルク Nm 0.36 0.66 1.0
連続定格トルク Nm 0.36 0.66 1.0
瞬時最大出力 W 30 60 90
瞬時最大パワーレート kW/s 24 83 147
瞬時最大電流 Arms 13 16 19
連続定格電流(※1) Arms 2.8 3.0 3.5
等価誘起電圧定数 V/krpm 13 23 31
等価トルク定数(at25℃) Nm/Arms 0.13 0.22 0.30
線間電機子抵抗(at25℃) Ω 2.1 1.9 1.8
線間電機子インダクタンス mH 2.6 3.1 3.3
ロータ磁極数 P 20
エンコーダ最高分解能 P/R インクリメンタル:648,000/アブソリュート:2,097,152(21bit)
慣性モーメントJ kg・cm2 0.65 0.82 0.99
許容ラジアル荷重Fr N 500
許容アキシャル荷重Fa N 250
荷重基準点距離La mm 27 33 38.9
質量 kg 0.53 0.65 0.77
推奨ドライバ MC-110-4810, MC-200-10020(開発中)
基準ヒートシンク 225×225×10 アルミ
【注記(】※1)連続定格電流は、周囲温度40℃において、基準ヒートシンクをモータに取付て測定したときの値です。
07 Micro Direct Drive Motor
L1 (胴長)
6 2 9
5 1
0.5
2.2
5
φ4.2
Page9
08
専用ドライバユニット MCシリーズ
■ MC-110-2406 ■ MC-110-2406外形寸法図
22
18 4.1 max 74 0-0.2
3.5 1.5
銘板
R1.75
CN5
ALM
INP
PWR
CN3
CN2
C
N
1 R1.75
3.5
11
■ MC-110-4810 ■ MC-110-4810外形寸法図
22
11 4.1 max 74 0-0.2
3.5 1.5
銘板
CN5 R1.75
ALM -
INP -
PWR -
CN4
CN3
CN2
C
N
1 R1.75
3.5
11
■ MC-110シリーズ仕様
MC-110-2406 MC-110-4810
供給電源 DC24V(20~40) DC48V(20~60)
連即出力電流 2.0Arms 6.0Arms
最大出力電流 5.6Arms 10.0Arms
駆動方式 正弦波PWM駆動(20kHz)
保護機能 過電流、過負荷、過電圧、低電圧、加熱、エンコーダエラー、ヒューズによる焼損防止
通信機能 USB2.0 mini-B パラメータ設定、速度・位置制御、状態モニタリング
速度位置指令 正逆転パルス列方式、パルス/方向方式、2相パルス列方式
トルク指令 電圧指令(0~+10V) トルク制御モード時
補助信号入力 サーボON、アラームリセット、サプレッションモード、トルク・速度制御、原点復帰、その他汎用入力
信号出力 インポジション、アラーム、エンコーダA,B,Z、アナログモニタ出力(電流・速度・位置偏差)、U,V相出力電流値
通信仕様 9600,19200,38400bps、データbi:t 8、パリティ無し、ストップbi:t 1、フロー制御無し
本体外形寸法 83×74×22mm 113×74×22mm
質量 110g 140g
専用アプリケーション https://www.mtl.co.jp よりソフトウェアダウンロードページのMC-110 ソフトウェア一式をダウンロード下さい。
■ 各種ケーブル
型式 種別 芯数 長さ 型式 種別 芯数 長さ
CN1ケーブル(4.2)1M-TE 電源ケーブル 2芯 1m CN2屈曲ケーブル(4.2)0.7M 0.7m
CN4ケーブルMC-110 インターフェース用フラットケーブル 30芯 1m 2.7M モータ延長ケーブル 3芯 2.7m
CN5ケーブル USB2.0 ケーブル mini-B 1m 4.7M 4.7m
CN3屈曲ケーブル(4.2)0.7M 0.7m
2.7M エンコーダ延長ケーブル 14芯 2.7m
4.7M 4.7m
Micro Direct Drive Motor 08
132 100
(3.5) 125 (取付ピッチ) (3.5) (3) 94 (取付ピッチ) (3)
113 0-0.2 83 0-0.2
3.2 max
CN4
MTL
MTL
Page10
09
速度・トルク特性例
■ MDS-1306 ■ MDS-1312 ■ MDS-1318
4500 4500 4500
3000 3000 3000
CDZ IDZ CDZ IDZ CDZ IDZ
1500 1500 1500
0 0 0
0 0.002 0.004 0.006 0.008 0.01 0 0.005 0.01 0.015 0.02 0 0.01 0.02 0.03
トルク T[Nm] トルク T[Nm] トルク T[Nm]
■ MDS/H-2006 ■ MDS/H-2012 ■ MDS/H-2018
4500 4500 4500
3000 3000 3000
CDZ IDZ CDZ IDZ CDZ IDZ
1500 1500 1500
0 0 0
0 0.01 0.02 0.03 0.04 0.05 0 0.02 0.04 0.06 0.08 0.1 0 0.03 0.06 0.09 0.12 0.15
トルク T[Nm] トルク T[Nm] トルク T[Nm]
■ MDS/H-3006 ■ MDS/H-3012 ■ MDS/H-3018
1500 1500 1500
1000 1000 1000
CDZ IDZ CDZ IDZ CDZ IDZ
500 500 500
0 0 0
0 0.03 0.06 0.09 0.12 0.15 0 0.05 0.1 0.15 0.2 0.25 0.3 0 0.1 0.2 0.3 0.4 0.5
トルク T[Nm] トルク T[Nm] トルク T[Nm]
09 Micro Direct Drive Motor
回転速度 N[rpm] 回転速度 N[rpm] 回転速度 N[rpm]
回転速度 N[rpm] 回転速度 N[rpm] 回転速度 N[rpm]
回転速度 N[rpm] 回転速度 N[rpm] 回転速度 N[rpm]
Page11
10
■ MDS/H-4006 ■ MDS/H-4012 ■ MDS/H-4018
600 600 600
450 450 450
300 300 300
CDZ IDZ CDZ IDZ CDZ IDZ
150 150 150
0 0 0
0 0.1 0.2 0.3 0.4 0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1 1.2
トルク T[Nm] トルク T[Nm] トルク T[Nm]
■ MDH-7006 ■ MDH-7012 ■ MDH-7018
300 300 300
200 200 200
CDZ IDZ CDZ IDZ CDZ IDZ
100 100 100
0 0 0
0 0.2 0.4 0.6 0.8 1 1.2 0 1 2 3 0 1 2 3 4
トルク T[Nm] トルク T[Nm] トルク T[Nm]
注記
使用領域
①連続使用領域(CDZ)
連続運転可能なトルク/回転速度の領域を示します。
連続運転領域は、周囲温度40℃において各種スペック表の下部にある基準ヒートシンクをモータに取り付けて測定したときの値です。
②反復使用領域(IDZ)
短時間間欠運転時や起動、加減速時などにおいて使用可能な領域です。
反復使用における、トルクと運転時間の限度については別資料の過負荷デューティ特性を参照してください。(WEBまたはお問合わせください)
回転速度
インクリメンタルエンコーダの最高回転速度は、応答周波数により制限されます。
エンコーダ分解能を低減することにより、速度領域を更に高くすることも可能です。
Micro Direct Drive Motor 10
回転速度 N[rpm] 回転速度 N[rpm]
回転速度 N[rpm] 回転速度 N[rpm]
回転速度 N[rpm] 回転速度 N[rpm]
Page12
専用ドライバユニット MC-110シリーズ
■ システム構成図
DC+24V
0V
U
DC/DC DC/DC
ゲート電源 制御電源 V
CW W M
CCW
ALM表示
SVON
RESET
S-MODE
TRQ PWM E電圧検出
ゲート駆動 高温検出 電流検出
RDY
ALM CPU
0V
INPOS
位置制御 0H
Ao 0C
Bo 速度制御 CF
Zo トルク制御
A,B,Z A,B,Z
TRQ−REF BUF AMP U,V,W U,V,W
PC通信 USB変換
Micro Direct Drive Motor
MD series
マイクロテック・ラボラトリー株式会社
MICROTECH LABORATORY INC.
■本社 〒252-0318 神奈川県相模原市南区上鶴間本町8‐1‐46
■本製品は開発途次品につき、予告なく仕様変更することがあります。 PHONE.042(746)0123(代) FAX.042(746)0960
■本製品に関するお問合せは、下記アドレスよりお問い合わせください。
E-mail : motor@mtl.co.jp https://www.mtl.co.jp
201807MDS