


車両認識に「色」と複数の特徴量を使って各車両を識別しています。
・今回は更に、カメラを雲台に付けてモーター制御する事で、対象物を画面の中央にくるように制御してみました。
・車が移動すると、影になったり、直接会場の光があたったりとムラがある事がわかります。この色ムラのノイズを除去したり、色の幅の変化を吸収したりするところがポイントです。
◆詳細はカタログをダウンロードしてご覧下さい。
このカタログについて
| ドキュメント名 | 車のおもちゃの認識&追尾デモ 車両認識&追尾デモ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 687.6Kb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社ケーアイテクノロジー (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
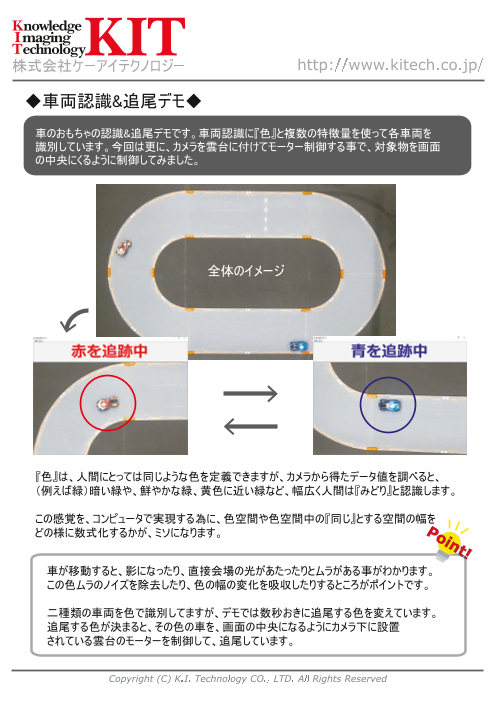
◆車両認識&追尾デモ◆
車のおもちゃの認識&追尾デモです。車両認識に『色』と複数の特徴量を使って各車両を
識別しています。今回は更に、カメラを雲台に付けてモーター制御する事で、対象物を画面
の中央にくるように制御してみました。
全体のイメージ
『色』は、人間にとっては同じような色を定義できますが、カメラから得たデータ値を調べると、
(例えば緑)暗い緑や、鮮やかな緑、黄色に近い緑など、幅広く人間は『みどり』と認識します。
この感覚を、コンピュータで実現する為に、色空間や色空間中の『同じ』とする空間の幅を
どの様に数式化するかが、ミソになります。 Point!
車が移動すると、影になったり、直接会場の光があたったりとムラがある事がわかります。
この色ムラのノイズを除去したり、色の幅の変化を吸収したりするところがポイントです。
二種類の車両を色で識別してますが、デモでは数秒おきに追尾する色を変えています。
追尾する色が決まると、その色の車を、画面の中央になるようにカメラ下に設置
されている雲台のモーターを制御して、追尾しています。