


QD72P3C3形カウンタ機能内蔵位置決めユニットの受注生産への移行および生産中止のお知らせ
このたび、長い間ご愛顧いただいておりますMELSEC-Qシリーズカウンタ機能内蔵位置決めユニットQD72P3C3について、生産を下記のとおり中止させていただきますので,ご了承の程よろしくお願いいたします。
◆生産中止機種
カウンタ機能内蔵位置決めユニット
◆生産中止時期
受注生産移行: 2020年3月31日
◆生産中止理由
主要な使用部品が入手困難な状況であり、製品の継続生産に支障をきたすことが予想されるため。
◆修理対応
修理対応期間: 2028年9月30日(生産中止後,7年間)
受注締切日: 2021年8月10日
生産中止日: 2021年9月30日
◆詳細はカタログをダウンロードしご覧いただくか、お気軽にお問い合わせ下さい。
このカタログについて
| ドキュメント名 | 【受注生産への移行および生産中止のお知らせ】QD72P3C3形カウンタ機能内蔵位置決めユニット |
|---|---|
| ドキュメント種別 | その他 |
| ファイルサイズ | 461.2Kb |
| 登録カテゴリ | |
| 取り扱い企業 | 三菱電機株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
目次
テクニカルニュース [ 1 / 26 ]
FA-D-0287-A
QD72P3C3形カウンタ機能内蔵位置決めユニットの受注生産への移行および生産中止
のお知らせ
発行
2019年9月
適用機種
QD72P3C3
三菱電機汎用シーケンサMELSEC-Qシリーズに格別のご愛顧を賜り厚くお礼申し上げます。
このたび,長い間ご愛顧いただいておりますMELSEC-Qシリーズカウンタ機能内蔵位置決めユニットQD72P3C3について,
生産を下記のとおり中止させていただきますので,ご了承の程よろしくお願いいたします。
目次
1 生産中止機種 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 生産中止時期 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
3 生産中止理由 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
4 修理対応. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
5 生産中止機種と代替機種の仕様比較. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
5.1 QD75P4N,QD75P2N,QD75P1N. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
5.2 QD70P4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
5.3 QD62 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
改訂履歴 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
三菱電機株式会社 名古屋製作所 〒461-8670 名古屋市東区矢田南 5-1-14
Page2
1 生産中止機種、2 生産中止時期、3 生産中止理由、4 修理対応
テクニカルニュース [ 2 / 26 ]
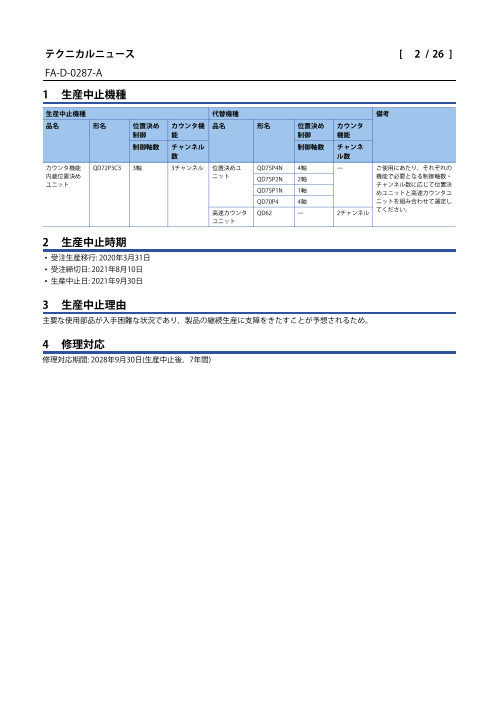
FA-D-0287-A1 生産中止機種
生産中止機種 代替機種 備考
品名 形名 位置決め カウンタ機 品名 形名 位置決め カウンタ
制御 能 制御 機能
制御軸数 チャンネル 制御軸数 チャンネ
数 ル数
カウンタ機能 QD72P3C3 3軸 3チャンネル 位置決めユ QD75P4N 4軸 ご使用にあたり,それぞれの
内蔵位置決め ニット QD75P2N 2軸 機能で必要となる制御軸数・
ユニット チャンネル数に応じて位置決
QD75P1N 1軸 めユニットと高速カウンタユ
QD70P4 4軸 ニットを組み合わせて選定し
高速カウンタ QD62 2チャンネル てください。
ユニット
2 生産中止時期
• 受注生産移行: 2020年3月31日
• 受注締切日: 2021年8月10日
• 生産中止日: 2021年9月30日
3 生産中止理由
主要な使用部品が入手困難な状況であり,製品の継続生産に支障をきたすことが予想されるため。
4 修理対応
修理対応期間: 2028年9月30日(生産中止後,7年間)
Page3
5 生産中止機種と代替機種の仕様比較、5.1 QD75P4N,QD75P2N,QD75P1N
テクニカルニュース [ 3 / 26 ]
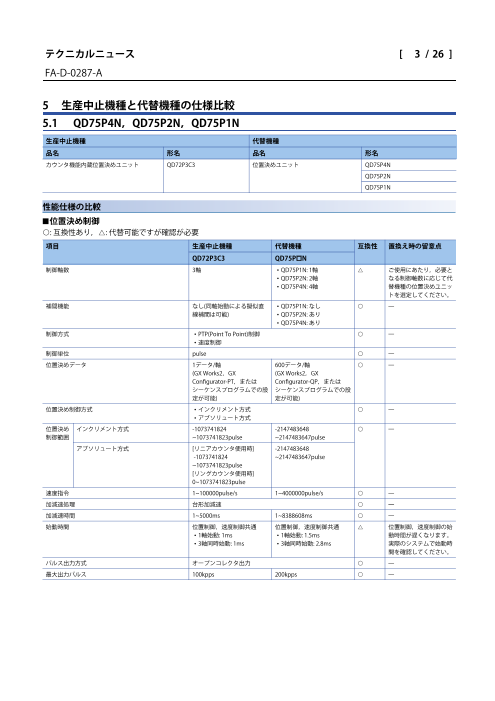
FA-D-0287-A5 生産中止機種と代替機種の仕様比較
5.1 QD75P4N,QD75P2N,QD75P1N
生産中止機種 代替機種
品名 形名 品名 形名
カウンタ機能内蔵位置決めユニット QD72P3C3 位置決めユニット QD75P4N
QD75P2N
QD75P1N
性能仕様の比較
■位置決め制御
: 互換性あり,: 代替可能ですが確認が必要
項目 生産中止機種 代替機種 互換性 置換え時の留意点
QD72P3C3 QD75PN
制御軸数 3軸 • QD75P1N: 1軸 ご使用にあたり,必要と
• QD75P2N: 2軸 なる制御軸数に応じて代
• QD75P4N: 4軸 替機種の位置決めユニッ
トを選定してください。
補間機能 なし(同軸始動による擬似直 • QD75P1N: なし
線補間は可能) • QD75P2N: あり
• QD75P4N: あり
制御方式 • PTP(Point To Point)制御
• 速度制御
制御単位 pulse
位置決めデータ 1データ/軸 600データ/軸
(GX Works2,GX (GX Works2,GX
Configurator-PT,または Configurator-QP,または
シーケンスプログラムでの設 シーケンスプログラムでの設
定が可能) 定が可能)
位置決め制御方式 • インクリメント方式
• アブソリュート方式
位置決め インクリメント方式 -1073741824 -2147483648
制御範囲 ~1073741823pulse ~2147483647pulse
アブソリュート方式 [リニアカウンタ使用時] -2147483648
-1073741824 ~2147483647pulse
~1073741823pulse
[リングカウンタ使用時]
0~1073741823pulse
速度指令 1~100000pulse/s 1~4000000pulse/s
加減速処理 台形加減速
加減速時間 1~5000ms 1~8388608ms
始動時間 位置制御,速度制御共通 位置制御,速度制御共通 位置制御,速度制御の始
• 1軸始動: 1ms • 1軸始動: 1.5ms 動時間が遅くなります。
• 3軸同時始動: 1ms • 3軸同時始動: 2.8ms 実際のシステムで始動時
間を確認してください。
パルス出力方式 オープンコレクタ出力
最大出力パルス 100kpps 200kpps
Page4
テクニカルニュース [ 4 / 26 ]
FA-D-0287-A項目 生産中止機種 代替機種 互換性 置換え時の留意点
QD72P3C3 QD75PN
出力仕様 パルス出力 F 定格負荷電圧 DC5~24V
(PULSE F) 使用負荷電圧範囲 DC4.75~30V
パルス出力 R
(PULSE R) 最大負荷電流 50mA/1点
突入電流 200mA/10ms以下
ON時最大電圧降下 DC0.5V(TYP)
OFF時漏洩電流 0.1mA以下
偏差カウンタク 定格負荷電圧 DC5~24V
リア(CLEAR) 使用負荷電圧範囲 DC4.75~30V
最大負荷電流 0.1A/1点
突入電流 0.4A/10ms以下
ON時最大電圧降下 DC1V(TYP),DC2.5V(MAX)
OFF時漏洩電流 0.1mA以下
応答時間 2ms以下(抵抗負荷)
パルス幅 1~20ms 1~65535ms
入力仕様 零点信号(PG0) 定格入力電圧/電流 DC5V/18mA DC5V/5mA インタフェース仕様が異
使用電圧範囲 DC4.5~5.5V DC4.5~6.1V なるため,接続機器の仕
様の確認が必要です。実
ON電圧/電流 DC2.7V以上/5.5mA以上 DC2V以上/2mA以上 際のシステムで確認して
OFF電圧/電流 DC1.0V以下/0.5mA以下 DC0.5V以下/0.5mA以下 ください。
入力抵抗 約390 約620
応答時間 0.1ms以下 1ms以下
最小パルス幅 0.1ms以上 1ms以上
近点ドグ信号 定格入力電圧/電流 DC24V/5mA
(DOG) 使用電圧範囲 DC19.2~26.4V
ON電圧/電流 DC17.5V以上/3.0mA以上 DC17.5V以上/3.5mA以上
OFF電圧/電流 DC7.0V以下/0.9mA以下 DC7.0V以下/1.7mA以下
入力抵抗 約6.8k 約4.3k
応答時間 1ms以下
上限リミット信 定格入力電圧/電流 DC24V/5mA
号(FLS) 使用電圧範囲 DC19.2~26.4V
下限リミット信
号(RLS) ON電圧/電流 DC17.5V以上/3.0mA以上 DC17.5V以上/3.5mA以上
OFF電圧/電流 DC7.0V以下/0.9mA以下 DC7.0V以下/1.7mA以下
入力抵抗 約6.8k 約4.7k
応答時間 1ms以下 4ms以下
ドライブユニット間の最大接続距離 2m
■その他
: 互換性あり,: 代替可能ですが確認が必要
項目 生産中止機種 代替機種 互換性 置換え時の留意点
QD72P3C3 QD75PN
周辺機器/対応ユーティリティパッケージ • GX Works2 (別売) • GX Works2 (別売) 対応するプログラミング
• GX Developer (別売) • GX Developer (別売) ツールを使用してくださ
• GX Configurator-PT (別売) • GX Configurator-QP (別売) い。
データバックアップ なし パラメータ,位置決めデー
タ,ブロック始動データはフ
ラッシュ ROMで保存可(バッ
テリレス)
外部機器接続用コネクタ A6CON1,A6CON2,A6CON4 (別売)
適合電線サイズ A6CON1,A6CON4使用時 0.3(AWG22)以下 0.3(AWG22)
A6CON2使用時 0.24(AWG24) 0.088~0.24(AWG28~AW
G24)
Page5
テクニカルニュース [ 5 / 26 ]
FA-D-0287-A項目 生産中止機種 代替機種 互換性 置換え時の留意点
QD72P3C3 QD75PN
内部消費電流(DC5V) 0.57A • QD75P1N: 0.29A
• QD75P2N: 0.30A
• QD75P4N: 0.36A
入出力占有点数 32点(I/O割付: インテリ32点)
外形寸法 高さ(H) 98mm
幅(W) 27.4mm
奥行き(D) 90mm
質量 0.16kg • QD75P1N: 0.14kg
• QD75P2N: 0.14kg
• QD75P4N: 0.16kg
Page6
テクニカルニュース [ 6 / 26 ]
FA-D-0287-A機能の比較
: 機能あり,: 機能あり(設定方法の確認が必要),: 機能なし
制御方式/機能名 内容 生産中止機種 代替機種 置換え時の留意点
QD72P3C3 QD75PN
原点復帰制御 機械原点復帰制御 近点ドグやストッパなどによって,機械的
に位置決め制御の基準点を確立します。
高速原点復帰制御 機械原点復帰制御によって位置決めユニッ
トに格納された原点アドレスへ位置決め制
御を行います。
原点復帰時のカウント値 原点復帰完了時に,原点アドレスを“[Md.3] 互換性がないため,代用
選択機能 カウント値”に格納する機能です。 方法を確認してくださ
い。*1
位置決め制御 位置制御(1軸直線制御) 位置決めデータに設定したアドレスまたは
移動量によって,指定した位置に位置決め
制御を行います。
速度制御 位置決めデータに設定した“[Da.4]指令速度”
に応じたパルスを連続して出力します。
現在値変更 “[Md.1]送り現在値”を位置決めデータに設定
したアドレスに変更します。
JOG運転 JOG始動信号がONしている間だけ,パルス
をドライブユニットへ出力します。
補助機能 速度制限機能 制御中に指令速度が“[Pr.4]速度制限値”を超 設定内容が異なります。
えるような場合,指令速度を“[Pr.4]速度制 QD75PNでは,JOG速
限値”の設定範囲内に制限する機能です。 度制限値を速度制限値と
同じ値にすることで
QD72P3C3の速度制限機
能と同等にすることが可
能です。
速度変更機能 速度制御の定速中,JOG運転の定速中に速
度を変更する機能です。
ソフトウェアストローク パラメータに設定されている上限/下限スト
リミット機能 ロークリミットの設定範囲外への指令が与
えられたとき,その指令に対する運転を実
行しない機能です。
ハードウェアストローク 位置決めユニットに接続したリミットス
リミット機能 イッチによって,減速停止を行う機能です。
加減速処理機能 制御の加減速処理調整をする機能です。
共通機能 外部入出力信号論理切換 外部に接続された機器に合わせて外部入出 設定方法が異なります。
え機能 力信号の論理を切り換える機能です。イン QD75PNでは,パラ
テリジェント機能ユニットスイッチの設定 メータ(バッファメモリ)
で切換え可能です。 へ設定する必要がありま
す。
外部入出力信号モニタ機 プログラミングツールにより,外部入出力
能 信号の状態をモニタする機能です。
*1 QD75PNには,原点復帰制御の原点復帰時のカウント値選択機能がありません。原点復帰完了信号ONのタイミングで,位置決めユ
ニットの送り現在値をカウンタユニットのプリセット値に設定し,カウンタユニットのプリセット機能を実行することで代用が可能
です。
Page7
テクニカルニュース [ 7 / 26 ]
FA-D-0287-A入出力信号の比較
シーケンサCPUとの入出力信号が異なるため,シーケンスプログラムの変更が必要です。シーケンサCPUとの入出力信号お
よびシーケンスプログラムの詳細は,下記を参照してください。
QD75P/QD75D形位置決めユニットユーザーズマニュアル(詳細編)
信号方向: ユニットシーケンサCPU 信号方向: シーケンサCPUユニット
デバイス 信号名称 デバイス 信号名称
No. 生産中止機種 代替機種 No. 生産中止機種 代替機種
QD72P3C3 QD75PN QD72P3C3 QD75PN
X0 ユニットREADY QD75準備完了 Y0 シーケンサREADY シーケンサレディ
X1 軸1/CH1 エラー発生 同期用フラグ Y1 軸1/CH1 エラーリセット 使用禁止
X2 軸2/CH2 エラー発生 使用禁止 Y2 軸2/CH2 エラーリセット
X3 軸3/CH3 エラー発生 Y3 軸3/CH3 エラーリセット
X4 軸1/CH1 ワーニング発生 軸1 MコードON Y4 軸1 停止 軸1 軸停止
X5 軸2/CH2 ワーニング発生 軸2 MコードON Y5 軸2 停止 軸2 軸停止
X6 軸3/CH3 ワーニング発生 軸3 MコードON Y6 軸3 停止 軸3 軸停止
X7 使用禁止 軸4 MコードON Y7 使用禁止 軸4 軸停止
X8 軸1 BUSY 軸1 エラー検出 Y8 軸1 位置決め始動 軸1 正転JOG始動
X9 軸2 BUSY 軸2 エラー検出 Y9 軸2 位置決め始動 軸1 逆転JOG始動
XA 軸3 BUSY 軸3 エラー検出 YA 軸3 位置決め始動 軸2 正転JOG始動
XB 使用禁止 軸4 エラー検出 YB 使用禁止 軸2 逆転JOG始動
XC 軸1 始動完了 軸1 BUSY YC 軸1 正転JOG始動 軸3 正転JOG始動
XD 軸2 始動完了 軸2 BUSY YD 軸1 逆転JOG始動 軸3 逆転JOG始動
XE 軸3 始動完了 軸3 BUSY YE 軸2 正転JOG始動 軸4 正転JOG始動
XF 使用禁止 軸4 BUSY YF 軸2 逆転JOG始動 軸4 逆転JOG始動
X10 軸1 位置決め完了 軸1 始動完了 Y10 軸3 正転JOG始動 軸1 位置決め始動
X11 軸2 位置決め完了 軸2 始動完了 Y11 軸3 逆転JOG始動 軸2 位置決め始動
X12 軸3 位置決め完了 軸3 始動完了 Y12 使用禁止 軸3 位置決め始動
X13 使用禁止 軸4 始動完了 Y13 軸4 位置決め始動
X14 CH1 カウント値大 軸1 位置決め完了 Y14 CH1 一致信号リセット指令 軸1 実行禁止フラグ
X15 CH1 カウント値一致 軸2 位置決め完了 Y15 CH2 一致信号リセット指令 軸2 実行禁止フラグ
X16 CH1 カウント値小 軸3 位置決め完了 Y16 CH3 一致信号リセット指令 軸3 実行禁止フラグ
X17 使用禁止 軸4 位置決め完了 Y17 使用禁止 軸4 実行禁止フラグ
X18 CH2 カウント値大 使用禁止 Y18 CH1 プリセット指令 使用禁止
X19 CH2 カウント値一致 Y19 CH2 プリセット指令
X1A CH2 カウント値小 Y1A CH3 プリセット指令
X1B 使用禁止 Y1B 使用禁止
X1C CH3 カウント値大 Y1C CH1 カウントイネーブル指令
X1D CH3 カウント値一致 Y1D CH2 カウントイネーブル指令
X1E CH3 カウント値小 Y1E CH3 カウントイネーブル指令
X1F 使用禁止 Y1F 使用禁止
Page8
テクニカルニュース [ 8 / 26 ]
FA-D-0287-Aバッファメモリの比較
バッファメモリの割付けが異なるため,シーケンスプログラムの変更が必要です。バッファメモリおよびシーケンスプログ
ラムの詳細は,下記を参照してください。
QD75P/QD75D形位置決めユニットユーザーズマニュアル(詳細編)
QD72P3C3の項目 バッファメモリアドレス
生産中止機種 代替機種
QD72P3C3 QD75PN
軸1/CH1 軸2/CH2 軸3/CH3 軸1 軸2 軸3 軸4
[Pr.1] ソフトウェアストロークリミット上限値 0 100 200 18 168 318 468
1 101 201 19 169 319 469
[Pr.2] ソフトウェアストロークリミット下限値 2 102 202 20 170 320 470
3 103 203 21 171 321 471
[Pr.3] 速度制御時の送り現在値 5 105 205 30 180 330 480
[Pr.4] 速度制限値 6 106 206 10 160 310 460
7 107 207 11 161 311 461
[Pr.5] 始動時バイアス速度 8 108 208 6 156 306 456
9 109 209 7 157 307 457
[Pr.6] 位置決め完了信号出力時間 10 110 210 59 209 359 509
[Pr.7] 偏差カウンタクリア信号出力時間 11 111 211 87 237 387 537
[Pr.9] 送り現在値・カウント値同時変更機能選択 13 113 213
[Pr.10] 原点復帰方式 20 120 220 70 220 370 520
[Pr.11] 原点復帰方向 21 121 221 71 221 371 521
[Pr.12] 原点アドレス 22 122 222 72 222 372 522
23 123 223 73 223 373 523
[Pr.13] 原点復帰速度 24 124 224 74 224 374 524
25 125 225 75 225 375 525
[Pr.14] クリープ速度 26 126 226 76 226 376 526
27 127 227 77 227 377 527
[Pr.15] 原点復帰加減速時間*1 28 128 228 82 232 382 532
(QD75PNでは“原点復帰加速時間選択”,“原点復帰減速時間選択”) 83 233 383 533
[Pr.16] リングカウンタ上限値 30 130 230
31 131 231
[Pr.17] 位置決め範囲上限値 32 132 232
33 133 233
[Pr.18] 一致検出設定 34 134 234
[Pr.19] 原点復帰時のカウント値選択 35 135 235
[JOG.1] JOG速度 40 140 240 1518 1618 1718 1818
41 141 241 1519 1619 1719 1819
[JOG.2] JOG加減速時間*2 42 142 242 50 200 350 500
(QD75PNでは“JOG運転加速時間選択”,“JOG運転減速時間選択”) 51 201 351 501
[Da.1] 運転パターン*3 90 190 290 2000 8000 14000 20000
[Da.2] 制御方式*3 91 191 291
[Da.3] 加減速時間*3 92 192 292
(QD75PNでは“加速時間No.”,“減速時間No.”)
[Da.4] 指令速度 94 194 294 2004 8004 14004 20004
95 195 295 2005 8005 14005 20005
[Da.5] 位置決めアドレス/移動量 96 196 296 2006 8006 14006 20006
97 197 297 2007 8007 14007 20007
[Md.1] 送り現在値 70 170 270 800 900 1000 1100
71 171 271 801 901 1001 1101
Page9
テクニカルニュース [ 9 / 26 ]
FA-D-0287-AQD72P3C3の項目 バッファメモリアドレス
生産中止機種 代替機種
QD72P3C3 QD75PN
軸1/CH1 軸2/CH2 軸3/CH3 軸1 軸2 軸3 軸4
[Md.2] 現在速度 72 172 272 804 904 1004 1104
(QD75PNでは“送り速度”) 73 173 273 805 905 1005 1105
[Md.3] カウント値 74 174 274
75 175 275
[Md.4] 軸動作状態 76 176 276 809 909 1009 1109
[Md.5] 軸/CHエラーコード 77 177 277 806 906 1006 1106
(QD75PNでは“軸エラー番号”)
[Md.6] 軸/CHワーニングコード 78 178 278 807 907 1007 1107
(QD75PNでは“軸ワーニング番号”)
[Md.7] ステータス 79 179 279 817 917 1017 1117
[Md.8] 外部入出力信号 80 180 280 816 916 1016 1116
[Cd.1] 速度変更値 50 150 250 1514 1614 1714 1814
51 151 251 1515 1615 1715 1815
[Cd.2] 速度変更時加減速時間*4 52 152 252 1508 1608 1708 1808
(QD75PNでは“加速時間変更値”,“減速時間変更値”) 1509 1609 1709 1809
1510 1610 1710 1810
1511 1611 1711 1811
[Cd.3] 速度変更要求 54 154 254 1516 1616 1716 1816
[Cd.4] 原点復帰要求フラグOFF要求 55 155 255 1521 1621 1721 1821
[Cd.5] 始動種別 56 156 256 1500 1600 1700 1800
(QD75PNでは“位置決め始動番号”)
[Cd.6] プリセット値設定 60 160 260
61 161 261
[Cd.7] 一致検出ポイント設定 62 162 262
63 163 263
*1 QD75PNでは,原点復帰加速時間と原点復帰減速時間を個別に設定が必要です。
*2 QD75PNでは,JOG運転加速時間とJOG運転減速時間を個別に設定が必要です。
*3 QD75PNでは,“[Da.1]運転パターン”,“[Da.2]制御方式”,“[Da.3]加速時間No.”,“[Da.4]減速時間No.”,“[Da.5]補間対象軸”から構成さ
れ,1つのバッファメモリアドレスに対して,この5つの設定値が格納されます。
*4 QD75PNでは,加速時間変更値と減速時間変更値を個別に設定が必要です。
Page10
テクニカルニュース [ 10 / 26 ]
FA-D-0287-A外観,外部機器接続用コネクタの信号配列
生産中止機種 代替機種
QD72P3C3 QD75PN
外観 外観
*1 *1
*2 *2
ピン配列(ユニット正面から見た場合)
B20 A20
B19 A19
B18 A18
B17 A17
B16 A16
B15 A15
B14 A14
B13 A13
B12 A12
B11 A11
B10 A10
B9 A9
B8 A8
B7 A7
B6 A6
B5 A5
B4 A4
B3 A3
B2 A2
B1 A1
外部機器接続用コネクタの信号配列 外部機器接続用コネクタの信号配列
CON2(軸3用) CON1(軸1,軸2用) 軸4(AX4) 軸3(AX3) 軸2(AX2) 軸1(AX1)
ピン 信号名称 ピン 信号名称 ピン 信号名称 ピン 信号名称 ピン 信号名称 ピン 信号名称 ピン 信号名称 ピン 信号名称
No. No. No. No. No. No. No. No.
B20 NC A20 CH3A_24V B20 CH2A_24V A20 CH1A_24V B20 空き A20 空き B20 PULSER B- A20 PULSER B+
B19 NC A19 CH3A_5V B19 CH2A_5V A19 CH1A_5V B19 空き A19 空き B19 PULSER A- A19 PULSER A+
B18 NC A18 CH3A COM B18 CH2A COM A18 CH1A COM B18 PULSE COM A18 PULSE COM B18 PULSE COM A18 PULSE COM
B17 NC A17 CH3B_24V B17 CH2B_24V A17 CH1B_24V B17 PULSE R A17 PULSE R B17 PULSE R A17 PULSE R
B16 NC A16 CH3B_5V B16 CH2B_5V A16 CH1B_5V B16 PULSE COM A16 PULSE COM B16 PULSE COM A16 PULSE COM
B15 NC A15 CH3B COM B15 CH2B COM A15 CH1B COM B15 PULSE F A15 PULSE F B15 PULSE F A15 PULSE F
B14 NC A14 PG03 B14 PG02 A14 PG01 B14 CLRCOM A14 CLRCOM B14 CLRCOM A14 CLRCOM
B13 NC A13 PG03 COM B13 PG02 COM A13 PG01 COM B13 CLEAR A13 CLEAR B13 CLEAR A13 CLEAR
B12 NC A12 CLEAR3 B12 CLEAR2 A12 CLEAR1 B12 RDYCOM A12 RDYCOM B12 RDYCOM A12 RDYCOM
B11 NC A11 CLEAR3 COM B11 CLEAR2 COM A11 CLEAR1 COM B11 READY A11 READY B11 READY A11 READY
B10 NC A10 DOG3 B10 DOG2 A10 DOG1 B10 PG0COM A10 PG0COM B10 PG0COM A10 PG0COM
B9 NC A9 COM1-3 B9 COM1-3 A9 COM1-3 B9 PG05 A9 PG05 B9 PG05 A9 PG05
B8 NC A8 FLS3 B8 FLS2 A8 FLS1 B8 PG024 A8 PG024 B8 PG024 A8 PG024
B7 NC A7 COM1-3 B7 COM1-3 A7 COM1-3 B7 COM A7 COM B7 COM A7 COM
B6 NC A6 RLS3 B6 RLS2 A6 RLS1 B6 COM A6 COM B6 COM A6 COM
B5 NC A5 COM1-3 B5 COM1-3 A5 COM1-3 B5 CHG A5 CHG B5 CHG A5 CHG
B4 NC A4 PULSE F3 B4 PULSE F2 A4 PULSE F1 B4 STOP A4 STOP B4 STOP A4 STOP
B3 NC A3 PULSE COM1-3 B3 PULSE COM1-3 A3 PULSE COM1-3 B3 DOG A3 DOG B3 DOG A3 DOG
B2 NC A2 PULSE R3 B2 PULSE R2 A2 PULSE R1 B2 RLS A2 RLS B2 RLS A2 RLS
B1 NC A1 PULSE COM1-3 B1 PULSE COM1-3 A1 PULSE COM1-3 B1 FLS A1 FLS B1 FLS A1 FLS
*1 LED表示が異なります。
*2 外部機器接続用コネクタの信号配列が異なるため,置換え時は配線の変更が必要です。
Page11
5.2 QD70P4
テクニカルニュース [ 11 / 26 ]
FA-D-0287-A5.2 QD70P4
生産中止機種 代替機種
品名 形名 品名 形名
カウンタ機能内蔵位置決めユニット QD72P3C3 位置決めユニット QD70P4
性能仕様の比較
■位置決め制御
: 互換性あり,: 代替可能ですが確認が必要,: 互換性なし
項目 生産中止機種 代替機種 互換性 置換え時の留意点
QD72P3C3 QD70P4
制御軸数 3軸 4軸
補間機能 なし(同軸始動による擬似直 なし
線補間は可能)
制御方式 • PTP(Point To Point)制御 PTP(Point To Point)制御 速度制御はありません。
• 速度制御 速度制御をご使用の場
合,代替機種は
QD75PNを選定してく
ださい。
制御単位 pulse
位置決めデータ 1データ/軸 10データ/軸
(GX Works2,GX (GX Works2,GX
Configurator-PT,または Configurator-PT,または
シーケンスプログラムでの設 シーケンスプログラムでの設
定が可能) 定が可能)
位置決め制御方式 • インクリメント方式
• アブソリュート方式
位置決め インクリメント方式 -1073741824 -2147483648
制御範囲 ~1073741823pulse ~2147483647pulse
アブソリュート方式 [リニアカウンタ使用時] -2147483648
-1073741824 ~2147483647pulse
~1073741823pulse
[リングカウンタ使用時]
0~1073741823pulse
速度指令 1~100000pulse/s 0~200000pulse/s
加減速処理 台形加減速
加減速時間 1~5000ms 0~32767ms
始動時間 位置制御,速度制御共通 位置制御 位置制御の始動時間が早
• 1軸始動: 1ms • 1軸始動: 0.1ms くなります。実際のシス
• 3軸同時始動: 1ms • 4軸同時始動: 0.2ms テムで始動時間を確認し
てください。
パルス出力方式 オープンコレクタ出力
最大出力パルス 100kpps 200kpps
Page12
テクニカルニュース [ 12 / 26 ]
FA-D-0287-A項目 生産中止機種 代替機種 互換性 置換え時の留意点
QD72P3C3 QD70P4
出力仕様 パルス出力 F 定格負荷電圧 DC5~24V
(PULSE F) 使用負荷電圧範囲 DC4.75~30V
パルス出力 R
(PULSE R) 最大負荷電流 50mA/1点
突入電流 200mA/10ms以下
ON時最大電圧降下 DC0.5V(TYP)
OFF時漏洩電流 0.1mA以下
偏差カウンタク 定格負荷電圧 DC5~24V
リア(CLEAR) 使用負荷電圧範囲 DC4.75~30V
最大負荷電流 0.1A/1点
突入電流 0.4A/10ms以下
ON時最大電圧降下 DC1V(TYP),DC2.5V(MAX)
OFF時漏洩電流 0.1mA以下
応答時間 2ms以下(抵抗負荷)
パルス幅 1~20ms 1~32ms
入力仕様 零点信号(PG0) 定格入力電圧/電流 DC5V/18mA インタフェース仕様が異
使用電圧範囲 DC4.5~5.5V なるため,接続機器の仕
様の確認が必要です。実
ON電圧/電流 DC2.7V以上/5.5mA以上 際のシステムで確認して
OFF電圧/電流 DC1.0V以下/0.5mA以下 ください。
入力抵抗 約390 約270
応答時間 0.1ms以下
最小パルス幅 0.1ms以上
近点ドグ信号 定格入力電圧/電流 DC24V/5mA
(DOG) 使用電圧範囲 DC19.2~26.4V
ON電圧/電流 DC17.5V以上/3.0mA以上
OFF電圧/電流 DC7.0V以下/0.9mA以下
入力抵抗 約6.8k
応答時間 1ms以下
上限リミット信 定格入力電圧/電流 DC24V/5mA 上限リミット信号(FLS),
号(FLS) 使用電圧範囲 DC19.2~26.4V 下限リミット信号(RLS)
下限リミット信 はありません。
号(RLS) ON電圧/電流 DC17.5V以上/3.0mA以上 上限リミット信号(FLS),
OFF電圧/電流 DC7.0V以下/0.9mA以下 下限リミット信号(RLS)
入力抵抗 約6.8k をご使用の場合,代替機
種はQD75PNを選定し
応答時間 1ms以下 てください。
ドライブユニット間の最大接続距離 2m
■その他
: 互換性あり
項目 生産中止機種 代替機種 互換性 置換え時の留意点
QD72P3C3 QD70P4
周辺機器/対応ユーティリティパッケージ • GX Works2 (別売)
• GX Developer (別売)
• GX Configurator-PT (別売)
データバックアップ なし
外部機器接続用コネクタ A6CON1,A6CON2,A6CON4 (別売)
適合電線サイズ A6CON1,A6CON4使用 0.3(AWG22)以下 0.3(AWG22)
時
A6CON2使用時 0.24(AWG24) 0.088~0.24(AWG28~AW
G24)
内部消費電流(DC5V) 0.57A 0.55A
入出力占有点数 32点(I/O割付: インテリ32点)
Page13
テクニカルニュース [ 13 / 26 ]
FA-D-0287-A項目 生産中止機種 代替機種 互換性 置換え時の留意点
QD72P3C3 QD70P4
外形寸法 高さ(H) 98mm
幅(W) 27.4mm
奥行き(D) 90mm
質量 0.16kg 0.15kg
Page14
テクニカルニュース [ 14 / 26 ]
FA-D-0287-A機能の比較
: 機能あり,: 機能なし
制御方式/機能名 内容 生産中止機種 代替機種 置換え時の留意点
QD72P3C3 QD70P4
原点復帰制御 機械原点復帰制御 近点ドグやストッパなどによって,機械的
に位置決め制御の基準点を確立します。
高速原点復帰制御 機械原点復帰制御によって位置決めユニッ
トに格納された原点アドレスへ位置決め制
御を行います。
原点復帰時のカウン 原点復帰完了時に,原点アドレスを“[Md.3] 互換性がないため,代用
ト値選択機能 カウント値”に格納する機能です。 方法を確認してくださ
い。*1
位置決め制御 位置制御(1軸直線制 位置決めデータに設定したアドレスまたは
御) 移動量によって,指定した位置に位置決め
制御を行います。
速度制御 位置決めデータに設定した“[Da.4]指令速度” 速度制御を使用する場
に応じたパルスを連続して出力します。 合,代替機種は
QD75PNを選定してく
ださい。
現在値変更 “[Md.1]送り現在値”を位置決めデータに設定
したアドレスに変更します。
JOG運転 JOG始動信号がONしている間だけ,パルス
をドライブユニットへ出力します。
補助機能 速度制限機能 制御中に指令速度が“[Pr.4]速度制限値”を超
えるような場合,指令速度を“[Pr.4]速度制
限値”の設定範囲内に制限する機能です。
速度変更機能 速度制御の定速中,JOG運転の定速中に速
度を変更する機能です。
ソフトウェアスト パラメータに設定されている上限/下限スト
ロークリミット機能 ロークリミットの設定範囲外への指令が与
えられたとき,その指令に対する運転を実
行しない機能です。
ハードウェアスト 位置決めユニットに接続したリミットス ハードウェアストローク
ロークリミット機能 イッチによって,減速停止を行う機能です。 リミット機能を使用する
場合,代替機種は
QD75PNを選定してく
ださい。
加減速処理機能 制御の加減速処理調整をする機能です。
共通機能 外部入出力信号論理 外部に接続された機器に合わせて外部入出
切換え機能 力信号の論理を切り換える機能です。イン
テリジェント機能ユニットスイッチの設定
で切換え可能です。
外部入出力信号モニ プログラミングツールにより,外部入出力
タ機能 信号の状態をモニタする機能です。
*1 QD70P4には,原点復帰制御の原点復帰時のカウント値選択機能がありません。原点復帰完了信号ONのタイミングで,位置決めユ
ニットの送り現在値をカウンタユニットのプリセット値に設定し,カウンタユニットのプリセット機能を実行することで代用が可能
です。
Page15
テクニカルニュース [ 15 / 26 ]
FA-D-0287-A入出力信号の比較
シーケンサCPUとの入出力信号が異なるため,シーケンスプログラムの変更が必要です。シーケンサCPUとの入出力信号お
よびシーケンスプログラムの詳細は,下記を参照してください。
QD70形位置決めユニットユーザーズマニュアル(詳細編)
信号方向: ユニットシーケンサCPU 信号方向: シーケンサCPUユニット
デバイス 信号名称 デバイス 信号名称
No. 生産中止機種 代替機種 No. 生産中止機種 代替機種
QD72P3C3 QD70P4 QD72P3C3 QD70P4
X0 ユニットREADY Y0 シーケンサREADY
X1 軸1/CH1 エラー発生 軸エラー発生 Y1 軸1/CH1 エラーリセット 使用禁止
X2 軸2/CH2 エラー発生 軸ワーニング発生 Y2 軸2/CH2 エラーリセット
X3 軸3/CH3 エラー発生 使用禁止 Y3 軸3/CH3 エラーリセット
X4 軸1/CH1 ワーニング発生 Y4 軸1 停止
X5 軸2/CH2 ワーニング発生 Y5 軸2 停止
X6 軸3/CH3 ワーニング発生 Y6 軸3 停止
X7 使用禁止 Y7 使用禁止
X8 軸1 BUSY Y8 軸1 位置決め始動 軸1 位置決め始動
X9 軸2 BUSY Y9 軸2 位置決め始動 軸2 位置決め始動
XA 軸3 BUSY YA 軸3 位置決め始動 軸3 位置決め始動
XB 使用禁止 軸4 BUSY YB 使用禁止 軸4 位置決め始動
XC 軸1 始動完了 使用禁止 YC 軸1 正転JOG始動 使用禁止
XD 軸2 始動完了 YD 軸1 逆転JOG始動
XE 軸3 始動完了 YE 軸2 正転JOG始動
XF 使用禁止 YF 軸2 逆転JOG始動
X10 軸1 位置決め完了 軸1 始動完了 Y10 軸3 正転JOG始動 軸1 軸停止
X11 軸2 位置決め完了 軸2 始動完了 Y11 軸3 逆転JOG始動 軸2 軸停止
X12 軸3 位置決め完了 軸3 始動完了 Y12 使用禁止 軸3 軸停止
X13 使用禁止 軸4 始動完了 Y13 軸4 軸停止
X14 CH1 カウント値大 使用禁止 Y14 CH1 一致信号リセット指令 使用禁止
X15 CH1 カウント値一致 Y15 CH2 一致信号リセット指令
X16 CH1 カウント値小 Y16 CH3 一致信号リセット指令
X17 使用禁止 Y17 使用禁止
X18 CH2 カウント値大 軸1 位置決め完了 Y18 CH1 プリセット指令 軸1 JOG始動
X19 CH2 カウント値一致 軸2 位置決め完了 Y19 CH2 プリセット指令 軸2 JOG始動
X1A CH2 カウント値小 軸3 位置決め完了 Y1A CH3 プリセット指令 軸3 JOG始動
X1B 使用禁止 軸4 位置決め完了 Y1B 使用禁止 軸4 JOG始動
X1C CH3 カウント値大 使用禁止 Y1C CH1 カウントイネーブル指令 使用禁止
X1D CH3 カウント値一致 Y1D CH2 カウントイネーブル指令
X1E CH3 カウント値小 Y1E CH3 カウントイネーブル指令
X1F 使用禁止 Y1F 使用禁止
Page16
テクニカルニュース [ 16 / 26 ]
FA-D-0287-Aバッファメモリの比較
バッファメモリの割付けが異なるため,シーケンスプログラムの変更が必要です。バッファメモリおよびシーケンスプログ
ラムの詳細は,下記を参照してください。
QD70形位置決めユニットユーザーズマニュアル(詳細編)
QD72P3C3の項目 バッファメモリアドレス
生産中止機種 代替機種
QD72P3C3 QD70P4
軸1/CH1 軸2/CH2 軸3/CH3 軸1 軸2 軸3 軸4
[Pr.1] ソフトウェアストロークリミット上限値 0 100 200 0 100 200 300
1 101 201 1 101 201 301
[Pr.2] ソフトウェアストロークリミット下限値 2 102 202 2 102 202 302
3 103 203 3 103 203 303
[Pr.3] 速度制御時の送り現在値 5 105 205 5 105 205 305
[Pr.4] 速度制限値 6 106 206 6 106 206 306
7 107 207 7 107 207 307
[Pr.5] 始動時バイアス速度 8 108 208 8 108 208 308
9 109 209 9 109 209 309
[Pr.6] 位置決め完了信号出力時間 10 110 210 10 110 210 310
[Pr.7] 偏差カウンタクリア信号出力時間 11 111 211 11 111 211 311
[Pr.9] 送り現在値・カウント値同時変更機能選択 13 113 213
[Pr.10] 原点復帰方式 20 120 220 20 120 220 320
[Pr.11] 原点復帰方向 21 121 221 21 121 221 321
[Pr.12] 原点アドレス 22 122 222 22 122 222 322
23 123 223 23 123 223 323
[Pr.13] 原点復帰速度 24 124 224 24 124 224 324
25 125 225 25 125 225 325
[Pr.14] クリープ速度 26 126 226 26 126 226 326
27 127 227 27 127 227 327
[Pr.15] 原点復帰加減速時間*1 28 128 228 28 128 228 328
(QD70P4では“原点復帰加減速時間”,“原点復帰減速停止時間”) 29 129 229 329
[Pr.16] リングカウンタ上限値 30 130 230
31 131 231
[Pr.17] 位置決め範囲上限値 32 132 232
33 133 233
[Pr.18] 一致検出設定 34 134 234
[Pr.19] 原点復帰時のカウント値選択 35 135 235
[JOG.1] JOG速度 40 140 240 40 140 240 340
41 141 241 41 141 241 341
[JOG.2] JOG加減速時間*2 42 142 242 42 142 242 342
(QD70P4では“JOG加速時間”,“JOG減速時間”) 43 143 243 343
[Da.1] 運転パターン 90 190 290 800 900 1000 1100
[Da.2] 制御方式 91 191 291 801 901 1001 1101
[Da.3] 加減速時間*3 92 192 292 802 902 1002 1102
(QD70P4では“加減速時間”,“減速停止時間”) 803 903 1003 1103
[Da.4] 指令速度 94 194 294 804 904 1004 1104
95 195 295 805 905 1005 1105
[Da.5] 位置決めアドレス/移動量 96 196 296 806 906 1006 1106
97 197 297 807 907 1007 1107
[Md.1] 送り現在値 70 170 270 70 170 270 370
71 171 271 71 171 271 371
Page17
テクニカルニュース [ 17 / 26 ]
FA-D-0287-AQD72P3C3の項目 バッファメモリアドレス
生産中止機種 代替機種
QD72P3C3 QD70P4
軸1/CH1 軸2/CH2 軸3/CH3 軸1 軸2 軸3 軸4
[Md.2] 現在速度 72 172 272 74 174 274 374
73 173 273 75 175 275 375
[Md.3] カウント値 74 174 274
75 175 275
[Md.4] 軸動作状態 76 176 276 76 176 276 376
[Md.5] 軸/CHエラーコード 77 177 277 77 177 277 377
(QD70P4では“軸エラーコード”)
[Md.6] 軸/CHワーニングコード 78 178 278 78 178 278 378
(QD70P4では“軸ワーニングコード”)
[Md.7] ステータス 79 179 279 79 179 279 379
[Md.8] 外部入出力信号 80 180 280 80 180 280 380
[Cd.1] 速度変更値 50 150 250 56 156 256 356
51 151 251 57 157 257 357
[Cd.2] 速度変更時加減速時間*4 52 152 252 58 158 258 358
(QD70P4では“速度変更時加減速時間”,“速度変更時減速停止時間”) 59 159 259 359
[Cd.3] 速度変更要求 54 154 254 55 155 255 355
[Cd.4] 原点復帰要求フラグOFF要求 55 155 255 51 151 251 351
[Cd.5] 始動種別 56 156 256 52 152 252 352
[Cd.6] プリセット値設定 60 160 260
61 161 261
[Cd.7] 一致検出ポイント設定 62 162 262
63 163 263
*1 QD70P4では,原点復帰加減速時間と原点復帰減速停止時間を個別に設定が必要です。
*2 QD70P4では,JOG加速時間とJOG減速時間を個別に設定が必要です。
*3 QD70P4では,加減速時間と減速停止時間を個別に設定が必要です。
*4 QD70P4では,速度変更時加減速時間と速度変更時減速停止時間を個別に設定が必要です。
Page18
テクニカルニュース [ 18 / 26 ]
FA-D-0287-A外観,外部機器接続用コネクタの信号配列
生産中止機種 代替機種
QD72P3C3 QD70P4
外観 外観
*1 *1
*2 *2
ピン配列(ユニット正面から見た場合)
B20 A20
B19 A19
B18 A18
B17 A17
B16 A16
B15 A15
B14 A14
B13 A13
B12 A12
B11 A11
B10 A10
B9 A9
B8 A8
B7 A7
B6 A6
B5 A5
B4 A4
B3 A3
B2 A2
B1 A1
外部機器接続用コネクタの信号配列 外部機器接続用コネクタの信号配列
CON2(軸3用) CON1(軸1,軸2用) CON1(軸1~4用)
ピン 信号名称 ピン 信号名称 ピン 信号名称 ピン 信号名称 ピン 信号名称 ピン 信号名称
No. No. No. No. No. No.
B20 NC A20 CH3A_24V B20 CH2A_24V A20 CH1A_24V B20 PG02 COM A20 PG04 COM
B19 NC A19 CH3A_5V B19 CH2A_5V A19 CH1A_5V B19 PG02 A19 PG04
B18 NC A18 CH3A COM B18 CH2A COM A18 CH1A COM B18 PG01 COM A18 PG03 COM
B17 NC A17 CH3B_24V B17 CH2B_24V A17 CH1B_24V B17 PG01 A17 PG03
B16 NC A16 CH3B_5V B16 CH2B_5V A16 CH1B_5V B16 CLEAR2 COM A16 CLEAR4 COM
B15 NC A15 CH3B COM B15 CH2B COM A15 CH1B COM B15 CLEAR2 A15 CLEAR4
B14 NC A14 PG03 B14 PG02 A14 PG01 B14 CLEAR1 COM A14 CLEAR3 COM
B13 NC A13 PG03 COM B13 PG02 COM A13 PG01 COM B13 CLEAR1 A13 CLEAR3
B12 NC A12 CLEAR3 B12 CLEAR2 A12 CLEAR1 B12 CHG2 A12 CHG4
B11 NC A11 CLEAR3 COM B11 CLEAR2 COM A11 CLEAR1 COM B11 CHG1 A11 CHG3
B10 NC A10 DOG3 B10 DOG2 A10 DOG1 B10 DOG2 A10 DOG4
B9 NC A9 COM1-3 B9 COM1-3 A9 COM1-3 B9 DOG1 A9 DOG3
B8 NC A8 FLS3 B8 FLS2 A8 FLS1 B8 COM 1-2 A8 COM 3-4
B7 NC A7 COM1-3 B7 COM1-3 A7 COM1-3 B7 PULSE F2 A7 PULSE F4
B6 NC A6 RLS3 B6 RLS2 A6 RLS1 B6 PULSE COM2 A6 PULSE COM4
B5 NC A5 COM1-3 B5 COM1-3 A5 COM1-3 B5 PULSE R2 A5 PULSE R4
B4 NC A4 PULSE F3 B4 PULSE F2 A4 PULSE F1 B4 PULSE F1 A4 PULSE F3
B3 NC A3 PULSE COM1-3 B3 PULSE COM1-3 A3 PULSE COM1-3 B3 PULSE COM1 A3 PULSE COM3
B2 NC A2 PULSE R3 B2 PULSE R2 A2 PULSE R1 B2 PULSE R1 A2 PULSE R3
B1 NC A1 PULSE COM1-3 B1 PULSE COM1-3 A1 PULSE COM1-3 B1 +24V A1 24G
*1 LED表示が異なります。
*2 外部機器接続用コネクタの信号配列が異なるため,置換え時は配線の変更が必要です。
Page19
5.3 QD62
テクニカルニュース [ 19 / 26 ]
FA-D-0287-A5.3 QD62
生産中止機種 代替機種
品名 形名 品名 形名
カウンタ機能内蔵位置決めユニット QD72P3C3 高速カウンタユニット QD62
性能仕様の比較
: 互換性あり,: 代替可能ですが確認が必要
項目 生産中止機種 代替機種 互換性 置換え時の留意点
QD72P3C3 QD62
チャンネル数 3チャンネル 2チャンネル 3チャンネル使用の
場合は,QD62の2台
使用をご検討くださ
い。
カウンタ 計数速度(最高) 100kpps 200kpps
機能 計数範囲 31ビット符号付きバイナリ 32ビット符号付きバイナリ
[リニアカウンタ] [リニアカウンタ]
-1073741824~1073741823 -2147483648~2147483647
[リングカウンタ] [リングカウンタ]
0~1073741823 -2147483648~2147483647
入力仕様 DC5V A相パルス入 定格入力電圧/電流 DC5V/18mA DC5V/5mA インタフェース仕様
力 使用電圧範囲 DC4.5~5.5V が異なるため,接続
B相パルス入 機器の仕様を確認し
力 ON電圧/電流 DC2.7V以上/5.5mA以上 DC4.5V以上/2mA以上 てください。
OFF電圧/電流 DC1.0V以下/0.5mA以下 DC2.0V以下/0.1mA以下
入力抵抗 約390 約470
DC24V 定格入力電圧/電流 DC24V/2~6mA DC24V/2~5mA
使用電圧範囲 DC21.6~26.4V
ON電圧/電流 DC21.6V以上/2mA以上
OFF電圧/電流 DC5V以下/0.1mA以下
入力抵抗 約3900+390 約4700
外部接続方式 40ピンコネクタ
周辺機器/対応ユーティリティパッケージ • GX Works2 (別売) • GX Works2 (別売) 対応するプログラミ
• GX Developer (別売) • GX Developer (別売) ングツールを使用し
• GX Configurator-PT (別売) • GX Configurator-CT (別売) てください。
データバックアップ なし
外部機器接続用コネクタ A6CON1,A6CON2, A6CON1,A6CON2,
A6CON4 (別売) A6CON3,A6CON4 (別売)
適合電線サイズ A6CON1,A6CON4使用時 0.3(AWG22)以下 0.3(AWG22)(より線)
A6CON2使用時 0.24(AWG24) 0.088~0.24(AWG28~AW
G24)(より線)
内部消費電流(DC5V) 0.57A 0.30A QD62を2台使用する
場合は,内部消費電
流の増加を考慮して
ください。
入出力占有点数 32点(I/O割付: インテリ32点) 16点(I/O割付: インテリ16点) 入出力占有点数が異
なるため,シーケン
スプログラムの変更
が必要です。
外形寸法 高さ(H) 98mm
幅(W) 27.4mm
奥行き(D) 90mm
質量 0.16kg 0.11kg QD62を2台使用する
場合は,総重量の増
加を考慮してくださ
い。
Page20
テクニカルニュース [ 20 / 26 ]
FA-D-0287-A機能の比較
: 機能あり,: 機能なし
機能名 内容 生産中止機種 代替機種 置換え時の留意点
QD72P3C3 QD62
カウンタ機能 リニアカウンタ機能 -1073741824~1073741823までカウントが
可能で,カウント範囲を超えたらオーバフ
ローを検出する機能です。
リングカウンタ機能 0から“[Pr.16]リングカウンタ上限値”の間で
繰り返しカウントを行う機能です。
リングカウンタ機能を使用する場合,位置
決め制御範囲は0~1073741823(pulse)とな
ります。
カウントイネーブル機能 カウントイネーブル指令(Y1C~Y1E)のON中
にパルスをカウントする機能です。
一致検出機能 任意チャンネルの“[Cd.7]一致検出ポイント
設定”をあらかじめ設定しておき,“[Md.3]カ
ウント値”と比較してON/OFF信号を出力す
る機能です。
プリセット機能 “[Md.3]カウント値”を任意の数値に書き換え
る機能です。
送り現在値・カウント値同 現在値変更時またはプリセット時に“[Md.1] 互換性がないため,代用方
時変更機能 送り現在値”と“[Md.3]カウント値”を同じ値 法を確認してください。*1
に変更する機能です。
*1 QD62には,カウント機能の送り現在値・カウント値同時変更機能がありません。位置決めユニットの現在値変更機能と高速カウンタ
ユニットのプリセット機能を同時実行することで代用が可能です。ただし,シーケンスプログラムの実行時間分だけタイミングにズ
レが生じます。