



エレシリンダー®グリッパータイプ EC-GRB8/GRB10/GRB13をご紹介
<主な特長>
①簡単設定
②ケーブルの取回しが容易
③コントローラー内蔵
④低価格
⑤つのバリエーションをご用意
このカタログについて
| ドキュメント名 | エレシリンダー®グリッパータイプ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 7.9Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社アイエイアイ (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
表紙
EC-GRB8
GRB10
エレシリンダー® グリッパータイプ GRB13
Simple & Wireless Operation
2 Position Actuator
Page2
特長
2 点位置決め ®
コントローラー内蔵 エレシリンダー
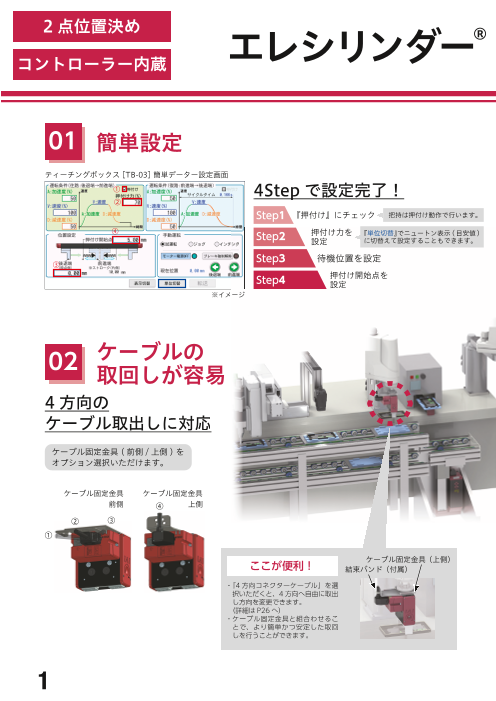
01 簡単設定
ティーチングボックス [TB-03] 簡単データー設定画面
① 4Step で設定完了!
②
Step1 『押付け』にチェック 把持は押付け動作で行います。
④ Step2 押付け力を 『単位切替』でニュートン表示(目安値)設定 に切替えて設定することもできます。
Step3 待機位置を設定
③
Step4 押付け開始点を設定
※イメージ
02 ケーブルの取回しが容易
4 方向の
ケーブル取出しに対応
ケーブル固定金具 (前側 /上側 )を
オプション選択いただけます。
ケーブル固定金具 ケーブル固定金具
前側 ④ 上側
② ③
①
ここが便利! ケーブル固定金具(上側)結束バンド(付属)
・『 4 方向コネクターケーブル』を選
択いただくと、4方向へ自由に取出
し方向を変更できます。
(詳細は P26へ)
・ケ ーブル固定金具と組合わせるこ
とで、より簡単かつ安定した取回
しを行うことができます。
1
Page3
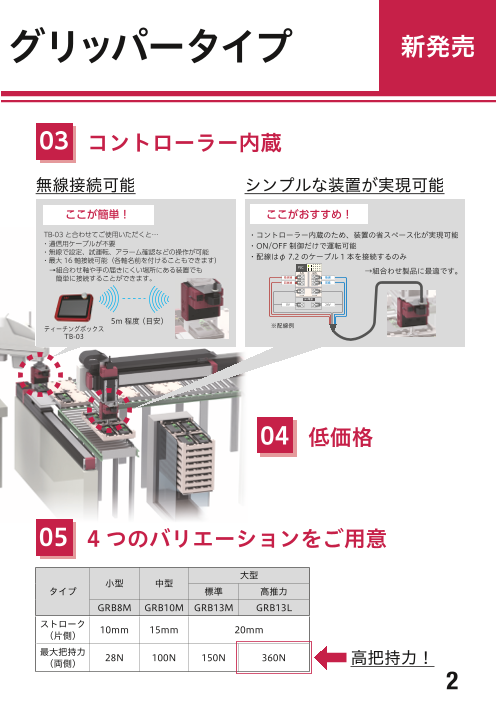
グリッパータイプ 新発売
03 コントローラー内蔵
無線接続可能 シンプルな装置が実現可能
ここが簡単! ここがおすすめ!
TB-03 と合わせてご使用いただくと… ・コントローラー内蔵のため、装置の省スペース化が実現可能
・通信用ケーブルが不要 ・ ON/OFF 制御だけで運転可能
・無線で設定、試運転、アラーム確認などの操作が可能
・最大 16軸接続可能(各軸名前を付けることもできます) ・ 配線はφ 7.2 のケーブル 1本を接続するのみ
→組合わせ軸や手の届きにくい場所にある装置でも PLC入力 出力 →組合わせ製品に最適です。
簡単に接続することができます。 後退端 後退
前進端 前進
-COM +COM
24V電源
0V 24V
5m程度(目安)
ティーチングボックス ※配線例
TB-03
04 低価格
05 4つのバリエーションをご用意
大型
小型 中型
タイプ 標準 高推力
GRB8M GRB10M GRB13M GRB13L
ストローク
(片側) 10mm 15mm 20mm
最大把持力
(両側) 28N 100N 150N 360N 高把持力!
2
Page4
型式項目
型式項目
エレシリンダー®
EC - - - -
シリーズ タイプ 減速比 ストローク(両側) 電源・I/Oケーブル長 オプション
<GRB8>
GRB8 グリッパー 82mm幅 台形ねじ 0 ケーブルなし
M リード 1.5mm 電源I/Oコネクター付属(注)
プーリー減速比 1.5
GRB10 グリッパー 98mm幅 (S)1 1m
GRB13 グリッパー 130mm幅 <GRB10>
台形ねじ
M リード 1.5mm (S)10 10m
プーリー減速比 1.15 (1mごと)
(S): 4方向コネクター付きケーブル
(注) RCON-EC接続仕様(ACR)選択
<GRB13> 時は、電源I/Oコネクターが付属し
台形ねじ ません
M 標準 リード 2mm
プーリー減速比 1.25
台形ねじ
L 高推力 リード 2mm
プーリー減速比 2.50
<GRB8>
20 20mm インクリメンタルエンコーダー仕様(片側10mm) 無記入 NPN仕様、オプションなし
ACR RCON-EC接続仕様 ※1
<GRB10>
30mm FST ケーブル固定金具(前側)30 (片側15mm)
NM 原点逆仕様
<GRB13> PN PNP仕様 ※1
40 40mm(片側20mm) TMD2 電源2系統仕様 ※1
TST ケーブル固定金具(上側) ※2
WA バッテリーレスアブソリュートエンコーダー仕様 ※3
WL 無線通信仕様
WL2 無線軸動作対応仕様
※1 「ACR」選択時は、「PN」および「TMD2」
を選択できません
※2 4方向コネクター付きケーブル選択時の
み選択できます
※3 GRB10、GRB13のみ選択できます
3
~
~
Page5
取付け方法、取付け上の注意点
取付け方法
●取付け面A ねじ穴固定 ●取付け面B ねじ穴固定 ●取付け面B 通し穴固定
止めねじ(4個)
GRB10/GRB13の場合
取外してください。※
取付け面A
取付け面B
取付け面B
※異物侵入防止のため、セットスクリューで埋栓されています。
取付け上の注意点
●取付け姿勢
○:設置可能
取付け姿勢
シリーズ タイプ 水平平置き設置 垂直設置 水平横立て設置 水平天吊り設置
GRB8
EC GRB10 ○ ○ ○ ○
GRB13
●本体設置面、ワーク取付け面の平面度は0.05mm/m以内としてください。
平面度が大きい場合、フィンガーの摺動抵抗が増大し、動作不良の原因となります。
4
Page6
グリッパー選定方法
グリッパー選定方法
選定の流れ 手順1 必要把持力、搬送できるワーク質量の確認
把持力による摩擦力でワークをグリップする場合、必要把持力は下記のように算出します。
手順1 ① 通常搬送の場合
必要把持力、搬送できる F: 把持力( N)……各フィンガー押付け力の合計値
μ: フィンガーアタッチメントとワーク間の静摩擦係数
ワーク質量の確認 m: ワーク質量( kg)
g: 重力加速度( =9.8m/s2)
●ワークを静的に把持し、ワークが落下しない条件は F/2 F/2
mg
Fμ>mg F>
μ 摩擦係数μ
●通常搬送における推奨安全率2とすると必要把持力は
手順2 mgF> ×2(安全率) W(=m・g)
μ
把持点距離の確認 ●摩擦係数μ0.1~0.2の時
mg
F> ×2=(10~20)×mg
0.1~0.2
通常のワーク搬送の場合(目安) ※ 静摩擦係数が大きいほど搬送で
きるワーク質量は大きくなりま
必要把持力 ワーク質量の10~20倍以上 すが、安全を見て10~20倍以
搬送出来るワーク質量 把持力の1/10~1/20以下 上の把持力が得られるような機
種を選択してください。
手順3 ② ワーク移送時に大きな加減速、衝撃力が加わる場合
重力に加えてさらに強い慣性力がワークに働きます。
このような場合、さらに安全率を大きくとって機種を選定してください。
フィンガーに掛かる外力の確認
大きな加減速度、衝撃が加わる場合(目安)
必要把持力 ワーク質量の30~50倍以上
搬送出来るワーク質量 把持力の1/30~1/50以下
手順2 把持点距離の確認
フィンガー取付け面から把持ポイントまでの距離(L、H)を下記の範囲内となるようにご使
用ください。制限範囲を超えた場合、フィンガー摺動部および内部メカに過大なモーメント
が作用して、寿命に悪影響を及ぼす原因となります。
EC-GRB8M EC-GRB10M <把持点までの距離>
160 160
オ140 オ140
ー 把持電流20~70% ー 把持電流20~30%120
バ バ
120
ー100 ー100
ハ ハ
ン80 ン80
把持電流40%
グ60 グ60 把持電流50%
量 量
H 40 H 40
把持電流60%
(mm)20 (mm)20
把持電流70% L0 0
0 20 40 60 80 100 120 140 160 0 20 40 60 80 100 120 140 160
把持点 L(mm) 把持点 L(mm)
把持ポイント H
EC-GRB13M EC-GRB13L <モーメント オフセット基準位置>
160 160
オ140 オ140 把持電流20%
ー ー 把持電流30%
バ120 バ120
ー100 把持電流20~40% ー100 把持電流40%
ハ ハ
80 把持電流70%ン ン80
グ60 把持電流50% グ60 把持電流50%量
H 40 把持電流60%
量
H 40 把持電流60%
(mm) 把持電流70%20 (mm)20
0 0 モーメント 16 1.5 モーメント 18 1.5
0 20 40 60 80 100 120 140 160 0 20 40 60 80 100 120 140 160 オフセット基準位置 オフセット基準位置
把持点 L(mm) 把持点 L(mm)
EC-GRB8 EC-GRB10/13
把持点距離が制限範囲内であっても、フィンガーアタッチメントはできるだけ小形、軽量に
してください。
フィンガーが長く大きい場合や、質量が大きい場合は、開閉時の慣性力と曲げモーメント
により、性能低下やガイド部に悪影響を与える場合があります。
5
7 77
7 85
Page7
グリッパー選定方法
手順3 フィンガーに掛かる外力の確認
① 垂直方向許容荷重
各フィンガーに掛かる垂直方向許容荷重が許容値以下であることを確認
してください。
② 許容負荷モーメント
Ma、Mcは、L、Mbは、Hで計算してください。各フィンガーに掛かる
モーメントが最大許容負荷モーメント以下であることを確認してください。
Ma
●各フィンガーにモーメント荷重が掛かった時の許容外力は F L Mc
最大許容負荷モーメント(N・m)
垂直方向許容荷重 F(N)> 把持ポイント H
LまたはH(mm)×10-3
Mb
垂直方向許容荷重 F(N)は、L、Hとも算出してください。
フィンガーに掛かる外力が算出した垂直方向許容荷重 F(N()L、Hの
小さい方の値)以下であることを確認してください。
型 式 垂直方向許容 最大許容負荷モーメント(N・m)荷重F(N) Ma Mb Mc
EC-GRB8 598 3.60 3.60 10.2
EC-GRB10 598 3.60 3.60 10.2
EC-GRB13 898 7.52 7.52 15.3
1. 上記許容値は静的な値を示します。 2. フィンガー1個当たりの許容値を示します。
※上記負荷ポイントはフィンガーにかかる負荷の位置を示します。
※フィンガーの重量及びワーク重量も外力の一部となります。 負荷の種類により位置は異なります。
また、ワークを把持した状態でグリッパーを旋回させた時の遠心力、 ・把持力による負荷:把持ポイント
移動時の加減速による慣性力もフィンガーに掛かる外力となります。 ・重力による負荷:重心位置
・移動時の慣性力、旋回時の遠心力:重心位置
負荷モーメントは負荷の種類ごとに計算した合計値となります。
把持点距離と把持力の目安
1. グラフは最大把持力を100%とした時の把持点距離による把持力を示しています。
2. 把持点距離はフィンガーアタッチメント取付け面から把持点までの距離(LまたはH)を示します。
3. 把持力は個体差によりバラツキがあります。あくまでも目安としてご使用ください。
EC-GRB8M EC-GRB10M/13M/13L
100 100
90 90
80 80
70 70
把60 把60
持50 持力 力50
(%)40 (%)40
30 30
20 20
10 10
0 0
0 20 40 60 80 100 120 140 160 0 20 40 60 80 100 120 140 160
把持点距離LまたはH(mm) 把持点距離LまたはH(mm)
6
Page8
EC、EC-GRB8
EC エレシリンダーⓇ
EC-GRB8 本体幅スライド 2ツ爪 80 24Vパルスmm モーター
■ 型式項目
E C - G RB8 M - 2 0 - -
シリーズ - タイプ 減速比 - ストローク - 電源・I/Oケーブル長 - オプション
台形ねじ 20 20mm 下記電源・I/Oケーブル長 下記オプション
M リード1.5mm (片側10mm) 価格表参照 価格表参照
プーリー減速比1.5
水 平 垂 横立て
直 天吊り
■ ストローク別価格表(標準価格) (1)「メインスペック」の開閉最高速度は片側の動作速度を表します。相対
ストローク(mm) 標準価格 動作速度は 2 倍の値となります。
20 - (2)「メインスペック」の最大把持力は、把持点距離 0、オーバーハング距
離0の場合の両フィンガー把持力の合計値です。実際に搬送出来るワー
■ オプション価格表(標準価格) 選定上の ク質量は、「把持点距離の確認」をご参照ください。注意 (3)ワークを把持する際は必ず押付け動作をご使用ください。
名称 オプション記号 参照頁 標準価格 (4)セルフロックにより、電源遮断時においてもワーク把持力を維持します。
RCON-EC接続仕様(注1) ACR 19 - 電源遮断時に把持中のワークを除去する際は、側面の開閉ねじを回す
ケーブル固定金具(前側) FST 19 - か、フィンガーアタッチメントを取外してワークを除去してください。
原点逆仕様 NM 19 -
PNP仕様 PN 1 9 -
電源2系統仕様 TMD2 20 -
ケーブル固定金具(上側)(注2) TST 2 0 -
無線通信仕様 WL 2 0 -
無線軸動作対応仕様 WL2 2 0 -
(注1) RCON-EC接続仕様(ACR)選択時は、PNP仕様(PN)および電源2系統仕様(TMD2)を選択で
きません。
(注2) 4方向コネクターケーブル選択時のみ選択できます。
■ 電源・I/Oケーブル長価格表(標準価格)
■ 標準コネクターケーブル
ユーザー配線仕様 RCON-EC接続仕様(注4)
ケーブル記号 ケーブル長 ( バラ線) (両端コネクター付き)
CB-EC-PWBIO□□□-RB付属 CB-REC-PWBIO□□□-RB付属
0 ケーブルなし - (注3) -
1 ~ 3 1 ~ 3m - -
4 ~ 5 4~ 5m - -
6 ~ 7 6 ~ 7m - -
8 ~ 10 8 ~ 10m - -
(注3) 端子台コネクターのみ付属します。詳細は 23 ページをご確認ください。
(注4) オプションでRCON-EC接続仕様(ACR)を選択した場合です。
(注) ロボットケーブルです。
■ 4方向コネクターケーブル
ユーザー配線仕様 RCON-EC接続仕様(注5)
ケーブル記号 ケーブル長 ( バラ線) (両端コネクター付き)
CB-EC2-PWBIO□□□-RB付属 CB-REC2-PWBIO□□□-RB付属
S1 ~S3 1 ~ 3m - -
S4 ~ S5 4~ 5m - -
S 6 ~ S7 6 ~ 7m - -
S8 ~ S10 8 ~ 10m - -
(注5) オプションでRCON-EC接続仕様(ACR)を選択した場合です。
(注) ロボットケーブルです。
7 EC-GRB8
Page9
お問合せは
0800-888-0088 EC エレシリンダーⓇ
■ メインスペック
項目 内容 項目 内容
リード 台形ねじリード(mm) 1.5 駆動方式 台形ねじ φ8プーリー減速比 1.5 繰返し位置決め精度 ±0.05 mm
把持動作 最大把持力(N)(両側) 28 ロストモーション -(2点間位置決め機能のため、表記できません。)把持動作時の最高速度(mm/s()片側) 5 バックラッシ(片側) 0.2mm以下
最高速度(mm/s)(片側) 45 リニアガイド 有限ガイド
アプローチ動作 最低速度(mm/s()片側) 5 Ma : 3.60 N・m定格加減速度(G()片側) 0.3 静的許容モーメント Mb : 3.60 N・m
最高加減速度(G)(片側) 0.3 Mc : 10.2 N・m
ブレーキ ブレーキ仕様 - 垂直方向許容荷重(注6) 598Nブレーキ保持力(kgf) - 使用周囲温度・湿度 0~40℃、85%RH以下(結露なきこと)
ストローク(片側) 最小ストローク(mm)(片側) 10 保護等級 -最大ストローク(mm)(片側) 10 耐振動・耐衝撃 4.9m/s2
海外対応規格 CEマーク、RoHS指令
モーター種類 パルスモーター(□20)
エンコーダー種類 インクリメンタル(バッテリーレスアブソリュートオプションは設定なし)
エンコーダーパルス数 800 pulse/rev
納期 ホームページ[納期照会]に記載
(注6) 上記値を超える負荷で使用した場合、寿命低下、破損の原因となります。
■ スライドタイプモーメント方向
Ma
Mb Mc
■ 把持点距離の確認
フィンガー(爪)取付け面から把持ポイントまでの距離(L、H)をグラフの範囲内となるようにご使用ください。
GRB8M
160
オ140
ー 把持電流20~70%120
バ
ー100
ハ
ン80
グ60
L 量
H 40
(mm)20
把持ポイント H 0
0 20 40 60 80 100 120 140 160
把持点 L(mm)
(注) 制限範囲を超えた場合はフィンガー摺動部および内部メカ
に過大なモーメントが作用して、寿命に悪影響を及ぼす原
因となります。
■ 把持力
■把持力と電流制限値の相関図 ■把持点距離と把持力の目安
GRB8M ■ 推奨領域 GRB8M
30 100
90
25 80
20 70
把 把60
持 持
力15 力50
(N) 40
10 (%)30
5 20
10
0 0
0 10 20 30 40 50 60 70 80 0 20 40 60 80 100 120 140 160
電流制限値(%) 把持点距離LまたはH(mm)
(注) 把持点距離(L、H)を0とした場合の、両フィンガーの合計 (注) 最大把持力を100%とした時の張出し位置による把持力を
値です。 示しています。使用するフィンガーアタッチメントの剛性
(注) 目安の数字です。0~60%程度のばらつきがあります。特 により結果が異なる可能性があります。
に推奨領域(グラフ着色域)外の電流制限値を設定した場
合、ばらつきの可能性が高くなります。
(注) 把持(押付け)を行う場合は、速度が5mm/s固定となりま
す。
EC-GRB8 8
Page10
EC エレシリンダーⓇ
■ 寸法図
CAD図面がホームページよりダウンロード出来ます。
www.iai-robot.co.jp
(注) 標準は開側が原点となります。原点を閉側にする場合はオプション(型式:NM)をご指定ください。 S.E.:ストロークエンド
φ3 H7リーマー深さ4
4-M4深さ6
28
3+ 0 .0 1 0 0 深さ4
R)
(
R 5
( )
P
詳細図 P 詳細図 Q
82 (1.3) 68.5
電源I/O
71 コネクター (34.5) 34
25.4 ステータスLED 16 1.5 2-M4深さ8 36
ティーチングポート 4 取付面A φ3 H7リーマー深さ4基準面 24
Q
2-4.5キリ
8深座ぐり深さ4.5
φ5
グリース給油口 取付面B
フィンガー開閉用ねじ
フィンガー開閉用ねじ M3深さ5
(アース接続用)
25 2-M3深さ5
36 7(サービスタップ)
開側(原点) : 23 50
閉側(S.E.) : 3 22.5
部 6)
ケーブルコネクター クタ
ー R8 φ4 H7リーマー深さ4
ネ 径コ 半 2-M4深さ6( 渉 部干 ラー
ロー R61
)
ント 径
(コ 半
干渉
ィンガー
部
(フ 径R44
)
干渉半
(2)
6.5 6.5
S 11.25
22.5 詳細図 S
フィンガー部詳細
無線通信仕様(-WL)
無線軸動作対応仕様(-WL2) (コネクター部干渉半径R86)
(コントローラー部
28.6 22.8 干渉半径R78)
24.3
T 矢視 T
■ 質量
項目 内容
質量 0.51kg
■ 適応コントローラー
(注) ECシリーズはコントローラー内蔵です。内蔵コントローラーの詳細は、 22 ページをご確認ください。
9 EC-GRB8
16.3
15.7
17 25
46.8
59 21 5.5
70
82
84
58.5
41.8 1
1
4
17.5
15 0-0.1
5
24.5 31.3
3 + 00 .0 1 0 深さ4
(6.8) 40
Page11
お問合せは
0800-888-0088 EC エレシリンダーⓇ
EC-GRB8 10
Page12
EC-GRB10
EC エレシリンダーⓇ
EC-GRB10 本体幅スライド 2ツ爪 100 24Vパルスmm モーター
■ 型式項目
EC - G RB10 M - 30 - -
シリーズ - タイプ 減速比 - ストローク - 電源・I/Oケーブル長 - オプション
台形ねじ 30 30mm 下記電源・I/Oケーブル長 下記オプション
M リード1.5mm (片側15mm) 価格表参照 価格表参照
プーリー減速比1.15
水 平 垂 横立て
直 天吊り
■ ストローク別価格表(標準価格) (1)「メインスペック」の開閉最高速度は片側の動作速度を表します。相対
ストローク(mm) 標準価格 動作速度は 2 倍の値となります。
30 - (2)「メインスペック」の最大把持力は、把持点距離 0、オーバーハング距
離0の場合の両フィンガー把持力の合計値です。実際に搬送出来るワー
■ オプション価格表(標準価格) 選定上の ク質量は、「把持点距離の確認」をご参照ください。注意 (3)ワークを把持する際は必ず押付け動作をご使用ください。
名称 オプション記号 参照頁 標準価格 (4)セルフロックにより、電源遮断時においてもワーク把持力を維持します。
RCON-EC接続仕様(注1) ACR 19 - 電源遮断時に把持中のワークを除去する際は、側面の開閉ねじを回す
ケーブル固定金具(前側) FST 19 - か、フィンガーアタッチメントを取外してワークを除去してください。
原点逆仕様 NM 19 -
PNP仕様 PN 1 9 -
電源2系統仕様 TMD2 2 0 -
ケーブル固定金具(上側)(注2) TST 2 0 -
バッテリーレス
アブソリュートエンコーダー仕様 WA 2 0 -
無線通信仕様 WL 20 -
無線軸動作対応仕様 WL2 2 0 -
(注1) RCON-EC接続仕様(ACR)選択時は、PNP仕様(PN)および電源2系統仕様(TMD2)を選択で
きません。
(注2) 4方向コネクターケーブル選択時のみ選択できます。
■ 電源・I/Oケーブル長価格表(標準価格)
■ 標準コネクターケーブル
ユーザー配線仕様 RCON-EC接続仕様(注4)
ケーブル記号 ケーブル長 ( バラ線) (両端コネクター付き)
CB-EC-PWBIO□□□-RB付属 CB-REC-PWBIO□□□-RB付属
0 ケーブルなし - (注3) -
1 ~ 3 1 ~ 3m - -
4 ~ 5 4~ 5m - -
6 ~ 7 6 ~ 7m - -
8 ~ 10 8 ~ 10m - -
(注3) 端子台コネクターのみ付属します。詳細は 23ペ ージをご確認ください。
(注4) オプションでRCON-EC接続仕様(ACR)を選択した場合です。
(注) ロボットケーブルです。
■ 4方向コネクターケーブル
ユーザー配線仕様 RCON-EC接続仕様(注5)
ケーブル記号 ケーブル長 ( バラ線) (両端コネクター付き)
CB-EC2-PWBIO□□□-RB付属 CB-REC2-PWBIO□□□-RB付属
S1 ~S3 1 ~ 3m - -
S 4 ~ S5 4~ 5m - -
S6 ~ S7 6 ~ 7m - -
S8 ~ S10 8 ~ 10m - -
(注5) オプションでRCON-EC接続仕様(ACR)を選択した場合です。
(注) ロボットケーブルです。
11 EC-GRB10
Page13
お問合せは
0800-888-0088 EC エレシリンダーⓇ
■ メインスペック
項目 内容 項目 内容
リード 台形ねじリード(mm) 1.5 駆動方式 台形ねじ φ8プーリー減速比 1.15 繰返し位置決め精度 ±0.05 mm
把持動作 最大把持力(N)(両側) 100 ロストモーション -(2点間位置決め機能のため、表記できません。)把持動作時の最高速度(mm/s()片側) 5 バックラッシ(片側) 0.2mm以下
最高速度(mm/s()片側) 95 リニアガイド 有限ガイド
アプローチ動作 最低速度(mm/s)(片側) 5 Ma : 3.60 N・m定格加減速度(G)(片側) 0.3 静的許容モーメント Mb : 3.60 N・m
最高加減速度(G)(片側) 0.3 Mc : 10.2 N・m
ブレーキ ブレーキ仕様 - 垂直方向許容荷重(注6) 598Nブレーキ保持力(kgf) - 使用周囲温度・湿度 0~40℃、85%RH以下(結露なきこと)
ストローク(片側) 最小ストローク(mm)(片側) 15 保護等級 -最大ストローク(mm)(片側) 15 耐振動・耐衝撃 4.9m/s2
海外対応規格 CEマーク、RoHS指令
モーター種類 パルスモーター(□28)
エンコーダー種類 インクリメンタル(標準)/バッテリーレスアブソリュート(オプション)
エンコーダーパルス数 800 pulse/rev
納期 ホームページ[納期照会]に記載
(注6) 上記値を超える負荷で使用した場合、寿命低下、破損の原因となります。
■ スライドタイプモーメント方向
Ma
Mb Mc
■ 把持点距離の確認
フィンガー(爪)取付け面から把持ポイントまでの距離(L、H)をグラフの範囲内となるようにご使用ください。
GRB10M
160
オ140
ー 把持電流20~30%
バ120
ー100
ハ
ン80 把持電流40%
グ60 把持電流50%
L 量H 40 把持電流60%
(mm)20
把持ポイント H 0 把持電流70%
0 20 40 60 80 100 120 140 160
把持点 L(mm)
(注) 制限範囲を超えた場合はフィンガー摺動部および内部メカ
に過大なモーメントが作用して、寿命に悪影響を及ぼす原
因となります。
■ 把持力
■把持力と電流制限値の相関図 ■把持点距離と把持力の目安
GRB10M ■ 推奨領域 GRB10M
120 100
90
100 80
80 70
把 把60
持
力60
持
力50
(N) 40
40 (%)30
20 20
10
0 0
0 10 20 30 40 50 60 70 80 0 20 40 60 80 100 120 140 160
電流制限値(%) 把持点距離LまたはH(mm)
(注) 把持点距離(L、H)を0とした場合の、両フィンガーの合計 (注) 最大把持力を100%とした時の張出し位置による把持力を
値です。 示しています。使用するフィンガーアタッチメントの剛性
(注) 目安の数字です。0~60%程度のばらつきがあります。特 により結果が異なる可能性があります。
に推奨領域(グラフ着色域)外の電流制限値を設定した場
合、ばらつきの可能性が高くなります。
(注) 把持(押付け)を行う場合は、速度が5mm/s固定となりま
す。
EC-GRB10 12
Page14
EC エレシリンダーⓇ
■ 寸法図
CAD図面がホームページよりダウンロード出来ます。
www.iai-robot.co.jp
※1 異物侵入防止のため、セットスクリューで埋栓されています。取付面Aを使用する場合は取外してください。 S.E.:ストロークエンド
(注) 標準は開側が原点となります。原点を閉側にする場合はオプション(型式:NM)をご指定ください。
φ4 H7リーマー深さ4
40 4-M6深さ9※1 4
+ 0.012 0 深さ4
5
(R
)
P 詳細図 P
詳細図 Q
(1.3) 69.5
98 電源I/O (30.5) 39
87 コネクター 37
ティーチングポート 25.5 ステータスLED 18 1.5 50
1.4 取付面A 基準面 25 2-M8深さ12
2-6.6キリ 取付面B
11深座ぐり深さ6.5 φ5
グリース給油口 M3深さ6 フィンガー開閉用ねじ 1
ステータスLED (アース接続用) φ4 H7リーマー深さ4フィンガー開閉用ねじ Q
開側(原点) : 33 50 2-M3深さ6
閉側(S.E.) : 3 25 5 (サービスタップ)
(
干 コ
渉 ネク φ4 H7リーマー深さ4
半 タ
( ー ケーブルコネクター 2-M4深さ7.5コ 径R 部
干 ン 8渉 ト半 ロー
4
径 ラ
)
R ー61 部)
(フィ
干 ン渉 ガ半 ー部径R52)
S
5 13 2
16.5 詳細図 S
25 フィンガー部詳細
■ 質量
項目 内容
質量 0.69kg
■ 適応コントローラー
(注) ECシリーズはコントローラー内蔵です。内蔵コントローラーの詳細は、 22ペ ージをご確認ください。
13 EC-GRB10
20.9
20.2
53
24 6
66.4
80
90
92
66.5
53.5 5
1
5
19.5
15 0-0.1
4 + 0 .0 12 0 深さ4
5
26 40
53
R)
(
Page15
お問合せは
0800-888-0088 EC エレシリンダーⓇ
EC-GRB10 14
Page16
EC-GRB13
EC エレシリンダーⓇ
EC-GRB13 本体幅スライド 2ツ爪 130 24Vパルスmm モーター
■ 型式項目
E C - GRB13 - 4 0 - -
シリーズ - タイプ 減速比 - ストローク - 電源・I/Oケーブル長 - オプション
台形ねじ 40 40mm 下記電源・I/Oケーブル長 下記オプション
M 標準 リード2mm (片側20mm) 価格表参照 価格表参照
プーリー減速比1.25
台形ねじ
L 高推力 リード2mm
プーリー減速比2.50
水 平 垂 横立て
直 天吊り
■ ストローク別価格表(標準価格) (1)「メインスペック」の開閉最高速度は片側の動作速度を表します。相対
ストローク(mm) 標準価格 動作速度は 2 倍の値となります。
40 - (2)「メインスペック」の最大把持力は、把持点距離 0、オーバーハング距
離0の場合の両フィンガー把持力の合計値です。実際に搬送出来るワー
■ オプション価格表(標準価格) 選定上の ク質量は、「把持点距離の確認」をご参照ください。注意 (3)ワークを把持する際は必ず押付け動作をご使用ください。
名称 オプション記号 参照頁 標準価格 (4)セルフロックにより、電源遮断時においてもワーク把持力を維持します。
RCON-EC接続仕様(注1) ACR 1 9 - 電源遮断時に把持中のワークを除去する際は、側面の開閉ねじを回す
ケーブル固定金具(前側) FST 1 9 - か、フィンガーアタッチメントを取外してワークを除去してください。
原点逆仕様 NM 19 -
PNP仕様 PN 19 -
電源2系統仕様 TMD2 2 0 -
ケーブル固定金具(上側)(注2) TST 20 -
バッテリーレス
アブソリュートエンコーダー仕様 WA 2 0 -
無線通信仕様 WL 2 0 -
無線軸動作対応仕様 WL2 20 -
(注1) RCON-EC接続仕様(ACR)選択時は、PNP仕様(PN)および電源2系統仕様(TMD2)を選択で
きません。
(注2) 4方向コネクターケーブル選択時のみ選択できます。
■ 電源・I/Oケーブル長価格表(標準価格)
■ 標準コネクターケーブル
ユーザー配線仕様 RCON-EC接続仕様(注4)
ケーブル記号 ケーブル長 ( バラ線) (両端コネクター付き)
CB-EC-PWBIO□□□-RB付属 CB-REC-PWBIO□□□-RB付属
0 ケーブルなし -(注3) -
1 ~ 3 1 ~ 3m - -
4 ~ 5 4~ 5m - -
6 ~ 7 6 ~ 7m - -
8 ~ 10 8 ~ 10m - -
(注3) 端子台コネクターのみ付属します。詳細は 23 ページをご確認ください。
(注4) オプションでRCON-EC接続仕様(ACR)を選択した場合です。
(注) ロボットケーブルです。
■ 4方向コネクターケーブル
ユーザー配線仕様 RCON-EC接続仕様(注5)
ケーブル記号 ケーブル長 ( バラ線) (両端コネクター付き)
CB-EC2-PWBIO□□□-RB付属 CB-REC2-PWBIO□□□-RB付属
S1 ~S3 1 ~ 3m - -
S 4 ~ S5 4~ 5m - -
S 6 ~ S7 6 ~ 7m - -
S 8 ~ S10 8 ~ 10m - -
(注5) オプションでRCON-EC接続仕様(ACR)を選択した場合です。
(注) ロボットケーブルです。
15 EC-GRB13
Page17
お問合せは
0800-888-0088 EC エレシリンダーⓇ
■ メインスペック
項目 内容 項目 内容
減速比 M L 駆動方式 台形ねじ φ10
リード 台形ねじリード(mm) 2 2 繰返し位置決め精度 ±0.05 mmプーリー減速比 1.25 2.50 ロストモーション -(2点間位置決め機能のため、表記できません。)
把持動作 最大把持力(N)(両側) 150 360 バックラッシ(片側) 0.2mm以下把持動作時の最高速度(mm/s()片側) 5 5 リニアガイド 有限ガイド
最高速度(mm/s)(片側) 120 60 Ma : 7.52 N・m
アプローチ動作 最低速度(mm/s()片側) 5 5 静的許容モーメント Mb : 7.52 N・m定格加減速度(G()片側) 0.3 0.3 Mc : 15.3 N・m
最高加減速度(G)(片側) 0.3 0.3 垂直方向許容荷重(注6) 898N
ブレーキ ブレーキ仕様 - - 使用周囲温度・湿度 0~40℃、85%RH以下(結露なきこと)ブレーキ保持力(kgf) - - 保護等級 -
ストローク(片側) 最小ストローク(mm)(片側) 20 20 耐振動・耐衝撃 4.9m/s
2
最大ストローク(mm()片側) 20 20 海外対応規格 CEマーク、RoHS指令
モーター種類 パルスモーター(□28)
エンコーダー種類 インクリメンタル(標準)/バッテリーレスアブソリュート(オプション)
エンコーダーパルス数 800 pulse/rev
納期 ホームページ[納期照会]に記載
(注6) 上記値を超える負荷で使用した場合、寿命低下、破損の原因となります。
■ スライドタイプモーメント方向
Ma
Mb Mc
■ 把持点距離の確認
フィンガー(爪)取付け面から把持ポイントまでの距離(L、H)をグラフの範囲内となるようにご使用ください。
GRB13M GRB13L
160 160
オ140 オ140 把持電流20%
ー120 ー120 把持電流30%バ バ
ー100 把持電流20~40% ー100 把持電流40%
ハ ハ 把持電流70%
ン80 ン80
グ60 把持電流50% グ 把持電流50%
L 量
60
H 40 把持電流60%
量
H 40 把持電流60%
(mm) 把持電流70%20 (mm)20
把持ポイント H 0 0
0 20 40 60 80 100 120 140 160 0 20 40 60 80 100 120 140 160
把持点 L(mm) 把持点 L(mm)
(注) 制限範囲を超えた場合はフィンガー摺動部および内部メカに過大なモーメントが作用して、寿命に悪影響を及ぼす原因となり
ます。
■ 把持力
■把持力と電流制限値の相関図 ■把持点距離と把持力の目安
GRB13M ■ 推奨領域 GRB13L ■ 推奨領域 GRB13M/13L
160 400 100
140 350 90
120 300
80
70
把100 把250 把60
持
力80
持
力200
持
力50
(N)60 (N)150 (%)40
40 100
30
20
20 50 10
0 0 0
0 10 20 30 40 50 60 70 80 0 10 20 30 40 50 60 70 80 0 20 40 60 80 100 120 140 160
電流制限値(%) 電流制限値(%) 把持点距離LまたはH(mm)
(注) 把持点距離(L、H)を0とした場合の、両フィンガーの合計値です。 (注) 最大把持力を100%とした時の張出し位置による把持力を
(注) 目安の数字です。0~60%程度のばらつきがあります。特に推奨領域(グラフ着色域)外の電流制限値を設定した場合、ばらつき 示しています。使用するフィンガーアタッチメントの剛性
の可能性が高くなります。 により結果が異なる可能性があります。
(注) 把持(押付け)を行う場合は、速度が5mm/s固定となります。
EC-GRB13 16
Page18
EC エレシリンダーⓇ
■ 寸法図
CAD図面がホームページよりダウンロード出来ます。
www.iai-robot.co.jp
※1 異物侵入防止のため、セットスクリューで埋栓されています。取付面Aを使用する場合は取外してください。 S.E.:ストロークエンド
(注) 標準は開側が原点となります。原点を閉側にする場合はオプション(型式:NM)をご指定ください。
φ4 H7リーマー深さ4
40 4-M6深さ9※1
4 +0.0 0 1 2 深さ4 5
R)
(
P 詳細図 P 詳細図 Q
130 (1.3) 69.5
119 電源I/O (30.5) 39
87 コネクター 37
ティーチングポート 25.5 ステータスLED 18 1.5 50
1.4 取付面A 基準面 25 2-M8深さ12
2-6.6キリ
φ5 取付面B11深座ぐり深さ6.5
フィンガー開閉用ねじ
グリース給油口
5 M3深さ6
1
フィンガー開閉用ねじ ステータスLED (アース接続用) φ4 H7リーマー深さ4 Q
開側(原点) : 43 50 2-M3深さ6
閉側(S.E.) : 3 36 (サービスタップ)
φ4 H7リーマー深さ4
( ケーブルコネクターコネ 2-M5深さ7.5干渉 ク半 タ径 ーR 部84
(フ )ィ
干 ン渉 ガ半 ー部径R67) S
10.5 14.5 2
20 詳細図 S
36 フィンガー部詳細
■ 質量
項目 内容
質量 0.99kg
■ 適応コントローラー
(注) ECシリーズはコントローラー内蔵です。内蔵コントローラーの詳細は、2 2ペ ージをご確認ください。
17 EC-GRB13
20.9
20.2
53 24 6
66.4
80
90
92
66.5
53.5 5
1
5
19.5
15 0-0.1
4 + 0.01 0 2 深さ4
5
26 40
53
R)
(
Page19
お問合せは
0800-888-0088 EC エレシリンダーⓇ
EC-GRB13 18
Page20
オプション
EC エレシリンダーⓇ
エレシリンダーシリーズ オプション
RCON-EC接続仕様 ※TMD2およびPNオプションとは同時選択できません(ACRオプションは電源2系統仕様を含む)
型 式 ACR 対象機種 全機種
説 明 R-unit経由でフィールドネットワーク接続するときに選択するオプションです。
※当オプション選択で電源が2系統になり、入出力仕様がNPNに固定されるため、TMD2、PNオプションとの同時選択はできません。
ケーブル固定金具(前側)
型 式 F ST 対象機種 全機種
EC-GRB8 EC-GRB10
説 明 コネクター近くのケーブルを結束バンドで固定するための金具です。 EC-GRB13
固定金具を取付けた状態でもティーチングポートへのアクセスが可能です。
(ただし、ケーブル取出し方向がティーチングポート側の場合、干渉するためティーチング
ポートへアクセスできません)
※組付け出荷ではありませんので、図面を参考に取付けてください。
取付面Aでグリッパーを固定する場合は、ケーブル固定金具と共締めしてください。
EC-GRB8 単品型式 EC-FST-GRB8 EC-GRB10 / GRB13 単品型式 EC-FST-GRB1013
(単品質量:0.1kg/ 材質:ステンレス鋼) (単品質量:0.11kg/ 材質:ステンレス鋼)
19
)
) R1
(57°)
18
R1 (57°)
(
(
(57°)
(68.5) 矢視 S
(71) (57°) 矢視 S
取付面A 114 取付面A 114
ティーチングポート
ティーチングポート
S
S
◆固定金具以外の付属品 ◆固定金具以外の付属品
・フランジヘッド六角穴付きボルト (ステンレス ):M4 × 6( 4個) ・フランジヘッド六角穴付きボルト (ステンレス ):M6 × 10( 4個)
・結束バンド(1本) ・結束バンド(1本)
原点逆仕様
型 式 NM 対象機種 全機種
説 明 通常原点位置は、フィンガーが開く側に設定されていますが、装置のレイアウトなどによって逆側にしたい場合は、オプションで原点方向を
逆側に設定することができます。(原点位置は工場出荷時に調整して出荷されているため、納品後に原点を変更したい場合は、当社に返却
していただき調整が必要になります。)
PNP仕様 ※ACRオプションはNPN仕様のため、同時選択できません。
型 式 PN 対象機種 全機種
説 明 ECシリーズでは、外部機器を接続するための入出力仕様が標準で、NPN仕様です。
このオプションを指定することで、入出力仕様をPNP仕様にできます。
19 オプション
1.5
12 (4)
(15.7)
70
1.5
16.5 (1.4)
(20)
75