




●最大50kg可搬
●アーム長1200mmの超大型スカラロボット
●標準サイクルタイム0.61秒
このカタログについて
| ドキュメント名 | スカラロボットIXA高可搬タイプ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 5Mb |
| 登録カテゴリ | |
| 取り扱い企業 | メーカー:株式会社アイエイアイ、 販売:株式会社羽根田商会 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
スカラロボット IXA-4NHN
代理店
Page2
特長
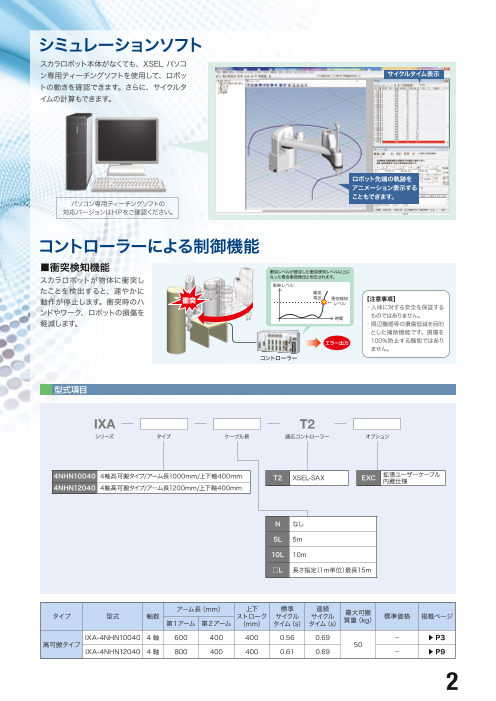
最 大 50㎏可搬 シミュレーションソフトスカラロボット本体がなくても、XSEL パソコ
アーム長 1,200mm ン専用ティーチングソフトを使用して、ロボッ サイクルタイム表示トの動きを確認できます。さらに、サイクルタ
イムの計算もできます。
超大型スカラロボット
ロボット先端の軌跡を
アニメーション表示する
こともできます。
パソコン専用ティーチングソフトの
対応バージョンはHPをご確認ください。
コントローラーによる制御機能
■衝突検知機能 衝突レベルが設定した衝突検知レベル以上に
m スカラロボットが物体に衝突し なった場合衝突検出と判定されます。
長 1,20
0m 衝突レベルたことを検出すると、速やかに 衝突
アーム 動作が停止します。衝突時のハ 衝突
検出 衝突検知 【注意事項】
レベル
・ 人体に対する安全を保証する
ンドやワーク、ロボットの損傷を
時間 ものではありません。
軽減します。 ・ 周辺機器等の損傷低減を目的
とした補助機能です。損傷を
エラー出力 100%防止する機能ではあり
ません。
コントローラー
最大可搬
50㎏ 稼動範囲広範囲に稼働できるため、大型のワーク搬送にも最適です。
標準サイクルタイム
(IXA-4NHN12040)
2,400mm
0.61秒
▶2kg搬送 水平移動
動作
条件 ▶水平移動300mm/
上下
移動
上下移動25mm
(IXA-4NHN12040)
1
Page3
型式項目
最 大 50㎏可搬 シミュレーションソフトスカラロボット本体がなくても、XSEL パソコ
アーム長 1,200mm ン専用ティーチングソフトを使用して、ロボッ サイクルタイム表示トの動きを確認できます。さらに、サイクルタ
イムの計算もできます。
超大型スカラロボット
ロボット先端の軌跡を
アニメーション表示する
こともできます。
パソコン専用ティーチングソフトの
対応バージョンはHPをご確認ください。
コントローラーによる制御機能
■衝突検知機能 衝突レベルが設定した衝突検知レベル以上に
m スカラロボットが物体に衝突し なった場合衝突検出と判定されます。衝突レベル
長 ,20
0m1 たことを検出すると、速やかに 衝突
ーム 動作が停止します。衝突時のハ 衝突
検出 衝突検知 【注意事項】
ア レベル ・ 人体に対する安全を保証するンドやワーク、ロボットの損傷を
時間 ものではありません。
軽減します。 ・ 周辺機器等の損傷低減を目的
とした補助機能です。損傷を
エラー出力 100%防止する機能ではあり
ません。
コントローラー
型式項目
最大可搬 IXA T2シリーズ タイプ ケーブル長 適応コントローラー オプション
50㎏ 稼動範囲広範囲に稼働できるため、大型のワーク搬送にも最適です。 4NHN10040 4軸高可搬タイプ/アーム長1000mm/上下軸400mm T2 XSEL-SAX EXC 拡張ユーザーケーブル内蔵仕様
4NHN12040 4軸高可搬タイプ/アーム長1200mm/上下軸400mm
N なし
5L 5m
標準サイクルタイム 10L 10m
(IXA-4NHN12040) □L 長さ指定(1m単位)最長15m
2,400mm
0.61秒 アーム長(mm) 上下 標準 連続タイプ 型式 軸数 ストローク サイクル サイクル 最大可搬
第1アーム 第2アーム (mm) タイム(s) タイム(s) 質量(kg)
標準価格 掲載ページ
▶2kg搬送 水平移動
動作 IXA-4NHN10040 4 軸 600 400 400 0.56 0.69 ー ▶ P3▶水平移動300mm/ 上下 高可搬タイプ 50条件 移動 ー
上下移動25mm IXA-4NHN12040 4 軸 800 400 400 0.61 0.69 ▶ P9
(IXA-4NHN12040)
2
Page4
製品仕様・図面、IXA-4NHN10040
IXA スカラロボット
IXA-4NHN10040 バッテリー アーム長レスアブソ 1000mm
■ 型式項目
I XA - 4 N HN 1 00 40 - - T2 -
シリーズ - 軸数 タイプ アーム長 上下軸ストローク - ケーブル長 - 適応コントローラー - オプション
4 4軸 NHN 高可搬タイプ 100 1000mm 40 400mm N なし T2 XSEL-SAX 下記オプション
5L 5m 価格表参照
10L 10m
□L 長さ指定
(1m単位)
水 平 垂 横立て
直 天吊り
■ 価格表(標準価格) (1)(注 1)~(注 8)は、1 5 ページをご参照ください。
型式 標準価格 (2)加減速度は、搬送する物の質量および移動距離、場所により最大設定
IXA-4NHN10040 - 値が変化します。また、最大設定値での連続動作を行うと過負荷エラー
が出る場合があります。連続動作を行う際は加減速値を下げるか、
■ オプション価格表(標準価格) デューティー比(目安)を参考にして加減速後に停止時間を設けてく選定上の ださい。
名称 型式 参照頁 標準価格 注意 (3)モーター交換を行った時などは、アブソリュートリセットを行う必要
拡張ユーザーケーブル内蔵仕様 EXC 16 - があります。回転軸 (4 軸目 ) のアブソリュートリセットには、調整ジ
グが必要となります。詳細は 17 ページをご参照ください。
■ 別売オプション価格表(標準価格) (4)スカラロボットは 100%の速度・加速度で連続運転は出来ません。
動作可能条件は「加減速度設定の目安」ページをご確認ください。
名称 型式 参照頁 標準価格
ユーザーケーブル CB-IXA-USR□□□-CS 1 7 -
フランジ IXA-FL-1 17 -
外部配線保護フランジ ※1 IXA-PFL-EW-1 17 -
R軸配線保護フランジ IXA-PFL-RW-1 17 -
Z軸配線側面ステー Z軸400st IXA-SST-ZW-2 18 -
Z軸配線上面ステー Z軸400st IXA-TST-ZW-2 18 -
ソレノイドバルブセット ※1 IXA-SVP-1 18 -
※1 外部配線保護フランジとソレノイドバルブセットの同時取付けはできません。
(注) 別途ご注文ください。
■ ケーブル長価格表(標準価格)
種類 ケーブル記号 4軸仕様
標準タイプ 5L (5m) - 10L( 10m) -
1L (1m) ~ 4L (4m) -
6L (6m) ~ 9L (9m) -
11L (11m) -
長さ指定 12L (12m) -
13L (13m) -
1 4L( 14m) -
15L (15m) -
(注) 下記ケーブルの合計金額となります。
[4軸仕様]モーターケーブル:4本 ・エンコーダーケーブル:4本 ・ブレーキケーブル:1本
3 IXA-4NHN10040
Page5
お問合せは
0800-888-0088 IXA スカラロボット
■ メインスペック
項目 内容4軸仕様 項目
内容
4軸仕様
最大可搬質量(kg()注1) 50 水平面内 ±0.04mm
合成最高速度(mm/s) 7540 位置繰返し精度 上下軸 ±0.02mm
速度 第1アーム(度/s) 280
(注4) 回転軸 ±0.01度
(注2) 各軸最高速度 第2アーム(度/s) 380 ユーザー配線 10心(9心+シールド) AWG24(定格30V/MAX1A)上下軸(mm/s) 1200 ユーザー配管 外径φ6 内径φ4 エアチューブ3本回転軸(度/s) 920 (最高使用圧力0.6MPa)
押付け(N)(注3) 上限 570 アラーム表示灯(注5) アンバー色LED 小型表示灯1個 DC24V供給必要下限 70 ブレーキ解除スイッチ(注6) 上下軸落下防止用ブレーキ解除スイッチ
アーム長(mm) 1000 先端軸 許容トルク 15N・m
各軸アーム長(mm) 第1アーム 600 許容負荷モーメント 48N・m第2アーム 400 使用周囲温度・湿度 0~40℃、20~85%RH以下(結露なきこと)
第1アーム(度) ±137 保護等級 IP10
各軸動作範囲 第2アーム(度) ±142 耐振動・耐衝撃 衝撃・振動が加わらないこと上下軸(mm) 400 騒音(注7) 85dB未満
回転軸(度) ±360 海外対応規格 CEマーク、RoHS指令
モーター種類 ACサーボモーター
第1アーム 1,000W
モーター容量 第2アーム 750W上下軸 600W
回転軸 200W
エンコーダー種類 バッテリーレスアブソリュート
エンコーダーパルス数 131,072 pulse/rev
納期 ホームページ[納期照会]に記載
■ サイクルタイム ■ 先端軸許容負荷慣性モーメント
標準/連続サイクルタイムは下記の条件で、最速となる往復の動作設定にて動作をした 第4軸許容慣性モーメントは、スカラロボットの第4軸(回転軸)の回転中心換算の慣性
場合の所要時間を表します。 モーメント許容値です。第4軸回転中心からツール重心までのオフセット量は、以下の
2kg 搬送、上下移動25mm、水平移動300mm(粗位置決めアーチモーション) 数値以内としてください。ツール重心位置が第4軸中心位置を離れた場合は、速度・加
【標準サイクルタイム】 速度を適宜落とす必要があります。負荷や動作条件によって張出し長は制限されます。
最速動作の場合の所要時間です。一般に高速性能の目安となります。 軸数 先端軸許容負荷慣性モーメント
最速動作での連続動作はできませんのでご注意ください。 4軸仕様 0.5 kg・m2
【連続サイクルタイム】
連続動作を行う場合のサイクルタイムとなります。
項目 時間
標準サイクルタイム 0.56秒
連続サイクルタイム 0.69秒
水平移動
上下移動
負荷
重心
水平方向
水平方向 上下方向
200mm以下 150mm以下
IXA-4NHN10040 4
上下方向
Page6
IXA スカラロボット
■ 加減速度設定の目安
スカラロボットIXAは、カタログの最大加減速度、最大速度での連続運転は出来ません。最大加減速度で動作する場合は、連続運転デューティー比の目安グラフを参考に停止時間
を設けてください。連続で動作が必要な場合は、加減速度設定の目安グラフの、連続運転目安範囲の加減速度設定で動作させてください。
(1) PTP動作の場合は必ずプログラム上にてWGHT命令を使って、質量、慣性モーメントを設定し動作させてください。スカラは各可搬質量で動作することの出来る最大加減速度を100%としています。
同じ加減速度、速度設定でも搬送質量が異なると、動作時間も異なりますのでご注意ください。PTP動作の加速度、減速度で設定した値(%)は、最適速度・最適加減速度機能により、速度および加減
速度は搬送負荷質量、移動姿勢によって、設定した値が運転可能な値に調整されます。ただし、最適加減速度機能は、あらゆる動作パターンで動作可能であることを保証するものではありません。
(2) 加減速度は連続運転目安値より徐々に設定値を上げて調整するようにしてください。
(3) 過負荷エラーが出る場合は加減速度を適宜下げるか、連続運転デューティー比の目安を参考に停止時間を設ける調整を行ってください。
(4) デューティー比(%)=(運転時間/(運転時間+停止時間))×100
(5) ロボットを高速で水平移動させたい場合は出来るだけ上下軸を上昇端付近で動作させてください。
(6) 慣性モーメント、搬送質量は許容値以下としてください。
(7) 可搬質量は第4軸回転中心の慣性モーメント、質量を示します。
(8) 質量、慣性モーメントに応じた適切な加減速度を守ってロボットを運転してください。守らなかった場合は、駆動部の早期寿命や破損、振動を招きます。
(9) 負荷の慣性モーメントが大きい場合、上下軸の位置によっては、上下軸に振動が発生する場合があります。振動が発生した場合は適宜加減速度を落として使用してください。
■ PTP動作
NHN100_PTP加減速度設定の目安 NHN100_PTP動作デューティー比設定の目安
100% 100%
16kg,33kg,50kg
90% 最大設定範囲 90%
80% 80%
70% 70% 8kg
60% 60%
連続運転目安範囲
50% 50%
40% 40%
30% 30%
20% 20%
10%
10%
0%
0 5 8 10 1516 20 25 30 35 40 45 50 0%
100% 80%75% 60% 50% 40% 20% 0%
搬送負荷質量(kg) デューティー比(%)
0 負荷慣性モーメント(kg・m2) 0.5
■ CP動作
水平 上下
NHN100_CP加減速度設定の目安 NHN100_CP加減速度設定の目安
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作
1.2G 1.2G
1.0G 1.0G
最大設定範囲
0.8G 最大設定範囲 0.8G 連続運転目安範囲
連続運転目安範囲 最大速度1200mm/s
0.6G 最大速度1200mm/s 0.6G
0.5G
0.4G 0.4G
0.2G 0.2G
0.05G
0.0G 0.0G
0 5 10 15 20 25 30 35 40 45 50 0 5 8 10 1516 20 25 30 3335 40 45 50
搬送負荷質量(kg) 搬送負荷質量(kg)
0 負荷慣性モーメント(kg・m2) 0.5
NHN100_CP動作デューティー比設定の目安 NHN100_CP動作デューティー比設定の目安
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作
1.2G 1.2G
8kg,16kg,33kg,50kg 8kg
1.0G 1.0G
0.8G 0.8G
0.6G 0.6G
16kg
0.5G
0.4G 0.4G
33kg
0.2G 0.2G
50kg
0.05G
0.0G 0.0G
100% 80% 60% 40% 20% 0% 100% 80% 60% 40% 20% 0%
デューティー比(%) デューティー比(%)
5 IXA-4NHN10040
加減速度(G) 加減速度(G) 加減速度(%)
加減速度(G) 加減速度(G) 加減速度(%)
Page7
お問合せは
0800-888-0088 IXA スカラロボット
■ CP動作 速度・加減速度制限
水平 上下
NHN100_上下軸(Z軸)動作なし水平移動動作 NHN100_上下軸(Z軸)のみの動作
1400 1400
1.0G 0.5G
1200 1200
1000 1000 1.0G 0.2G
1.0G 1.0G
860
800 800
600 600
430
400 400
0.05G
200
200
0
0
0 5 10 15 20 25 30 35 40 45 50 0 5 810 1516 20 25 30 3335 40 45 50
搬送負荷質量(kg) 搬送負荷質量(kg)
IXA-4NHN10040 6
CP速度(mm/s)
CP速度(mm/s)
Page8
IXA スカラロボット
■ 寸法図
CAD図面がホームページよりダウンロード出来ます。
www.iai-robot.co.jp
■ IXA-4NHN10040 ST:ストロークM.E.:メカニカルエンド
(注) ケーブル接続に関しては1 5 ページ(注8)を参照ください。 S.E.:ストロークエンド
R
グロメット 1
117 2-M5深さ10
3
(拡張ユーザーケーブルオプション(型式:EXC)設定時 .
35.5 81.5 M4深さ8(アース接続用)
5
45 50 50 ケーブル取出し用) 基準面
19.5
19.5 40.5 C W Y Y
詳細図 K
黒
白 ベース取付け穴詳細
φ13
赤
6-M5深さ10 ブレーキ解除スイッチ
詳細図 C LED表示灯6-M5深さ10 (アンバー色) 130 50 K
ユーザーねじ穴詳細 20 2203-φ6エアチューブ 415
ユーザー配線用D-subコネクター 詳細図 W ワンタッチ継手 (1388) 断面図 Y-Y
(9極、ソケット、固定具M2.6) ユーザーパネル詳細 70 1000 (318) (4箇所)
配線:24AWG、10心(9心+シールド) 400 600
4-M5深さ8
(反対側も同様)
M.E.
原点 P 80
26
断面図 Z-Z (100) X
基準面 130 285 配線空間
着座面 (33)
S.E.
グロメット
4 N9 M.E. (拡張ユーザーケーブルオプション(型式:EXC)設定時コネクター取付け穴)
Z Q ユーザー配線用D-subコネクター(15極、プラグ、固定具M2.6)
4-M5深さ10 配線:24AWG、
Z (R 114.1 10心(9心+シールド)) 35.5 60
N
3-φ6エアチューブ
詳細図 P 225 30 ワンタッチ継手
10+0.015深さ10 2-M5深さ100 40 φ10 H7リーマー深さ10 黒
(ベース着座面より) 詳細図 N 白赤
(R
) ユーザーねじ穴詳細 モーター・エンコーダー
ケーブル接続
(1軸目)
詳細図 Q モーター・エンコーダー
ベース長穴詳細 ケーブル接続(2軸目~4軸目)
ブレーキケーブル接続
詳細図 X
背面パネル詳細
R1 000 0
0
0 R1
(273) (273)
600R R600
R400 R40
0
(75) (75)
160 160
81.5° 81.5°
左腕系 動作範囲 右腕系 動作範囲
■ 質量
項目 内容
質量 80.0kg
■ 適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
名称 外観 最大接続
制御方法
可能軸数 電源電圧 ポジショナー パルス列 プログラム ネットワーク ※選択 最大位置決め点数 標準価格 参照ページDV CC CIE PR CN ML ML3 EC EP PRT SSN ECM
XSEL-SAX4(IXA用) 4 三相AC200V - - ● ● ● ● ● - - - ● ● - - - 36666 - 総合カタログ2021・8-291
(注) DV、CCなどのネットワーク略称記号については、 総合カタログ2021・8-17 ページをご確認ください。
7 IXA-4NHN10040
71
39
40 29
10 10
12
φ
13 37 0° 2 h7
30 8.5 25
25
71
40
936.5 (8)
246.5 122 40
80 220 180
8 400ST 8 200
120
255
137°
297
R400
142°
R376.5
12.5 227.5
40 130
341.5 100 117 170
627.5 (4.5) 220 20
655.5 (13) 255
22
137
°
137
°
R400
142°
.5
R37
6
中空
21φ
Page9
お問合せは
0800-888-0088 IXA スカラロボット
IXA-4NHN10040 8
Page10
IXA-4NHN12040
IXA スカラロボット
IXA-4NHN12040 バッテリー アーム長レスアブソ 1200mm
■ 型式項目
I XA - 4 N HN 1 20 40 - - T2 -
シリーズ - 軸数 タイプ アーム長 上下軸ストローク - ケーブル長 - 適応コントローラー - オプション
4 4軸 NHN 高可搬タイプ 120 1200mm 40 400mm N なし T2 XSEL-SAX 下記オプション
5L 5m 価格表参照
10L 10m
□L 長さ指定
(1m単位)
水 平 垂 横立て
直 天吊り
■ 価格表(標準価格) (1)(注 1)~(注 8)は、1 5 ページをご参照ください。
型式 標準価格 (2)加減速度は、搬送する物の質量および移動距離、場所により最大設定
IXA-4NHN12040 - 値が変化します。また、最大設定値での連続動作を行うと過負荷エラー
が出る場合があります。連続動作を行う際は加減速値を下げるか、
■ オプション価格表(標準価格) デューティー比(目安)を参考にして加減速後に停止時間を設けてく選定上の ださい。
名称 型式 参照頁 標準価格 注意 (3)モーター交換を行った時などは、アブソリュートリセットを行う必要
拡張ユーザーケーブル内蔵仕様 EXC 16 - があります。回転軸 (4 軸目 ) のアブソリュートリセットには、調整ジ
グが必要となります。詳細は 17 ページをご参照ください。
■ 別売オプション価格表(標準価格) (4)スカラロボットは 100%の速度・加速度で連続運転は出来ません。
動作可能条件は「加減速度設定の目安」ページをご確認ください。
名称 型式 参照頁 標準価格
ユーザーケーブル CB-IXA-USR□□□-CS 1 7 -
フランジ IXA-FL-1 17 -
外部配線保護フランジ ※1 IXA-PFL-EW-1 17 -
R軸配線保護フランジ IXA-PFL-RW-1 17 -
Z軸配線側面ステー Z軸400st IXA-SST-ZW-2 18 -
Z軸配線上面ステー Z軸400st IXA-TST-ZW-2 18 -
ソレノイドバルブセット ※1 IXA-SVP-1 18 -
※1 外部配線保護フランジとソレノイドバルブセットの同時取付けはできません。
(注) 別途ご注文ください。
■ ケーブル長価格表(標準価格)
種類 ケーブル記号 4軸仕様
標準タイプ 5L (5m) - 10L( 10m) -
1L (1m) ~ 4L (4m) -
6L (6m) ~ 9L (9m) -
11L (11m) -
長さ指定 12L (12m) -
13L (13m) -
1 4L( 14m) -
15L (15m) -
(注) 下記ケーブルの合計金額となります。
[4軸仕様]モーターケーブル:4本 ・エンコーダーケーブル:4本 ・ブレーキケーブル:1本
9 IXA-4NHN12040
Page11
お問合せは
0800-888-0088 IXA スカラロボット
■ メインスペック
項目 内容4軸仕様 項目
内容
4軸仕様
最大可搬質量(kg()注1) 50 水平面内 ±0.05mm
合成最高速度(mm/s) 8308 位置繰返し精度 上下軸 ±0.02mm
速度 第1アーム(度/s) 270
(注4) 回転軸 ±0.01度
(注2) 各軸最高速度 第2アーム(度/s) 380 ユーザー配線 10心(9心+シールド) AWG24(定格30V/MAX1A)上下軸(mm/s) 1200 ユーザー配管 外径φ6 内径φ4 エアチューブ3本回転軸(度/s) 920 (最高使用圧力0.6MPa)
押付け(N)(注3) 上限 570 アラーム表示灯(注5) アンバー色LED 小型表示灯1個 DC24V供給必要下限 70 ブレーキ解除スイッチ(注6) 上下軸落下防止用ブレーキ解除スイッチ
アーム長(mm) 1200 先端軸 許容トルク 15N・m
各軸アーム長(mm) 第1アーム 800 許容負荷モーメント 48N・m第2アーム 400 使用周囲温度・湿度 0~40℃、20~85%RH以下(結露なきこと)
第1アーム(度) ±137 保護等級 IP10
各軸動作範囲 第2アーム(度) ±142 耐振動・耐衝撃 衝撃・振動が加わらないこと上下軸(mm) 400 騒音(注7) 85dB未満
回転軸(度) ±360 海外対応規格 CEマーク、RoHS指令
モーター種類 ACサーボモーター
第1アーム 1,000W
モーター容量 第2アーム 750W上下軸 600W
回転軸 200W
エンコーダー種類 バッテリーレスアブソリュート
エンコーダーパルス数 131,072 pulse/rev
納期 ホームページ[納期照会]に記載
■ サイクルタイム ■ 先端軸許容負荷慣性モーメント
標準/連続サイクルタイムは下記の条件で、最速となる往復の動作設定にて動作をした 第4軸許容慣性モーメントは、スカラロボットの第4軸(回転軸)の回転中心換算の慣性
場合の所要時間を表します。 モーメント許容値です。第4軸回転中心からツール重心までのオフセット量は、以下の
2kg 搬送、上下移動25mm、水平移動300mm(粗位置決めアーチモーション) 数値以内としてください。ツール重心位置が第4軸中心位置を離れた場合は、速度・加
【標準サイクルタイム】 速度を適宜落とす必要があります。負荷や動作条件によって張出し長は制限されます。
最速動作の場合の所要時間です。一般に高速性能の目安となります。 軸数 先端軸許容負荷慣性モーメント
最速動作での連続動作はできませんのでご注意ください。 4軸仕様 0.5 kg・m2
【連続サイクルタイム】
連続動作を行う場合のサイクルタイムとなります。
項目 時間
標準サイクルタイム 0.61秒
連続サイクルタイム 0.69秒
水平移動
上下移動
負荷
重心
水平方向
水平方向 上下方向
200mm以下 150mm以下
IXA-4NHN12040 10
上下方向
Page12
IXA スカラロボット
■ 加減速度設定の目安
スカラロボットIXAは、カタログの最大加減速度、最大速度での連続運転は出来ません。最大加減速度で動作する場合は、連続運転デューティー比の目安グラフを参考に停止時間
を設けてください。連続で動作が必要な場合は、加減速度設定の目安グラフの、連続運転目安範囲の加減速度設定で動作させてください。
(1) PTP動作の場合は必ずプログラム上にてWGHT命令を使って、質量、慣性モーメントを設定し動作させてください。スカラは各可搬質量で動作することの出来る最大加減速度を100%としています。
同じ加減速度、速度設定でも搬送質量が異なると、動作時間も異なりますのでご注意ください。PTP動作の加速度、減速度で設定した値(%)は、最適速度・最適加減速度機能により、速度および加減
速度は搬送負荷質量、移動姿勢によって、設定した値が運転可能な値に調整されます。ただし、最適加減速度機能は、あらゆる動作パターンで動作可能であることを保証するものではありません。
(2) 加減速度は連続運転目安値より徐々に設定値を上げて調整するようにしてください。
(3) 過負荷エラーが出る場合は加減速度を適宜下げるか、連続運転デューティー比の目安を参考に停止時間を設ける調整を行ってください。
(4) デューティー比(%)=(運転時間/(運転時間+停止時間))×100
(5) ロボットを高速で水平移動させたい場合は出来るだけ上下軸を上昇端付近で動作させてください。
(6) 慣性モーメント、搬送質量は許容値以下としてください。
(7) 可搬質量は第4軸回転中心の慣性モーメント、質量を示します。
(8) 質量、慣性モーメントに応じた適切な加減速度を守ってロボットを運転してください。守らなかった場合は、駆動部の早期寿命や破損、振動を招きます。
(9) 負荷の慣性モーメントが大きい場合、上下軸の位置によっては、上下軸に振動が発生する場合があります。振動が発生した場合は適宜加減速度を落として使用してください。
■ PTP動作
NHN120_PTP加減速度設定の目安 NHN120_PTP動作デューティー比設定の目安
100% 100%
33,50kg
90% 最大設定範囲 90% kg6
80% 180%
70% 70%
60% 60%
50%
連続運転目安範囲 50%
40% 40%
30% 30%
20% 20%
10%
10%
0%
0 5 8 10 1516 20 25 30 3335 40 45 50 0%
100% 80% 75% 60% 50% 40% 20% 0%
搬送負荷質量(kg) デューティー比(%)
0 負荷慣性モーメント(kg・m2) 0.5
■ CP動作
水平 上下
NHN120_CP加減速度設定の目安 NHN120_CP加減速度設定の目安
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作
1.2G 1.2G
最大設定範囲
1.0G 連続運転目安範囲 1.0G
最大設定範囲
最大速度1200mm/s
0.8G 0.8G 連続運転目安範囲
最大速度1200mm/s
0.6G 0.6G
0.5G 0.5G
0.4G 0.4G
0.2G 0.2G
0.05G
0.0G 0.0G
0 5 10 1516 20 25 30 3335 40 45 50 0 5 8 10 1516 20 25 30 33 35 40 45 50
搬送負荷質量(kg) 搬送負荷質量(kg)
0 負荷慣性モーメント(kg・m2) 0.5
NHN120_CP動作デューティー比設定の目安 NHN120_CP動作デューティー比設定の目安
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作
1.2G 1.2G
8kg,16kg 8kg
1.0G 1.0G
0.8G 0.8G
0.6G 0.6G
33kg,50kg 16kg
0.5G 0.5G
0.4G 0.4G
33kg
0.2G 0.2G
50kg
0.05G
0.0G 0.0G
100% 80% 60% 40% 20% 0% 100% 80% 60% 40% 20% 0%
デューティー比(%) デューティー比(%)
11 IXA-4NHN12040
加減速度(G) 加減速度(G) 加減速度(%)
加減速度(G) 加減速度(G) 加減速度(%)
8kg
Page13
お問合せは
0800-888-0088 IXA スカラロボット
■ CP動作 速度・加減速度制限
水平 上下
NHN120_上下軸(Z軸)動作なし水平移動動作 NHN120_上下軸(Z軸)のみの動作
1400 1400
1.0G 0.5G
1200 1200
1000 1000 1.0G
1.0G 0.5G 0.5G 0.2G
860
800 800
600 600
430
400 400
0.05G
200 200
0 0
0 5 10 15 20 25 30 3335 40 45 50 0 5 810 1516 20 25 30 3335 40 45 50
搬送負荷質量(kg) 搬送負荷質量(kg)
IXA-4NHN12040 12
CP速度(mm/s)
CP速度(mm/s)
Page14
IXA スカラロボット
■ 寸法図
CAD図面がホームページよりダウンロード出来ます。
www.iai-robot.co.jp
■ IXA-4NHN12040 ST:ストロークM.E.:メカニカルエンド
(注) ケーブル接続に関しては 15 ページ(注8)を参照ください。 S.E.:ストロークエンド
R
グロメット 1
117 2-M5深さ10
3
(拡張ユーザーケーブルオプション(型式:EXC)設定時 .5
35.5 81.5 M4深さ8(アース接続用)45 50 50 ケーブル取出し用) 基準面
19.5
19.5 40.5 C W Y Y
詳細図 K
黒
白 ベース取付け穴詳細
φ13
赤
6-M5深さ10 ブレーキ解除スイッチ
詳細図 C LED表示灯
6-M5深さ10 (アンバー色)
130 50 K
ユーザーねじ穴詳細 20 2203-φ6エアチューブ
詳細図 W ワンタッチ継手 415 断面図 Y-Y
ユーザー配線用D-subコネクター (1588)
(9極、ソケット、固定具M2.6) ユーザーパネル詳細 70 1200 (318) (4箇所)
配線:24AWG、10心(9心+シールド) 400 800
4-M5深さ8
(反対側も同様)
M.E.
原点 P 80
26
(100) X
基準面 130 285 配線空間
着座面
断面図 Z-Z (33)
S.E. グロメット
4 N9 M.E. (拡張ユーザーケーブルオプション(型式:EXC)設定時コネクター取付け穴)
Z Q ユーザー配線用D-subコネクター
Z 4-M5深さ10
(15極、プラグ、固定具M2.6)
配線:24AWG、
(R) 10心(9心+シールド)114.1
35.5 60
N 3-φ6エアチューブ
詳細図 P 225 30 ワンタッチ継手
+0.015 2-M5深さ10 40 φ10 H7リーマー深さ10 黒10 0 深さ10 白
(ベース着座面より) 詳細図 N 赤
R) ユーザーねじ穴詳細 モーター・エンコーダー( ケーブル接続
(1軸目)
モーター・エンコーダー
詳細図 Q ケーブル接続
ベース長穴詳細 (2軸目~4軸目)ブレーキケーブル接続
詳細図 X
R1 0 背面パネル詳細20 200 R1
(440) (440)
R80
0 R800
R40 00 (75) (75) R40
160 160
117.6 °° 117.6
左腕系 動作範囲 右腕系 動作範囲
■ 質量
項目 内容
質量 84.0kg
■ 適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
名称 外観 最大接続
制御方法
可能軸数 電源電圧 ポジショナー パルス列 プログラム ネットワーク ※選択 最大位置決め点数 標準価格 参照ページDV CC CIE PR CN ML ML3 EC EP PRT SSN ECM
XSEL-SAX4(IXA用) 4 三相AC200V - - ● ● ● ● ● - - - ● ● - - - 36666 - 総 合カタログ2021・8-291
(注) DV、CCなどのネットワーク略称記号については、 総合カタログ2021・8-17 ページをご確認ください。
13 IXA-4NHN12040
40
10 10 71
29 39
12 φ30
13 h7° 2 7
30 8.5
71 25
25 936.5 (8)
246.5 122 40
80 220 180
8 400ST 8 40
200
120
255
137 297°
R400
142°
R543.8
12.5 227.5
40 130
341.5 100 117 170
627.5 (4.5) 220 20
655.5 (13) 255
22
37°1
137
°
R400
142°
543
.8
R
中空
φ2
1
Page15
お問合せは
0800-888-0088 IXA スカラロボット
IXA-4NHN12040 14
Page16
注意事項
注意事項
(注1) 可搬質量は搬送可能な最大質量になります。
プログラム上で負荷の質量、慣性モーメントを設定することで、自動で最適な加速度が設定されます。
可搬質量 負荷質量が大きくなるほど、加速度ブがレ落ーちキケるー設ブ定ル(と最な長り15まmす)。
モーターケーブル(最長15m)
(注2) スペックの最大動作速度の数値は、PTP命令動作の場合です。
CP動作命令(補間動作)の場合は、高速での動きには限界がありますのでご注意ください。
PTP動作時 コントローラーへ接続
最大動作速度
300mm エンコーダーケーブル(最長15m)
(注3) 第3軸押付け力制御範囲は、上下軸先端部の押付け力です。
第3軸に何も取付けられていない無負荷時の押す力となります。
第3軸 連続押付けはできません。
押付け力制御範囲 上限は押付け力の設定値が70%の場合の押付け力です。
下限は設定値が20%の場合の押付け力です。
ブレーキケーブル(最長15m)
実際の押付け力は多少の誤差を生じます。
第2アーム/上下軸/回転軸
モーターケーブル、エンコーダーケーブル
(最長15m)
(注4) 動作開始ポジションと位置決めポジションの2点間において、同じ速度、加減速度、腕系で繰返し動作さ
せた時の位置決めの再現性を表します(JIS B 8432_周囲温度20℃一定時の値です)。絶対位置決め精
位置繰返し精度 度ではありませんのでご注意ください。また腕系を切り替えた場合や、異なコるン複トロ数ーのラーポへジションから位置
決めポジションに位置決めした場合、動作速度、加減速度設定などの運転条件を接変続化させた場合は、位置
繰返し精度の仕様値を外れる場合がありますのでご第注1ア意ーくムださい。
モーターケーブル、エンコーダーケーブル
(最長15m)
(注5) アラーム表示灯はユーザーパネル部に設置されています。
コントローラーがエラー3を00発m生m した場合などに点灯させることがでますが、使用する場合はお客様がコ
アラーム表示灯 ントローラーのI/O出力の信号を使って、ユーザー配線内にあるLED端子にDC24Vを加える回路を組
むことにより動作します。
(注6) ブレーキ解除スイッチはユーザーパネル部に設置されています。
ブレーキの解除を行うには、ブレーキ解除ス第イ2ッアーチムの/使上用下軸・不/回使転用軸にかかわらず、ブレーキ解除 コントローラーへのDC24V電源の供給モがータ必ー要ケでーブル、エンコーダーケーブル(す最。長15m)
スイッチ
(注7) 全軸が最大速度で動作した時の測定値です。 コントローラーへ
騒音は、動作条件および周囲反射環境により変わる場合があります。 接続第1アーム
騒音 モーターケーブル、エンコーダーケーブル(JIS B 6195) (最長15m)
動作範囲 腕系切替えの際はいった2mんアームが直線上にブレ伸ーびキまケーすブのル(で最、長周1辺5m機)器との干渉にご注意ください。
(注8)
ケーブル ブレーキケーブル(最長15m)
第2アーム/上下軸/回転軸
モーターケーブル、エンコーダーケーブル
(最長15m)
コントローラーへ
接続
第1アーム エンコーダーケーブル
(最長15m)
第1アーム モーターケーブル
(最長15m)
300mm
15 注意事項
Page17
オプション・メンテナンス部品
オプション・メンテナンス部品
オプション・メンテナンス部品
オプション
拡張ユーザーケーブル内蔵仕様
型 式 EXC 説 明 スカラロボット本体内に下記①から③のケーブルを本体に内蔵します。
本体質量は0.5㎏増加します。
コネクタ
ケーブル種類 用途例
ユーザーパネル側 背面パネル側
TM21CP-88P(03) 09_45_452_1561
① Ethernetケーブル ビジョンカメラなど
(ヒロセ電機) (HARTING)
7心:DF11-8DS-2C ソレノイドバルブ電源線
LF10WBRB-12P
② 10心複合ケーブル (ヒロセ電機) (ソレノイドバルブセットオプションに対応)
(ヒロセ電機)
3心:切り離し ビジョンカメラ電源など
DF62C-24S-2.2C DF62P-24EP-2.2C 動力線、信号線
③ 13心複合ケーブル
(ヒロセ電機) (ヒロセ電機) 電動グリッパー(RCP4-GRシリーズ)
③ ① ② ユーザーパネル側 背面パネル側
① ②③
ケーブル取出し用グロメット
ケーブル取出し用グロメット
①Ethernetケーブル ②10心複合ケーブル
識別 信号 ピンNo. ピンNo. 信号 識別 識別 信号 ピンNo. ピンNo. 信号 識別
青 ー 4 4 ー 青 赤 SV1a 1 1 SV1a 赤
白 ー 5 5 ー 白 白 SV1b 2 2 SV1b 白
橙 ー 6 6 ー 橙 黒 SV2a 3 3 SV2a 黒
白 ー 3 3 ー 白 青 SV2b 4 4 SV2b 青
緑 ー 2 2 ー 緑 緑 SV3a 5 5 SV3a 緑
白 ー 1 1 ー 白 黄 SV3b 6 6 SV3b 黄
茶 ー 8 8 ー 茶 茶紫 COM 7 7 COM 茶紫
白 ー 7 7 ー 白 ー ー 8 8 24V(+) 赤
ー SHIELD BODY BODY SHIELD ー 9 GND 黒
識別 信号 ピンNo. 10 FG 緑/黄
シース シールド 赤 24V(+) ー 11〜12 ー ー
黒 GND ー
緑/黄 FG ー
シース
③13心複合ケーブル
シース
識別 信号 ピンNo. ピンNo. 信号 識別
赤 A 3 3 A 赤
白 VMM 5 5 VMM 白
黒 /A 4 4 /A 黒
茶 B 10 10 B 茶
黄 VMM 9 9 VMM 黄
緑 /B 15 15 /B 緑
黄 A 1 1 A 黄
白 /A 6 6 /A 白
赤 B 11 11 B 赤
緑 /B 16 16 /B 緑
黒 Vcc 21 21 Vcc 黒
茶 GND 7 7 GND 茶
青 VPS 18 18 VPS 青
ー SHIELD 24 24 SHIELD ー
単線 半田 半田 単線
シールド
オプション・メンテナンス 16
Page18
オプション・メンテナンス部品
単品オプション・メンテナンス部品
単品オプション メンテナンス部品
タイプ ※配線・配管用オプション
シリーズ タイプ
名称 ユーザー 配線・配管用 アブソリュートフランジ 品名 型式
ケーブル オプション リセット調整ジグ
外部配線保護フランジ IXA-PLF-EW-1
10040 R軸配線保護フランジ IXA-PLF-RW-1
高可搬
IXA NHN IXA-FL-1 CB-IXA-USR□□□ -SC ※ JG-IXA4 Z軸配線側面ステー (Z軸)400ST IXA-SST-ZW-2
タイプ
12040 Z軸配線上面ステー (Z軸)400ST IXA-TST-ZW-2
ソレノイドバルブセット IXA-SVP-1
フランジ アブソリュートリセット調整ジグ
上下軸アーム先端に物を取付ける場合にご使用ください。 モーター交換時にエンコーダーのアブソリュートデータが消
45° 失し、アブソリセットが必要な場合に使用する調整ジグです。
■ 単品型式 IXA-FL-1 φ72 4-φ9φ30 H7
(単品質量:2.0㎏/材質:鋼) 0φ10φ6 H7 ■ 単品型式 JG-IXA4
φ50 h7
φ118
ユーザーケーブル
背面パネルのユーザー配線用D-subコネクターに接続して使用するユーザーケーブルです。
■ 単品型式 CB-IXA-USR□□□-CS ※□□□はケーブル長さ(L)を記入、最長15mまで対応 例)050=5m
チューブ記号 識別 信号 ピンNo. ピンNo. 信号 信号 チューブ記号
[コントローラー側] [メカ側] U1 青 U1 1 1 U1 3
150 L U2 白 U2 2 2 U2 5U3 黄 U3 3 3 U3 4
U4 白 U4 4 4 U4 10
U5 緑 U5 5 5 U5 9
U1 U6 白 U6 6 6 U6 15 U
U2 U7 赤 U7 7 7 U7 1
U3 U8 白 U8 8 8 U8 6
U9 紫 U9 9 (白) 9 U9 11
ー ー ー 10〜13 10〜13 ー 16
U9 LED+24V 青 LED+24V 14 14 LED+24V 21
LED+24V LED-24V 茶 LED-24V 15 15 LED-24V 7
FG 黒 FG ー 編組シールドはフードにクランプ
LED-24V
FG 単線 半田 編組 シース
外部配線保護フランジ
ロボット外部にて配線を行う場合、配線を保護するフランジです。
※本オプションを使用する場合は、ユーザーパネルのD-subコネクターは使用できなくなります。
φ32(中空径)
■ 単品型式 IXA-PLF-EW-1 φ32(中空径)
(単品質量:0.6㎏/材質:アルミ、鋼)
(注)フランジ1個分の型式です。必要数量をご手配ください。
R軸配線保護フランジ
先端軸中空部に配線を通す場合に、配線を保護するフランジです。
■ 単品型式 IXA-PLF-RW-1
(φ21)
(単品質量:0.3㎏/材質:アルミ、鋼)
17 オプション・メンテナンス
(8.5)
3 40
10
U
(35)
φ35(中空径)
(43)
(43)
(
(37) 45°)
φ35(中空径)
(35)
(45°)
)
φ6
5
(
Page19
XSEL-SAX コントローラー
オプション・メンテナンス部品
Z軸配線側面ステー
先端軸の中空部を使用せず、Z軸側面での配線を行うステーです。
■ 単品型式 IXA-SST-ZW-2( Z軸ストローク400㎜)(単品質量:0.9㎏/材質:鋼)
(40)
(60)
(28) (82)
(40)
Z軸配線上面ステー
Z軸動作に合わせて、ユーザーパネルからジョイントブラケットUに配線を補助するステーです。
■ 単品型式 IXA-TST-ZW-2( Z軸ストローク400㎜)(単品質量:0.25㎏/材質:鋼)
ジョイント
ブラケットU
25)(
(φ8)
(R φ8
)
10 (0) 補助図 S
(25)
U
補助図 U
ソレノイドバルブセット
先端にエアチャックを取付ける場合に使用できるソレノイドバルブのオプションです。
ソレノイドバルブへの電源供給をロボット内蔵ケーブルで行う場合は、
拡張ユーザーケーブル内蔵(オプション:EXC)を選択してください。
■ 単品型式 IXA-SVP-1
(単品質量:0.5㎏)
(7.5) (50) (47.5) (21) (43.2) (6.9)
(105) (71.1)
二次配管接続用継手φ4またはφ6
Bポート Aポート 型式 F10M3Fstn.1〜3 F10T3-FJ-CPS DC24V
SV1b SV1a メーカー コガネイ
SV2b SV2a ポジション数 3ポジション
SV3b SV3a ポート数 5
弁機能 クローズドセンタ
使用流体 空気
作動方式 内部パイロット形
音速コンダクタンス 0.93 dm3/(s・bar)
有効断面積(Cv値) 4.6mm2(0.25)
配管接続口径 φ4、φ6両用継手
使用圧力範囲 0.2〜0.6MPa
電磁弁排気用継手φ6(R2 ポート) 電磁弁排気用継手φ6(R1 ポート)
定格電圧 DC24V
一次配管接続用継手φ6(P ポート) 給油 不要
オプション・メンテナンス 18
(400)
(80)
(75°)
(35)
(181) (275)
(200)
(60°)
(97) (156)
R60
)
(
) (R9
6)
(R6
6
Page20
型 式、付加軸の接続に関する制限、システム構成
XSEL-SAX コントローラー
スカラロボット用
プログラムコントローラー
型 式
XSEL - SAX4 - - - - - 3
シリーズ タイプ スカラロボット ネットワーク専用スロット I/Oスロット I/O 電源
本体タイプ (スロット1) (スロット2) (スロット1()スロット2) ケーブル長 電圧
4NHN10040 IXA-4NHN10040 E 未使用 E 未使用 0 ケーブルなし
4NHN12040 IXA-4NHN12040 EP EtherNet/IP N1 入力32/出力16(NPN) 2 2m(標準)
EC EtherCAT N2 入力16/出力32(NPN) 3 3m
N3 入力48/出力48(NPN) 5 5m
E 未使用 P1 入力32/出力16(PNP)
DV DeviceNet P2 入力16/出力32(PNP)
CC CC-Link P3 入力48/出力48(PNP) 3 三相200V
CIE CC-Link IE Field (※)ネットワーク専用スロットは、
選択可能なボードが決まっています。
PR PROFIBUS-DP (※)ネットワーク専用スロットとI/Oスロットは併用可能です。
(※)EPとCIEの同時接続はできません
付加軸の接続に関する制限
高可搬タイプのスカラロボットは付加軸の接続はできません
システム構成
■XSEL-SAXタイプ PLC
オプション フィールドネットワーク
パソコン専用ティーチングソフト DeviceNetCC-Link
(21~22ページ参照) CC-LinkIEField
※Ⓟ=PC側、Ⓒ=コントローラー側
オプション PROFIBUS-DPⓅRS232−ⒸRS232 EtherCAT
〈型式:IA-101-XA-MW〉(SAX用) ティーチングボックス EtherNet/IP
ⓅUSB−ⒸUSB/Ethernet (21ページ参照)
〈型式:IA-101-N〉 〈型式:TB-02-□〉 コントローラーに付属
ダミープラグ コントローラーに付属
(21ページ参照)
〈型式:DP-2〉 PIOケーブル
(23ページ参照)
〈型式:CB-X-PIO/PIOH020〉
標準2m
(PIO仕様のコントローラーに付属)
パソコン専用
ティーチングソフトに付属
通信ケーブル
〈型式:CB-ST-A2MW050-EB〉(SAX用) 拡張モーション
(非常停止
PCON/ACON/
) (ケーブルはお客様にて用意)スイッチ 5m SCON-CB
(MECHATROLINK-Ⅲ仕様)
※駆動源遮断回路の詳細は
駆動源遮断回路 お問合せください。
USB/Ethernetケーブル( ケーブルはお客様にて用意) モーター電源 三相 (お客様にて用意)
AC200V/230V
※電源を接続する際は必ず以下の
制御用電源 単相 フィルター相当品を取付けてください。
AC200V/230V ● ノイズフィルター 推奨機種
三相 NF3030C-SVF(メーカー 双信電機)
●IXAシリーズ ブレーキ解除用 ● リングコア 推奨機種
回生抵抗ユニットに付属 電源 ESD-R-25(メーカー NECトーキン)
DC24V ● クランプフィルター 推奨機種
回生抵抗ユニットケーブル 1m 制御電源用 ZCAT3035-1330(メーカー TDK)
I/O用電源 モータ電源用 E04SR401938(メーカー SEIWA)
オプション 回生抵抗ユニット DC24V ● サージプロテクター 推奨機種
三相 R・A・V-781BXZ-4
回生抵抗ユニットの必要数の目安に 単相 R・A・V-781BWZ-2A
ついては21ページをご覧ください。 (メーカー 岡谷電機産業)
19 XSEL-SAX