



IoTで故障診断を行うための基礎知識をご紹介
振動とは?といった入口の部分から、振動センサの種類、分析方法の概要までをご紹介致します。
また併せて独自の解析を行うOMNIedgeについても簡潔にご紹介致します。
このカタログについて
| ドキュメント名 | 【技術資料】振動解析の基礎 |
|---|---|
| ドキュメント種別 | ホワイトペーパー |
| ファイルサイズ | 2Mb |
| 取り扱い企業 | THK株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ



このカタログの内容
Page1
【技術資料【技】振術資動料解】 析の基礎
Copyright THK CO., LTD. 2022. All rights reserved.
Page2
目次
□ はじめに □ サンプリングについて
サンプリング周波数
□ 振動基礎 振幅分解能
振動・衝撃って何?
変位・速度・加速度の関係 □ 信号処理
自由振動と強制振動 振動の特徴を表す指標
固体内を伝搬する振動 帯域制限
周波数分析1:オクターブ
□ センサの種類 周波数分析2:FFT
振動の測定方法 オクターブバンド解析とFFT解析の違い
振動センサの種類 スペクトログラム
エンベロープ処理
□ 圧電型加速度センサ
□ 波形シミュレーション
圧電型加速度センサの代表的な特定値
センサの設置方法による影響
□ 振動を計測するにあたって
センサ設置によるグランドループの影響
□ THKからのご提案
Copyright THK CO., LTD. 2022. All rights reserved.
Page3
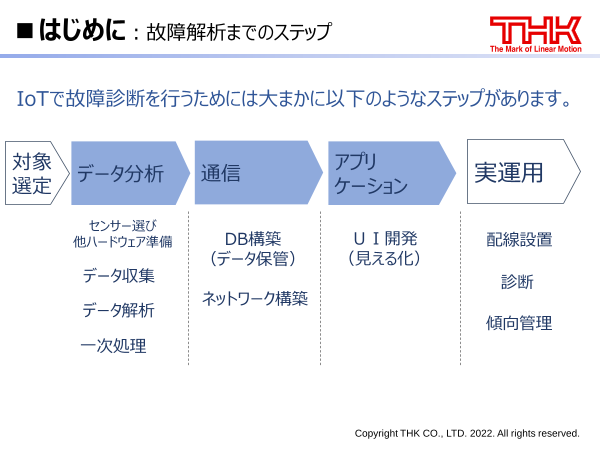
■はじめに:故障解析までのステップ
IoTで故障診断を行うためには大まかに以下のようなステップがあります。
対象 アプリ
データ分析 通信 実運用
選定 ケーション
センサー選び
他ハードウェア準備 DB構築 UI開発 配線設置
(データ保管) (見える化)
データ収集 診断
ネットワーク構築
データ解析
傾向管理
一次処理
Copyright THK CO., LTD. 2022. All rights reserved.
Page4
■はじめに:つまずき易い工程は?
故障診断は最初のデータ分析でつまずきがち。機器のコスト負担も大きい
対象
データ分析 通信 アプリケーション
選定 実運用
(ネットワーク構築)
センサー選び
他ハードウェア準備
データ収集
実際に良くお聞きするお悩み
データ解析 色々購入してデータ収集したはいいけど…
そこからどうしよう
一次処理
(振動センサーからのアナログデータ)
Copyright THK CO., LTD. 2022. All rights reserved.
Page5
■はじめに:データ分析での苦労
最適解を見つけるため仮説⇔検証の「繰り返し」を行う必要があります
対象部品 取得するデータ 計測器・センサ
振動 温度 測定レンジや
分解能などを
音 電流 確認して選定
測定条件 解析、判定モデル 交換部品による分析
速度 FFT 交換前後の
回転数 部品調査を行い
手戻りも モデル修正の場合も MT データ量が膨大に
壊れ方とデータ
運動パターン エンベロープ との整合を取る
繰り返しによる判定モデルの精度向上が必要
THKでは現場ですぐに使えるIoTをご提案しております。
最後にご紹介しておりますので是非そちらもご覧ください。
Copyright THK CO., LTD. 2022. All rights reserved.
Page6
次ページからは、故障診断に多く用いられている
振動解析の基礎をご紹介致します。
Copyright THK CO., LTD. 2022. All rights reserved.
Page7
■ 振動・衝撃って何?
JIS B 0153による定義
振動とは、「ある座標系に関する量の大きさが平均値より交互に大きくなったり小さくなったりする変動」
と定義されており、 量には次のようなものがあります
・変位 ある座標系に対して、物体または質点の位置の変化を表すベクトル量
・速度 変位の時間微分で規定されるベクトル
・加速度 速度の時間微分で規定されるベクトル
※用途によっては、ジャークを対象に含むこともある
・ジャーク 加速度の時間微分で規定されるベクトル
衝撃とは「系に過渡的変化をもたらす力、位置、速度または加速度の変化」と定義されています
Copyright THK CO., LTD. 2022. All rights reserved.
Page8
■ 変位、速度、加速度の関係
単純1軸バネによるおもりの振動を考えます
x
時間 t における おもりの変位 x は、
最大振幅を D 、角振動数を ω とすると
以下の式であらわされます D
? = ?????? ? t
? = 2?? ???Τ? 1 / f
速度は、xの時間微分、また加速度は速度の時間微分であることから、
?
? = = ??????? ?Τ?
??
?
? = = −??2????? ?Τ?2
??
対象となる振動の周波数が低いのであれば、変位 あるいは 速度 高いのであれば
加速度が観測しやすい!
Copyright THK CO., LTD. 2022. All rights reserved.
Page9
■ 自由振動と強制振動
動機械で見られる振動には、大きく次の2種類に分類できます
自由振動 機械が持つ固有振動数に依存する振動のことをさします
外部から力などの入力があると、固有振動数と同じ周波数の振動が発生します
衝突などのインパルス入力に対しては、ほぼこの自由振動が発生します
強制振動 モータなどの動力などにより、強制的に揺らされる振動のことをさします
これは、入力の変動に近似した周波数の振動であり、機械の運転条件に依存します
例えば、モータの回転数を2倍にすると、観測される振動周波数が2倍になる などがあります
このほかに、固有振動数に近い周波数の強制振動が加わると起こる共振 や
近い周波数成分の振動が複数ある場合に発生する うなり などがみられる場合もあります
Copyright THK CO., LTD. 2022. All rights reserved.
Page10
■ 固体内を伝搬する振動(波)
前項までは、見たい対象である系全体が振動している場合を考えましたが、このほかに
固体内を伝搬する振動があります
同一個体内 あるいは 機械的に締結された構造体などでは、振動が固体内を伝わり、
おおきな振動として計測されることがあります
固体表面を伝わる波
外部入力
固体内を伝わる波
外部入力に対して、系全体が振動する 外部入力に対して、固体を伝搬する振動
実際の機械では、系全体の振動のほかに、固体内を伝搬する振動が合成されて、
非常に複雑な振動が観測されます
Copyright THK CO., LTD. 2022. All rights reserved.
Page11
■ 振動の測定方法
振動を計る場合、空間に基準となる静止系を設けて、その点からの振動体までの変位量を
測定する方法1)と振動計などを振動体に取り付けて、その出力2)から求める方法があります
2)静止系が不要
1) 対象
静止系(基準点)
Copyright THK CO., LTD. 2022. All rights reserved.
Page12
■ 振動センサの種類
振動を計るための代表的なセンサとして、次のようなものがあります
渦電流型 検出範囲に制限があり、周波数応答も低い
非接触型 静電容量型 検出範囲に制限があるが、周波数応答が高い
光学型 検出範囲も広く、周波数応答も高いが、高コスト
振動センサ
MEMS型 小型化、デジタル化に適しており、利用範囲が広がっている
圧電型 周波数範囲が広く、加速度計として最も利用される
接触型
動電型 高感度で、周波数応答が低く、速度計として利用
ストレイン・ゲージ型 丈夫、周波数応答が低く、変位、速度計として利用
使用するセンサに合わせて、ケーブル、アンプなど専用の機器が必要な場合があります
なお、それぞれのセンサに関する詳細は、各センサメーカーに問い合わせください
Copyright THK CO., LTD. 2022. All rights reserved.
Page13
■ 圧電型加速度センサ
圧電型加速度センサには、代表的な2つの特性値があります
・ ダイナミックレンジ 測定可能な加速度の大きさの範囲を表します
・ 周波数帯域 センサとして使用可能な(一般的には感度が平坦な)周波数帯域を表します
共振周波数
30 40
位相特性
0 30
-30 20
( (
( 相 -60 10 レ
出 対 周波数特性 ス
力 位 -90 0 ポ
電 相 ン
圧 使用可能な加速度の大きさ -120 -10
角 ス
) ) 使用可能な周波数帯域 )
最低ノイズレベル -150 -20
-180 -30
(加速度) -210 -40
0.4 0.5 0.7 1 2 3 4 5 7 10 20 30 40 50
(周波数)
観測したい機械に対して、どれくらいの振動が発生するのか、どの程度の周波数帯域までみるのか?
をもとにセンサを選定する必要があります
Copyright THK CO., LTD. 2022. All rights reserved.
Page14
■ センサの設置方法による影響
センサを設置するには、対象物へねじで取り付けることが理想的とされています
取り付け方法によって、センサの共振周波数が低下していくことがあるので注意が必要です
50
( 40 ①
相 ②
対 30 ④
⑥
レ
20 ⑤
ス
ポ ③
10
ン
ス 0
)
-10
100 1,000 10,000 100,000
(振動数)
①ネジ固定 ④絶縁アタッチメント
②瞬間接着 ⑤マグネットアタッチメント
③両面テープ ⑥棒状アタッチメント
Copyright THK CO., LTD. 2022. All rights reserved.
Page15
■ センサ設置によるグランドループの影響
圧電型加速度センサには、センサケース部がSGとなっているものと、絶縁されているものがあります
センサケース部がSGの場合は、設置対象が金属の場合、グランドループを構成し、
ノイズが大きくなることがあるので注意が必要です
加速度ピックアップ
プリアンプ
or
チャージアンプ
ケーブル ケーブル XX
絶縁型だと グランドループ グランドループ
ここが切れる
アース
この場合、設置面が絶縁型のセンサを使用するか、センサ取付方法で絶縁するなどの対策が
有効となります
Copyright THK CO., LTD. 2022. All rights reserved.
Page16
■ サンプリング周波数
センサから出力される連続的なアナログ信号を、AD変換器を使用して、離散的な
デジタルデータに変換してから取り扱うことが一般的です
この時のデータ変換の周波数 f(サンプリング周波数)によって、取得される信号の形が変化することがあります
サンプリング周波数 f は、サンプリング周期 Δtの逆数となります
元の波形
離散化されたデータ
Δtが短い
適切なレートで離散化された波形
連続波形(アナログ)
Δtが長い
遅いレートで離散化された波形
Copyright THK CO., LTD. 2022. All rights reserved.
Page17
■ 振幅分解能
先ほどのサンプリング周期は時間軸の分解能でしたが、これとは別に、振幅分解能(適切でな
い?)があります。これは、振幅方向の分割数を表すもので、bit分解能とも呼ばれます
一般的に、AD変換器でうけることのできる最大振幅の p-p を 何分割するかを示すもので、分割数を2進数の
桁数であらわします(例えば、8bitの場合 = 2^8 = 256分割)
分解能が高い
適切な分解能で離散化された波形
分解能が低い
連続波形(アナログ)
低い分解能で離散化された波形
Copyright THK CO., LTD. 2022. All rights reserved.
Page18
■ 振動の特徴を表す指標:時間波形
振動の特徴を表す指標は、一定区間の範囲で観測された波形から求めることが一般的です
ピーク値
p-p値
実効値
大きさを表す代表的な指標として、次の3つがあります
ピーク値 対象区間の最大振幅から求めます
p-p値 対象区間の最大値と最小値の差から求めます
実効値 対象区間のrms値を算出して求めます
これとは別に、振幅分布のおおよその形を推測するものとして、波高率があります
波高率 = ピーク値 / 実効値
Copyright THK CO., LTD. 2022. All rights reserved.
Page19
■ 帯域制限1:時間波形
振動の特徴量を求める場合に、見たい周波数帯域から外れた周波数成分に大きな値を示す場合
があります。この場合には、観測された波形に対して、帯域制限の前処理を施すことが必要になります
ローパスフィルタ
低周波成分
観測された振動波形 ハイパスフィルタ
系の振動や衝撃のような振動が含まれる
高周波成分
この手法は観測したい振動の周波数がわかっている場合に有効な手法です
Copyright THK CO., LTD. 2022. All rights reserved.
Page20
■ 周波数分析1:オクターブ分析
前述では、見たい周波数がわかっている場合に適用可能ですが、観測される振動に
どのような周波数が含まれるかわからない場合があります
この場合には、オクターブ分析と呼ばれる手法が用いられます
オクターブ分析とは、基準周波数に対して、以下のような定義されたバンドパスフィルタを並列に並べて、
周波数帯域ごとに振動を分離する手法です
周波数
オクターブバンド処理 RMS値
この手法では、バンドパスフィルタを使用するため、おおまかな周波数分布がわかります
ただし振動の周波数がわからないこと、分割数が多くなると演算に負荷がかかるなどのデメリットがあります
Copyright THK CO., LTD. 2022. All rights reserved.