


⼯業⽤グレードを誇る慣性センサ3DM-GX-5 シリーズは、3 軸慣性計測、姿勢とナビゲーションの幅広いソリューションを提供しています。
ベストセラー3DM-GX4-25 の後継機でもある3DM-GX5-25 は超⼩型、超軽量のAHRS で、適応型カルマンフィルタを採⽤しています。計測のクオ
リティーにおける最適なコンビネーションを実現するために3軸に加速度計、ジャイロスコープ、磁⼒計、温度計を搭載しています。加えて傑出した
ダイナミックな姿勢推定のために新しい⾃動適応型拡張カルマンフィルタ(EKF)を⼩さな筐体の中の基板上のデュアルプロセッサで実⾏しています。
3DM-GX5-25 は幅広いアプリケーション、例えばプラットフォームのスタビリティーや⾞両のヘルス・性能モニタリングなどに最適なシステムです。
3DM シリーズのMIP Monitor ソフトウエアを使えばデバイスの設定、リアルタイムのデータモニタリング、データ取得が簡単に⾏えます。
このカタログについて
| ドキュメント名 | LORD Microstrain社のIMU/3DM-GX5-25 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 549.8Kb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社クレアクト (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
3DM-GX5-25 姿勢・機⾸基準システム (AHRS)
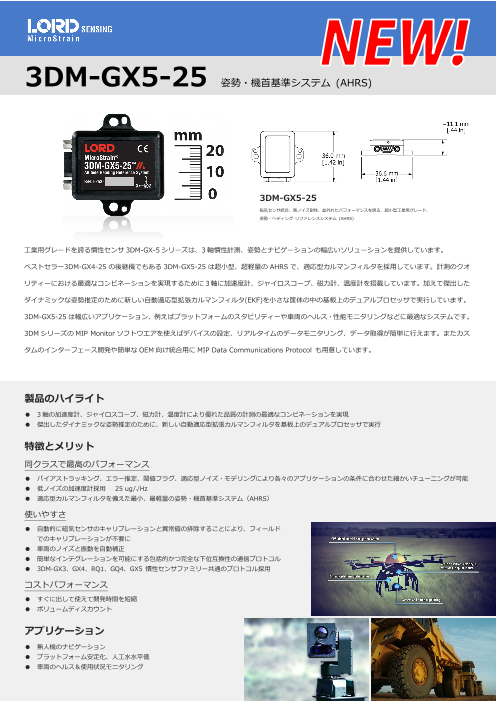
3DM-GX5-25
磁気センサ統合、⾼ノイズ耐性、並外れたパフォーマンスを誇る、超⼩型⼯業⽤グレード、
姿勢・ヘディング リファレンスシステム (AHRS)
⼯業⽤グレードを誇る慣性センサ 3DM-GX-5 シリーズは、3 軸慣性計測、姿勢とナビゲーションの幅広いソリューションを提供しています。
ベストセラー3DM-GX4-25 の後継機でもある 3DM-GX5-25 は超⼩型、超軽量の AHRS で、適応型カルマンフィルタを採⽤しています。計測のクオ
リティーにおける最適なコンビネーションを実現するために3軸に加速度計、ジャイロスコープ、磁⼒計、温度計を搭載しています。加えて傑出した
ダイナミックな姿勢推定のために新しい⾃動適応型拡張カルマンフィルタ(EKF)を⼩さな筐体の中の基板上のデュアルプロセッサで実⾏しています。
3DM-GX5-25 は幅広いアプリケーション、例えばプラットフォームのスタビリティーや⾞両のヘルス・性能モニタリングなどに最適なシステムです。
3DM シリーズの MIP Monitor ソフトウエアを使えばデバイスの設定、リアルタイムのデータモニタリング、データ取得が簡単に⾏えます。またカス
タムのインターフェース開発や簡単な OEM 向け統合⽤に MIP Data Communications Protocol も⽤意しています。
製品のハイライト
● 3 軸の加速度計、ジャイロスコープ、磁⼒計、温度計により優れた品質の計測の最適なコンビネーションを実現
● 傑出したダイナミックな姿勢推定のために、新しい⾃動適応型拡張カルマンフィルタを基板上のデュアルプロセッサで実⾏
特徴とメリット
同クラスで最⾼のパフォーマンス
● バイアストラッキング、エラー推定、閾値フラグ、適応型ノイズ・モデリングにより各々のアプリケーションの条件に合わせた細かいチューニングが可能
● 低ノイズの加速度計採⽤ 25 ug/√Hz
● 適応型カルマンフィルタを備えた最⼩、最軽量の姿勢・機⾸基準システム(AHRS)
使いやすさ
● ⾃動的に磁気センサのキャリブレーションと異常値の排除することにより、フィールド
でのキャリブレーションが不要に
● ⾞両のノイズと振動を⾃動補正
● 簡単なインテグレーションを可能にする包括的かつ完全な下位互換性の通信プロトコル
● 3DM-GX3、GX4、RQ1、GQ4、GX5 慣性センサファミリー共通のプロトコル採⽤
コストパフォーマンス
● すぐに出して使えて開発時間を短縮
● ボリュームディスカウント
アプリケーション
● 無⼈機のナビゲーション
● プラットフォーム安定化、⼈⼯⽔⽔平儀
● ⾞両のヘルス&使⽤状況モニタリング
Page2
3DM-GX5-25 姿勢・機⾸基準システム(AHRS)
技術仕様
⼀般 演算値
統合されたセンサ 3 軸加速度計、3 軸ジャイロスコープ、3 軸磁⼒計、⾼度計、温度計 姿勢精度 EKF出⼒: ±0.25° RMS ロールとピッチ、
データ出⼒ 慣性計測ユニット (IMU) 出⼒: ±0.8° RMS ヘディング (typ)
加速度、⾓速度、磁場、周囲圧⼒、deltaTheta、deltaVelocity CF 出⼒: ±0.5° RMSロールとピッチ、
演算出⼒: ±1.5° RMS ヘディング (typ)
拡張カルマンフィルタ (EKF): フィルタステータス、タイムスタンプ、姿勢推定 (オイラー 姿勢機⾸レンジ 360° 全軸
⾓、四元数、⽅位⾏列)、線&補正加速度、バイアス補正各加速度、気圧⾼度、無重⼒線加速度、 姿勢分解能 < 0.01°
ジャイロスコープおよび加速度計バイアス、スケールファクタと測定不確かさ、重⼒と磁器モデ 姿勢再現性 0.2° (typ)
ル、その他 演算更新レート 500 Hz
演算データ EKF出⼒: 1 Hz to 500 Hz
慣性計測ユニット (IMU) センサ出⼒ 出⼒レート CF 出⼒: 1 Hz to 500 Hz
加速度計 ジャイロスコープ 磁⼒計 動作パラメータ
計測レンジ ±8 g (標準) 300°/sec (標準) ±2.5 Gauss 通信 USB 2.0 (フルスピード)
±2 g、±4 g、±20 g, ±75、±150, RS232 (9,600bps to 921,600bps、デフォルト 115,200)
±40 g (オプション) ±900 °/sec (オプション) 電源 +4 to + 36 V dc
ノンリニアリティ ±0.02 % fs ±0.02 % fs ±0.3 % fs 電⼒消費 500 mW (typ)
分解能 <0.1 mg <0.003°/sec ― 動作温度 -40 °C to +85 °C
バイアス安定性 ±0.04 mg 8°/hr ― 機械的衝撃限度 500 g (キャリブレーションには影響なし)
慣性バイアスエラー ±0.002 g ±0.04°/sec ±0.003 Gauss 1000 g (バイアスが変わる可能性)、
スケールファクタ安定性 ±0.03% ±0.05% ±0.1% 5000 g (耐性)
ノイズ密度 25 µg/√Hz (2 g) 0.005°/sec/√Hz 100 µGauss/√Hz 平均故障間隔 (未定)
(300 dps) 物理的仕様
アライメント誤差 ±0.05° ±0.05° ±0.05° サイズ 36.0 mm x 36.6 mm x 11.1 mm
調整可能帯域 225 Hz (max) 250 Hz (max) ― 重量 16.5 グラム
温度範囲内オフセットエラー 0.06% (typ) 0.04% (typ) ― 筐体材料 アルミニウム
温度範囲内ゲインエラー 0.03% (typ) 0.03% (typ) ― 規格適合 ROHS、CE
スケールファクタ 0.02% (typ) 0.02% (typ) ±0.0015 インテグレーション
ノンリニアリティ(@ 25° C) 0.06% (max) 0.06% (max) Gauss コネクタ データ/電源 出⼒: マイクロ-DB9
振動による誘導ノイズ ― 0.072°/s RMS/g RMS ― GNSSアンテナ: MMCX type
振動による整流誤差(VRE) ― 0.001°/s/g2 RMS ― ソフトウェア MIP Monitor、Windows XP/Vista/7/8/10 互換
IMUフィルタリング sigma-delta 広帯域デジタル・アンチエイリアシング・フィルタからデジタル平均化フィルタ 互換性 プロトコル互換︓ 3DM-GX3、GX4、RQ1、GQ1、GX5
(ユーザー調整可)物理単位にスケーリング、1 kHz コーニング&スカリング演算 ソフトウェア開発 MIP データコミュニケーション・プロトコル、
サンプリングレート 1 kHz 4 kHz 50 Hz キット(SDK) サンプルコード (OS とプラットフォームによる)
IMUデータ 出⼒レート 1 Hz to 1 kHz
気圧⾼度計
レンジ -1800 m to 10,000 m
分解能 < 0.1 m 開発元︓
ノイズ密度 0.01 hPa RMS
サンプリングレート 25 Hz
製品の仕様は予告なく変更になる場合がございます。ご了承下さい
お問い合わせ先
株式会社 クレアクト・インターナショナル
〒141-0022 東京都品川区東五反⽥ 1-8-13 五反⽥増島ビル 4 階
TEL: 03-3444-5601 FAX︓ 03-3442-5402 メール: info@creact.co.jp www.creact.co.jp