


20 年以上の開発・生産経験を持つ米国LORD MicroStrain 社の慣性計測ユニット(IMU) 3DM シリーズに、OEM バージョンシリー
ズ(3DM-CV5)3 機種を新たにリリースしました。工業製品レベルの高い性能とお求めやすい価格を打ち出した画期的な製品です。
様々な姿勢計測やナビゲーション機能を有する製品開発に必須のIMU デバイスとして、世界で高い評価を獲得しています。
このカタログについて
| ドキュメント名 | LORD Microstrain社のIMU/3DM-CV5シリーズ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 550Kb |
| 取り扱い企業 | 株式会社クレアクト (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
LORD Microstrain社のIMU (OEM ver)
20 年以上の開発・生産経験を持つ米国 LORD MicroStrain 社の慣性計測ユニット(IMU) 3DM シリーズに、OEM バージョンシリー
ズ(3DM-CV5)3 機種を新たにリリースしました。工業製品レベルの高い性能とお求めやすい価格を打ち出した画期的な製品です。
様々な姿勢計測やナビゲーション機能を有する製品開発に必須の IMUデバイスとして、世界で高い評価を獲得しています。
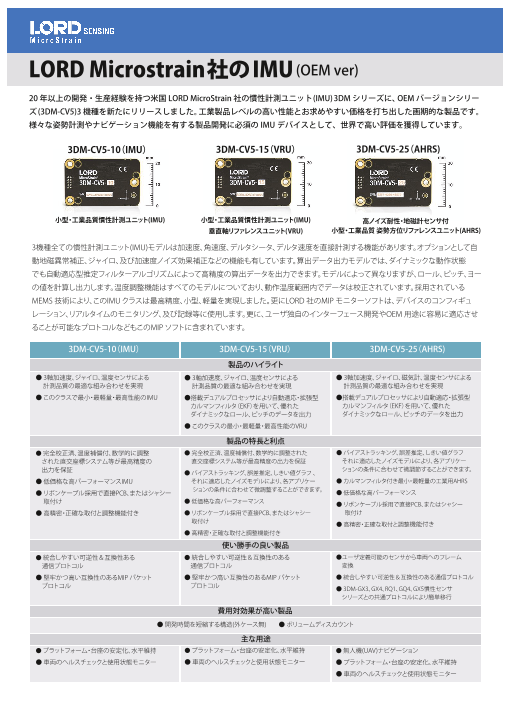
3DM-CV5-10(IMU) 3DM-CV5-15(VRU) 3DM-CV5-25(AHRS)
小型・工業品質慣性計測ユニット(IMU) 小型・工業品質慣性計測ユニット(IMU) 高ノイズ耐性・地磁計センサ付
垂直軸リファレンスユニット(VRU) 小型・工業品質 姿勢方位リファレンスユニット(AHRS)
3機種全ての慣性計測ユニット(IMU)モデルは加速度、角速度、デルタシータ、デルタ速度を直接計測する機能があります。オプションとして自
動地磁異常補正、ジャイロ、及び加速度ノイズ効果補正などの機能も有しています。算出データ出力モデルでは、ダイナミックな動作状態
でも自動適応型推定フィルターアルゴリズムによって高精度の算出データを出力できます。モデルによって異なりますが、ロール、ピッチ、ヨー
の値を計算し出力します。温度調整機能はすべてのモデルについており、動作温度範囲内でデータは校正されています。採用されている
MEMS 技術により、このIMU クラスは最高精度、小型、軽量を実現しました。更にLORD 社のMIP モニターソフトは、デバイスのコンフィギュ
レーション、リアルタイムのモニタリング、及び記録等に使用します。更に、ユーザ独自のインターフェース開発やOEM 用途に容易に適応させ
ることが可能なプロトコルなどもこのMIP ソフトに含まれています。
3DM-CV5-10(IMU) 3DM-CV5-15(VRU) 3DM-CV5-25(AHRS)
製品のハイライト
● 3軸加速度、ジャイロ、温度センサによる ● 3軸加速度、ジャイロ、温度センサによる ● 3軸加速度、ジャイロ、磁気計、温度センサによる
計測品質の最適な組み合わせを実現 計測品質の最適な組み合わせを実現 計測品質の最適な組み合わせを実現
● このクラスで最小・最軽量・最高性能のIMU ●搭載デュアルプロセッサにより自動適応・拡張型 ●搭載デュアルプロセッサにより自動適応・拡張型
カルマンフィルタ(EKF)を用いて、優れた カルマンフィルタ(EKF)を用いて、優れた
ダイナミックなロール、ピッチのデータを出力 ダイナミックなロール、ピッチのデータを出力
● このクラスの最小・最軽量・最高性能のVRU
製品の特長と利点
● 完全校正済、温度補償付、数学的に調整 ● 完全校正済、温度補償付、数学的に調整された ● バイアストラッキング、誤差推定、しきい値グラフ
された直交座標システム等が最高精度の 直交座標システム等が最高精度の出力を保証 それに適応したノイズモデルにより、各アプリケー
出力を保証 ● バイアストラッキング、誤差推定、しきい値グラフ 、 ションの条件に合わせて微調節することができます。
● 低価格な高パーフォーマンスIMU それに適応したノイズモデルにより、各アプリケー ● カルマンフィルタ付き最小・最軽量の工業用AHRS
● リボンケーブル採用で直接PCB、またはシャシー ションの条件に合わせて微調整することができます。 ● 低価格な高パーフォーマンス
取付け ● 低価格な高パーフォーマンス ● リボンケーブル採用で直接PCB、またはシャシー
● 高精密・正確な取付と調整機能付き ● リボンケーブル採用で直接PCB、またはシャシー 取付け
取付け ● 高精密・正確な取付と調整機能付き
● 高精密・正確な取付と調整機能付き
使い勝手の良い製品
● 統合しやすい可逆性&互換性ある ● 統合しやすい可逆性&互換性のある ●ユーザ定義可能のセンサから車両へのフレーム
通信プロトコル 通信プロトコル 変換
● 堅牢かつ高い互換性のあるMIP パケット ● 堅牢かつ高い互換性のあるMIP パケット ● 統合しやすい可逆性&互換性のある通信プロトコル
プロトコル プロトコル ● 3DM-GX3、GX4、RQ1、GQ4、GX5慣性センサ
シリーズとの共通プロトコルにより簡単移行
費用対効果が高い製品
● 開発時間を短縮する構造(外ケース無) ● ボリュームディスカウント
主な用途
● プラットフォーム・台座の安定化、水平維持 ● プラットフォーム・台座の安定化、水平維持 ● 無人機(UAV)ナビゲーション
● 車両のヘルスチェックと使用状態モニター ● 車両のヘルスチェックと使用状態モニター ● プラットフォーム・台座の安定化、水平維持
● 車両のヘルスチェックと使用状態モニター
Page2
一般仕様書
3DM-CV5-10(IMU) 3DM-CV5-15(VRU) 3DM-CV5-25(AHRS)
内蔵センサ 3軸加速度計、3軸ジャイロ、温度センサ 3軸加速度計、3 軸ジャイロ、温度センサ、気圧高度計 3軸加速度計、3 軸ジャイロ、磁気センサ、温度センサ、気圧高度計
出力データ IMU 出力 IMU 出力 IMU 出力
第一段階では、1Hzサンプリングで、 加速度、角速度、気圧デルタシータ、デルタ速度 加速度、角速度、磁場、気圧、
シグマデルタアナログからデジタルに変換。 デルタシータ、デルタ速度
第二段階では、ユーザ調節可能な 算出出力データ
デジタルローパスフィルタ。 拡張カルマンフィルタ(EKF): 算出出力データ
フィルタ状態、推定姿勢(オイラー角、四元数、方位マトリ 拡張カルマンフィルタ(EKF):
ックス)、バイアス補正角速度圧力高度、無重力線加速度、 フィルタ状態、タイムスタンプ
姿勢不確かさ、ジャイロバイアス、加速度バイアススケー
ルファクタと不確かさ、重力モデルなど 推定姿勢:オイラー角、四元数、方位マトリックス、直線補正加速度
補正フィルタ: バイアス補正角速度圧力高度、無重力線加速度、
推定姿勢(オイラー角、4 元数、方位マトリック) ジャイロ/加速度バイアス、スケールファクタ、重力、
GPS 相関タイムスタンプ 地磁気モデルなど
加速度計
測定範囲 ±8g(標準),±2g,4g(オプション) ±8g(標準),±2g,4g(オプション) ±8g(標準),±2g,±4g,±20g,±40g (オプション)
非直線性 ±0.04%fs ±0.04%fs ±0.04%fs
分解能 0.05mg(±8g) 0.05mg(±8g) 0.05mg(±8g)
バイアス安定性 ±0.08mg ±0.08mg ±0.04mg
初期バイアス誤差 ±0.004g ±0.004g ±0.004g
スケールファクター安定性 ±0.05% ±0.05% ±0.05%
ノイズ密度 100μg/√Hz 100μg/√Hz 100μg/√Hz
アライメント誤差 ±0.05° ±0.05° ±0.05°
帯域幅 225Hz 225Hz 500Hz
Off-Set 誤差 0.2%(typ) 0.2%(typ) 0.2%(typ)
利得誤差 ±0.05%(typ),± 0.2%(max) ±0.05%(typ), ±0.2%(max) ±0.05%(typ), ±0.2%(max)
スケールファクタ非線形性(@25℃) 0.04%(typ) 0.2%(max) -
サンプリング 1kHz 1kHz 1kHz
ジャイロスコープ技術仕様
測定範囲 ±500°/sec(標準) ±250°、±1000°/sec(オプション) ±500°/sec(標準) ±250°、±1000°/sec(オプション) ±500°/sec(標準) ±250°、±1000°/sec(オプション)
非直線性 ±0.06%fs ±0.06%fs ±0.06%fs
分解能 0.003°/sec (500dps) 0.003°/sec (500dps) <0.003°/sec (500dps)
バイアス安定性 8°/hr 8°/hr 8°/hr
初期バイアス誤差 0.1°/Sec 0.1°/Sec ±0.1°/Sec
スケールファクター安定性 ±0.05% ±0.05% ±0.05%
ノイズ密度 -- 0.0075°/sec√Hz (500°/sec) -
アライメント誤差 ±0.08° ±0.08° ±0.05°
帯域幅 500Hz 500Hz 500Hz
Off-Set 誤差 0.1%(typ) 0.1%(typ) 0.1%(typ)
利得誤差 ±0.1%(typ) ±0.4(max) ±0.1%(typ) ±0.4(max) ±0.06(typ)
スケールファクタ非線形性(@25℃) 0.04%(typ) 0.15%(max) -
サンプリング 1kHz 1kHz 1kHz
磁気センサ技術仕様
計測範囲 - - ±2.5 ガウス
非直線性 - - ±0.3%fs
初期バイアス誤差 - - ±0.003 ガウス
スケールファクター安定性 - - ±0.3%fs
ノイズ密度 - - 100 μガウス/√Hz
アライメント誤差 - - ±0.05°
スケールファクタ非線形性(@25℃) ±0.0015ガウス - -
サンプリング - - 50Hz
IMUフィルタリング
IMU フィルタ 第一段階では、1Hzサンプリングで、シグマデルタアナログからデジタルに変換。 デジタル平均フィルタ(ユーザー調節可能)のサンプリングは1KHz。
第二段階では、ユーザ調節可能なデジタルローパスフィルタ。 調節可能な物理量単位へ縮尺したデジタル平均フィルタから
デジタルシグマ・デルタ広帯域アンチエリアスフィルタ。
IMU データ出力レート 1Hz~1000Hz 1Hz~1000Hz (センサダイレクトモード)
気圧高度計
測定範囲 - -1800m~10,000m -1800m~10,000m
分解能 - <0.1m <0.1m
ノイズ密度 - 0.01hPaRMS 0.01hPaRMS
サンプリング - 25Hz 25Hz
算出された出力データ
姿勢精度 - EKF 出力:±0.5°RMS ロールとピッチ (typ) EKF 出力:±0.5°RMS ロールとピッチ (typ)±1°RMS ヘディング(typ)CF 出力:±0.8°RMS ロールとピッチ (typ) CF 出力:±0.8°RMS ロールとピッチ (Ttp)±2°RMS ヘディング(typ)
姿勢計測範囲 - 360°(3 軸) 360°(3 軸)
姿勢分解能 - 0.05° 0.05°
姿勢再現性 - 0.5° 0.5°
算出更新レート - 500Hz 500Hz
算出出力レート - EKF 出力: 1Hz~500Hz CF 出力: 1Hz ~1000Hz EKF 出力: 1Hz ~ 500Hz CF 出力: 1Hz ~1000Hz
動作仕様
通信 TTL シリアル USB2.0(フルスピード), TTL シリアル USB2.0(フルスピード), TTL シリアル
(3.0Vdc, 9,600bps~921,600bps、default 115,200) (30Vdc, 9,600bps~921,600bps、default 115,200) (30Vdc,9,600bps~921,600bps、default 115,200)
電源 +3.2~+5.2dc
消費電力 360mW (typ) 500mW (max) 360mW (typ) 500mW (max) 360mW (typ) 500mW (max)
動作温度 -40℃ ~+85℃
耐機械的衝撃 500g(キャリブレーション影響無) 1000g(バイアス影響有) 5000g(限界値) 500g
機械的仕様/その他
寸法 38mmx24mmx9.7mm
重量/ケース材 - 11 グラム アルミニウム -
規定 ROHS、CE
コネクター データ/電源出力 Samtec FTSH シリーズ (FTSH-105-01F-D-K)
ソフトウエア MIP モニター、WindowsXP/vista/7/8/10 互換性あり
互換性 3DM®-GX3、GX4、RQ1、GQ4、GX5とCV5製品シリーズ間のプロトコル互換性あり
ソフトウェア開発キット 使用可能なサンプルコードを使用したMIPデータ通信プロトコル(OSとプラットフォームに依存しない)
お問合せ先
株式会社クレアクト・インターナショナル
〒141-0022
東京都品川区東五反田1-8-13五反田増島ビル4階 tel:03-3444-5601 mail:info@creact.co.jp