


充実のラインアップで、最適なパレタイジングシステムを構築します。
◆ 高生産性
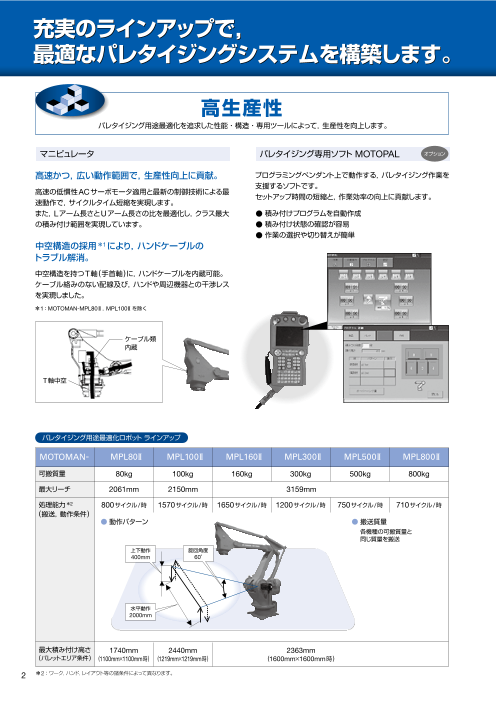
パレタイジング用途最適化を追求した性能・構造・専用ツールによって、生産性を向上します。
◆省スペース
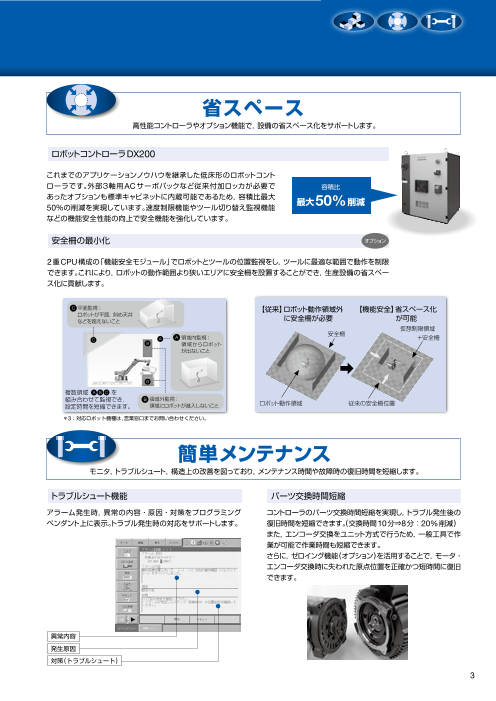
高性能コントローラやオプション機能で、設備の省スペース化をサポートします。
◆簡単メンテナンス
モニタ、トラブルシュート、構造上の改善を図っており、メンテナンス時間や故障時の復旧時間を短縮します。
◆詳細はカタログをダウンロードしご覧いただくか、お気軽にお問い合わせ下さい。
このカタログについて
| ドキュメント名 | パレタイジング用途最適化ロボット MOTOMAN-MPLシリーズ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 3.7Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社安川メカトレック (この企業の取り扱いカタログ一覧) |

このカタログの内容
Page1
MOTOMAN-MPLシリーズ
ロボットコントローラDX200 標準仕様 プログラミングペンダント 標準仕様
項 目 仕 様 項 目 仕 様 パレタイジング用途最適化ロボット
構 造 防じん構造 IP54 外 形 寸 法 169(幅)× 50(厚さ)× 314.5(高さ) mm
MPL80II : 600(幅)×520(奥行き)×730(高さ) mm* 概 略 質 量 0.990 kg
100 kg(外部3軸内蔵可) 材 質 強化プラスチック
外 形 寸 法, MPL100II , MPL160II , MPL300II , MPL500II
: 選択キー,軸操作キー,数値 /アプリケーション MOTOMAN-MPLシリーズ
600(幅)×640(奥行き)×730(高さ) mm* キー, キー付きモード切り替えスイッチ(ティーチ概 略 質 量
110 kg(外部3軸内蔵可) モード,プレイモード,リモートモード),非常停止
MPL800II : 600(幅)×520(奥行き)× 操 作 機 器1230(高さ) mm* ボタン,イネーブルスイッチ,コンパクトフラッ
160 kg(外部1軸内蔵可) シュカード I/F装備(コンパクトフラッシュはオ
冷 却 方 式 間接冷却 プション),USBポート(1ポート)装備
周 囲 温 度 通電時 : 0˚C ~ +45˚C,保管時 : −10˚C ~ +60˚C 5.7インチカラー LCD,タッチパネル640×480
相 対 湿 度 最大90%(結露のないこと) ディスプレイ ドット(漢字,ひらがな,カタカナ,英数字,
三相AC200 V(+10% ~ −15%)50/60 Hz(±2%) その他)
電 源 仕 様
三相AC220 V(+10% ~ -15%)60 Hz(±2%) 保 護 等 級 IP65
接 地 D種接地 標準 8 m
ケ ー ブ ル 長
専用信号 : 入力 28,出力 7 最大(オプション) : 36 m(延長ケーブル追加)
入 出 力 信 号 汎用信号 : 入力 40,出力 40
(トランジスタ出力 32,リレー出力 8)
位 置 制 御 方 式 シリアル通信方式(絶対値エンコーダ)
JOB : 200,000ステップ,10,000ロボット命令
メ モ リ 容 量
CIOラダー(最大) : 20,000ステップ
拡 張 ス ロット PCI : 2スロット
LAN(上位接続) 1個(10BASE-T/100BASE-TX)
シ リ ア ル I/F RS-232C : 1個
制 御 方 式 ソフトウェアサーボ
ドライブユニット ACサーボ用サーボパック
* : コントローラの外側に取付けた器具の寸法は含んでいません。
安全上の ・ご使用の前に取扱説明書とその他の付属書類などをすべて熟読し, 正しくご使用ください。
ご注意 ・本製品の故障や誤操作が直接人命を脅かしたり, 人体に危害を及ぼすおそれがある用途に使用する場合は, その都度検討が必要ですので当社営業窓口までご照会ください。
・本資料中の適用写真は, 分かりやすく説明するために安全さくなど法令法規などで定められた安全のための機器, 装置を取り除いて撮影しています。
また, イラストなどはイメージを表現したものです。
技術・アフターサービスに関するお問い合わせ(YASKAWAコンタクトセンタ) 製品・技術情報サイト e-メカサイト
TEL 0120-502-495 ●技術相談 ●資料請求 eメカ 検 索月~金(祝日及び当社休業日は除く)
0120-394-094 9:00~12:00,13:00~17:00 URL: http://www.e-mechatronics.com/FAX
●アフターサービス 安川電機製品の最新情報をご覧いただけます。
E-mail robotcc@yaskawa-eng.co.jp 24時間365日
製造・販売
株式会社 安川電機 URL: https://www.yaskawa.co.jp/
販売 品質及び環境マネジメントシステムの
東京支社 TEL( 03)5402-4525 FAX( 03)5402-4581 国際規格 ISO9001, ISO14001を取得
〒105-6891 東京都港区海岸1丁目16番1号 ニューピア竹芝サウスタワー 8階 しています。
中部支店 TEL( 0561)36-9324 FAX( 0561)36-9312
〒470-0217 愛知県みよし市根浦町2丁目3番1号
大阪支店 TEL( 06)6346-4535 FAX( 06)6346-4556
〒530-0003 大阪市北区堂島2丁目4番27号 新藤田ビル4階
九州支店 TEL( 092)714-5906 FAX( 092)761-5136 QMS Accreditation
〒810-0001 福岡市中央区天神1丁目6番8号 天神ツインビル14階 R009 JQA-0813 JQA-EM0202
◆各地区の営業所は e-メカサイト の「お問い合わせ」でご確認ください。
本製品の最終使用者が軍事関係であったり,用途が兵器などの製造用である場合には,
「外国為替及び外国貿易法」の定める輸出規制の対象となることがありますので,
輸出される際には十分な審査及び必要な輸出手続きをお取りください。
製品改良のため,定格,仕様,寸法などの一部を予告なしに変更することがあります。
© 2010 YASKAWA ELECTRIC CORPORATION
資料番号 KAJP C940560 01E <11>-0
Published in Japan 2019年 5月
R1-00-18-10
Page2
充実のラインアップで,
最適なパレタイジングシステムを構築します。
高生産性 省スペース
パレタイジング用途最適化を追求した性能・構造・専用ツールによって,生産性を向上します。 高性能コントローラやオプション機能で,設備の省スペース化をサポートします。
マニピュレータ パレタイジング専用ソフト MOTOPAL オプション ロボットコントローラDX200
高速かつ,広い動作範囲で,生産性向上に貢献。 プログラミングペンダント上で動作する,パレタイジング作業を これまでのアプリケーションノウハウを継承した低床形のロボットコント
支援するソフトです。 ローラです。外部3軸用ACサーボパックなど従来付加ロッカが必要で
高速の低慣性ACサーボモータ適用と最新の制御技術による最 容積比セットアップ時間の短縮と,作業効率の向上に貢献します。 あったオプションも標準キャビネットに内蔵可能であるため,容積比最大
速動作で,サイクルタイム短縮を実現します。
50%の削減を実現しています。速度制限機能やツール切り替え監視機能 最大50%削減
また,Lアーム長さとUアーム長さの比を最適化し,クラス最大 ● 積み付けプログラムを自動作成 などの機能安全性能の向上で安全機能を強化しています。
の積み付け範囲を実現しています。 ● 積み付け状態の確認が容易
● 作業の選択や切り替えが簡単
中空構造の採用 安全柵の最小化 オプション*1により,ハンドケーブルの
トラブル解消。 2重CPU構成の「機能安全モジュール」でロボットとツールの位置監視をし,ツールに最適な範囲で動作を制限
中空構造を持つT軸 (手首軸 )に,ハンドケーブルを内蔵可能。 できます。これにより,ロボットの動作範囲より狭いエリアに安全柵を設置することができ,生産設備の省スペー
ケーブル絡みのない配線及び,ハンドや周辺機器との干渉レス ス化に貢献します。
を実現しました。
*1 : MOTOMAN-MPL80 ,MPL100 を除く C 平面監視 : 【従来】ロボット動作領域外 【機能安全】省スペース化ロボットが平面,斜め天井
などを超えないこと に安全柵が必要 が可能
仮想制限領域
安全柵
ケーブル類 C A A 領域内監視 : +安全柵
B
内蔵 領域からロボットが出ないこと
T軸中空 B
複数領域 A B C を
組み合わせて監視でき, B 領域外監視 :
設定時間を短縮できます。 領域にロボットが進入しないこと ロボット動作領域 従来の安全柵位置
*3:対応ロボット機種は ,営業窓口までお問い合わせください。
パレタイジング用途最適化ロボット ラインアップ
MOTOMAN- MPL80 MPL100 MPL160 MPL300 MPL500 MPL800 簡単メンテナンス
可搬質量 80kg 100kg 160kg 300kg 500kg 800kg モニタ,トラブルシュート,構造上の改善を図っており,メンテナンス時間や故障時の復旧時間を短縮します。
最大リーチ 2061mm 2150mm 3159mm
トラブルシュート機能 パーツ交換時間短縮
処理能力*2 800サイクル /時 1570サイクル /時 1650サイクル /時 1200サイクル /時 750サイクル /時 710サイクル /時
(搬送,動作条件 ) アラーム発生時,異常の内容・原因・対策をプログラミング コントローラのパーツ交換時間短縮を実現し,トラブル発生後の
動作パターン 搬送質量 ペンダント上に表示。トラブル発生時の対応をサポートします。 復旧時間を短縮できます。(交換時間10分⇒8分 :20%削減 )
各機種の可搬質量と また,エンコーダ交換をユニット方式で行うため,一般工具で作
同じ質量を搬送
業が可能で作業時間も短縮できます。
上下動作 旋回角度
400mm 60˚ さらに,ゼロイング機能 (オプション)を活用することで,モータ・
エンコーダ交換時に失われた原点位置を正確かつ短時間に復旧
できます。
水平動作
2000mm
異常内容
最大積み付け高さ 1740mm 2440mm 2363mm 発生原因
(パレットエリア条件 ) (1100mm×1100mm時 ) (1219mm×1219mm時 ) (1600mm×1600mm時 ) 対策 (トラブルシュート )
2 *2 : ワーク, ハンド, レイアウト等の諸条件によって異なります。 3
Page3
充実のラインアップで,
最適なパレタイジングシステムを構築します。
高生産性 省スペース
パレタイジング用途最適化を追求した性能・構造・専用ツールによって,生産性を向上します。 高性能コントローラやオプション機能で,設備の省スペース化をサポートします。
マニピュレータ パレタイジング専用ソフト MOTOPAL オプション ロボットコントローラDX200
高速かつ,広い動作範囲で,生産性向上に貢献。 プログラミングペンダント上で動作する,パレタイジング作業を これまでのアプリケーションノウハウを継承した低床形のロボットコント
支援するソフトです。 ローラです。外部3軸用ACサーボパックなど従来付加ロッカが必要で
高速の低慣性ACサーボモータ適用と最新の制御技術による最 容積比セットアップ時間の短縮と,作業効率の向上に貢献します。 あったオプションも標準キャビネットに内蔵可能であるため,容積比最大
速動作で,サイクルタイム短縮を実現します。
50%の削減を実現しています。速度制限機能やツール切り替え監視機能 最大50%削減
また,Lアーム長さとUアーム長さの比を最適化し,クラス最大 ● 積み付けプログラムを自動作成 などの機能安全性能の向上で安全機能を強化しています。
の積み付け範囲を実現しています。 ● 積み付け状態の確認が容易
● 作業の選択や切り替えが簡単
中空構造の採用 安全柵の最小化 オプション*1により,ハンドケーブルの
トラブル解消。 2重CPU構成の「機能安全モジュール」でロボットとツールの位置監視をし,ツールに最適な範囲で動作を制限
中空構造を持つT軸 (手首軸 )に,ハンドケーブルを内蔵可能。 できます。これにより,ロボットの動作範囲より狭いエリアに安全柵を設置することができ,生産設備の省スペー
ケーブル絡みのない配線及び,ハンドや周辺機器との干渉レス ス化に貢献します。
を実現しました。
*1 : MOTOMAN-MPL80 ,MPL100 を除く C 平面監視 : 【従来】ロボット動作領域外 【機能安全】省スペース化ロボットが平面,斜め天井
などを超えないこと に安全柵が必要 が可能
仮想制限領域
安全柵
ケーブル類 C A A 領域内監視 : +安全柵
B
内蔵 領域からロボットが出ないこと
T軸中空 B
複数領域 A B C を
組み合わせて監視でき, B 領域外監視 :
設定時間を短縮できます。 領域にロボットが進入しないこと ロボット動作領域 従来の安全柵位置
*3:対応ロボット機種は ,営業窓口までお問い合わせください。
パレタイジング用途最適化ロボット ラインアップ
MOTOMAN- MPL80 MPL100 MPL160 MPL300 MPL500 MPL800 簡単メンテナンス
可搬質量 80kg 100kg 160kg 300kg 500kg 800kg モニタ,トラブルシュート,構造上の改善を図っており,メンテナンス時間や故障時の復旧時間を短縮します。
最大リーチ 2061mm 2150mm 3159mm
トラブルシュート機能 パーツ交換時間短縮
処理能力*2 800サイクル /時 1570サイクル /時 1650サイクル /時 1200サイクル /時 750サイクル /時 710サイクル /時
(搬送,動作条件 ) アラーム発生時,異常の内容・原因・対策をプログラミング コントローラのパーツ交換時間短縮を実現し,トラブル発生後の
動作パターン 搬送質量 ペンダント上に表示。トラブル発生時の対応をサポートします。 復旧時間を短縮できます。(交換時間10分⇒8分 :20%削減 )
各機種の可搬質量と また,エンコーダ交換をユニット方式で行うため,一般工具で作
同じ質量を搬送
業が可能で作業時間も短縮できます。
上下動作 旋回角度
400mm 60˚ さらに,ゼロイング機能 (オプション)を活用することで,モータ・
エンコーダ交換時に失われた原点位置を正確かつ短時間に復旧
できます。
水平動作
2000mm
異常内容
最大積み付け高さ 1740mm 2440mm 2363mm 発生原因
(パレットエリア条件 ) (1100mm×1100mm時 ) (1219mm×1219mm時 ) (1600mm×1600mm時 ) 対策 (トラブルシュート )
2 *2 : ワーク, ハンド, レイアウト等の諸条件によって異なります。 3
Page4
MOTOMAN-MPL80 MOTOMAN-MPL100
可搬質量 80kg,最大リーチ R2061mm 可搬質量 100kg,最大リーチ R2150mm
外形寸法及び動作範囲 単位 : mm : P点動作範囲 外形寸法及び動作範囲 単位 : mm : T点動作範囲
344 92 4×M8タップ
16 60 深さ : 14
255 40 2×M5タップ
深さ : 9
4×M8タップ×P1.25 2×ϕ 10H7(深さ : 8)
R54
3 深さ : 16 * 8
2×ϕ 9H7(深さ : 8)
ϕ 6H7
6 深さ : 10 ϕ 92
0
ϕ 8 ϕ125
8
R2
2×M6タップ 150
T軸合いマーク 深さ : 11 :
611.5 200 6×M10(深さ 14)
:
8 × タップ 深さフィールドバスケーブル用 4 M8 14
R2702
フィールドバスケーブル用チューブ R
3
2 0˚ 6×M10(深さ : 14)06 ϕ 8H7 6×M8×P1.25
(内径 ϕ 1)(配線結束チューブ内) チューブ(内径ϕ 12()配線結束チューブ内) 4×M6タップ 深さ:11 12 エア供給口 深さ : 14 深さ : 14
PT3/8タップ 矢視A
カバープラグ付き 矢視 A
装備ケーブルコネクタ
JL05-2A24-28SC(キャップ付き)
5 21705゚ 相手側コネクタ JL05-6A24-28Pを
2817
エア入口 エア入口Rc3/8145 1025 ご準備ください。 フィールドバスケーブル用 カバープラグ付きPT3/8タップ
チューブ(内径 ϕ ) 325 1225 12 カバープラグ付き (276)344
(ベース内)
2223 220
2242 ケーブル処理用
U B フランジ
P点 U B
T 1300 装備ケーブルコネクタ(ベース側)
点 JL05-2A24-28PC
(キャップ付き )
A T
0˚ 343 253 装備ケーブルコネクタ
P点
0° 相手側コネクタ6 JL05-6A24-28S を9 JL05-2A24-28PC(キャップ付き) 7 T
15°15°
6 * ご準備ください。925 相手側コネクタ ° JL05-6A24-28Sを A
L Lご準備ください。 矢視B
矢視 B
フィールドバスケーブル用
チューブ(内径 ϕ 12) 957
4×M12×P1.75 312 8×ϕ1 225 ˚ (配線結束チューブ内)˚ ϕ15 450 290 8× 22深さ :B 20 234 234 2×ϕ 12H7 S 598
0 195±
ϕ
0.1 500 2× 20H7
105 105 77.5° 407 420
B 9
C
S 114
160˚ フィールドバスケーブル用 C 332 276 430
623 チューブ(内径 ϕ 12)
(ベース内)
8 2305° 400
195±0.1 230±0.1
131 1121 :ハッチング部動作範囲は可搬質量70kg
6 248 471 543 2061 153 455 * (ケーブル処理用フランジ含む )以下の場合に 230±0.1 230±0.1
0 608 有効です。 295±0.1
2192
矢視 C 矢視C
マニピュレータ標準仕様 マニピュレータ標準仕様
名 称 MOTOMAN-MPL80II B 軸 (手首振り ) 78.4 Nm 名 称 MOTOMAN-MPL100II B 軸 (手首振り ) 196 N・m許容モーメント 許容モーメント
形 式 YR-MPL0080-J00 T 軸 (手首回転 ) 20.5 Nm 形 式 YR-MPL0100-J00 T 軸 (手首回転 ) 0 N・m
構 造 垂直多関節形 (5自由度 ) 許容慣性モーメント B 軸 (手首振り ) 16 kgm2 構 造 垂直多関節形 (5自由度 ) 許容慣性モーメント B 軸 (手首振り ) 90 kgm2 (88 kgm2) *3
可 搬 質 量 80 kg (GD2/4) T 軸 (手首回転 ) 6.1 kgm2 可 搬 質 量 115 kg (100 kg)*3 (GD2/4) T 軸 (手首回転 ) 55 kgm2
繰 り 返 し 位 置 決 め 精 度 *1 ±0.07 mm 本 体 質 量 550 kg 繰 り 返 し 位 置 決 め 精 度 *1 ±0.2 mm 本 体 質 量 950 kg
S 軸 ( 旋 回 ) −180˚~+180˚ 温 度 0˚C~+45˚C S 軸 ( 旋 回 ) −180˚~+180˚ 温 度 0˚C~+45˚C
L 軸 ( 下 腕 ) −90˚ ~+135˚ 湿 度 20%~80%RH (結露のないこと ) L 軸 ( 下 腕 ) −60˚ ~+76˚ 湿 度 20%~80%RH (結露のないこと )
動 作 範 囲 U 軸 ( 上 腕 ) −160˚~+35˚ 振 動 4.9 m/s2以下 動 作 範 囲 U 軸 ( 上 腕 ) −147˚~+40˚ 振 動 4.9 m/s2以下
− 設 置 環 境 設 置 環 境B 軸 (手 首 振 り ) 15˚ ~ +15˚ *3 引火性及び腐食性ガス液体がないこと B 軸 (手 首 上 下 ) −15˚ ~+15˚*4 引火性及び腐食性ガス液体がないこと
T 軸 (手 首 回 転 ) −360˚~+360˚ そ の 他 水,油,粉じんなどがかからないこと T 軸 (手 首 回 転 ) −360˚~+360˚ (−210˚~+210˚)*3 そ の 他 水,油,粉じんなどがかからないこと
S 軸 ( 旋 回 ) 2.97 rad/s, 170˚/s 電気的ノイズ源が近くにないこと S 軸 ( 旋 回 ) 2.18 rad/s, 125˚/s 電気的ノイズ源が近くにないこと
L 軸 ( 下 腕 ) 2.97 rad/s, 170˚/s 電 源 容 量 *2 4.0 kVA L 軸 ( 下 腕 ) 1.53 rad/s, 88˚/s 電 源 容 量 *2 8.0 kVA
最 大 速 度 U 軸 ( 上 腕 ) 2.97 rad/s, 170˚/s *1 : JIS B 8432に準拠しています。 最 大 速 度 U 軸
( 上 腕 ) 2.18 rad/s, 125˚/s 1 : JIS B 8432に準拠しています。
B 軸 (手 首 振 り ) 2.97 rad/s, 170˚/s *2 :用途,動作パターンにより異なります。 B 軸 (手 首 上 下 ) 3.05 rad/s, 175˚/s *2 :用途,動作パターンにより異なります。
T 軸 (手 首 回 転 ) 6.11 rad/s, 350 *˚/s *3 : B軸動作範囲は大地に対する角度です。ただし,上腕との相対角により T 軸 (手 首 回 転 ) 4.63 rad/s, 265˚/s *3 :( ) 内の数値は,手首先端にケーブル処理用フランジが取付く場合の値です。動作が制限される姿勢があります。 *4 : B軸動作範囲は大地に対する角度です。ただし,上腕との相対角により動作が制限され
(注 )本表はSI単位系で記載しています。 る姿勢があります。
(注 )本表はSI単位系で記載しています。
4 5
1807
540 870 210 187
40 223.5
65˚
57 50
50
175
3291
455
195±0.1 385 230±0.1 ϕ 50H7
320 ϕ100h6
280
40 42
195±0.1
4°
75
562
577 240
709 120
713
762
27.5
1441 12.5 45
2150
2702
650 1150 300 153
2253
500
420
ϕ
320 63H7
ϕ160h6
185±0.1 185±0.1
250±0.1
19°
713R
7 70°
R57
35˚1
Page5
MOTOMAN-MPL80 MOTOMAN-MPL100
可搬質量 80kg,最大リーチ R2061mm 可搬質量 100kg,最大リーチ R2150mm
外形寸法及び動作範囲 単位 : mm : P点動作範囲 外形寸法及び動作範囲 単位 : mm : T点動作範囲
344 92 4×M8タップ
16 60 深さ : 14
255 40 2×M5タップ
深さ : 9
4×M8タップ×P1.25 2×ϕ 10H7(深さ : 8)
R54
3 深さ : 16 * 8
2×ϕ 9H7(深さ : 8)
ϕ 6H7
6 深さ : 10 ϕ 92
0
ϕ 8 ϕ125
8
R2
2×M6タップ 150
T軸合いマーク 深さ : 11 :
611.5 200 6×M10(深さ 14)
:
8 × タップ 深さフィールドバスケーブル用 4 M8 14
R2702
フィールドバスケーブル用チューブ R
3
2 0˚ 6×M10(深さ : 14)06 ϕ 8H7 6×M8×P1.25
(内径 ϕ 1)(配線結束チューブ内) チューブ(内径ϕ 12()配線結束チューブ内) 4×M6タップ 深さ:11 12 エア供給口 深さ : 14 深さ : 14
PT3/8タップ 矢視A
カバープラグ付き 矢視 A
装備ケーブルコネクタ
JL05-2A24-28SC(キャップ付き)
5 21705゚ 相手側コネクタ JL05-6A24-28Pを
2817
エア入口 エア入口Rc3/8145 1025 ご準備ください。 フィールドバスケーブル用 カバープラグ付きPT3/8タップ
チューブ(内径 ϕ ) 325 1225 12 カバープラグ付き (276)344
(ベース内)
2223 220
2242 ケーブル処理用
U B フランジ
P点 U B
T 1300 装備ケーブルコネクタ(ベース側)
点 JL05-2A24-28PC
(キャップ付き )
A T
0˚ 343 253 装備ケーブルコネクタ
P点
0° 相手側コネクタ6 JL05-6A24-28S を9 JL05-2A24-28PC(キャップ付き) 7 T
15°15°
6 * ご準備ください。925 相手側コネクタ ° JL05-6A24-28Sを A
L Lご準備ください。 矢視B
矢視 B
フィールドバスケーブル用
チューブ(内径 ϕ 12) 957
4×M12×P1.75 312 8×ϕ1 225 ˚ (配線結束チューブ内)˚ ϕ15 450 290 8× 22深さ :B 20 234 234 2×ϕ 12H7 S 598
0 195±
ϕ
0.1 500 2× 20H7
105 105 77.5° 407 420
B 9
C
S 114
160˚ フィールドバスケーブル用 C 332 276 430
623 チューブ(内径 ϕ 12)
(ベース内)
8 2305° 400
195±0.1 230±0.1
131 1121 :ハッチング部動作範囲は可搬質量70kg
6 248 471 543 2061 153 455 * (ケーブル処理用フランジ含む )以下の場合に 230±0.1 230±0.1
0 608 有効です。 295±0.1
2192
矢視 C 矢視C
マニピュレータ標準仕様 マニピュレータ標準仕様
名 称 MOTOMAN-MPL80II B 軸 (手首振り ) 78.4 Nm 名 称 MOTOMAN-MPL100II B 軸 (手首振り ) 196 N・m許容モーメント 許容モーメント
形 式 YR-MPL0080-J00 T 軸 (手首回転 ) 20.5 Nm 形 式 YR-MPL0100-J00 T 軸 (手首回転 ) 0 N・m
構 造 垂直多関節形 (5自由度 ) 許容慣性モーメント B 軸 (手首振り ) 16 kgm2 構 造 垂直多関節形 (5自由度 ) 許容慣性モーメント B 軸 (手首振り ) 90 kgm2 (88 kgm2) *3
可 搬 質 量 80 kg (GD2/4) T 軸 (手首回転 ) 6.1 kgm2 可 搬 質 量 115 kg (100 kg)*3 (GD2/4) T 軸 (手首回転 ) 55 kgm2
繰 り 返 し 位 置 決 め 精 度 *1 ±0.07 mm 本 体 質 量 550 kg 繰 り 返 し 位 置 決 め 精 度 *1 ±0.2 mm 本 体 質 量 950 kg
S 軸 ( 旋 回 ) −180˚~+180˚ 温 度 0˚C~+45˚C S 軸 ( 旋 回 ) −180˚~+180˚ 温 度 0˚C~+45˚C
L 軸 ( 下 腕 ) −90˚ ~+135˚ 湿 度 20%~80%RH (結露のないこと ) L 軸 ( 下 腕 ) −60˚ ~+76˚ 湿 度 20%~80%RH (結露のないこと )
動 作 範 囲 U 軸 ( 上 腕 ) −160˚~+35˚ 振 動 4.9 m/s2以下 動 作 範 囲 U 軸 ( 上 腕 ) −147˚~+40˚ 振 動 4.9 m/s2以下
− 設 置 環 境 設 置 環 境B 軸 (手 首 振 り ) 15˚ ~ +15˚ *3 引火性及び腐食性ガス液体がないこと B 軸 (手 首 上 下 ) −15˚ ~+15˚*4 引火性及び腐食性ガス液体がないこと
T 軸 (手 首 回 転 ) −360˚~+360˚ そ の 他 水,油,粉じんなどがかからないこと T 軸 (手 首 回 転 ) −360˚~+360˚ (−210˚~+210˚)*3 そ の 他 水,油,粉じんなどがかからないこと
S 軸 ( 旋 回 ) 2.97 rad/s, 170˚/s 電気的ノイズ源が近くにないこと S 軸 ( 旋 回 ) 2.18 rad/s, 125˚/s 電気的ノイズ源が近くにないこと
L 軸 ( 下 腕 ) 2.97 rad/s, 170˚/s 電 源 容 量 *2 4.0 kVA L 軸 ( 下 腕 ) 1.53 rad/s, 88˚/s 電 源 容 量 *2 8.0 kVA
最 大 速 度 U 軸 ( 上 腕 ) 2.97 rad/s, 170˚/s *1 : JIS B 8432に準拠しています。 最 大 速 度 U 軸
( 上 腕 ) 2.18 rad/s, 125˚/s 1 : JIS B 8432に準拠しています。
B 軸 (手 首 振 り ) 2.97 rad/s, 170˚/s *2 :用途,動作パターンにより異なります。 B 軸 (手 首 上 下 ) 3.05 rad/s, 175˚/s *2 :用途,動作パターンにより異なります。
T 軸 (手 首 回 転 ) 6.11 rad/s, 350 *˚/s *3 : B軸動作範囲は大地に対する角度です。ただし,上腕との相対角により T 軸 (手 首 回 転 ) 4.63 rad/s, 265˚/s *3 :( ) 内の数値は,手首先端にケーブル処理用フランジが取付く場合の値です。動作が制限される姿勢があります。 *4 : B軸動作範囲は大地に対する角度です。ただし,上腕との相対角により動作が制限され
(注 )本表はSI単位系で記載しています。 る姿勢があります。
(注 )本表はSI単位系で記載しています。
4 5
1807
540 870 210 187
40 223.5
65˚
57 50
50
175
3291
455
195±0.1 385 230±0.1 ϕ 50H7
320 ϕ100h6
280
40 42
195±0.1
4°
75
562
577 240
709 120
713
762
27.5
1441 12.5 45
2150
2702
650 1150 300 153
2253
500
420
ϕ
320 63H7
ϕ160h6
185±0.1 185±0.1
250±0.1
19°
713R
7 70°
R57
35˚1
Page6
MOTOMAN-MPL160 MOTOMAN-MPL300
可搬質量 160kg,最大リーチ R3159mm 可搬質量 300kg,最大リーチ R3159mm
外形寸法及び動作範囲 単位 : mm : T点動作範囲 外形寸法及び動作範囲 単位 : mm : T点動作範囲
1300 1300
ϕ 63H7 ϕ
ϕ 63H7160h6
5 ϕ160h6 5
ϕ 1
2
ϕ12
R10 R R37 315
1
9 03 R7 3159
2× ϕ 10H7 10×M10
深さ : 8 深さ : 16
10×M10 2×ϕ10H7
1600 深さ : 16 1600 深さ : 8
矢視 A 矢視 A
2776 フィールドバスケーブル用 フィールドバスケーブル用
614 2162 チューブ( 内径 ϕ12)(ベース内) チューブ(内径 ϕ 12)(ベース内)2776
270 1400 250
R1124 A B C D E エア入口 614 2162 A B C D E エア入口
U (A,B,C,D,E) 270 1400 250 (A,B,C,D,E)
5×Rc3/8タップ R1124 5×Rc3/8タップ
カバープラグ付き U カバープラグ付き
2204
2204
45˚ 装備ケーブルコネクタ(ベース側) 装備ケーブルコネクタ(ベース側)P点 T JL05-2A24-28PC(キャップ付き) JL05-2A24-28PC(キャップ付き)
L 相手側コネクタ - - を 相手側コネクタ -
点 1241 JL05 6A24 28S 45˚ T点 JL05 6A24
-28S
T
A 625 616 ご準備ください。 P点
T
L をご準備ください。1241
矢視 625 616 B A 矢視 B
L
640
640
˚ 540
540
120 220±0.1 220±0.1 220±0.1 220±0.1B
2×ϕ 20H7 8×ϕ 22 20°
2×ϕ 20H7 8×ϕ 22
0 1
B
C S 0
S
C
820
320±0.1 ϕ12H7 320±0.1 ϕ
0 1037 3159 360±
12H7
0.1 820
360±0.1
0 1037 3159
矢視 C 矢視 C
マニピュレータ標準仕様 マニピュレータ標準仕様
名 称 MOTOMAN-MPL160 許容慣性モーメント 名 称 MOTOMAN-MPL300 許容慣性モーメント
T 軸 (手首回転 ) 80 kgm2 T 軸 (手首回転 ) 140 kgm2
形 式 YR-MPL0160-J00 (GD2/4) 形 式 YR-MPL0300-J00 (GD2/4)
構 造 垂直多関節形 (4自由度 ) 本 体 質 量 1700 kg 構 造 垂直多関節形 (4自由度 ) 本 体 質 量 1820 kg
可 搬 質 量 160 kg 温 度 0˚C~+45˚C 可 搬 質 量 300 kg 温 度 0˚C~+45˚C
繰 り 返 し 位 置 決 め 精 度 *1 ±0.5 mm 湿 度 20%~80%RH (結露のないこと ) 繰 り 返 し 位 置 決 め 精 度 *1 ±0.5 mm 湿 度 20%~80%RH (結露のないこと )
S 軸 ( 旋 回 ) −180˚~+180˚ 振 動 4.9 m/s2以下 S 軸 ( 旋 回 ) −180˚~+180˚ 振 動 4.9 m/s2以下
設 置 環 境 設 置 環 境
L 軸 ( 下 腕 ) −45˚ ~+90˚ 引火性及び腐食性ガス液体がないこと L 軸 ( 下 腕 ) −動 作 範 囲 45˚ ~+90˚ 引火性及び腐食性ガス液体がないこと動 作 範 囲
U 軸 ( 上 腕 ) −120˚~+15.5˚ そ の 他 水,油,粉じんなどがかからないこと U 軸 ( 上 腕 ) −120˚~+15.5˚ そ の 他 水,油,粉じんなどがかからないこと
T 軸 (手 首 回 転 ) −360˚~+360˚ 電気的ノイズ源が近くにないこと T 軸 (手 首 回 転 ) −360˚~+360˚ 電気的ノイズ源が近くにないこと
S 軸 ( 旋 回 ) 2.44 rad/s, 140˚/s 電 源 容 量 *2 8.0 kVA S 軸 ( 旋 回 ) 1.57 rad/s, 90˚/s 電 源 容 量 *2 8.0 kVA
L 軸 ( 下 腕 ) 2.44 rad/s, 140˚/s
最 大 速 度 *1 : JIS B 8432に準拠しています。 L 軸
(
最 大 速 度 下 腕
) 1.75 rad/s, 100˚/s 1 : JIS B 8432に準拠しています。
U 軸 ( 上 腕 ) 2.44 rad/s, 140˚/s *2 :用途,動作パターンにより異なります。 U 軸 ( 上 腕 ) 1.92 rad/s, 110˚/s
*2 :用途,動作パターンにより異なります。
T 軸 (手 首 回 転 ) 5.32 rad/s, 305˚/s (注 )本表はSI単位系で記載しています。 T 軸 (手 首 回 転 ) 3.40
*
rad/s, 195˚/s (注 )本表はSI単位系で記載しています。
6 7
2529
880 1250
300
2363 1300
1600
2624
640
540
18
8
320±0.1 300±0.1
360±0.1
2529
880 1250
300
2363 1300
1600
2624
640
540
18
320±0.1 300±0.1
360±0.1 8
30˚
5°5.1
˚
90
R697
30˚
.5˚
15
0˚9
R697
Page7
MOTOMAN-MPL160 MOTOMAN-MPL300
可搬質量 160kg,最大リーチ R3159mm 可搬質量 300kg,最大リーチ R3159mm
外形寸法及び動作範囲 単位 : mm : T点動作範囲 外形寸法及び動作範囲 単位 : mm : T点動作範囲
1300 1300
ϕ 63H7 ϕ
ϕ 63H7160h6
5 ϕ160h6 5
ϕ 1
2
ϕ12
R10 R R37 315
1
9 03 R7 3159
2× ϕ 10H7 10×M10
深さ : 8 深さ : 16
10×M10 2×ϕ10H7
1600 深さ : 16 1600 深さ : 8
矢視 A 矢視 A
2776 フィールドバスケーブル用 フィールドバスケーブル用
614 2162 チューブ( 内径 ϕ12)(ベース内) チューブ(内径 ϕ 12)(ベース内)2776
270 1400 250
R1124 A B C D E エア入口 614 2162 A B C D E エア入口
U (A,B,C,D,E) 270 1400 250 (A,B,C,D,E)
5×Rc3/8タップ R1124 5×Rc3/8タップ
カバープラグ付き U カバープラグ付き
2204
2204
45˚ 装備ケーブルコネクタ(ベース側) 装備ケーブルコネクタ(ベース側)P点 T JL05-2A24-28PC(キャップ付き) JL05-2A24-28PC(キャップ付き)
L 相手側コネクタ - - を 相手側コネクタ -
点 1241 JL05 6A24 28S 45˚ T点 JL05 6A24
-28S
T
A 625 616 ご準備ください。 P点
T
L をご準備ください。1241
矢視 625 616 B A 矢視 B
L
640
640
˚ 540
540
120 220±0.1 220±0.1 220±0.1 220±0.1B
2×ϕ 20H7 8×ϕ 22 20°
2×ϕ 20H7 8×ϕ 22
0 1
B
C S 0
S
C
820
320±0.1 ϕ12H7 320±0.1 ϕ
0 1037 3159 360±
12H7
0.1 820
360±0.1
0 1037 3159
矢視 C 矢視 C
マニピュレータ標準仕様 マニピュレータ標準仕様
名 称 MOTOMAN-MPL160 許容慣性モーメント 名 称 MOTOMAN-MPL300 許容慣性モーメント
T 軸 (手首回転 ) 80 kgm2 T 軸 (手首回転 ) 140 kgm2
形 式 YR-MPL0160-J00 (GD2/4) 形 式 YR-MPL0300-J00 (GD2/4)
構 造 垂直多関節形 (4自由度 ) 本 体 質 量 1700 kg 構 造 垂直多関節形 (4自由度 ) 本 体 質 量 1820 kg
可 搬 質 量 160 kg 温 度 0˚C~+45˚C 可 搬 質 量 300 kg 温 度 0˚C~+45˚C
繰 り 返 し 位 置 決 め 精 度 *1 ±0.5 mm 湿 度 20%~80%RH (結露のないこと ) 繰 り 返 し 位 置 決 め 精 度 *1 ±0.5 mm 湿 度 20%~80%RH (結露のないこと )
S 軸 ( 旋 回 ) −180˚~+180˚ 振 動 4.9 m/s2以下 S 軸 ( 旋 回 ) −180˚~+180˚ 振 動 4.9 m/s2以下
設 置 環 境 設 置 環 境
L 軸 ( 下 腕 ) −45˚ ~+90˚ 引火性及び腐食性ガス液体がないこと L 軸 ( 下 腕 ) −動 作 範 囲 45˚ ~+90˚ 引火性及び腐食性ガス液体がないこと動 作 範 囲
U 軸 ( 上 腕 ) −120˚~+15.5˚ そ の 他 水,油,粉じんなどがかからないこと U 軸 ( 上 腕 ) −120˚~+15.5˚ そ の 他 水,油,粉じんなどがかからないこと
T 軸 (手 首 回 転 ) −360˚~+360˚ 電気的ノイズ源が近くにないこと T 軸 (手 首 回 転 ) −360˚~+360˚ 電気的ノイズ源が近くにないこと
S 軸 ( 旋 回 ) 2.44 rad/s, 140˚/s 電 源 容 量 *2 8.0 kVA S 軸 ( 旋 回 ) 1.57 rad/s, 90˚/s 電 源 容 量 *2 8.0 kVA
L 軸 ( 下 腕 ) 2.44 rad/s, 140˚/s
最 大 速 度 *1 : JIS B 8432に準拠しています。 L 軸
(
最 大 速 度 下 腕
) 1.75 rad/s, 100˚/s 1 : JIS B 8432に準拠しています。
U 軸 ( 上 腕 ) 2.44 rad/s, 140˚/s *2 :用途,動作パターンにより異なります。 U 軸 ( 上 腕 ) 1.92 rad/s, 110˚/s
*2 :用途,動作パターンにより異なります。
T 軸 (手 首 回 転 ) 5.32 rad/s, 305˚/s (注 )本表はSI単位系で記載しています。 T 軸 (手 首 回 転 ) 3.40
*
rad/s, 195˚/s (注 )本表はSI単位系で記載しています。
6 7
2529
880 1250
300
2363 1300
1600
2624
640
540
18
8
320±0.1 300±0.1
360±0.1
2529
880 1250
300
2363 1300
1600
2624
640
540
18
320±0.1 300±0.1
360±0.1 8
30˚
5°5.1
˚
90
R697
30˚
.5˚
15
0˚9
R697
Page8
MOTOMAN-MPL500 MOTOMAN-MPL800
可搬質量 500kg,最大リーチ R3159mm 可搬質量 800kg,最大リーチ R3159mm
外形寸法及び動作範囲 単位 : mm : T点動作範囲 外形寸法及び動作範囲 単位 : mm : T点動作範囲
1600
1300 1300
73 ϕ ϕ7 100H7R 100H7
ϕ ϕ250h6 250h6
R3 R159 1037 R3159
12×M12 ϕ 12×M12
ϕ 深さ : : 18 深さ 18
ϕ
ϕ 10H7 10H7 深さ : 10
深さ : 10 1600
矢視 A 矢視 A
フィールドバスケーブル用
チューブ(内径 ϕ 12()ベース内) フィールドバスケーブル用
2781 チューブ(内径 ϕ 12()ベース内)2781 エア入口
614 2167 A B C D E (
614 2167
A,B,C,D,E) A B C D E
270 1400 250 5×Rc3/8タップ
270 1400 250 エア入口
R1124 カバープラグ付き R1124 (A,B,C,D,E)
5×Rc3/8タップ
U カバープラグ付きU
2204 2204
L 装備ケーブルコネクタ(ベース側) 装備ケーブルコネクタ(ベース側)
JL05-2A24-28PC(キャップ付き) JL05-2A24-28PC(キャップ付き)
5˚ T点 相手側コネクタJL05-6A24-28S 45˚ T点 相手側コネクタJL05-6A24-28S4 P点 T
1391 をご準備ください。 P点
T
L をご準備ください。
90 1593˚ 681 710
A 矢視 B A 814 779 矢視 B
640 640
˚ 540
540
120 220±0.1 220±0.1 290±0.1 290±0.1
2×ϕ 20H7 20˚ 2×ϕ 20H7 8×ϕ 22B 1B
0 0
C S C S
×ϕ 320±0.18 22 290±0.1 290±0.1 2×ϕ 16H7
820 360±0.1 ϕ 12H7 820 384±0.1
0 1037 3159 0 1037 3159
矢視 C 矢視 C
マニピュレータ標準仕様 マニピュレータ標準仕様
名 称 MOTOMAN-MPL500 許容慣性モーメント 名 称 MOTOMAN-MPL800 許容慣性モーメント
T 軸 (手首回転 ) 200 kgm2 T 軸 (手首回転 ) 550 kgm2
形 式 YR-MPL0500-J00 (GD2/4) 形 式 YR-MPL0800-J00 (GD2/4)
構 造 垂直多関節形 (4自由度 ) 本 体 質 量 2300 kg 構 造 垂直多関節形 (4自由度 ) 本 体 質 量 2550 kg
可 搬 質 量 500 kg 温 度 0˚C~+45˚C 可 搬 質 量 800 kg 温 度 0˚C~+45˚C
繰 り 返 し 位 置 決 め 精 度 *1 ±0.5 mm 湿 度 20%~80%RH (結露のないこと ) 繰 り 返 し 位 置 決 め 精 度 *1 ±0.5 mm 湿 度 20%~80%RH (結露のないこと )
S 軸 ( 旋 回 ) −180˚~+180˚ 振 動 4.9 m/s2以下 S 軸 ( 旋 回 ) −180˚~+180˚ 振 動 4.9 m/s2以下
− + 設 置 環 境 設 置 環 境( )
動 作 範 囲 L 軸 下 腕 45˚ ~ 90˚ 引火性及び腐食性ガス液体がないこと L 軸
( 下 腕 ) − +動 作 範 囲 45˚ ~ 90˚ 引火性及び腐食性ガス液体がないこと
U 軸 ( 上 腕 ) −120˚~+15.5˚ そ の 他 水,油,粉じんなどがかからないこと U 軸 ( 上 腕 ) −120˚~+15.5˚ そ の 他 水,油,粉じんなどがかからないこと
T 軸 (手 首 回 転 ) −360˚~+360˚ 電気的ノイズ源が近くにないこと T 軸 (手 首 回 転 ) −360˚~+360˚ 電気的ノイズ源が近くにないこと
S 軸 ( 旋 回 ) 1.48 rad/s, 85˚/s 電 源 容 量 *2 8.0 kVA S 軸 ( 旋 回 ) 1.13 rad/s, 65˚/s 電 源 容 量 *2 8.0 kVA
( )
最 大 速 度 L 軸 下 腕 1.48 rad/s, 85˚/s *1 : JIS B 8432に準拠しています。
( )
最 大 速 度 L 軸 下 腕 1.13 rad/s, 65˚/s *1 : JIS B 8432に準拠しています。U 軸 ( 上 腕 ) 1.48 rad/s, 85˚/s *2 :用途,動作パターンにより異なります。 U 軸 ( 上 腕 ) 1.13 rad/s, 65˚/s *2 :用途,動作パターンにより異なります。
T 軸 (手 首 回 転 ) 3.40 rad/s, 195˚/s (注 )本表はSI単位系で記載しています。 T 軸 (手 首 回 転 ) 2.18 rad/s, 125˚/s (注 )本表はSI単位系で記載しています。
8 9
2529
880 1250
300
2363 1300
2624 1600
360±0.1
640
540
200
10
320±0.1 300±0.1
80±0.05 8
2529
880 1250
40
300
2363 1300
1600
2624
640
540
200
10
290±0.1 290±0.1
365±0.1 80±0.05 8
30˚
.5˚15
˚
90
68
R8
30˚
15.5˚
37
10R
Page9
MOTOMAN-MPL500 MOTOMAN-MPL800
可搬質量 500kg,最大リーチ R3159mm 可搬質量 800kg,最大リーチ R3159mm
外形寸法及び動作範囲 単位 : mm : T点動作範囲 外形寸法及び動作範囲 単位 : mm : T点動作範囲
1600
1300 1300
73 ϕ ϕ7 100H7R 100H7
ϕ ϕ250h6 250h6
R3 R159 1037 R3159
12×M12 ϕ 12×M12
ϕ 深さ : : 18 深さ 18
ϕ
ϕ 10H7 10H7 深さ : 10
深さ : 10 1600
矢視 A 矢視 A
フィールドバスケーブル用
チューブ(内径 ϕ 12()ベース内) フィールドバスケーブル用
2781 チューブ(内径 ϕ 12()ベース内)2781 エア入口
614 2167 A B C D E (
614 2167
A,B,C,D,E) A B C D E
270 1400 250 5×Rc3/8タップ
270 1400 250 エア入口
R1124 カバープラグ付き R1124 (A,B,C,D,E)
5×Rc3/8タップ
U カバープラグ付きU
2204 2204
L 装備ケーブルコネクタ(ベース側) 装備ケーブルコネクタ(ベース側)
JL05-2A24-28PC(キャップ付き) JL05-2A24-28PC(キャップ付き)
5˚ T点 相手側コネクタJL05-6A24-28S 45˚ T点 相手側コネクタJL05-6A24-28S4 P点 T
1391 をご準備ください。 P点
T
L をご準備ください。
90 1593˚ 681 710
A 矢視 B A 814 779 矢視 B
640 640
˚ 540
540
120 220±0.1 220±0.1 290±0.1 290±0.1
2×ϕ 20H7 20˚ 2×ϕ 20H7 8×ϕ 22B 1B
0 0
C S C S
×ϕ 320±0.18 22 290±0.1 290±0.1 2×ϕ 16H7
820 360±0.1 ϕ 12H7 820 384±0.1
0 1037 3159 0 1037 3159
矢視 C 矢視 C
マニピュレータ標準仕様 マニピュレータ標準仕様
名 称 MOTOMAN-MPL500 許容慣性モーメント 名 称 MOTOMAN-MPL800 許容慣性モーメント
T 軸 (手首回転 ) 200 kgm2 T 軸 (手首回転 ) 550 kgm2
形 式 YR-MPL0500-J00 (GD2/4) 形 式 YR-MPL0800-J00 (GD2/4)
構 造 垂直多関節形 (4自由度 ) 本 体 質 量 2300 kg 構 造 垂直多関節形 (4自由度 ) 本 体 質 量 2550 kg
可 搬 質 量 500 kg 温 度 0˚C~+45˚C 可 搬 質 量 800 kg 温 度 0˚C~+45˚C
繰 り 返 し 位 置 決 め 精 度 *1 ±0.5 mm 湿 度 20%~80%RH (結露のないこと ) 繰 り 返 し 位 置 決 め 精 度 *1 ±0.5 mm 湿 度 20%~80%RH (結露のないこと )
S 軸 ( 旋 回 ) −180˚~+180˚ 振 動 4.9 m/s2以下 S 軸 ( 旋 回 ) −180˚~+180˚ 振 動 4.9 m/s2以下
− + 設 置 環 境 設 置 環 境( )
動 作 範 囲 L 軸 下 腕 45˚ ~ 90˚ 引火性及び腐食性ガス液体がないこと L 軸
( 下 腕 ) − +動 作 範 囲 45˚ ~ 90˚ 引火性及び腐食性ガス液体がないこと
U 軸 ( 上 腕 ) −120˚~+15.5˚ そ の 他 水,油,粉じんなどがかからないこと U 軸 ( 上 腕 ) −120˚~+15.5˚ そ の 他 水,油,粉じんなどがかからないこと
T 軸 (手 首 回 転 ) −360˚~+360˚ 電気的ノイズ源が近くにないこと T 軸 (手 首 回 転 ) −360˚~+360˚ 電気的ノイズ源が近くにないこと
S 軸 ( 旋 回 ) 1.48 rad/s, 85˚/s 電 源 容 量 *2 8.0 kVA S 軸 ( 旋 回 ) 1.13 rad/s, 65˚/s 電 源 容 量 *2 8.0 kVA
( )
最 大 速 度 L 軸 下 腕 1.48 rad/s, 85˚/s *1 : JIS B 8432に準拠しています。
( )
最 大 速 度 L 軸 下 腕 1.13 rad/s, 65˚/s *1 : JIS B 8432に準拠しています。U 軸 ( 上 腕 ) 1.48 rad/s, 85˚/s *2 :用途,動作パターンにより異なります。 U 軸 ( 上 腕 ) 1.13 rad/s, 65˚/s *2 :用途,動作パターンにより異なります。
T 軸 (手 首 回 転 ) 3.40 rad/s, 195˚/s (注 )本表はSI単位系で記載しています。 T 軸 (手 首 回 転 ) 2.18 rad/s, 125˚/s (注 )本表はSI単位系で記載しています。
8 9
2529
880 1250
300
2363 1300
2624 1600
360±0.1
640
540
200
10
320±0.1 300±0.1
80±0.05 8
2529
880 1250
40
300
2363 1300
1600
2624
640
540
200
10
290±0.1 290±0.1
365±0.1 80±0.05 8
30˚
.5˚15
˚
90
68
R8
30˚
15.5˚
37
10R
Page10
MOTOMAN-MPLシリーズ
ロボットコントローラDX200 標準仕様 プログラミングペンダント 標準仕様
項 目 仕 様 項 目 仕 様 パレタイジング用途最適化ロボット
構 造 防じん構造 IP54 外 形 寸 法 169(幅)× 50(厚さ)× 314.5(高さ) mm
MPL80II : 600(幅)×520(奥行き)×730(高さ) mm* 概 略 質 量 0.990 kg
100 kg(外部3軸内蔵可) 材 質 強化プラスチック
外 形 寸 法, MPL100II , MPL160II , MPL300II , MPL500II
: 選択キー,軸操作キー,数値 /アプリケーション MOTOMAN-MPLシリーズ
600(幅)×640(奥行き)×730(高さ) mm* キー, キー付きモード切り替えスイッチ(ティーチ概 略 質 量
110 kg(外部3軸内蔵可) モード,プレイモード,リモートモード),非常停止
MPL800II : 600(幅)×520(奥行き)× 操 作 機 器1230(高さ) mm* ボタン,イネーブルスイッチ,コンパクトフラッ
160 kg(外部1軸内蔵可) シュカード I/F装備(コンパクトフラッシュはオ
冷 却 方 式 間接冷却 プション),USBポート(1ポート)装備
周 囲 温 度 通電時 : 0˚C ~ +45˚C,保管時 : −10˚C ~ +60˚C 5.7インチカラー LCD,タッチパネル640×480
相 対 湿 度 最大90%(結露のないこと) ディスプレイ ドット(漢字,ひらがな,カタカナ,英数字,
三相AC200 V(+10% ~ −15%)50/60 Hz(±2%) その他)
電 源 仕 様
三相AC220 V(+10% ~ -15%)60 Hz(±2%) 保 護 等 級 IP65
接 地 D種接地 標準 8 m
ケ ー ブ ル 長
専用信号 : 入力 28,出力 7 最大(オプション) : 36 m(延長ケーブル追加)
入 出 力 信 号 汎用信号 : 入力 40,出力 40
(トランジスタ出力 32,リレー出力 8)
位 置 制 御 方 式 シリアル通信方式(絶対値エンコーダ)
JOB : 200,000ステップ,10,000ロボット命令
メ モ リ 容 量
CIOラダー(最大) : 20,000ステップ
拡 張 ス ロット PCI : 2スロット
LAN(上位接続) 1個(10BASE-T/100BASE-TX)
シ リ ア ル I/F RS-232C : 1個
制 御 方 式 ソフトウェアサーボ
ドライブユニット ACサーボ用サーボパック
* : コントローラの外側に取付けた器具の寸法は含んでいません。
安全上の ・ご使用の前に取扱説明書とその他の付属書類などをすべて熟読し, 正しくご使用ください。
ご注意 ・本製品の故障や誤操作が直接人命を脅かしたり, 人体に危害を及ぼすおそれがある用途に使用する場合は, その都度検討が必要ですので当社営業窓口までご照会ください。
・本資料中の適用写真は, 分かりやすく説明するために安全さくなど法令法規などで定められた安全のための機器, 装置を取り除いて撮影しています。
また, イラストなどはイメージを表現したものです。
技術・アフターサービスに関するお問い合わせ(YASKAWAコンタクトセンタ) 製品・技術情報サイト e-メカサイト
TEL 0120-502-495 ●技術相談 ●資料請求 eメカ 検 索月~金(祝日及び当社休業日は除く)
0120-394-094 9:00~12:00,13:00~17:00 URL: http://www.e-mechatronics.com/FAX
●アフターサービス 安川電機製品の最新情報をご覧いただけます。
E-mail robotcc@yaskawa-eng.co.jp 24時間365日
製造・販売
株式会社 安川電機 URL: https://www.yaskawa.co.jp/
販売 品質及び環境マネジメントシステムの
東京支社 TEL( 03)5402-4525 FAX( 03)5402-4581 国際規格 ISO9001, ISO14001を取得
〒105-6891 東京都港区海岸1丁目16番1号 ニューピア竹芝サウスタワー 8階 しています。
中部支店 TEL( 0561)36-9324 FAX( 0561)36-9312
〒470-0217 愛知県みよし市根浦町2丁目3番1号
大阪支店 TEL( 06)6346-4535 FAX( 06)6346-4556
〒530-0003 大阪市北区堂島2丁目4番27号 新藤田ビル4階
九州支店 TEL( 092)714-5906 FAX( 092)761-5136 QMS Accreditation
〒810-0001 福岡市中央区天神1丁目6番8号 天神ツインビル14階 R009 JQA-0813 JQA-EM0202
◆各地区の営業所は e-メカサイト の「お問い合わせ」でご確認ください。
本製品の最終使用者が軍事関係であったり,用途が兵器などの製造用である場合には,
「外国為替及び外国貿易法」の定める輸出規制の対象となることがありますので,
輸出される際には十分な審査及び必要な輸出手続きをお取りください。
製品改良のため,定格,仕様,寸法などの一部を予告なしに変更することがあります。
© 2010 YASKAWA ELECTRIC CORPORATION
資料番号 KAJP C940560 01E <11>-0
Published in Japan 2019年 5月
R1-00-18-10