




オーバーシュートレス 脱調レス 振動レス 低発熱
このカタログについて
| ドキュメント名 | ステッピングモータを高性能化 Si super (エスアイスーパー) |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 6.9Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社三明 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
ソフトウェア Support software
Si super
支援ソフトウェア Sanmei Invention Servo
Si super Si super
Wave ステッピングモータを高性能化 エスアイスーパー
ダウンロードサービス オーバーシュートレス 脱調レス 振動レス 低発熱
http://www.sanmei.co.jp(ユーザー専用ページ)
用 途 Uses
●割り出しテーブル 等 ●ハンドリング ●押し付け制御
●ローダー装置 ●エアーシリンダーの置き換え 等
●スライダー 等
●ねじ締め機
●組立機のフィーダー 等
http://www.sanmei.co.jp
技術お問い合わせ 最高峰の 高品質で
三明電子産業株式会社 性能 安定的
〒424-0924 静岡県静岡市清水区清開2-2-1 TEL 054-335-5588 FAX 054-335-7363
営業お問い合わせ
株式会社 三 明
本 社 〒424-0825 静岡県静岡市清水区松原町6-16 TEL 054-353-3271 FAX 054-352-1648
東 京 支 店 〒113-0033 東京都文京区本郷3丁目18-16(岩片ビル6階) TEL 03-5803-1621 FAX 03-3813-3431
神奈川営業所 〒243-0035 神奈川県厚木市愛甲東3-15-12 TEL 046-228-0244 FAX 046-229-0339
北関東営業所 〒360-0035 埼 玉 県 熊 谷 市 河 原 町 1 - 9 4 TEL 048-527-0780 FAX 048-527-1340
浜 松 支 店 〒430-0911 静岡県浜松市中区新津町658-1 TEL 053-461-1094 FAX 053-461-3879
沼 津 営 業 所 〒410-0062 静 岡 県 沼 津 市 宮 前 町 1 4 - 4 TEL 055-922-5333 FAX 055-922-3609
名古屋営業所 〒465-0096 愛知県名古屋市名東区桜が丘1 TEL 052-783-3927 FAX 052-783-5134
大 阪 支 店 〒532-0011 大阪府大阪市淀川区西中島5-11-10 TEL 06-6309-5123 FAX 06-6305-0326
長 野 営 業 所 〒399-8204 長野県安曇野市豊科高家2287-28 TEL 0263-71-4560 FAX 0263-71-4522
山 形 営 業 所 〒990-0023 山 形 県 山 形 市 松 波 4 - 6 - 5 TEL 023-629-6455 FAX 023-629-6456
北 陸 営 業 所 〒930-0966 富山県富山市石金 2丁目4 - 2 TEL 076-420-6573 FAX 076-420-6574
内容は予告なく変更することもございますのでご注意ください。 株式会社 三 明
カタログ No. SP-1301A-01
x4_307-302-001.indd 1 13/04/04 8:59
Page2
本当に必要な性能を凝縮
ステッピングモータを 高性能化
残留振動抑制・・・・・・完全停止までの時間を最小限に
トレス 振動レス
モータが回転状態から急停止を行うと、停止したときの衝撃で振動が発生し、残留振
バーシュー 低発熱
動となります。オーバーシュートのような大きな振幅はありませんが、この残留振動が
オー 調レス なくなるまで、機械は作業を行うことができません。Si superでは通常のステッピング脱 モータとは比較にならないほど、急速に振動を収束させ、装置のタクトタイムを大きく
短縮することが可能となります。
Si super
(4ms) 残留振動時間比較
圧倒的な振動収束
Si super
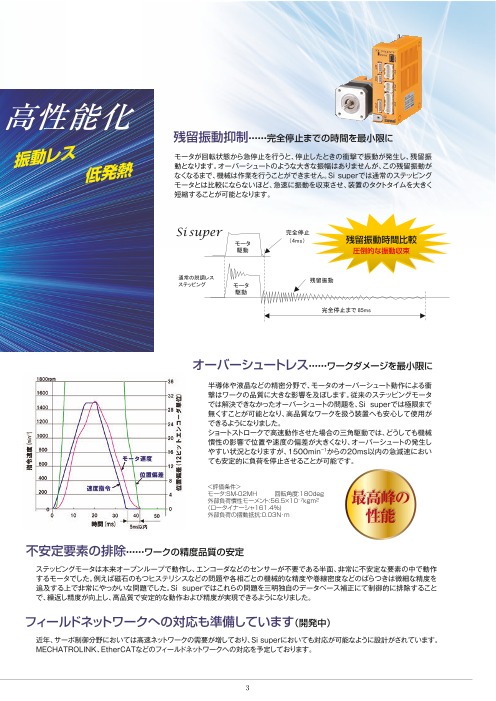
オーバーシュートレス・・・・・・ワークダメージを最小限に
半導体や液晶などの精密分野で、モータのオーバーシュート動作による衝
撃はワークの品質に大きな影響を及ぼします。従来のステッピングモータ
では解決できなかったオーバーシュートの問題を、Si superでは極限まで
最新の制御技術とハードウェアにより、 無くすことが可能となり、高品質なワークを扱う装置へも安心して使用が
できるようになりました。
ステッピングモータの能力を最大限に発揮させます。 ショートストロークで高速動作させた場合の三角駆動では、どうしても機械
慣性の影響で位置や速度の偏差が大きくなり、オーバーシュートの発生し
ハードウェアには最新のCPUを搭載、さらにフィードバック系には12ビット1回転アブソリュートエンコーダを採用し、電流分解能 やすい状況となりますが、1500min-1からの20ms以内の急減速におい
も従来と比較し大幅にアップさせています。 ても安定的に負荷を停止させることが可能です。
(60min-1) 低速域でもステッピングモータとは比較出来ないほどの滑らかさ <評価条件>
当社独自のデータベース補正制御を組み合わせることで、滑
モータ:SM-02MH 回転角度:180deg
外部負荷慣性モーメント:56.5×10-7kgm2 最高峰の
らかさと高速性を追求し、ステッピングモータとしては最高峰 (ロータイナーシャ161.4%)
の性能を実現しています。 外部負荷の摺動抵抗:0.03N・m 性能
高品質で 不安定要素の排除・・・・・・ワークの精度品質の安定
<評価条件>
安定的
ステッピングモータは本来オープンループで動作し、エンコーダなどのセンサーが不要である半面、非常に不安定な要素の中で動作
モータ型式:SM-02MH(Si super)
負荷慣性モーメント:45×10-7kgm^2 するモータでした。例えば磁石のもつヒステリシスなどの問題や各相ごとの機械的な精度や巻線密度などのばらつきは微細な精度を
追及する上で非常にやっかいな問題でした。Si superではこれらの問題を三明独自のデータベース補正にて制御的に排除すること
で、繰返し精度が向上し、高品質で安定的な動作および精度が実現できるようになりました。
USBインターフェースと外部入出力 フィールドネットワークへの対応も準備しています(開発中)
パソコンとの親和性を高めるためにUSBインターフェースを標準搭載し、USB-HUBを利用した多軸一括管理システムが 近年、サーボ制御分野においては高速ネットワークの需要が増しており、Si superにおいても対応が可能なように設計がされています。
利用できます。また外部入出力は入力6点、出力6点を搭載し、より使い易いインターフェースを充実させました。 MECHATROLINK、EtherCATなどのフィールドネットワークへの対応を予定しております。
2 3
x4_307-302-001.indd 2 13/04/04 8:59
(min-1)
Page3
本当に必要な性能を凝縮
ステッピングモータを 高性能化
残留振動抑制・・・・・・完全停止までの時間を最小限に
トレス 振動レス
モータが回転状態から急停止を行うと、停止したときの衝撃で振動が発生し、残留振
バーシュー 低発熱
動となります。オーバーシュートのような大きな振幅はありませんが、この残留振動が
オー 調レス なくなるまで、機械は作業を行うことができません。Si superでは通常のステッピング脱 モータとは比較にならないほど、急速に振動を収束させ、装置のタクトタイムを大きく
短縮することが可能となります。
Si super
(4ms) 残留振動時間比較
圧倒的な振動収束
Si super
オーバーシュートレス・・・・・・ワークダメージを最小限に
半導体や液晶などの精密分野で、モータのオーバーシュート動作による衝
撃はワークの品質に大きな影響を及ぼします。従来のステッピングモータ
では解決できなかったオーバーシュートの問題を、Si superでは極限まで
最新の制御技術とハードウェアにより、 無くすことが可能となり、高品質なワークを扱う装置へも安心して使用が
できるようになりました。
ステッピングモータの能力を最大限に発揮させます。 ショートストロークで高速動作させた場合の三角駆動では、どうしても機械
慣性の影響で位置や速度の偏差が大きくなり、オーバーシュートの発生し
ハードウェアには最新のCPUを搭載、さらにフィードバック系には12ビット1回転アブソリュートエンコーダを採用し、電流分解能 やすい状況となりますが、1500min-1からの20ms以内の急減速におい
も従来と比較し大幅にアップさせています。 ても安定的に負荷を停止させることが可能です。
(60min-1) 低速域でもステッピングモータとは比較出来ないほどの滑らかさ <評価条件>
当社独自のデータベース補正制御を組み合わせることで、滑
モータ:SM-02MH 回転角度:180deg
外部負荷慣性モーメント:56.5×10-7kgm2 最高峰の
らかさと高速性を追求し、ステッピングモータとしては最高峰 (ロータイナーシャ161.4%)
の性能を実現しています。 外部負荷の摺動抵抗:0.03N・m 性能
高品質で 不安定要素の排除・・・・・・ワークの精度品質の安定
<評価条件>
安定的
ステッピングモータは本来オープンループで動作し、エンコーダなどのセンサーが不要である半面、非常に不安定な要素の中で動作
モータ型式:SM-02MH(Si super)
負荷慣性モーメント:45×10-7kgm^2 するモータでした。例えば磁石のもつヒステリシスなどの問題や各相ごとの機械的な精度や巻線密度などのばらつきは微細な精度を
追及する上で非常にやっかいな問題でした。Si superではこれらの問題を三明独自のデータベース補正にて制御的に排除すること
で、繰返し精度が向上し、高品質で安定的な動作および精度が実現できるようになりました。
USBインターフェースと外部入出力 フィールドネットワークへの対応も準備しています(開発中)
パソコンとの親和性を高めるためにUSBインターフェースを標準搭載し、USB-HUBを利用した多軸一括管理システムが 近年、サーボ制御分野においては高速ネットワークの需要が増しており、Si superにおいても対応が可能なように設計がされています。
利用できます。また外部入出力は入力6点、出力6点を搭載し、より使い易いインターフェースを充実させました。 MECHATROLINK、EtherCATなどのフィールドネットワークへの対応を予定しております。
2 3
x4_307-302-001.indd 3 13/04/04 8:58
(min-1)
Page4
仕 様 Specification 接 続 Connection
ドライバ仕様
型式 Si-02DS
適用モータ型式( B)はブレーキ付 SM-L5MH、SM-02MH(B)、SM-04MH(B)、SM-09MH(B)、SM-12MH(B) ※1 ステータス LED USB
出力電流 / 最大電流(Ao-p) 2.0 / 4.0
制御モード サーボ制御モード / ステップ制御モード パラメータにて切替 1
2
制御方式 トランジスタPWM(正弦波駆動) 1MT 3
許容負荷イナーシャ モータイナーシャの30倍
1 4
モーター動力 EC 2
位置フィードバック 12ビット1回転アブソリュートエンコーダ(4096分解能) 3 モーターエンコーダ 4
概略寸法(mm) 34(W)×98(H)×80(D) 2
5
概略質量(kg) 0.24 RG
1
2
外部回生処理
電 動力 DC24V±10% 2.0A (Max 4.0A) PLS
3
4
源 制御 DC24V±10% 0.4A パルス列出力 (Si-RGVCK)オプション 5 6
位置指令方式 位置指令パルス列 7
制御入力 6点(パラメータで機能を選択) フォトカプラ最大DC30V 1 8 2 9
CW/CCW、PULSE/SIGN、A/B相入力 (パラメータで選択) PW I/O 3 10
入 11
力 5Vラインドライバ(26C31相当)、5V・24Vオ―プンコレクタからのフォトカプラ入力 電源位置指令パルス列入力 制御入出力 3 12
最大応答周波数(1相あたり)ラインドライバ:750kpps、オープンコレクタ:200kpps 1 13 2 14
(どちらもパルスデューティ50%時) アース端子 3 15
4 16
制御出力 6点(パラメータで機能を選択) オープンコレクタ 最大DC30V、50mA 5
出 ブレーキ開放出力 無電圧接点出力 最大DC60V、1A
6
7 1
力 最大出力パルス:モータ1回転1024パルス×4逓倍=4096カウント 最大8192×4逞倍=32,768カウントまで設定可能(ただし4逓倍した値が4097以上は擬似パルス) 8 2
現在位置パルス列出力 9 3
A/B相90°位相差信号、Z相信号を5Vラインドライハ(゙26C31)出力 最高周波数 1Mpps 1 0 4
回生機能 内蔵、外部に回生処理回路を接続可能 11
5
12 6
オーバトラベル防止機能 ハードOT、ソフトOT(パラメータにより有効/無効を選択) 13 7
14 8
電子ギヤ 電子ギヤの設定によりモータ1回転を (32,768×1/65,535)~(32,768×65,535/1)パルスで分割可能 制御入力による2段階切替え 電源投入シーケンス 15 9
ポイントテーブル位置決め なし 16
10
17
内
蔵 原点復帰 1回転アブソリュート初期位置パルス列出力 内蔵原点復帰機能
18
19
機 ジョグ運転 試運転調整用簡易機能あり 20
能
ステップ送り運転 試運転調整用簡易機能あり 21 4 22
速度制御運転 なし 23
24
通常時正転/逆転トルク制限値(パラメータで設定)
トルク制限機能
制御入力による正転/逆転トルク制限値5段階切替え(各トルク制限値はパラメータに設定) t1 t2
モニタ機能 LED1点(点滅によりアラーム表示) USB接続による数値モニタ(専用PCモニタソフト画面表示)
保護機能 本体EEPROM異常、モータEEPROM異常、エンコーダ異常、システム異常、位置偏差過大、A相過電流、 ※REG1は主回路電源用安定化電源でDC24Vを使用す
る。REG2と共用可能
(アラーム・警告) B相過電流、動作温度異常、過負荷、動力電源過電圧、動力電源減電圧、制御電源異常 30ms 500ms ※REG2は制御回路用安定化電源でDC24Vを使用する
300ms ※REG3はI/O用安定化電源でDC24Vを使用する
多軸接続機能 (USBハブを使用して接続することで、複数軸の設定・調整が可能) ※REG4は指令パルス列をオープンコレクタ出力する場合の安定化
推奨
シリアル通信I/F USB 1ch(Full-Speed Function)(パラメータ設定、専用PCモニタソフト用)
電源でDC5V(またはそれ以上)を使用する
※BK1,2は無電圧リレー接点出力 ELECOM U2C-MF シリーズ
規格、環境適合 UL準拠 / CE( 自己宣言) / RoHS対応
※1 Siservoのモータの駆動も可能(0.05N、0.2N、0.4N、0.9N、1.2Nタイプ)。その場合性能はSiservoと同等となります。 制御入力選択一覧 制御出力選択一覧
出力機能 コード 名称 機能 コード 名称 出力機能 コード 名称
モータ仕様 SVON 01 サーボオン TSEL0 39 トルク制限値選択 0 RDY 01 サーボレディ
PJOG 02 正転JOG TSEL1 3A 〃 1 INP 02 インポジション
型 式 (B)はブレーキ付 単位 SM-L5MH SM-02MH(B) SM-04MH(B) SM-09MH(B) SM-12MH(B) NJOG 03 逆転JOG TSEL2 3B 〃 2 ALM 03 アラーム
定格出力トルク N・m 0.06 0.15 0.29 0.49 1.2
ARST 04 アラームリセット TSEL3 3C 〃 3 SVEN 0A サーボオン可能
最大出力トルク N・m 0.11 0.25 0.49 0.86 1.8
ZSTR 06 原点スタート TSEL4 3D 〃 4 FIN 12 位置決め完了
最高回転速度 min-1 4500 4500 3000 2000 1000
POT 12 正転OT TSEL0P 40 正転方向トルク制限値選択 0 VZR 1B 零速度
定格電流 Ao-p 1.6 2.0 2.0 2.0 2.0
NOT 13 逆転OT TSEL1P 41 〃 1 TFIN 1C トルク完了
定格電圧 V 0.96 1.46 2.2 1.24 2.0
EMCE 20 非常停止(制御制動) TSEL2P 42 〃 2 FIN+TFIN 1D 位置決め完了+トルク完了
巻線抵抗 Ω 0.6±15% 0.73±15% 1.1±15% 0.62±15% 1.0±15%
EMCF 21 非常停止(サーボフリー) TSEL3P 43 〃 3 TLMT 38 トルクリミット
巻線インダクタンス mH 0.46±30% 1.1±20% 2.0±20% 1.5±20% 3.3±20%
- 2 ZSTRP 26 原点スタート(ワンショット)
TSEL4P 44 〃 4 SLMT 39 速度リミット
ロータイナーシャ ()内はブレーキ付 10 7kg・m 8 35(41) 68(74) 260(279) 430(449)
ERST 27 偏差クリア TSEL0N 48 逆転方向トルク制限値選択 0 POTOUT 3A 正転駆動禁止中
軸振れ mm T.I.R 0.025 0.05
STP 2A 停止 (ワンショット) TSEL1N 49 〃 1 NOTOUT 3B 逆転駆動禁止中
ラジアルプレイ mm MAX 0.025 0.02 0.025
0.075
ZSET 2B 機械原点書換 TSEL2N 4A 〃 2 ZFIN 3C 原点完了
スラストプレイ mm MAX
N
RSEL 38 分解能選択 TSEL3N 4B 〃 3 ZERO 3D 原点位置出力
許容オーバハング荷重 (軸先端) 21.6 20.6 52.9
許容スラスト荷重 N - 00 設定なし TSEL4N
4C 〃 4 ZPLS 3E Z相信号出力
4.9 9.8 19.6
巻線方式 ― 2相ハイブリッドステッピングモータ バイポーラ巻線 - 00 設定なし
絶縁等級 ― CLASS E CLASS B
絶縁抵抗 MΩ MIN 100 (at DC500V) 入力コードはパラメータ50,51に指定
絶縁耐圧 V 500 (at AC 1min)
※ パラメータ50,51,53,54は32bitのHEXデータとし、8bitづつに区切って各入力の機能を設定
パラメータ50 IN3 IN2 IN1 IN0
します。機能が設定された場合、該当端子は設定された機能に割り当てられます。
使用温度範囲 ℃ -10~+50 パラメータ51 – – IN5 IN4 ※ 複数の入力端子に同じ機能が割り当てられた場合、どちらか一方の入力があればその機能が実
使用相対湿度範囲 %RH 20~80 行されます。
保存温度範囲 ℃ -10~+70 出力コードはパラメータ53,54に指定 ※ 複数の出力端子に同じ機能が割り当てられた場合、その機能の出力は設定された全ての端子に
質量 Kg 0.14 0.27 0.40 0.72 1.08 パラメータ53 OUT3 OUT2 OUT1 OUT0 対し行われます。
UL準拠 / CE (自己宣言) / RoHS対応 / 鉛フリー / IP40 パラメータ54 – – OUT5 OUT4 ※ パラメータ51,54の“-”には“00”を入れて下さい。
4 5
x4_307-302-001.indd 4 13/04/04 8:58
Page5
仕 様 Specification 接 続 Connection
ドライバ仕様
型式 Si-02DS
適用モータ型式( B)はブレーキ付 SM-L5MH、SM-02MH(B)、SM-04MH(B)、SM-09MH(B)、SM-12MH(B) ※1 ステータス LED USB
出力電流 / 最大電流(Ao-p) 2.0 / 4.0
制御モード サーボ制御モード / ステップ制御モード パラメータにて切替 1
2
制御方式 トランジスタPWM(正弦波駆動) 1MT 3
許容負荷イナーシャ モータイナーシャの30倍
1 4
モーター動力 EC 2
位置フィードバック 12ビット1回転アブソリュートエンコーダ(4096分解能) 3 モーターエンコーダ 4
概略寸法(mm) 34(W)×98(H)×80(D) 2
5
概略質量(kg) 0.24 RG
1
2
外部回生処理
電 動力 DC24V±10% 2.0A (Max 4.0A) PLS
3
4
源 制御 DC24V±10% 0.4A パルス列出力 (Si-RGVCK)オプション 5 6
位置指令方式 位置指令パルス列 7
制御入力 6点(パラメータで機能を選択) フォトカプラ最大DC30V 1 8 2 9
CW/CCW、PULSE/SIGN、A/B相入力 (パラメータで選択) PW I/O 3 10
入 11
力 5Vラインドライバ(26C31相当)、5V・24Vオ―プンコレクタからのフォトカプラ入力 電源位置指令パルス列入力 制御入出力 3 12
最大応答周波数(1相あたり)ラインドライバ:750kpps、オープンコレクタ:200kpps 1 13 2 14
(どちらもパルスデューティ50%時) アース端子 3 15
4 16
制御出力 6点(パラメータで機能を選択) オープンコレクタ 最大DC30V、50mA 5
出 ブレーキ開放出力 無電圧接点出力 最大DC60V、1A
6
7 1
力 最大出力パルス:モータ1回転1024パルス×4逓倍=4096カウント 最大8192×4逞倍=32,768カウントまで設定可能(ただし4逓倍した値が4097以上は擬似パルス) 8 2
現在位置パルス列出力 9 3
A/B相90°位相差信号、Z相信号を5Vラインドライハ(゙26C31)出力 最高周波数 1Mpps 1 0 4
回生機能 内蔵、外部に回生処理回路を接続可能 11
5
12 6
オーバトラベル防止機能 ハードOT、ソフトOT(パラメータにより有効/無効を選択) 13 7
14 8
電子ギヤ 電子ギヤの設定によりモータ1回転を (32,768×1/65,535)~(32,768×65,535/1)パルスで分割可能 制御入力による2段階切替え 電源投入シーケンス 15 9
ポイントテーブル位置決め なし 16
10
17
内
蔵 原点復帰 1回転アブソリュート初期位置パルス列出力 内蔵原点復帰機能
18
19
機 ジョグ運転 試運転調整用簡易機能あり 20
能
ステップ送り運転 試運転調整用簡易機能あり 21 4 22
速度制御運転 なし 23
24
通常時正転/逆転トルク制限値(パラメータで設定)
トルク制限機能
制御入力による正転/逆転トルク制限値5段階切替え(各トルク制限値はパラメータに設定) t1 t2
モニタ機能 LED1点(点滅によりアラーム表示) USB接続による数値モニタ(専用PCモニタソフト画面表示)
保護機能 本体EEPROM異常、モータEEPROM異常、エンコーダ異常、システム異常、位置偏差過大、A相過電流、 ※REG1は主回路電源用安定化電源でDC24Vを使用す
る。REG2と共用可能
(アラーム・警告) B相過電流、動作温度異常、過負荷、動力電源過電圧、動力電源減電圧、制御電源異常 30ms 500ms ※REG2は制御回路用安定化電源でDC24Vを使用する
300ms ※REG3はI/O用安定化電源でDC24Vを使用する
多軸接続機能 (USBハブを使用して接続することで、複数軸の設定・調整が可能) ※REG4は指令パルス列をオープンコレクタ出力する場合の安定化
推奨
シリアル通信I/F USB 1ch(Full-Speed Function)(パラメータ設定、専用PCモニタソフト用)
電源でDC5V(またはそれ以上)を使用する
※BK1,2は無電圧リレー接点出力 ELECOM U2C-MF シリーズ
規格、環境適合 UL準拠 / CE( 自己宣言) / RoHS対応
※1 Siservoのモータの駆動も可能(0.05N、0.2N、0.4N、0.9N、1.2Nタイプ)。その場合性能はSiservoと同等となります。 制御入力選択一覧 制御出力選択一覧
出力機能 コード 名称 機能 コード 名称 出力機能 コード 名称
モータ仕様 SVON 01 サーボオン TSEL0 39 トルク制限値選択 0 RDY 01 サーボレディ
PJOG 02 正転JOG TSEL1 3A 〃 1 INP 02 インポジション
型 式 (B)はブレーキ付 単位 SM-L5MH SM-02MH(B) SM-04MH(B) SM-09MH(B) SM-12MH(B) NJOG 03 逆転JOG TSEL2 3B 〃 2 ALM 03 アラーム
定格出力トルク N・m 0.06 0.15 0.29 0.49 1.2
ARST 04 アラームリセット TSEL3 3C 〃 3 SVEN 0A サーボオン可能
最大出力トルク N・m 0.11 0.25 0.49 0.86 1.8
ZSTR 06 原点スタート TSEL4 3D 〃 4 FIN 12 位置決め完了
最高回転速度 min-1 4500 4500 3000 2000 1000
POT 12 正転OT TSEL0P 40 正転方向トルク制限値選択 0 VZR 1B 零速度
定格電流 Ao-p 1.6 2.0 2.0 2.0 2.0
NOT 13 逆転OT TSEL1P 41 〃 1 TFIN 1C トルク完了
定格電圧 V 0.96 1.46 2.2 1.24 2.0
EMCE 20 非常停止(制御制動) TSEL2P 42 〃 2 FIN+TFIN 1D 位置決め完了+トルク完了
巻線抵抗 Ω 0.6±15% 0.73±15% 1.1±15% 0.62±15% 1.0±15%
EMCF 21 非常停止(サーボフリー) TSEL3P 43 〃 3 TLMT 38 トルクリミット
巻線インダクタンス mH 0.46±30% 1.1±20% 2.0±20% 1.5±20% 3.3±20%
- 2 ZSTRP 26 原点スタート(ワンショット)
TSEL4P 44 〃 4 SLMT 39 速度リミット
ロータイナーシャ ()内はブレーキ付 10 7kg・m 8 35(41) 68(74) 260(279) 430(449)
ERST 27 偏差クリア TSEL0N 48 逆転方向トルク制限値選択 0 POTOUT 3A 正転駆動禁止中
軸振れ mm T.I.R 0.025 0.05
STP 2A 停止 (ワンショット) TSEL1N 49 〃 1 NOTOUT 3B 逆転駆動禁止中
ラジアルプレイ mm MAX 0.025 0.02 0.025
0.075
ZSET 2B 機械原点書換 TSEL2N 4A 〃 2 ZFIN 3C 原点完了
スラストプレイ mm MAX
N
RSEL 38 分解能選択 TSEL3N 4B 〃 3 ZERO 3D 原点位置出力
許容オーバハング荷重 (軸先端) 21.6 20.6 52.9
許容スラスト荷重 N - 00 設定なし TSEL4N
4C 〃 4 ZPLS 3E Z相信号出力
4.9 9.8 19.6
巻線方式 ― 2相ハイブリッドステッピングモータ バイポーラ巻線 - 00 設定なし
絶縁等級 ― CLASS E CLASS B
絶縁抵抗 MΩ MIN 100 (at DC500V) 入力コードはパラメータ50,51に指定
絶縁耐圧 V 500 (at AC 1min)
※ パラメータ50,51,53,54は32bitのHEXデータとし、8bitづつに区切って各入力の機能を設定
パラメータ50 IN3 IN2 IN1 IN0
します。機能が設定された場合、該当端子は設定された機能に割り当てられます。
使用温度範囲 ℃ -10~+50 パラメータ51 – – IN5 IN4 ※ 複数の入力端子に同じ機能が割り当てられた場合、どちらか一方の入力があればその機能が実
使用相対湿度範囲 %RH 20~80 行されます。
保存温度範囲 ℃ -10~+70 出力コードはパラメータ53,54に指定 ※ 複数の出力端子に同じ機能が割り当てられた場合、その機能の出力は設定された全ての端子に
質量 Kg 0.14 0.27 0.40 0.72 1.08 パラメータ53 OUT3 OUT2 OUT1 OUT0 対し行われます。
UL準拠 / CE (自己宣言) / RoHS対応 / 鉛フリー / IP40 パラメータ54 – – OUT5 OUT4 ※ パラメータ51,54の“-”には“00”を入れて下さい。
4 5
x4_307-302-001.indd 5 13/04/04 8:58
Page6
制御信号 Control signal パラメータ一覧表 Parameter list
制御入力回路 パルス指令(5Vラインドライバ) 番号 名前 再起動 単位 出荷値 番号 名前 再起動 単位 出荷値
Si super Si super 0 回転方向選択 ○ - 0 44 フォローアップ開始幅 encpls 50
1 入力パルス列種別 ○ - 0 45 位置指令ノッチフィルタ周波数1 Hz 0
2 電子ギヤ分子 ○ - 1 46 位置指令ノッチフィルタ周波数2 Hz 0
3 電子ギヤ分母 ○ - 1 50 制御入力機能設定1 ○ - 3B3A3938h
4 正転ソフトOT ○ 指令単位(pls) 0 51 制御入力機能設定2 ○ - 0427h
5 逆転ソフトOT ○ 指令単位(pls) 0 53 制御出力機能設定1 ○ - 123E031Dh
6 インポジション領域 encpls 10 54 制御出力機能設定2 ○ - 0A01h
適用ラインドライバ ※同一信号名のP側とN側はツイスト処理をして下さい。
入力回路電源はDC24V±10%(消費電流は約5mA/回路)を別途ご準備ください。 TI 製 AM26C31相当品 7 現在位置出力パルス数 ○ - 4096 56 制御入力論理設定 ○ - 0
10 制御モ-ド選択 - 0 57 制御出力論理設定 ○ - 0
制御出力回路 パルス指令(5Vオープンコレクタ) 11 チューニング設定 - 0 58 制御入力フィルタ時定数 ms 0
-1
Si super 12 位置比例ゲイン s 50 60 サーボフリー遅延時間 ms 0
Si super
13 速度比例ゲイン rad/s 500 61 位置偏差最大値 encpls 15000
14 外乱オブザーバゲイン rad/s 500 62 アラーム出力プロテクト設定 - 0
15 負荷慣性モーメント 10-7kg・m2 0 63 アラーム出力時定数 ms 0
16 速度フィードフォワード係数 % 0 64 電源投入時アブソリュート位置出力 - 0
17 位置決め電流 mA 2000 65 Z相出力時間 ms 10
18 カレントダウン電流 mA 1500 66 現在位置書き換え値 指令単位(pls) 0
出力回路用電源は別途ご準備ください。入力回路用電源と共通で使用することも可能ですが、 ・印加電圧 ≦ 30V
※同一信号名のP側とN側はツイスト処理をして下さい。 19 カレントダウン時限 ms 100 69 USB通信軸ID ○ 0
この場合電源容量は入力用電源容量に出力用電源容量を加算してください。 ・通電電流 ≦ 50mA 20 正転トルクリミッタ % 200 70 原点復帰方式 ○ - 0
誘導負荷にはダイオード等のサージ吸収素子を必ず入れてください。誤動作のおそれがあります。
21 逆転トルクリミッタ % 200 71 原点復帰方向 - 0
ブレーキ信号 パルス指令(24Vオープンコレクタ) 22 トルク選択 0 % 200 72 原点復帰速度 min
-1 60
23 トルク選択 1 % 200 73 原点復帰加減速時定数 ms 100
Si super Si super 24 トルク選択 2 % 200 74 原点復帰最終走行距離 指令単位(pls) 0
ブレーキ解除信号として、無電圧接点出力(1a)を用意 25 トルク選択 3 % 200 75 原点復帰押し当てトルク % 50
しています。
モータが励磁している時にBK1-BK2間を短絡します。 26 トルク選択 4 % 200 76 グリッドマスクパルス数 encpls 0
出力端子の印加電圧、通電電流の容量は以下の通りです。
30 トルク完了/ VZR 出力範囲 min-1 10 80 ジョグ速度 min-1 300
・印加電圧 AC125V、DC60V以下
・通電電流 1A以下 31 トルク制限値増減時定数 ms 0 81 ジョグ加減速時定数 ms 100
ブレーキコイルにはブレーキコイルの仕様に見合った 32 通常時速度制限値 min-1 4500 82 ステップ送りパルス数0 指令単位(pls) 0
バリスタ等のサージ吸収素子を必ず挿入してください。
挿入しない場合、リレー接点故障のおそれがあります。 33 トルク制限中速度制限値 min-1 4500 83 ステップ送りパルス数1 指令単位(pls) 0
※同一信号名のP側とN側はツイスト処理をして下さい。
34 トルク制限解除時速度制限値 min-1 4500 84 ステップ送りパルス数2 指令単位(pls) 0
35 速度制限値加減速時定数 ms 0 85 ステップ送りパルス数3 指令単位(pls) 0
40 位置指令パルス倍率 1 - 1 88 往復連続運転送りパルス数 指令単位(pls) 0
現在位置パルス出力信号 Pulse output signal current position 41 位置指令パルス倍率 2 - 1 89 往復運転待ち時間 ms 042 位置指令スムージングフィルタ時定数 ms 0 90 トルクノッチフィルタ周波数1 Hz 0
43 インポジション出力許可時間 ms 0 91 トルクノッチフィルタ周波数2 Hz 0
注「再起動」の欄に○のあるパラメータの設定変更は電源再投入後に有効となります。
モータエンコーダによって検出したモータ軸現在位置を、A/B相90°位相差パルス列お
よび原点パルス(モータ1回転に1パルス、Z相)として5Vラインドライバ出力します。現
在位置パルス列のモータ1回転あたりのパルス数を、パラメータ7「現在位置出力パルス ケーブル仕様 Cable specification
数」に設定します。また、パラメータ64を1に設定することで、電源投入時の1回転内アブ
ソリュート位置情報を規定時間でA/B相パルス列出力することが可能です。
電源ケーブル SiS-PWBC03M モータケーブル SiS-MCB□□M
通信仕様
USB接続 最大64軸 接続(USB-HUB経由)
USB1.1(Full Speed、最大12Mbps)USB COMクラス
準拠規格
標準仮想COMポートデバイスドライバを使用(※)
通信方式 キャラクタ方式半二重通信
データ形式 8Bit ASCIIコードHEX
最大配線長 3m (パソコンまたはHUBからの距離)
多軸接続 HUBによる多軸接続
※専用PCモニタソフトファイルに、デバイスドライバインストール情報ファイルを同梱します。 推奨USBケーブル
ELECOM
U2C-MFシリーズ(エレコム)
アラームコード一覧 ※電源の極性に十分ご注意 ください。間違えますと、
番号 アラーム名 内 容 リセット 番号 アラーム名 内 容 リセット コントローラを破損する
1 本体 EEPROM異常 ドライバの EEPROMの読出 /書込失敗 無効 8
動作温度・モータ ドライバ内部の温度が許容温度(70℃)を超えた
有効 可能性があります。
動力線異常 か、モータ動力線の断線
モータの EEPROMの読出 /書込失敗
2 モータ EEPROM異常 またはモータ未接続 無効 9
過負荷 モータが過負荷状態 有効
3 エンコーダ異常 エンコーダ線の断線を検出 無効 10 位置指令異常 位置指令が異常(数値オーバー) 有効
4 システム異常 システムが正常に動作していない 無効 12 動力電源過電圧 動力電源電圧が規定値(40V)以上か、回生異常 有効
5 位置偏差過大 位置偏差がパラメータで設定した量を超えた 有効 13 動力電源減電圧 動力電源電圧が規定値(16V)以下 有効
6 A相過電流 A相巻線に規定以上の電流が 5ms以上流れた 有効 14 制御電源過電圧 制御電源電圧が規定値(32V)以上 有効
7 B相過電流 B相巻線に規定以上の電流が 5ms以上流れた 有効 15 制御電源減電圧 制御電源電圧が規定値(16V)以下 有効
6 7
x4_307-302-001.indd 6 13/04/04 8:58
Page7
制御信号 Control signal パラメータ一覧表 Parameter list
制御入力回路 パルス指令(5Vラインドライバ) 番号 名前 再起動 単位 出荷値 番号 名前 再起動 単位 出荷値
Si super Si super 0 回転方向選択 ○ - 0 44 フォローアップ開始幅 encpls 50
1 入力パルス列種別 ○ - 0 45 位置指令ノッチフィルタ周波数1 Hz 0
2 電子ギヤ分子 ○ - 1 46 位置指令ノッチフィルタ周波数2 Hz 0
3 電子ギヤ分母 ○ - 1 50 制御入力機能設定1 ○ - 3B3A3938h
4 正転ソフトOT ○ 指令単位(pls) 0 51 制御入力機能設定2 ○ - 0427h
5 逆転ソフトOT ○ 指令単位(pls) 0 53 制御出力機能設定1 ○ - 123E031Dh
6 インポジション領域 encpls 10 54 制御出力機能設定2 ○ - 0A01h
適用ラインドライバ ※同一信号名のP側とN側はツイスト処理をして下さい。
入力回路電源はDC24V±10%(消費電流は約5mA/回路)を別途ご準備ください。 TI 製 AM26C31相当品 7 現在位置出力パルス数 ○ - 4096 56 制御入力論理設定 ○ - 0
10 制御モ-ド選択 - 0 57 制御出力論理設定 ○ - 0
制御出力回路 パルス指令(5Vオープンコレクタ) 11 チューニング設定 - 0 58 制御入力フィルタ時定数 ms 0
-1
Si super 12 位置比例ゲイン s 50 60 サーボフリー遅延時間 ms 0
Si super
13 速度比例ゲイン rad/s 500 61 位置偏差最大値 encpls 15000
14 外乱オブザーバゲイン rad/s 500 62 アラーム出力プロテクト設定 - 0
15 負荷慣性モーメント 10-7kg・m2 0 63 アラーム出力時定数 ms 0
16 速度フィードフォワード係数 % 0 64 電源投入時アブソリュート位置出力 - 0
17 位置決め電流 mA 2000 65 Z相出力時間 ms 10
18 カレントダウン電流 mA 1500 66 現在位置書き換え値 指令単位(pls) 0
出力回路用電源は別途ご準備ください。入力回路用電源と共通で使用することも可能ですが、 ・印加電圧 ≦ 30V
※同一信号名のP側とN側はツイスト処理をして下さい。 19 カレントダウン時限 ms 100 69 USB通信軸ID ○ 0
この場合電源容量は入力用電源容量に出力用電源容量を加算してください。 ・通電電流 ≦ 50mA 20 正転トルクリミッタ % 200 70 原点復帰方式 ○ - 0
誘導負荷にはダイオード等のサージ吸収素子を必ず入れてください。誤動作のおそれがあります。
21 逆転トルクリミッタ % 200 71 原点復帰方向 - 0
ブレーキ信号 パルス指令(24Vオープンコレクタ) 22 トルク選択 0 % 200 72 原点復帰速度 min
-1 60
23 トルク選択 1 % 200 73 原点復帰加減速時定数 ms 100
Si super Si super 24 トルク選択 2 % 200 74 原点復帰最終走行距離 指令単位(pls) 0
ブレーキ解除信号として、無電圧接点出力(1a)を用意 25 トルク選択 3 % 200 75 原点復帰押し当てトルク % 50
しています。
モータが励磁している時にBK1-BK2間を短絡します。 26 トルク選択 4 % 200 76 グリッドマスクパルス数 encpls 0
出力端子の印加電圧、通電電流の容量は以下の通りです。
30 トルク完了/ VZR 出力範囲 min-1 10 80 ジョグ速度 min-1 300
・印加電圧 AC125V、DC60V以下
・通電電流 1A以下 31 トルク制限値増減時定数 ms 0 81 ジョグ加減速時定数 ms 100
ブレーキコイルにはブレーキコイルの仕様に見合った 32 通常時速度制限値 min-1 4500 82 ステップ送りパルス数0 指令単位(pls) 0
バリスタ等のサージ吸収素子を必ず挿入してください。
挿入しない場合、リレー接点故障のおそれがあります。 33 トルク制限中速度制限値 min-1 4500 83 ステップ送りパルス数1 指令単位(pls) 0
※同一信号名のP側とN側はツイスト処理をして下さい。
34 トルク制限解除時速度制限値 min-1 4500 84 ステップ送りパルス数2 指令単位(pls) 0
35 速度制限値加減速時定数 ms 0 85 ステップ送りパルス数3 指令単位(pls) 0
40 位置指令パルス倍率 1 - 1 88 往復連続運転送りパルス数 指令単位(pls) 0
現在位置パルス出力信号 Pulse output signal current position 41 位置指令パルス倍率 2 - 1 89 往復運転待ち時間 ms 042 位置指令スムージングフィルタ時定数 ms 0 90 トルクノッチフィルタ周波数1 Hz 0
43 インポジション出力許可時間 ms 0 91 トルクノッチフィルタ周波数2 Hz 0
注「再起動」の欄に○のあるパラメータの設定変更は電源再投入後に有効となります。
モータエンコーダによって検出したモータ軸現在位置を、A/B相90°位相差パルス列お
よび原点パルス(モータ1回転に1パルス、Z相)として5Vラインドライバ出力します。現
在位置パルス列のモータ1回転あたりのパルス数を、パラメータ7「現在位置出力パルス ケーブル仕様 Cable specification
数」に設定します。また、パラメータ64を1に設定することで、電源投入時の1回転内アブ
ソリュート位置情報を規定時間でA/B相パルス列出力することが可能です。
電源ケーブル SiS-PWBC03M モータケーブル SiS-MCB□□M
通信仕様
USB接続 最大64軸 接続(USB-HUB経由)
USB1.1(Full Speed、最大12Mbps)USB COMクラス
準拠規格
標準仮想COMポートデバイスドライバを使用(※)
通信方式 キャラクタ方式半二重通信
データ形式 8Bit ASCIIコードHEX
最大配線長 3m (パソコンまたはHUBからの距離)
多軸接続 HUBによる多軸接続
※専用PCモニタソフトファイルに、デバイスドライバインストール情報ファイルを同梱します。 推奨USBケーブル
ELECOM
U2C-MFシリーズ(エレコム)
アラームコード一覧 ※電源の極性に十分ご注意 ください。間違えますと、
番号 アラーム名 内 容 リセット 番号 アラーム名 内 容 リセット コントローラを破損する
1 本体 EEPROM異常 ドライバの EEPROMの読出 /書込失敗 無効 8
動作温度・モータ ドライバ内部の温度が許容温度(70℃)を超えた
有効 可能性があります。
動力線異常 か、モータ動力線の断線
モータの EEPROMの読出 /書込失敗
2 モータ EEPROM異常 またはモータ未接続 無効 9
過負荷 モータが過負荷状態 有効
3 エンコーダ異常 エンコーダ線の断線を検出 無効 10 位置指令異常 位置指令が異常(数値オーバー) 有効
4 システム異常 システムが正常に動作していない 無効 12 動力電源過電圧 動力電源電圧が規定値(40V)以上か、回生異常 有効
5 位置偏差過大 位置偏差がパラメータで設定した量を超えた 有効 13 動力電源減電圧 動力電源電圧が規定値(16V)以下 有効
6 A相過電流 A相巻線に規定以上の電流が 5ms以上流れた 有効 14 制御電源過電圧 制御電源電圧が規定値(32V)以上 有効
7 B相過電流 B相巻線に規定以上の電流が 5ms以上流れた 有効 15 制御電源減電圧 制御電源電圧が規定値(16V)以下 有効
6 7
x4_307-302-001.indd 7 13/04/04 8:59
Page8
ケーブル仕様 Cable specification ドライバ外形寸法 Dimensions driver
Si-02DS (全モータ共通)
回生ケーブル Si-RGVC パルス出力ケーブル SiS-PLS03M
DIN レール(下記お客様準備)
※電源の極性に十分ご注意 ・レール取付足:タカチ電機DRT-1
ください。間違えますと、 ・固定用ビス:小平3点セムスネジP4M3×6mm 4 本
コントローラを破損する
可能性があります。 標準モータ 外形図及びトルク特性表
Drawing and torque characteristics table
SM-L5MH ドライバ:Si-02DS DC24V電源供給モータ :SM-L5MH
エンコーダケーブル SiS-ECB□□M I/Oケーブル SiS-IOB03M
0.05Nタイプ
min-1
SM-02MH ドライバ:Si-02DS DC24V電源供給
0.2Nタイプ モータ :SM-02MH
min-1
I/Oケーブル SiS-IOPLS03M
SM-04MH ドライバ:Si-02DS DC24V電源供給
0.4Nタイプ モータ :SM-04MH
min-1
8 9
x4_307-302-001.indd 8 13/04/04 8:59
Page9
ケーブル仕様 Cable specification ドライバ外形寸法 Dimensions driver
Si-02DS (全モータ共通)
回生ケーブル Si-RGVC パルス出力ケーブル SiS-PLS03M
DIN レール(下記お客様準備)
※電源の極性に十分ご注意 ・レール取付足:タカチ電機DRT-1
ください。間違えますと、 ・固定用ビス:小平3点セムスネジP4M3×6mm 4 本
コントローラを破損する
可能性があります。 標準モータ 外形図及びトルク特性表
Drawing and torque characteristics table
SM-L5MH ドライバ:Si-02DS DC24V電源供給モータ :SM-L5MH
エンコーダケーブル SiS-ECB□□M I/Oケーブル SiS-IOB03M
0.05Nタイプ
min-1
SM-02MH ドライバ:Si-02DS DC24V電源供給
0.2Nタイプ モータ :SM-02MH
min-1
I/Oケーブル SiS-IOPLS03M
SM-04MH ドライバ:Si-02DS DC24V電源供給
0.4Nタイプ モータ :SM-04MH
min-1
8 9
x4_307-302-001.indd 9 13/04/04 8:59
Page10
標準モータ 外形図及びトルク特性表 Drawing and torque characteristics table ブレーキ付モータ 外形図及びトルク特性表 Drawing and torque characteristics table
SM-09MH ドライバ:Si-02DS DC24V電源供給 0.9Nタイプ SM-09MHB
0.9Nタイプ モータ :SM-09MH 1.2Nタイプ SM-12MHB
ドライバ:Si-02DS DC24V電源供給
モータ :SM-09MHB
min-1
L
min-1
SM-12MH ドライバ:Si-02DS DC24V電源供給 ドライバ:Si-02DS DC24V電源供給
1.2Nタイプ モータ :SM-12MH モータ :SM-12MHB
ブレーキ仕様
min-1
min-1
減速機 Decelerator
ブレーキ付モータ 外形図及びトルク特性表 Drawing and torque characteristics table
静音 60dB(A)
ドライバ:Si-02DS DC24V電源供給 コンパクト はすば歯車を使用した静音減速機を採用。
SM-02MHB モータ :SM-02MHB コンパクトで脈動のない滑らかな回転を実現しました。
0.2Nタイプ 遊星ギヤ 減速比 1/3 1/5 1/9 の3機種を用意
SM-04MHB
0.4Nタイプ SM-02MH(B)
SM-04MH(B)
SM-09MH(B)
SM-12MH(B)
min-1
ドライバ:Si-02DS DC24V電源供給
L モータ :SM-04MHB
減速機付モータ型式
SM-□□MH(B) - G□□
モータ型式 ※出力トルク等の詳細仕様については
減速比 別途お問合せください。
0 3: 1 / 3 0 5: 1 / 5 0 9: 1 / 9
min-1
10 11
x4_307-302-001.indd 10 13/04/04 8:59