



ロボットシステムに使われる部品の開設など、自動化に関するお役立ち情報をまとめました。
⑴光電センサとは?
①光電センサの原理と特長
②製造現場における光電センサについて
③光電センサの種類
④まとめ
⑵CMOSとCCDセンサー
①イメージセンサーとは
②CMOSセンサーとは?
③CCDセンサーとは?
④CMOSセンサーとCCDセンサーの違いについて
⑶電磁弁とは?
①電磁弁の構造と種類
②電磁弁を取り扱う上での注意点
③現場での活用事例「ローラ部品の油取り自動化」
④まとめ
⑷PLCとは?
①PLCでロボット制御をする理由
②PLCでロボット制御をするメリット
③PLCを使ったロボット運用事例【ハウジングの油取り工程】
④PLCでのロボット制御の注意点
⑸PLCのラダー図とは?
①PLC·シーケンス制御について
②シーケンス制御にラダー図を用いるメリット
③ラダー図で使用する基本的な記号
④まとめ
このカタログについて
| ドキュメント名 | ロボット導入・自動化お役立ち情報 部品編 |
|---|---|
| ドキュメント種別 | ハンドブック |
| ファイルサイズ | 7.5Mb |
| 取り扱い企業 | 株式会社JRC(ALFIS) (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
ロボット導入
自動化
お役立ち情報 部品編
06-6543-8180
〒 550-0011 大阪市西区阿波座2丁目1番1号 CAMCO西本町ビル9階
Page2
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報⑨
光電センサとは?
製造現場での活用方法と種類やその原理を解説
光電センサは光を利用したセンサのことで、その用途の広さから様々な場所で活用されています。
日常的な場面では「テレビやエアコンなどのリモコン」や「自動ドアの開閉」などが使用され
ています。製造現場においても応答の速さや非接触という点で生産効率の向上に大きく貢献し
ています。
今回は光電センサの活用方法やその種類についてご紹介いたします。
1 光電センサの原理と特長 るメリットは以下の通りです。
PLC の種類について
光電センサは光を利用したセンサのこと
で、その用途の広さから様々な場所で活用さ 受信する光が高速であり、尚且つ光電セン
れています。 サの内部回路が電子部品で構成されているた
日常的な場面では「テレビやエアコンなど め、瞬時に検知する事が可能です。
のリモコン」や「自動ドアの開閉」などが使 この応答時間が早ければ、他の装置も素早
用されています。製造現場においても応答の く次の動作に移行できるため、生産性の向上
速さや非接触という点で生産効率の向上に大 に大きく貢献します。
きく貢献しています。 非接触で検出が可能
今回は光電センサの活用方法やその種類に
ついてご紹介いたします。 光を使うため、物質に接触することなく検
出を行うことが出来ます。
可視光線の長波長端(760-830 nm)から、 接触する事で発生する物質にダメージを与
1 mm くらいまでの波長範囲の電磁波。 えてしまうリスクや接触する事が危険な物質
肉眼で見ることはできない。波長によっ に触れるリスクをなく作業を行うことが出来
て、近赤外線(2.5 μ m 以下)、赤外線(2.5 ます。
μ m - 25 μ m)、遠赤外線(25 μ m 以上) またセンサ自体も物質に触れないため傷つ
と区別される。赤外線の波長は、μ m(マ くことがないため、長期的に使用することが
イクロメートル)単位で表されることが 可能です。
多い。1 μ m= 1 × 10-6 (0.000001) m。 検出物体に対する制約が少ない
引用元:東洋大学 生物分子科学科 光の変化や変化で検知するため、物質の材
https://www.toho-u.ac.jp/sci/biomol/glossary/chem/infrared_light.html 料が金属や木材などの固体でも液体であって
も問題なく検出することが出来ます。透明な
これらに仕組みによる光電センサを活用す 物質であっても問題なく検出可能です。
1
Page3
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報⑨
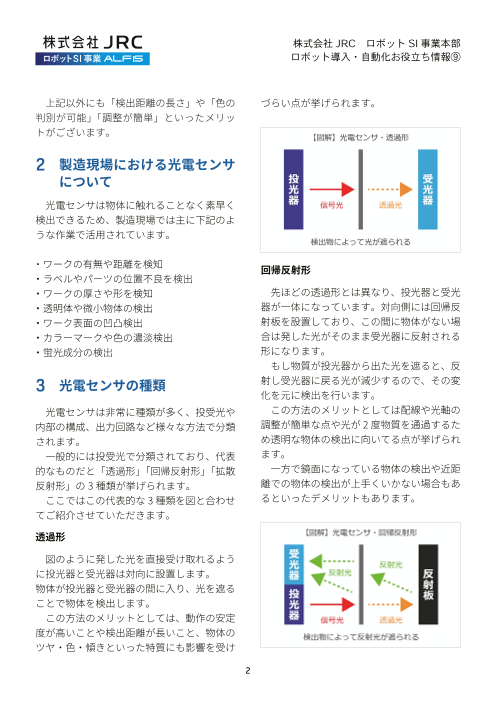
上記以外にも「検出距離の長さ」や「色の づらい点が挙げられます。
判別が可能」「調整が簡単」といったメリッ
トがございます。
2 製造現場における光電センサ
について
光電センサは物体に触れることなく素早く
検出できるため、製造現場では主に下記のよ
うな作業で活用されています。
・ワークの有無や距離を検知 回帰反射形
・ラベルやパーツの位置不良を検出
・ワークの厚さや形を検知 先ほどの透過形とは異なり、投光器と受光
・透明体や微小物体の検出 器が一体になっています。対向側には回帰反
・ワーク表面の凹凸検出 射板を設置しており、この間に物体がない場
・カラーマークや色の濃淡検出 合は発した光がそのまま受光器に反射される
・蛍光成分の検出 形になります。
もし物質が投光器から出た光を遮ると、反
3 光電センサの種類 射し受光器に戻る光が減少するので、その変
化を元に検出を行います。
光電センサは非常に種類が多く、投受光や この方法のメリットとしては配線や光軸の
内部の構成、出力回路など様々な方法で分類 調整が簡単な点や光が 2 度物質を通過するた
されます。 め透明な物体の検出に向いてる点が挙げられ
一般的には投受光で分類されており、代表 ます。
的なものだと「透過形」「回帰反射形」「拡散 一方で鏡面になっている物体の検出や近距
反射形」の 3 種類が挙げられます。 離での物体の検出が上手くいかない場合もあ
ここではこの代表的な 3 種類を図と合わせ るといったデメリットもあります。
てご紹介させていただきます。
透過形
図のように発した光を直接受け取れるよう
に投光器と受光器は対向に設置します。
物体が投光器と受光器の間に入り、光を遮る
ことで物体を検出します。
この方法のメリットとしては、動作の安定
度が高いことや検出距離が長いこと、物体の
ツヤ・色・傾きといった特質にも影響を受け
2
Page4
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報⑨
拡散反射形
こちらも「回帰反射形」同様に投光器と受
光器が一体になっています。対向側には何も
設置しないので通常時は光が受光器に戻る事
はありません。検出物体がエリアに入った時
に物体から反射した光を受光器が受け取るこ
とで検出を行います。
この方法のメリットととしては、取り付け
が容易で省スペースで設置が可能な点が挙げ
れます。また色の判別も可能といったメリッ
トもあります。
4 まとめ
以上が光電センサに関する紹介でした。
光電センサは数多くの種類があり、それぞ
れに特徴があります。
どの現場でどのような工程に対して導入す
るかによって選ぶセンサが異なり、その選定
や検討は非常に困難です。
光電センサの導入を検討される場合は一度
専門家にご相談する事をオススメいたしま
す。
3
Page5
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報⑨
CMOS と CCD センサー
画像処理に欠かせない 2 種のイメージセンサーの原理・違いを解説
マシンビジョンにおける画像処理は、製造工程の自動化において欠かせない技術の一つです。中
でも映像を取り込むイメージセンサーはカメラ中核ともいえる装置です。
今回はそのイメージセンサーの種類についてご紹介いたします。
1 イメージセンサーとは
イメージセンサーとは、光の強弱を電気信
号に変換するセンサーで、人間でいうところ
の「目」にあたります。
「画素数」や「ピクセル」と表記されるこ
とが多く、その数値が大きければ大きいほど
取り込む画像は綺麗になりますが、その分コ
ストは高くなってしまいます。そのため現場
に合わせて必要なスペックのものを選ぶこと
が大切です。
またセンサーも大きく分けて「CMOS セン CMOSセンサーのメリット
サー」と「CCD センサー」の 2 種類があります。 CMOS センサーは、前述のように電気信号
の増幅器が各画素についているので、適した
2 CMOSセンサーとは? 場所で使用すれば信号読み出しの電気ノイズ
が軽減できるというメリットがあります。
CMOS は、「Complementary Metal Oxide 一つの半導体の中にイメージセンサーに関
Semiconductor」の略で、日本語では「相補 する仕組みを作りこめるため、安い価格で購
型金属酸化膜半導体」と呼ばれます。 入することが可能となります。
動作原理としては、フォトダイオードで光 また素子が小さいため消費電力が少ないと
を受光し、電荷に変換して蓄積。その蓄積し いうメリットもあります。
た電荷を各素子に備えられた増幅器によりそ CMOSセンサーのデメリット
の場で電圧に変換します。
一言で表すとスイッチの ON・OFF で任意 CMOS センサーのデメリットとしては、暗
の画素のみデータを読み出すことが出来ま い場所での使用する際にノイズなどトラブル
す。 が発生しやすくなることが挙げられます。原
また近年はイメージセンサーの中でシェア 因としては画素ごとに存在する増幅器の特性
の大半を占めるものになっています。 が若干異なることと言われています。
4
Page6
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報⑨
また CMOS センサーの特性上、上から下
の順番に信号を取り出していくものなので、 移った。1978 年、山田哲生(当時 東芝)は、
早く動くものを撮影した際に被写体が歪んで 強い光が入射したときに縦線の偽信号を
しまう「ローリングシャッター現象」が起き 発生させるブルーミングを抑制する縦型
てしまいます。 オーバーフロードレイン構造を発明した
2。1979 年には寺西信一(当時 NEC)
3 CCDセンサーとは? が、白傷や暗電流を大幅に低減し、残像
や転送ノイズを解消する埋込フォトダイ
CCD は、「Charge-Coupled Device」の略で、 オード(Pinned Photodiode)を発明し
日本語では「電荷結合素子」と呼ばれます。 た3。これらの結果、CCDはまずムー
動作原理としては、フォトダイオードで光 ビーを、引き続きコンパクトデジタルス
を受光し、電荷に変換して蓄積します。その チルカメラを主な市場として量産されて
電荷をそのまま伝送路に流し込み、バケツリ いった。
レーのように増幅器まで流して電圧に変換
し、一枚の画像を生成することができます。 引用元:公益社団法人発明協会 戦後日
1969 年に発明され、半世紀以上使われ続 本のイノベーション 100 選事務局
ける歴史のあるセンサーです。 https://koueki.jiii.or.jp/innovation100/innovation_detail.
php?eid=00059&age=stable-growth
CCDセンサーのメリット
CCD センサー最大のメリットは非常に高
画質な状態で画像を生成できることです。
またほぼ同時にイメージセンサー全体の信
号を読み取れるため高速で動く被写体を撮影
しても CMOS センサーで発生していた「ロー
リングシャッター現象」が起きることはあり
ません。
1970 年 に Boyle と Smith( 当 時 Bell CCDセンサーのデメリット
研 究 所 ) が C C D(Charge-Coupled
Device、電荷結合素子)を発表した 1。 デメリットとしては、CMOS に比べてコス
構造が単純であり、イメージセンサーの トの高さや消費電力の大きさが挙げられま
ような大規模なアレイ構造を製造するの す。
に適していること、矢継ぎ早にCCDに また強い光を受けると部分的に白飛びして
改善が加えられたことから、イメージ しまう「スミア」や「ブルーミング」などの
センサー開発の中心はCCDになった。 ノイズが現れることがあります。
1970 年後半からは開発の中心は日本に そのため現在では高品質な読み取りが求め
られる医療現場のカメラや高速度カメラなど
5
Page7
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報⑨
ハイエンドカメラに使用されることが多く
なっています。
4 CMOSセンサーと
CCDセンサーの違いについて
2種類のイメージセンサーの違いをまとめ
ると下記のとおりです。
CMOSセンサー CCDセンサー
消費電力 とても小さい 大きい
処理速度 速い 遅い
画質 普通 良い
機能 優れている やや劣る
価格 安価 高価
基本的には CMOS センサーが使用され、
高品質な画像処理が求められる現場などでは
CCD センサーが導入される傾向にあります
が、最近では BSI-CMOS(裏面照射型 CMOS
センサー)と呼ばれる CMOS センサーのメ
リットに加えて、約 2 倍の感度を実現したセ
ンサーも開発されています。
6
Page8
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報⑨
電磁弁とは?
基本概念から製造現場における具体的な使用例まで解説
吸引で物を持ち上げたり、風圧で商品についたゴミを吹き飛ばしたりと産業ロボットに欠かせな
い存在である『電磁弁』。
今回はそんな電磁弁の基礎をご紹介いたします。
1 電磁弁の構造と種類 と通常開型を使い分ける必要があります。
電磁弁には多様な種類が存在し、それぞれ
異なる特性を持つことから、その種類の選択
がとても重要です。
主に作動方式により、「通常閉型」と「通
常開型」の二つの種類に分けられますが、他
にも多種多様な特性や機能を持つ電磁弁が状
況ごとに使い分けられています。
「通常閉型」の電磁弁
通常閉型は電流を通すことで弁が開くとい
う動作方式の電磁弁です。
そのため、停電などの緊急事態が発生した これら通常閉型と通常開型以外にも、電流
際には自動的に閉じるという安全性を持つ一 によって流体の流れを逆にできるものも存在
方で、長時間開放状態を保つ場合にはそれだ します。また電流の強さに応じて弁の開度を
け電力が消費されるという特性があります。 微妙に調整することが可能で、より精密な流
「通常閉型」の電磁弁 体制御が求められる場合に使用される比例電
磁弁などの特殊な電磁弁も存在します。
通常開型は電流が流れていない状態では弁
が開いていて、電流を通すと弁が閉じる電磁 2 電磁弁を取り扱う上での注意点
弁です。冷却水などの流体を通常は流し続け
ておきたいが、特定の条件下で停止させたい 電磁弁は、選定からメンテナンスまで、一
場合などで用いられます。 貫して適切に管理することが重要です。ここ
安全性に関しては、停電などの緊急事態が では、電磁弁の選定における重要なポイント
発生した際には弁が自動的に開き、危険な圧 とメンテナンスの重要性についてご紹介しま
力上昇を防ぐなど通常閉型とは異なる点でア す。
プローチ出来ます。状況にあわせて通常閉型
7
Page9
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報⑨
電磁弁の選定における重要なポイント 3 現場での活用事例
「ローラ部品の油取り自動化」
電磁弁の選定では、特に素材の選定が重要
視されます。流体の性質(たとえば腐食性が
あるか、高温かなど)や環境条件(湿度が高
い場所や塩害のある環境など)に応じて、弁
体やシール材料などの素材を選ぶ必要があり
ます。素材が適切でない場合、故障や寿命の
短縮を招く可能性があります。
その他の選定ポイントとしては「電磁弁の
用途と動作条件」「電磁弁の種類」「電磁弁の
安全性と法規制」「コスト」などが挙げられ
ます。これらについても、詳しい技術者と相 ロボットの種類 協働ロボット
談の上で適切なものを選ぶことを推奨しま ワーク ハウジング
す。 工程 部品の洗浄・油取り
納入先 株式会社 JRC 本社工場
メンテナンスの重要性
元々人の手で行っていた、重くて汚れた部
電磁弁は、定期的な点検や必要なメンテナ 品の洗浄を繰り返す作業を、ロボットの導入
ンスを行うことで、異常を早期に発見し、寿 で省人化。
命を延ばすことが可能です。特に、弁の開閉 導入前はで作業で 1 つ 1 つ拭き取ってい
動作やリークの確認、電源とコイルの状態の た作業を、エアーで汚れを吹き飛ばす方法に
チェックは欠かせません。 変更しました。
異常が発生した場合は、即座に対応するこ そのエアーを出す工程で電磁弁が使用され
とが求められます。そのためには、事前に電 ています。
磁弁の動作原理を理解し、各部の役割を把握 事例URL:https://rsi.jrcnet.co.jp/column-solenoidvalve/
しておくことが重要です。
トラブルシューティングの必要性 4 電磁弁とは? まとめ
メンテナンスの一環として、トラブル 以上が電気弁に関する基本的な解説でし
シューティングの実施が推奨されます。適切 た。
なトラブルシューティングを行うためには、 電磁弁は電気エネルギーを用いて流体の流
メーカーのマニュアルや詳しい技術者のアド れを制御する便利な装置です。種類や特性を
バイスを活用することが重要です。選定から 理解し、適切に選び、正しく使用・メンテナ
メンテナンスまでの一貫した管理が、電磁弁 ンスすることで、我々の生活や工業活動をス
の性能と安全性を保つ鍵となります。 ムーズに進行させる役割を果たします。
しかしその選定やアフターフォローには多
くの知識が必要になってきます。より効果的
に活用を目指す場合は、専門家に依頼する事
をお勧めします。
8
Page10
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報⑨
PLC とは?
工場自動化の必需品!ロボット制御を行う「PLC」
PLC を一言で表すと、多数の機械を自動的に制御する装置のことです。
正式名称は「プログラマブル・ロジック・コントローラ」で、略して PLC と呼称されています。
1台の PLC でコンベヤ・モータ・センサーなどの複数のデバイスを同時に制御することが可能
です。
製品の多様化や工程の自動化によって、複雑になった工場環境には必要不可欠な装置と言って
も過言ではないでしょう。
1 PLC でロボット制御をする からの情報を取り込むユニットです。読み込
理由 むデバイスが複数あっても制御する事が可能
です。
PLC というと聞きなじみのない言葉です CPU は設定されたプログラムに沿って、
が、エレベーターやエアコンなどの私たちの 入力部で取り込んだ情報から制御のために必
身近なものにも使われています。 要な情報を算出するユニットです。
洗濯機にも組み込まれており、私たちがス ここに設定されたプログラムを変更する事
タートボタンを押すだけで「給水」「洗い」「す で、デバイスの動きを変更することが出来ま
ずぎ」「脱水」といった工程が自動で進んで す。
いきます。また途中で蓋が開いてしまうなど 出力部は CPU が算出した情報に伴って、
のトラブルが起きた場合は作業を中断し、ア デバイスに対して指示を行うユニットです。
ラームなどで異常を私たちに知らせてくれま 複数のデバイスに接続でき、デバイスに合っ
す。 た形式で出力を行います。
これらを制御するのが PLC の役割です。 電源部は各ユニットに対して電源供給を
また産業ロボットにおいては、周辺機器と 行っているユニットです。
の連携時に PLC が大きな役割を果たします。 PLC の種類について
ロボットと周辺機器を合わせて使用する
には、高度な連携が必要になってきますが、 PLC には基本的な機能が全て揃った状態で
PLC で連動して制御する事でその連携を速や 販売されている「パッケージタイプ」と、必
かに行うことが出来ます。 要な機能に合わせて部品を組み合わせて制作
する「ブロックタイプ」の 2種類が存在しま
PLC の仕組みについて す。
PLC は入力部・CPU・電源部・出力部といっ 「パッケージタイプ」は商品化されている
た 4つのユニットで構成されています。 もので、価格的にも比較的安価なため、導入
入力部はスイッチやセンサーから得た外部 のハードルも低いですが、プログラム容量や
9
Page11
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報⑨
入出力数が限られ、後々の拡張が出来ないな 簡単に動作変更が出来る
どのデメリットもあります。
「ブロックタイプ」は現場に合わせてユニッ 制御しているデバイスの動きを変更する
トを構築するもので、「ビルディングタイプ」 際、有接点シーケンス制御の場合は電気部品
とも呼ばれています。大容量で構築可能で、 を増減や配線の繋ぎ変えが必要となっていま
必要であれば拡張にも対応することが出来ま した。簡単な配線であれば問題ありませんが、
す。大規模なシステム制御にはこちらを導入 複雑なシステムの場合は、設備を長時間停止
される現場が多いです。しかし、価格が高く、 して作業を行う必要がありました。
また高度な専門知識の必要性があり「パッ 一方、PLC の場合は書き込まれているプロ
ケージタイプ」に比べて導入のハードルも高 グラムを変更する事で回路設計や動作変更が
いものとなっています。 可能です。
もちろんプログラムを書き換えるスキルを
2 PLC でロボット制御をするメ 持った作業員が必要になりますが、作業時間
リット も人員も有接点シーケンス制御に比べると少
なくなります。
PLC が出来るまでは、一般的に従来のリ ラインでトラブルが起きた際の対策も設定可
レー回路にて制御するデバイスを接続する必 能
要がありました。この方法を「有接点シーケ
ンス制御(リレーシーケンス制御)」と言い PLC に組み込むプログラムにトラブル発生
ます。 時の対策を書き込んでおけば、もしもの事態
ここではPLC導入のメリットを有接点シー にも最適な対応をロボットが行ってくれま
ケンス制御と比較してご紹介したいと思いま す。
す。 例えば、焼きあがったクッキーをコンベヤ
制御盤を小型化する事が出来る に並べていくパラレルリンクロボットの場
合、コンベアがトラブルで停止した際に、クッ
従来の有接点シーケンス制御の場合、リ キーが溢れてしまうリスクが考えられます
レー回路同士と電源を電線で接続する必要が が、あらかじめ PLC に対策用プログラムを
ありました。そのためデバイスが増えれば増 書き込むことによって、ロボットに製造した
えるほどその電線を収納する制御盤が大型化 クッキーを横に逃がす動きをさせることが可
してしまいました。 能です。
しかしPLCはプログラムを内部ソフトウェ 同じラインの工場展開が容易になる
アで管理するので、配線が不要となり、制御
盤には PLC 本体を収納するだけで良くなり 今ある工場のラインを海外などに展開する
ました。PLC によってはハガキサイズの制御 場合、有接点シーケンス制御だと現地での部
盤になる事もあります。 品手配や配線作業などの手配が必要で同じラ
PLC を用いる事で機械の省スペース化にも インを構築するだけでも大変な手間と時間が
繋がります。 かかります。
しかし PLC であれば、現工場のプログラ
10
Page12
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報⑨
ムをそのまま書き込めば良いので、最低限の ある程度の制御はロボットコントローラで
部品や配線で同じラインを構築することが出 行うことが出来ますが、今回は制御機器が多
来ます。 いことや「ハウジング供給機」と「油取り装
グローバルな生産体制が求められる昨今に 置」の連携が必要になるために PLC が導入
おいて、PLC を使った生産ラインの標準化は されています。
必要不可欠と考えられます。 下記の図のようにハウジング供給機に PLC
が組み込まれており、ハウジング供給機の各
3 PLCを使ったロボット運用事例 機器に指示を出すことに加え、油取り装置の
【ハウジングの油取り工程】 ロボットコントローラに指示を出すことで高
度な連携を可能にしています。
協働ロボットを導入する際に検討される、
安全対策の例について紹介します。 ハウジング供給機
弊社コンベヤ部品工場にて導入した事例で 入 出
センサー類 力 PLC 力 アーム
す。 など
この事例では、コンベヤローラの両端軸受け 通信(制御)
用ハウジングに付着している加工・防錆油
油取り装置
をエアーブローで除去する一連の工程に PLC
入 ロボット 出 ソレノイド
を導入しました。 センサー類 力 コントローラ 力 コンベヤ
パレテーナの中に入っているハウジングを (UNIVERSAL ROBOTS) など
“ハウジング供給機” がセンサーで見分け、
ピックアップし、コンベヤに配置します。 ロボット
コンベヤによって運ばれたハウジングを “油 (UNIVERSAL ROBOTS)
取り装置” のセンサーが感知し、アームで持
※ロボットコントローラ単体でも機器の制御を行うことが可能
ち上げ、清掃 BOX に投入します。清掃 BOX
内では、ハウジングの上下中央をエアーブ 4 PLC でのロボット制御の
ローで洗浄します。洗浄が終われば取り出し 注意点
て次の工程に移動させます。
産業ロボットの活用において重要になって
くる周辺機器との連携や省スペースでの運用
を可能にする PLC ですが、その導入には知
識が必要になってきます。
ここでは選定や運用時に発生しうるリスク
▲パレテーナから ▲コンベヤ経由で ▲エア―ブローで について一部紹介していきます。
パーツを取り出す パーツを受け渡す パーツを清掃 PLC は決して安価なものでは有りません。
こちらの装置を導入する前は1個ずつパレ 失敗を避けるためにも、導入時には PLC を
テーナから取出して油を拭き取り、パレテー 用いたロボット制御に精通したロボット Sler
ナへ戻す作業を人の手で行っていました。 へご相談ください。
11
Page13
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報⑨
PLC のメーカーによって違いがある
PLC は国内外問わず多くのメーカーより発
売されていますが、統一された規格というも
のはございません。特に PLC にプログラム
を入力するソフトに関しては、どのメーカー
も独自に開発したものを使用しており、基本
用語や使える機能なども微妙に異なっていま
す。
そのため既に PLC を導入している場合、
既存のものと異なる PLC を選定してしまう
と新たなソフトを購入するなどのコストが発
生するため、既存の PLC と同一メーカーの
ものを選定する必要があります。
また使用するロボットやセンサーなどの外
部デバイスと PLC の相性も選定には大きく
かかわってきます。
複雑な制御を行うにはPLCの知識が必要
PLC の運用において、日本では一般的に「ラ
ダー言語」と呼ばれるプログラミング言語が
多く採用されています。
ラダー言語はシーケンス図(電気回路を図
示したもの)を元に開発されたもので、有接
点シーケンス制御に慣れた技術者にとって扱
いやすい言語となっています。
しかし、一般的なプログラミング言語とは
異なり、少し特殊なものとなっているため、
開発および運用を行うためには、この言語に
精通した技術者が必要になります。
12
Page14
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報⑨
PLC のラダー図とは?
ラダー回路の記号やシーケンス制御を解説
ラダー図は、PLC(プログラマブルロジックコントローラ)の制御に使用されるプログラム言
語であり、リレー回路などの電気回路図に似た形をしています。
電気制御回路の設計に由来しており、制御対象の機器を、梯子の横棒に見立てた線でつなぐこ
とでプログラムを構築します。
この形式は実際の配線図に近いため、元々電気制御などに携わっていた人にとって親しみやす
いものとなっています。
一般的な PLC はラダー図を採用していることが多いため、シーケンス制御を用いた製造工程の
自動化には必要不可欠なプログラム言語といえます。
ラダー図のほかに「ラダープログラム」と呼ばれることもあります。
1 PLC·シーケンス制御について 2 シーケンス制御にラダー図を
用いるメリット
シーケンス制御は、機械設備等を電気制 シーケンサーのプログラミングには、ラ
御回路によってあらかじめ定められた順 ダー図の他にも「SFC 方式」や「フローチャー
序、手続きに従って自動的に動かすもの ト方式」と言われるプログラム方法がありま
で、工場内の自動化設備をはじめ、エレ すが、ラダー図が最も多く使用されています。
ベーターや自動ドア等、さまざまな装置 その理由としては、リレー回路などの電気
や設備に使われています。 回路図に似ているので、元々リレー回路で電
気設計を行っていた人は、理解しやすい言語
引用元:厚生労働省 技のとびら になっています。
https://waza.mhlw.go.jp/shokushu/list/sequence.html
3 ラダー図で使用する基本的な
複雑な製造工程の自動化には、PLC による
シーケンス制御が必要不可欠です。しかし、 記号
ただ PLC を設備に導入するだけで、自動化 ラダー図にて使用される基本的な記号につ
が完了するわけではありません。 いて簡単に説明していきます。
PLC に対してどのような制御を行うかとい 接点
う指示を送る必要があります。その指示に使
用するのがラダー図です。 接点とは、ラダー図上でスイッチのような
役割をするもので、記号は以下のようになり
ます。
13
Page15
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報⑨
が可能になります。
代表的な応用命令として、数値を足して
いく INCP 命令やプログラムの最後に入れる
END命令などがあります。
ラダー図の中ではこの接点が多く使用さ
れます。そのため、接点記号の上に X0 や Y1
といったデバイス番号という英数字が書かれ
ています。
このデバイス番号は、PLC の入力端子の番 応用命令は PLC メーカによって指令方法
号でもあるため、必ず指定する必要がありま が異なる場合もありますので、詳細について
す。 は導入される PLC の取扱説明書や、開発ソ
また接点には、電流が流れると閉じる「a フトウェアのヘルプ機能をご確認ください。
接点」と電流が流れると開く「b接点」が存 タイマ
在します。
この a接点・b接点について詳しく知りた ラダー図におけるタイマは、入力条件が
い方は、下記のコラムをご確認ください。 ON になっている時間を PLC 内でカウント
コイル し、設定した時間が経過すると接点が動作す
るデバイスです。
ラダー図におけるコイルは、実際の電気制
御におけるモータやセンサーなどといった電
気を流すことで動作する機器を表します。
実際に電気が流れることはないので、仮想
コイルと呼称されることもあります。
こちらのコイルにも先ほどの接点と同様に
デバイス番号を指定する必要があります。 PLC によるシーケンス制御では、必ずと
言っていいほど導入されているデバイスで
す。
例えばコンベヤにて材料を流し、先端のセ
ンサーが材料を感知するとコンベヤが停止す
る装置にもタイマは非常に有効的です。
上記の装置においてコンベヤの搬送中に粉
応用命令 塵が発生した場合、センサーが粉塵を感知し、
材料が所定の場所に到達していない状態でコ
応用命令はラダー図上で算術演算を行った ンベヤが停止するという誤作動を起こしてし
り、デバイスの値を転送する記号です。これ まいます。
らの様々な命令により PLC にて複雑な制御 そのようなトラブルを防ぐ際にタイマが活
14
Page16
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報⑨
躍します。
センサーが 0.5 秒感知した場合のみ、コン
ベヤを停止するようにタイマを設定すること
で誤作動を防止することができます。
ただタイマの使用も応用命令同様にPLCメー
カによって異なりますので、ご注意ください。
4 ラダー図について まとめ
以上がラダー図に関する解説でした。
ラダー図の基本はリレー回路のイメージで
すが、応用命令やタイムなどの指定方法は
PLC メーカの開発プログラムによって異なっ
てきます。
詳細については導入される PLC の取扱説
明書や、開発ソフトウェアのヘルプ機能をご
確認ください。
15