



オリジナルのロボットハンド設計事例など、自動化に関するお役立ち情報をまとめました。
⑴ロボットアームとは?
①ロボットアームとは?
②ロボットアームの仕組み
③ロボットアームを選ぶ際のポイント
④ロボットアームの使用例
⑵ロボットハンドとは?
①ロボットハンドは、人の手や指の役割をこなす
②ロボットハンドの種類と特徴
③ロボットハンドを選ぶ際のポイント
④ロボットハンドの活用例
⑶把持ハンドとは?
①把持ハンドを使用するメリット・デメリット
②エアー式把持ハンドと電動式把持ハンド
③把持ハンドを使用する際の把持方法
④把持ハンドに取り付けるつめの材質
⑷吸着ハンドとは?
①吸着ハンドを使用するメリット・デメリット
②エアー式吸着ハンドと電動式吸着ハンド
③吸着ハンドのアタッチメント
⑸ロボットハンド設計事例紹介
①把持型ロボットハンド
②吸着型ロボットハンド
③ツールチェンジャー
このカタログについて
| ドキュメント名 | ロボット導入・自動化お役立ち情報 ロボットハンド編 |
|---|---|
| ドキュメント種別 | ハンドブック |
| ファイルサイズ | 7.1Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社JRC(ALFIS) (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
ロボット導入
自動化
お役立ち情報 ロボットハンド編
06-6543-8180
〒 550-0011 大阪市西区阿波座2丁目1番1号 CAMCO西本町ビル9階
Page2
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報 ロボットハンド編
ロボットアームとは?
ロボットアームの仕組みと選定ポイント
作業者が受け持つ工程を、ロボットによって負荷軽減・効率化したいと思った場合、最初に
思いつくのが「ロボットアーム(垂直多関節式ロボット)」ではないでしょうか。
この記事では、産業用ロボットのなかでも代表的なロボットアームの仕組みや、ロボットアー
ムを選定する際のポイントについて解説します。
1 ロボットアームとは? きるため、ジョイントの数が多いほど滑らか
に動かすことができます。リンクは「力を伝
ロボットアームは、垂直多関節式ロボット える」役割を持つため、ロボットアームの動
ともよばれ、人間の腕の動きを再現すること きによって掛かる負荷に耐えられる剛性が必
ができる産業用ロボットです。産業用ロボッ 要です。
トのなかでも、もっとも多く採用されており、 関節部分にあたるジョイントを動かすため
自動車製造や食品工場、また機械加工などの には、アクチュエータや減速機、エンコーダ
金属加工や、医療業界などでも広く使われて などが必要です。
います。
その種類も多く、用途が多岐にわたるため、 ・ アクチュエータ
特定のアプリケーションに特化させたロボッ アクチュエータには、高機能なサーボ
トアームの開発も進んでいます。 モーターが使われており、位置や速度を高
2つのリンクと、3つのジョイントを組みあ い精度で制御することが可能です。このア
わせた、「6軸」の稼働が可能なロボットアー クチュエータによって、ロボットアームを
ムが一般的です。 上下・回転運動させることができます。
産業用ロボットのアクチュエータには、
2 ロボットアームの仕組み サーボモーター以外にも油圧式や空圧式の
ものがあります。特に油圧式は大きな力を
ロボットアームはどのような要素で構成さ 出しやすいため、大型のロボットアームに
れ、どのように運動するのか、その仕組みを 採用されることがあります。
解説します。 ・ 減速機
ロボットアームの構成要素 減速機は、モーターと組み合わせることで
その力を大きく増幅させるための装置で
ロボットアームは、主に人間の関節にあた す。
るジョイントと、間接以外の骨にあたるリン 自転車のギヤを重くすると、少ない回転数
クによって構成されています。 で大きな推進力を生み出せるように、減速
ジョイントはリンクの向きを変えることがで 機でモーターの力を増幅させることで、小
1
Page3
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報 ロボットハンド編
さなモーターで重いロボットアームを制御 3 ロボットアームを選ぶ際の
することができます。 ポイント
・ エンコーダ
エンコーダは、モーターがどの程度回転し ロボットアームにはさまざまな種類があり
ているかを検出する装置です。エンコーダ ます。どのような観点で選べばよいのか、そ
によって、ロボットアームがどの方向にど の選定ポイントを紹介します。
の程度動いたかを把握することが可能で 先端の可動範囲と自由度
す。ロボットアームの場合、光を用いた光
学式エンコーダを採用する場合が多いで ロボットアームの可動範囲とその自由度
す。 は、ジョイントの数と可動範囲、リンクの長
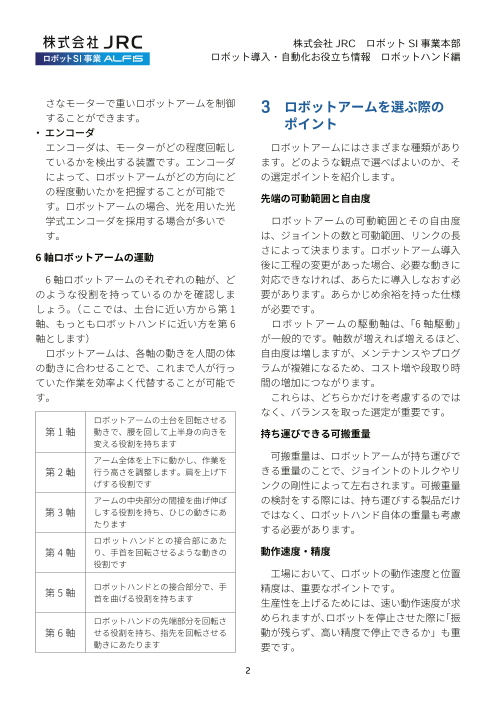
6 軸ロボットアームの運動 さによって決まります。ロボットアーム導入
後に工程の変更があった場合、必要な動きに
6軸ロボットアームのそれぞれの軸が、ど 対応できなければ、あらたに導入しなおす必
のような役割を持っているのかを確認しま 要があります。あらかじめ余裕を持った仕様
しょう。(ここでは、土台に近い方から第 1 が必要です。
軸、もっともロボットハンドに近い方を第 6 ロボットアームの駆動軸は、「6 軸駆動」
軸とします) が一般的です。軸数が増えれば増えるほど、
ロボットアームは、各軸の動きを人間の体 自由度は増しますが、メンテナンスやプログ
の動きに合わせることで、これまで人が行っ ラムが複雑になるため、コスト増や段取り時
ていた作業を効率よく代替することが可能で 間の増加につながります。
す。 これらは、どちらかだけを考慮するのでは
なく、バランスを取った選定が重要です。
ロボットアームの土台を回転させる
第 1軸 動きで、腰を回して上半身の向きを 持ち運びできる可搬重量
変える役割を持ちます
アーム全体を上下に動かし、作業を 可搬重量は、ロボットアームが持ち運びで
第 2軸 行う高さを調整します。肩を上げ下 きる重量のことで、ジョイントのトルクやリ
げする役割です ンクの剛性によって左右されます。可搬重量
アームの中央部分の間接を曲げ伸ば の検討をする際には、持ち運びする製品だけ
第 3軸 しする役割を持ち、ひじの動きにあ ではなく、ロボットハンド自体の重量も考慮
たります する必要があります。
ロボットハンドとの接合部にあた
第 4軸 り、手首を回転させるような動きの 動作速度・精度
役割です
工場において、ロボットの動作速度と位置
第 5軸 ロボットハンドとの接合部分で、手 精度は、重要なポイントです。
首を曲げる役割を持ちます 生産性を上げるためには、速い動作速度が求
ロボットハンドの先端部分を回転さ められますが、ロボットを停止させた際に「振
第 6軸 せる役割を持ち、指先を回転させる 動が残らず、高い精度で停止できるか」も重
動きにあたります 要です。
2
Page4
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報 ロボットハンド編
ロボットアームの停止時に揺れが残ってし なるワークに対応することができます。
まう場合、精密部品の組み立てなどでは、揺
れが止まるまで次の工程に移ることができま
せん。移動速度が速くても、振動の収束に時
間がかかってしまっては、生産性を上げるこ
とができません。
周辺機器との連動性
生産ラインの一部にロボットアームを組み
込む際には、周辺機器との連動性にも配慮が
必要です。
ロボットの動作速度が速くても、周辺機器
の処理能力がついてこれなければ、その性能
を発揮することができません。遅すぎる場合
には、ロボットの待ち時間が発生し、生産効
率の悪化につながります。
また、生産管理システムなどと連動させる
場合には、既に導入しているシステムと新た
段落同士の幅 に導入するロボットアームがスムーズに連携
できるかどうか、選定時に必ず確認する必要
があります。
4 ロボットアームの使用例
汎用性の高いロボットアームの使用例を紹
介します。
重量物のパレタイジングを自動化
重量物のパレタイジング工程に、出力の高
いロボットアームを導入。
負荷の高いパレタイジングをロボットに任せ
て自動化することで、作業者への負担を大幅
に軽減します。
多様な荷物のデパレタイジングを自動化
多様な荷物のデパレタイジング工程に、自
由度の高いロボットアームを導入。
ロボットハンドを工夫することで、種類の異
3
Page5
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報 ロボットハンド編
ロボットハンドとは?
ロボットハンドの種類と選定ポイント
工場の現場では、ロボットアームやパラレルリンクロボットなど、さまざまな産業用ロボット
が活用されています。それらのロボットに接続し、実際にワークをつかむのが「ロボットハンド」
です。
この記事では、ロボットハンドの種類やそれぞれの特徴、ロボットハンドを選定する際のポイ
ントについて解説します。
1 ロボットハンドは、人の手や 把持型のロボットハンド
指の役割をこなす
「把持型」は、人間の手のように複数の指
ロボットハンドは、産業用ロボットの先端 でつかむロボットハンドです。指の本数は、
に接続し、人間の手の代わりをする部品です。 2~ 4本のものが一般的です。さまざまな形
人間の手のように 5本指のハンドも開発され 状・素材のワークを扱うことができ、つかむ
ていますが、ほとんどの場合、扱うワークに 力が強いものは加工工程でワークを固定する
あわせて必要な本数で設計されているため、 ことも可能です。
2本指や 3本指のものもあります。 指の部分を動かす駆動力には、「電動」の
また、ワークをつかむのではなく吸着する ものと「空気圧」のものがあります。
タイプのハンドや、加工や溶接をそのまま行 ・ 電動型ロボットハンド
えるよう工具が装着されているものもありま 電動型は、ワークをつかむ位置を連続的に
す。近年は、複数種類の製品を共通のロボッ 設定することができ、共通のロボットハン
トハンドで扱えるような、汎用性の高いボッ ドで、サイズや向きが異なるワークを扱う
トハンドも開発されており、多品種少量生産 ことができます。
に対応することが可能です。 また、空気圧型に比べると、エア供給用の
適切なロボットハンドを活用することで、 ホースやコンプレッサが不要で、シンプル
生産性や品質向上だけでなく、新しい生産ラ な接続構成が可能です。
インを短期間で立ち上げることも可能です。 ・ 電動型ロボットハンド
空気圧型は、コントローラが不要なた
2 ロボットハンドの種類と特徴 め導入初期の設定はスムーズです。また、
展開されているバリエーションが多岐にわ
ワークを直接扱うロボットハンドは、主に たるため、目的にあった種類が見つかりや
「把持型」と「吸着型」に分類することがで すいこともメリットです。
きます。ワークの種類や状態に応じて、使い ロボットハンド自体が軽量なため可搬重量
分けがされています。 を活かすことができ、特に重いワークを扱
4
Page6
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報 ロボットハンド編
う際に用いられています。 ドの把持・吸着力が影響します。
吸着型のロボットハンド また、ワークの材質や形状、表面の状態に
よっては、把持・吸着力を発揮できない場合
「吸着型」は、ワークを吸着し運ぶロボッ があります。選定対象のロボットハンドが、
トハンドです。把持型のように、指を動かす 扱うワークに対応しているかどうかを必ず確
必要がないため、ワークをつかんだり離した 認しましょう。
りする速度が速い点が特徴です。一方で、使 特に共通のロボットハンドで複数種類の
用していくなかで、吸着力が低下してしまう ワークを扱う際には、注意が必要です。
ことがあり、把持型よりも頻繁なメンテナン ロボットハンドの材質
スが必要になります。
吸着型のロボットハンドは、吸着をする際 食品など、やわらかい材質のワークを扱う
の仕組みから、「真空型」と「磁力型」に分 場合には、ワークを傷付けないようにロボッ
類できます。 トハンドの材質に注意が必要です。近年は、
・ 真空型ロボットハンド 食品工場での使用を想定した、エラストマー
真空型は吸引型ともよばれ、真空を発生す 製のロボットハンドが開発されています。
る設備やエアコンプレッサーが必要なた ロボットハンドの制御精度
め装置全体が大きくなる傾向があります。
機構自体は単純で、大きなワークも運べま ロボットハンドの指の位置や把持力、吸着
すが、表面に水や油が付着していたり、凹 力を細かく調整できるかどうかも重要なポイ
凸や穴があると、うまく吸着できないため ントです。多くの産業用ロボットは位置制御
注意が必要です。 を行っていますが、ワークが不定形であった
・ 磁力型ロボットハンド り、位置がずれている場合、精密な制御をす
磁力型は電磁石を用いており、電流を流す ることができません。
ことでワークを吸着することができます。 精密な制御をする場合には、力覚センサな
真空型が苦手とする凹凸のある形にも対応 どを活用して力の制御をする必要がありま
できますが、磁力を用いるため、扱えるワー す。位置が一定でない場合でも、ロボットハ
ク材質が、一部の金属などに限られます。 ンドでつかむ際の力が一定になるように制御
を行えば、ワークを傷つけずにつかむことが
3 ロボットハンドを選ぶ際の 可能です。
ポイント ロボットハンドの信頼性
さまざまな種類のロボットハンドから、自 ロボットハンドは、常に作動し続けている
社の工程にあったものを選ぶ際に考慮すべき ため大きな負荷がかかります。特に段取り替
ポイントを解説します。 えがなく、同一のロボットハンドを継続的に
ロボットハンドの把持・吸着力 使用する場合には、高い信頼性が必要です。
信頼性が低い場合、使用していくなかで性
重いワークを扱えるかどうかは、ロボット 能が低下してしまうため頻繁なメンテナンス
アームの可搬重量だけでなく、ロボットハン や交換が必要になってしまい、コストアップ
5
Page7
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報 ロボットハンド編
にもつながってしまいます。 きないことがあります。
吸着型のロボットハンドを採用しつつ、食
4 ロボットハンドの活用例 品のカスを処理することで、食品を傷つけず
に整列や包装機への投入を行うことが可能で
ロボットハンドの具体的な活用例を紹介し す。
ます。
3D ビジョンを活用して最適なつかみを行う
バラ積みのワークを扱う場合、ワークの位
置や向きが一定ではありません。そこで、「3D
ビジョンセンサ」で取得した情報をもとに、
把持型のロボットハンドを制御することで、
ワークの位置や向きにあわせた最適なつかみ
方が可能です。
周囲のセンサとロボットハンドを連携させ
ることで、ロボットの前工程で人が整列など
の作業を行う必要がなくなり、生産性向上や
作業者の負荷軽減につながります。
協働ロボット向けの汎用性が高いロボットハ
ンド
協働ロボットは、作業者の代わりにライン
に入ることが可能で、複数の工程を担うこと
もあります。その都度ロボットハンドを交換
して対応することもできますが、複数の工程
に対応した汎用性の高いロボットハンドであ
れば、交換が不要です。
例えば、ワークと密着していない状態でも
吸着が可能なロボットハンドであれば、従来
の吸着型ハンドが苦手としていた、球状や円
筒状のワーク、凹凸の多いワークにも対応す
ることが可能です。
崩れやすい食品向けの吸着ロボットハンド
ラスクやクッキー、スポンジケーキなどを
扱う場合、把持型ロボットハンドでは割れた
り崩れたりしてしまったり、吸着型ロボット
ハンドでは食品のカスが原因でうまく吸着で
6
Page8
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報 ロボットハンド編
把持ハンドとは?
産業用ロボットのハンドツールを解説
産業用ロボットの先端に取り付けワークをつかむパーツを「ロボットハンド」あるいは「エン
ドエフェクタ」と呼び、ワークのつかみ方にはワークを 2 本以上のつめで挟んでつかむ「把持型」
とワークを吸着してつかむ「吸着型」の 2 種類があります。
本記事では、把持ハンドの特長について詳しく解説いたします。
1 把持ハンドを使用するメリット・ 把持ハンドを使用するデメリット
デメリット
把持ハンドは、吸着ハンドと比較して以下
把持ハンドとは、ハンドの先端に取り付け の様なデメリットがあります。
られた「つめ」が開閉することで、ワークを ・ 動作に時間がかかる
挟んで持ち上げるハンドツールです。 把持ハンドは持つとき・はなすときに毎回
把持ハンドを使用するメリットとデメリッ つめを動かす必要があるため、一瞬で吸着し
トを紹介します。 たりはなしたりできる吸着ハンドと比べる
把持ハンドを使用するメリット と、サイクルタイムが長くなってしまう傾向
があります。
把持ハンドは、吸着ハンドと比較して以下 ・ 表面に摩擦が必要
の様なメリットがあります。 つめで直接挟んで固定する構造のため、つ
・ 様々な形状・材質のワークを持つことがで るつると滑る表面のワークの場合、保持力が
きる 落ちてしまいます。
吸着ハンドの場合は、吸着することができ
る平たい面が必要です。穴の開いた形状の 2 エアー式把持ハンドと電動式
ワークや、布などの空気を通す素材のワーク 把持ハンド
は持ち上げることができません。
把持ハンドは爪で挟むことが出来さえすれ 把持ハンドの先端のつめを動かす方法に
ば持ち上げられるため、さまざまな形状や材 は、空気圧で動かす方法と電動で動かす方法
質ワークに柔軟に対応できます。 の 2 種類があります。
・ 強い保持力がある エアー式把持ハンド
小さいハンドでも強い保持力を持たせるこ
とができるため、吸着ハンドよりも重いもの エアー式の把持ハンドは、コンプレッサ等
を持ち上げることが得意です。 から送られるエアーの圧力を用いてつめの開
閉を行います。電動式の場合と比較してハン
ド部分が軽量であり、大きな把持力を持つ機
7
Page9
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報 ロボットハンド編
種も多いため、重いワークの搬送に適してい 方法や姿勢によってはつめがつかみたい位置
ます。 に届かず、つかむことができなくなることが
電動式把持ハンド あります。
内径把持(インサート把持)
電動式の把持ハンドはコンプレッサー等の
設備が要らず、電力を供給するだけでワーク 内径把持とは、ハンドのつめ部分をワーク
を把持することが可能です。ハンドツールへ の穴の部分に差し込んでからつめを外側に広
のエアー配管が不要なので、ロボットシステ げ、穴の内側の壁をつかむ把持方法です。
ムがエアー式把持ハンドよりもシンプルに構 図のフランジのように上下の両面に穴があ
成できます。騒音やスペース等の都合でコン るワークでは、内径把持のほうが外径把持よ
プレッサーが設置できない場合にも、電動式 りもつかみやすい場合があります。
が採用されます。
4 把持ハンドに取り付けるつめ
3 把持ハンドを使用する際の の材質
把持方法 把持ハンドでワークに直接触れるのは、つ
めの部分です。ワークや工程によって使用で
きる材質が異なります。
重さや価格、強度、水や薬品への耐性など
様々な条件から、適切な材質の物を選択して
設計します。
金属
把持ハンドのつめとしてよく使われる金属
把持ハンドがワークを持ち上げる方法に 素材は、スチール・ステンレス・アルミニウ
は、外径把持と内形把持の 2 種類があります。 ムなどがあります。強度と耐久性が高く、重
ワークの形状や供給時の姿勢などによって、 いワークや固いワークを持つときに使われま
よりつかみやすい方法を選びます。 す。
樹脂などと比較すると重い素材であるた
外径把持(ピンチ把持) め、ハンドツール自体の重量が大きくなって
外形把持とは、ワークを外側から挟んでつ しまうことが、金属のデメリットです。ロ
かむ把持方法です。内径把持はつめを差し込 ボットごとに可搬重量は決まっていて、ハン
む穴がないとワークをつかむことができませ ドツール等の付属品とワークの合計が可搬重
んが、外形把持の場合は内径把持よりもより 量を越えないようにする必要があるため、ハ
幅広い形状のワークに対応することができま ンドツールの重量を小さく抑えることは重要
す。 です。
一方で、他のワークと重なる場合やワーク
のすぐそばに壁がある場合など、ワーク供給
8
Page10
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報 ロボットハンド編
樹脂
把持ハンドのつめに用いられる樹脂素材は
多岐にわたりますが、強度と価格等を考慮し
て汎用エンジニアリングプラスチック類がよ
く使われています。(例:ポリアセタール、
MC ナイロン など)
金属より軽いため、小さく軽いワークの場
合によく使用されます。
ゴム
食品のように形状が不均一なワークや柔ら
かく壊れやすいワークをつかめる把持ハンド
として、つめ部分にゴムが使われているハン
ドが開発されています。
つめそのものがゴム素材でできている場合
と、金属製のつめにゴム手袋のようにカバー
をかぶせたり、一部にゴムシートを張り付け
たりしている場合があります。
ゴム素材の柔軟性によりワークにフィット
させたい時だけなく、滑り止めとして採用さ
れていることもあります。
9
Page11
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報 ロボットハンド編
吸着ハンドとは?
産業用ロボットのハンドツールを解説
産業用ロボットの先端に取り付けワークをつかむパーツを「ロボットハンド」あるいは「エン
ドエフェクタ」と呼び、ワークのつかみ方にはワークを 2 本以上のつめで挟んでつかむ「把持型」
とワークを吸着してつかむ「吸着型」の 2 種類があります。
本記事では、吸着ハンドの特長について詳しく解説いたします。
1 吸着ハンドを使用するメリット・ レートなどをピックすることは困難ですが、
デメリット 吸着ハンドであれば簡単にピック出来ます。
吸着ハンドを使用するデメリット
吸着ハンドには、空気を吸い込む力でワー
クとロボットハンドの間に真空を発生させ、 吸着ハンドは、吸着ハンドと比較して以下
ワークを持ち上げるタイプと、電磁力の力で の様なデメリットがあります。
磁性のあるワークを持ち上げるタイプがあり ・ 使用できるワークが限られている
ます。 真空で吸着するハンドの場合、空気が漏れ
吸着ハンドを使用するメリットとデメリッ ないことが必須です。その為、穴が開いた形
トを紹介します。 状や大きな凹凸のある表面形状のワーク、布
吸着ハンドを使用するメリット や紙のような通気性のあるワークも持ち上げ
ることができません。
吸着ハンドは、把持ハンドと比較して以下 磁気で吸着するハンドの場合は、磁性体で
の様なメリットがあります。 あることが必須です。材質自体が問題なくて
・ つかんだりはなしたりするのが速い も、磁気をかけてはいけない機械部品などに
把持ハンドの場合、ワークをつかむ時やは も使用ができません。
なす時にはつめを動かす時間がかかります ・ メンテナンスが必要
が、吸着ハンドの場合は一瞬でつかむ・はな 吸着力が下がると、ワークを持ち上げられ
すの動作を行えます。作業のタクトタイムを なかったり、運んでいる途中に落としてしま
短くすることができるため、高速でたくさん います。吸着力不足を防止するためには、定
のワークを運ぶ作業などに向いています。 期的なメンテナンスを実施しなければなりま
・ ワークとの接触面が 1 面のみ せん。
吸着ハンドは平らな面が 1 面あれば、吸着 真空で吸着するハンドは、ノズルからほこ
して持ち上げることができます。把持ハンド りなどこまかいごみを吸い込んでしまうこと
ははさんでつかむ方式である以上、向かい合 が避けられません。内部に取り付けたフィル
う 2 か所以上の個所を持たなければいけな ターを交換したり清掃することで、吸着力低
いため、アプローチできる面が小さい薄いプ 下を防ぎます。また、ハンドの先端に取り付
10
Page12
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報 ロボットハンド編
けられたパッドも劣化するため、定期的な交 ただし、エアー式と比べると吸着力が弱く、
換が必要です。 重いものを持ち上げる場合はエアー式の方が
磁気の場合はコイルの劣化などが吸着力の劣 適しています。
化につながります。この場合も部品交換など
で対応することになります。 3 吸着ハンドのアタッチメント
2 エアー式吸着ハンドと電動式 吸着ハンドはノズルが直接ワークに触れる
吸着ハンド のではなく、先端に柔らかい素材のアタッチ
メントを取り付けて使うことが一般的です。
真空により吸着するハンドには、コンプ アタッチメントには、ワークとの隙間をな
レッサー等で圧縮空気を送って真空を発生さ くし吸着力を高めたり、ワークに傷や跡がつ
せる「エアー式」と電動真空ポンプの力で吸 かないようにする役割があります。
着する「電動式」があります。 吸着パッド
エアー式吸着ハンド
最もよく使われているアタッチメントは、
エアー式の吸着ハンドは、コンプレッサー ニトリルゴムやシリコンゴムなどのゴム素材
から送られた圧縮空気をノズルで絞ることで でできた吸着パッドです。
速度を上昇させ、圧力が下がることにより発 弊社では生の食品を直接ロボットでハンド
生する真空を利用しています。 リングする作業の自動化を行うことがありま
速度上昇と圧力の関係は「ベルヌーイの定 すが、そういった場合には食品衛生法適合素
理」で示されています。 材のゴムを使っています。
電動式吸着ハンド スポンジ
電動式の吸着ハンドはコンプレッサー等の
設備が要らず、電力を供給するだけで真空を
生み出しワークをピックすることが可能で
す。エアー供給がなく、コンプレッサーを設
置するスペースのない場所に設置したり、設
置場所を移動してロボットを使いたい場合な
どにとても便利です。
11
Page13
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報 ロボットハンド編
吸着パッドは段ボールなどの平らな面の
ワークを強力に持ち上げることができます
が、袋状のワークなど不定形の表面に対して
はスポンジが有効です。吸着パッドと比較す
ると吸着力は劣りますが、表面に傷や吸着跡
が付きにくいため、デリケートな材質にも適
しています。
表面に細かい凹凸があるワークや、柔らか
くて強い力をかけると変形してしまうワーク
などにも使用できます。
非接触タイプ
吸着ハンドとワークとの間にエアクッショ
ンを発生させ、非接触状態で持ち上げること
ができるハンドツールがあります。密着させ
て真空を発生させる場合とは異なり、大きな
凹凸によりパッドを密着させられないワーク
や穴が開いていて空気が漏れるワーク、布や
紙などの通気性のある素材でできたワークを
吸着することが可能です。
12
Page14
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報 ロボットハンド編
ロボットハンド設計事例紹介
把持型・吸着型・ツールチェンジャー
ロボットでワークをつかむための「ロボットハンド」は、ロボットメーカーや周辺機器メーカー
などから様々な種類のものが販売されています。しかし、ワークのピック方法やプレイス方法、
あるいはワーク本体に特徴があるため市販品のロボットハンドが採用できないケースは珍しく
ありません。
本記事では、JRC【ALFIS】がロボットシステムの設計に合わせてロボットハンド開発を行った
様々な事例をご紹介します。
1 把持型ロボットハンド 1枚目をピック後 2枚目の上に 1枚目を一
度置き 2枚まとめてもちあげるという動きを
まずは把持型のロボットハンドからご紹介 するために、このロボットハンドはピック時
します。ロボット先端に取り付けたツメで、 やプレイス時、搬送中に重ねた 2枚がずれな
ワークを挟み込んで持ち上げるタイプのロ いような設計になっています。
ボットハンドです。 重ねた 2枚を変形しない程度に押さえられ
食品用把持型ロボットハンド るパッドが取り付けられており、爪を開く・
閉じるときのタイミングにもポイントがあり
ます。
内径把持型ロボットハンド
ロボットの種類 パラレルリンクロボット
ワーク 焼き菓子
材質 ステンレス(ツメ部分)
工程 焼き菓子の搬送 ロボットの種類 産業用ロボット
焼き菓子を重ねて搬送するための、4つ爪 ワーク ハウジング(金属製のローラー部品)
外径 60 ㎜ ~160 ㎜の範囲で 10 種類
チャックハンドです。 材質 ステンレス(ツメ部分)
包装前に、コンベヤ上を流れてくる焼き菓
工程 メッシュパレットからの
子を 2枚縦に積み上げて整列する工程で使用 バラ積みピッキング
されました。
13
Page15
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報 ロボットハンド編
ドーナツ型のワークの内側の穴にハンドの 2 吸着型ロボットハンド
ツメを差し込み、ツメを広げてワークをつか
むロボットハンドです。JRC 本社工場で、ロ 続いて、吸着型のロボットハンドを 4種類
ボットを用いてバラ積み状態の部品を取り出 紹介します。把持型との大きな違いは、上面
し、コンベヤ上に整列する工程に使用されて 1面のみからのアプローチでワークをピック
います。 出来ることです。
深いメッシュパレットの底の方にあるワー 食品用吸着型ロボットハンド
クまでロボットがアプローチできるようにす
るために、ツメ先が曲がっています。
ハンドツールのツメは消耗品であり、交換部
品がすぐに作れることが望ましいため、メッ
キ等の後処理が不要なステンレス素材が採用
されています。
内径把持型ロボットハンド
ロボットの種類 パラレルリンクロボット
ワーク 焼き菓子
材質 シリコンゴム(パッド部分)
工程 搬送・整列
焼きあがったお菓子がコンベヤ上をバラバ
ラに流れてくるのを、外観検査・包装前に整
列させる工程で使われているロボットハンド
ロボットの種類 産業用ロボット です。
ワーク 段ボール (約 18kg) / 瓶ケース (約 23kg) 生の食品に触れるため、パッドには食品衛
材質 ステンレス(チャックパーツ) 生法対応のシリコンゴムが使用されていま
工程 パレタイジング す。食品から発生するカスで詰まらないよう
段ボールや瓶ケースのパレタイジングに使 にフィルターが入っており、日々清掃するた
用されているロボットハンドです。 めメンテナンス性のを意識して設計されてい
パレタイジング工程ではワークを隙間なく ます。
積み上げないといけないため、分厚いロボッ
トハンドが使用できません。
薄い板状のツメで重い箱をしっかり持ちあ
げるために箱の側面を広い面積で掴み、片側
のハンドで底も支えています。
14
Page16
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報 ロボットハンド編
3 個どり吸着型ロボットハンド
間隔自由可変タイプ 医薬品などに使用される PTP シートを 10
個ずつ 1束に束ねたパックを、5つ並べて箱
に詰める工程で使われているロボットハンド
です。
コンベヤ上では 1パックごとに間隔があい
ていますが、箱には隙間なく詰める必要があ
ります。そのため、間隔が広い状態でピック
し、間隔が狭い状態で箱にプレイスできる、
間隔可変タイプのロボットハンドを設計しま
した。
ロボットの種類 パラレルリンクロボット
ワーク 焼き菓子 重量物向け吸着型ロボットハンド
材質 シリコンゴム(パッド部分)
工程 搬送・トレー詰め
ピロー包装機で個包装されたお菓子を 3つ
まとめてピックし、トレーに詰める工程で使
われているロボットハンドです。 ピロー包
装機から送られてくるお菓子は等間隔ではあ
りませんが、だからといって 1 つ 1 つピッ
ク&プレイスを繰り返していては、時間がか
かってしまいます。そのため、お菓子を 3つ ロボットの種類 協働ロボット
一気に吸着できて、かつ間隔を変えることが ワーク 段ボール(15kg)
できるハンドツールが採用されています。 材質 段ボール向け高耐久ゴム(パッド部分)
工程 搬送・パレタイジング
5 個どり吸着型ロボットハンド
間隔可変タイプ 段ボールをパレットに積みつける、ロボッ
トパレタイズシステムに搭載されているロ
ボットハンドです。
段ボール搬送に適した、耐久性のある吸着
パッドが使用されています。段ボールに付着
した紙材の切れ端を吸い込んでしまうことが
あるため、内部のつまりを防ぐためのメッ
シュフィルターを内蔵しています。
持ち上げた段ボールを搬送途中に落として
しまうと中の製品が破損する恐れがあるた
ロボットの種類 パラレルリンクロボット め、吸着力が落ちていないかセンサで監視し
ワーク PTP シート ており、吸着力が弱い時には持ち上げずに停
材質 シリコンゴム(パッド部分) 止します。これにより、フィルターの定期清
工程 搬送・カートン詰め 掃は不要となっています。
15
Page17
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報 ロボットハンド編
3 ツールチェンジャー エアーで吸着しているため、ハンドツール
にはエアーチューブと信号線の 2種類をつな
ロボットハンドに追加で搭載する、ツール いでいます。これらを簡単につけ外しできる
チェンジャーについてご紹介します。 ように、コネクタ化しワンタッチで操作でき
1つのロボットシステムで複数のワークを取 るように設計します。
り扱ったり、工程の内容が変わるような場合 これにより、上記の事例ではロボットとハ
に、ハンドツールを交換することがあります。 ンドツールの取り外しと配線まで含め、作業
このための機構を「ツールチェンジャー」と 員 1名で 20 秒ほどで交換が行えます。
呼びます。
ツールチェンジャ―にはロボットがハンド
ツールを交換する自動タイプと、手動で取り
外し・取付を行う手動タイプがあります。自
動タイプは手動タイプと比べて費用がかかる
ため、交換頻度が少ない場合は手動で交換す
る方が、コストパフォーマンスに優れていま
す。
ワーク変更に合わせたツールチェンジャー
(袋用⇔段ボール用)
ロボットの種類 協働ロボット
ワーク 段ボール(15kg)
材質 段ボール向け高耐久ゴム(パッド部分)
工程 搬送・パレタイジング
デパレタイジング工程で、袋物と段ボール
の両方を 1台のロボットデパレタイズシステ
ムで対応するために搭載されました。
袋物が積まれたパレットと段ボールが積ま
れたパレットが、どちらも入荷するような場
合に、こういったハンドツールが必要となり
ます。
16