




24 V 動作およびデジタル I/O を使用した、協働作業のための認証済み電動式 2 爪平行開閉グリッパー
このカタログについて
| ドキュメント名 | 【シュンク】小物部品用協働ロボット用グリッパ Co-act EGP-C |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 4.1Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社RYODEN (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
製品情報
小物部品用協働型グリッパー Co-act EGP-C
Page2
Co-act EGP-C
小物部品用協働型グリッパー
協働作業。 パワフル。 認証済み
Co-act EGP-C グリッパー
24 V 動作およびデジタル I/O を使用した、協働作業のための認証済み電動式 2 爪平行開閉グリッパー
適用分野
電子機器製品の組み付けおよび工作機械へのローディングの
分野での協働作業による適切な把持力での小~中サイズのワ
ークピースの把持および移動が可能。
利点とメリット
認定把持ユニット アプリケーションの安全性評価に必要な時間
を節約
プラグアンドワーク 各種のコボット(共同作業用ロボット)に対
応
デジタル I/O を介して制御 簡単な試運転と既存システムへの迅
速な統合
機能安全性 電流制限方式による生来の安全性により保証され
る安全性
ロボットインターフェース付きの組み付け済み把持ユニット 簡単迅
速な統合
統合型ステータスディスプレイ アプリケーションの状態を視覚的
に表示
衝突保護カバー内のサービス用フラップ 把持力およびセンサーシ
ステムの調整のために取付け
ブラシレス DC サーボモーター ほとんど摩耗がなく長寿命
アタッチメントフィンガー 3 種類のインサート付きが用意されて
います
サイズ 重量 把持力 ストローク / ジョー ワーク重量
数量: 2 0.59 .. 1.38 kg 140 .. 230 N 6 .. 10 mm 0.7 .. 1.15 kg
2
Page3
Co-act EGP-C
小物部品用協働型グリッパー
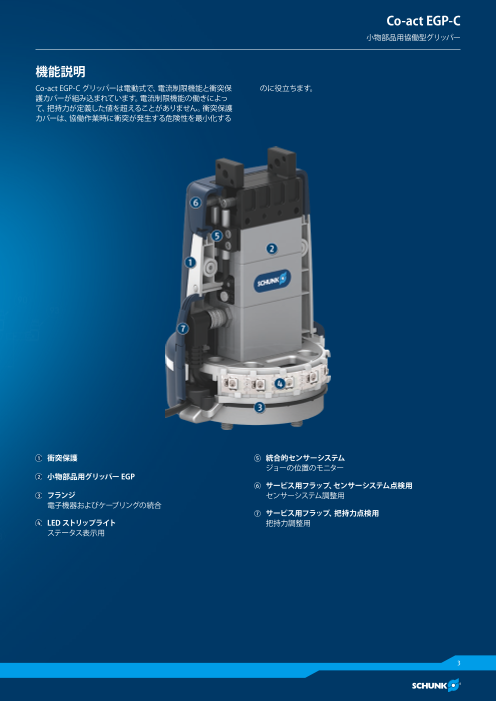
機能説明
Co-act EGP-C グリッパーは電動式で、電流制限機能と衝突保 のに役立ちます。
護カバーが組み込まれています。電流制限機能の働きによっ
て、把持力が定義した値を超えることがありません。衝突保護
カバーは、協働作業時に衝突が発生する危険性を最小化する
1 衝突保護 5 統合的センサーシステム
ジョーの位置のモニター
2 小物部品用グリッパー EGP
6 サービス用フラップ、センサーシステム点検用
3 フランジ センサーシステム調整用
電子機器およびケーブリングの統合
7 サービス用フラップ、把持力点検用
4 LED ストリップライト 把持力調整用
ステータス表示用
3
Page4
Co-act EGP-C
小物部品用協働型グリッパー
詳細な機能説明
協働作業での把持力のモニター
カタログの「把持力」とは、距離 P での、各ジョーに個別に加えられる力の算術和です (
図を参照)。ISO/TS 15066 に準拠して生体力学的な限界値を評価する場合、それぞれの
グリッパージョーに作用する把持力のみを使用する必要があります。また、取扱説明書
の情報も参照する必要があります。
1 Co-act EGP-C グリッパー 3 それぞれのグリッパージョーに加えら
れる把持力
2 グリッパージョー(カスタム製造)
4 ワーク
Co-act EGP-C の簡単組み込み
Co-act EGP-C グリッパーは、協働型ロボット (コボット) に簡単に取付けることができる
よう開発されました。組み込み時に、同梱されている取付け用材料を使用して、まずア
ダプタープレートをコボットのフランジに取り付ける必要があります。次に、同梱されて
いる六角ソケットレンチを使用して、アダプターフランジにグリッパーを取り付けます。最
後に、電気接続を行う必要があります(KETIタイプを除く)。
1 Co-act EGP-C グリッパー 4 取付け用材料
2 六角ソケットレンチ 5 コボットのフランジ
3 アダプターフランジ
複数のコボット上での簡単な「プラグアンドワーク」
標準 Co-act グリッパー EGP-Cは、KUKA、Universal Robots 、FANUC などさまざまな
メーカーの協働作業用ロボット(コボット)で利用できます。このグリッパーは、コボット
に電気的および機械的に直接取り付けることができるように調製されています。メーカ
ーのフランジの仕様に合わせて、さまざまなバージョンが用意されています。
1 Co-act-EGP-C グリッパーと KUKA 2 Co-act EGP-C グリッパ―と FANUC
LBR iiwa CR-7iA
3 Co-act EGP-C グリッパーと UR
Co-act EGP-C、Universal Robots 用
Universal Robots と Techman Robot 製のロボット用として、Co-act EGP-C グリッパー
の2種類の仕様が用意されています。URID または TMID 仕様では、ロボット制御システ
ムへの信号のフィードスルーは、ロボットのツールインターフェースを使用して行ってい
ます。ただし、この仕様は光バンドが付属しません。外部ケーブル配線を使用する場合
は、自由操作が含まれる光バンドを使用することはできません。
1 Co-act EGP-C と UR、ツールインター 2 Co-act EGP-C と UR、外部ケーブル配
フェースを使用 (バージョン URID) 線を使用 (バージョン UREK)
4
Page5
Co-act EGP-C
小物部品用協働型グリッパー
ご注文例 Co-act EGP-C
Co-act EGP - C - 40 - N - N - KTOE
Co-act = 協働アクチュエーター
電動式小物部品グリッパー EGP
C = DGUV-認証ユニット
サイズ
40
64
N =未使用
N =未使用
ロボットとフランジのインターフェース
FCR7 = FANUC CR-7 iA | EEインターフェース経由の接続
KTOE = KUKA LBR iiwa |メディアフランジ内蔵、電気
URID = Universal Robots / フィードスルー付き(電気ツールインターフェイス)
UREK = Universal Robots / 外部ケーブル
TMID = TM |フィードスルー付き(電気ツールインターフェース)
TMEK = TM | 外部ケーブル
M1013 = Doosan Robotics
FCRXID = FANUC CRX 10-iA、CRX 10-iA / L | フィードスルー付き(電気ツールインターフェイス)
FCRXEK = FANUC CRX 10-iA、CRX 10-iA / L | 外部ケーブル
ASSISTA = Mitsubishi MELFA ASSISTA | フィードスルー(電気ツールインターフェイス)付き
GoFa = ABB GoFa (CRB 15000)
5
Page6
Co-act EGP-C
小物部品用協働型グリッパー
モデルシリーズに関する一般注意事項
作動方式: ラックアンドピニオン方式 フィンガー長: 距離 P の地点の基準面から主軸の方向に測定し
ハウジングの材質: ガラス繊維強化プラスチック (ポリアミド樹 ます。
脂) 繰り返し精度: 連続 100 回のストロークでの停止位置のばらつ
ベースジョーの材質: 鋼 きを示します。
作動: サーボ電動、ブラシレス DC サーボモーター ワーク重量: 圧着接合では、静止摩擦係数 0.1 と重力加速度 g
におけるワークの滑り落ちに対する安全係数 2 にて計算しま
保証: 「組み付け・取扱説明書」をご覧ください。 す。形状接合と型締クランピングについては、許容可能なワー
納品内容: アダプターフランジ、取付け用材料、六角ソケットレ クピース重量は著しく高まります。
ンチ、組み付け・取扱説明書 (適合宣言書を含む)および安全 詳細については「組み付け・取扱説明書」をご覧ください。
性情報がセットになっているアクセサリパック 閉 / 開回数: ベースジョーまたはフィンガーが動いている純粋
把持力: は、距離 P で各グリッパージョーにかかる把持力の算 な時間です。PLC 反応時間は上記の時間に含まれていないた
術合計です (図を参照)。詳細については、詳細な機能説明を め、サイクルタイムを決める際にはこれらの値を考慮に入れる
ご覧ください。 必要があります。
アプリケーション事例
ワークの供給および位置決め時に作業者 1 小物部品用協働型グリッパー
をサポートする協働グリッパーユニット。 Co-act EGP-C
6
Page7
Co-act EGP-C
小物部品用協働型グリッパー
その他の SCHUNK 製品...
以下のコンポーネントは製品の生産性をさらに向上するた
めに最適な追加品で、 最高レベルの機能性、信頼性、制御
生産を実現します。
手動チェンジシステム アタッチメントフィンガー
i ここに掲載されている SCHUNK 製品について詳しくは、次の製品ページまたは SCHUNK のホームページ (schunk.com)
オプション、その他
汎用ロボットTechmanロボット向けのバリエーションを備えた軽量バンド。FANUC、三菱: 光バンドの使用は、UREK 仕様の場合は
Universal Robots 製品用の、TMEK 仕様の場合は Techman Robot 製品用の、FCRXEK 仕様の場合は FANUC 製品用の外部ケーブル
を使うことによって可能となります。FANUC 製品の場合は (FCR7 仕様)、グリッパーをロボットの制御システムに直接接続することで、
光バンドの使用が可能です。EE インターフェースを使用する場合は、光バンドを使用することはできません。Mitsubishi MELFA
ASSISTA 仕様では、ツールインターフェースを介してライトストリップの作動が可能です。
把持力手動調節可能: 内蔵されているロータリースイッチを使用して、Co-act EGP-C 40 の把持力を、100 %、75 %、50 %および 25 %
の 4 段階に調節することができます。把持力を調節するには、サービス用フラップを開く必要があります。
統合的センサーシステム: このグリッパーには、誘導型近接スイッチが二つ内蔵されています。これらが、標準としてグリッパーの「開」
および「閉」の位置を監視します。一つのセンサーをワークのモニターに使用することもできます。その場合は、そのセンサーを手作業
で調整可能にしてください。この場合、サイズ 40 については、サービス用フラップを開く必要があります。
SAC-安全性についての注意: 同梱されている組み付け・取扱説明書には、このグリッパーの使用に関する安全上の注意事項が含ま
れていますので、必ずご一読ください。また、アプリケーション全般に関する情報および推奨事項も含まれています。
重量: この重量は、ケーブルおよび接続プラグを含めた、Co-act グリッパー全体のものです。
Co-act チーム: SCHUNK Co-act チームのエキスパートは、人とロボットの協働作業に関するご質問にいつでもお答えいたします。電
話 (+49-7133-103-3444) または電子メール (co-act-team@de.schunk.com) にて、お問い合わせください。
7
Page8
Co-act EGP-C 40
小物部品用協働型グリッパー
把持力 寸法と最大荷重
把持力
フィンガー長
Mx 最大 1.5 Nm Mz 最大 4 Nm
My 最大 2 Nm Fz 最大 170 N
i 示されたモーメントと荷重は固定値であり、各ベ
ースジョーに作用し、同時発生することがありま
す。また、荷重は、把持力自体によって生成され
たモーメントと別に発生することがあります。
説明 Co-act EGP-C 40-N-N-GoFa
ID 1468548
一般作動データ
互換ロボット ABB GoFa (CRB 15000)
ロボットフランジ 標準フランジ
一体型センサー 有り、誘導型、2 方向
寸法 X x Y x Z [mm] 93.8 x 90.2 x 123
機械的作動データ
ストローク / ジョー [mm] 6
最大 / 最小把持力 [N] 35/140
ジョーごとの最大/最小フォース [N] 17.5/70
推奨ワーク重量 [kg] 0.7
最大許容フィンガー長 [mm] 50
フィンガー片側最大許容質量 [kg] 0.08
繰り返し精度 [mm] 0.02
閉 / 開時間 [s] 0.2/0.2
重量 [kg] 0.62
最小 / 最大周囲温度 [°C] 5/55
IP 保護等級 30
ケーブルコネクター/ケーブル端 2 x M8
ケーブル長 L1 [mm] 70
ケーブル長 L2 [mm] 175
電気的作動データ
公称電圧 [V DC] 24
定格電流 [A] 0.2
最大電流 [A] 2
電子コントローラー 内蔵
通信インターフェース デジタル I/O
デジタル I/O 数 4/2
8
Page9
Co-act EGP-C 40
小物部品用協働型グリッパー
テクニカルデータ — FANUC 用 Co-act EGP-C
説明 Co-act EGP-C 40-N-N-FCRXID Co-act EGP-C 40-N-N-FCRXEK Co-act EGP-C 40-N-N-FCR7
ID 1441947 1441949 1326456
一般作動データ
互換ロボット FANUC CRX-10iA、CRX-10iA/L FANUC CRX-10iA、CRX-10iA/L FANUC CR-7 iA
ロボットフランジ 標準フランジ 標準フランジ 標準フランジ
LED ストリップライト 内蔵 内蔵
表示色 緑色、黄色、赤色 緑色、黄色、赤色
一体型センサー 有り、誘導型、2 方向 有り、誘導型、2 方向 有り、誘導型、2 方向
寸法 X x Y x Z [mm] 93.6 x 90.2 x 123 93.6 x 90.2 x 123 93.8 x 90.2 x 120.5
機械的作動データ
ストローク / ジョー [mm] 6 6 6
最大 / 最小把持力 [N] 35/140 35/140 35/140
ジョーごとの最大/最小フォース [N] 17.5/70 17.5/70 17.5/70
推奨ワーク重量 [kg] 0.7 0.7 0.7
最大許容フィンガー長 [mm] 50 50 50
フィンガー片側最大許容質量 [kg] 0.08 0.08 0.08
繰り返し精度 [mm] 0.02 0.02 0.02
閉 / 開時間 [s] 0.2/0.2 0.2/0.2 0.2/0.2
重量 [kg] 0.59 0.86 0.66
最小 / 最大周囲温度 [°C] 5/55 5/55 5/55
IP 保護等級 30 30 30
ケーブルコネクター/ケーブル端 M8 オープンより線 オープンより線
ケーブル長 [mm] 90 4000 1000
電気的作動データ
公称電圧 [V DC] 24 24 24
定格電流 [A] 0.2 0.2 0.2
最大電流 [A] 2 2 2
電子コントローラー 内蔵 内蔵 内蔵
通信インターフェース デジタル I/O デジタル I/O デジタル I/O
デジタル I/O 数 2/2 4/2 4/2
9
Page10
Co-act EGP-C 40
小物部品用協働型グリッパー
テクニカルデータ — ユニバーサルロボット用 Co-act EGP-C
説明 Co-act EGP-C 40-N-N-URID Co-act EGP-C 40-N-N-UREK
ID 1326455 1327883
一般作動データ
互換ロボット UR 3/5/10/16 UR 3/5/10/16
ロボットフランジ 標準フランジ 標準フランジ
LED ストリップライト 内蔵
表示色 緑色、黄色、赤色
一体型センサー 有り、誘導型、2 方向 有り、誘導型、2 方向
寸法 X x Y x Z [mm] 93.8 x 90.2 x 123 93.8 x 90.2 x 123
機械的作動データ
ストローク / ジョー [mm] 6 6
最大 / 最小把持力 [N] 35/140 35/140
ジョーごとの最大/最小フォース [N] 17.5/70 17.5/70
推奨ワーク重量 [kg] 0.7 0.7
最大許容フィンガー長 [mm] 50 50
フィンガー片側最大許容質量 [kg] 0.08 0.08
繰り返し精度 [mm] 0.02 0.02
閉 / 開時間 [s] 0.2/0.2 0.2/0.2
重量 [kg] 0.59 0.86
最小 / 最大周囲温度 [°C] 5/55 5/55
IP 保護等級 30 30
ケーブルコネクター/ケーブル端 M8 オープンより線
ケーブル長 [mm] 90 4000
電気的作動データ
公称電圧 [V DC] 24 24
定格電流 [A] 0.2 0.2
最大電流 [A] 0.6 2
電子コントローラー 内蔵 内蔵
通信インターフェース デジタル I/O デジタル I/O
デジタル I/O 数 2/2 4/2
10
Page11
Co-act EGP-C 40
小物部品用協働型グリッパー
技術データ — TM 用 Co-act EGP-C
説明 Co-act EGP-C 40-N-N-TMID Co-act EGP-C 40-N-N-TMEK
ID 1374363 1375931
一般作動データ
互換ロボット TM 5/12/14 TM 5/12/14
ロボットフランジ 標準フランジ 標準フランジ
LED ストリップライト 内蔵
表示色 緑色、黄色、赤色
一体型センサー 有り、誘導型、2 方向 有り、誘導型、2 方向
寸法 X x Y x Z [mm] 93.8 x 90.2 x 123 93.8 x 90.2 x 123
機械的作動データ
ストローク / ジョー [mm] 6 6
最大 / 最小把持力 [N] 35/140 35/140
ジョーごとの最大/最小フォース [N] 17.5/70 17.5/70
推奨ワーク重量 [kg] 0.7 0.7
最大許容フィンガー長 [mm] 50 50
フィンガー片側最大許容質量 [kg] 0.08 0.08
繰り返し精度 [mm] 0.02 0.02
閉 / 開時間 [s] 0.2/0.2 0.2/0.2
重量 [kg] 0.59 0.86
最小 / 最大周囲温度 [°C] 5/55 5/55
IP 保護等級 30 30
ケーブルコネクター/ケーブル端 M8 コネクター, 8-ピン オープンより線
ケーブル長 [mm] 210 4000
電気的作動データ
公称電圧 [V DC] 24 24
定格電流 [A] 0.2 0.2
最大電流 [A] 0.6 2
電子コントローラー 内蔵 内蔵
通信インターフェース デジタル I/O デジタル I/O
デジタル I/O 数 2/2 4/2
11
Page12
Co-act EGP-C 40
小物部品用協働型グリッパー
技術仕様 — Doosan Robotics 向け Co-act EGP-C
説明 Co-act EGP-C 40-N-N-M1013
ID 1359018
一般作動データ
互換ロボット Doosan Robotics M-Series/A-Series/H-Series
ロボットフランジ 標準フランジ
一体型センサー 有り、誘導型、2 方向
寸法 X x Y x Z [mm] 93.8 x 90.2 x 123
機械的作動データ
ストローク / ジョー [mm] 6
最大 / 最小把持力 [N] 35/140
ジョーごとの最大/最小フォース [N] 17.5/70
推奨ワーク重量 [kg] 0.7
最大許容フィンガー長 [mm] 50
フィンガー片側最大許容質量 [kg] 0.08
繰り返し精度 [mm] 0.02
閉 / 開時間 [s] 0.2/0.2
重量 [kg] 0.59
最小 / 最大周囲温度 [°C] 5/55
IP 保護等級 30
ケーブルコネクター/ケーブル端 M8 コネクター, 8-ピン
ケーブル長 [mm] 100
電気的作動データ
公称電圧 [V DC] 24
定格電流 [A] 0.2
最大電流 [A] 2
電子コントローラー 内蔵
通信インターフェース デジタル I/O
デジタル I/O 数 2/2
12
Page13
Co-act EGP-C 40
小物部品用協働型グリッパー
技術データ — Mitsubishi 用 Co-act EGP-C
説明 Co-act EGP-C 40 N-N-ASSISTA
ID 1408586
一般作動データ
互換ロボット Mitsubishi MELFA ASSISTA
ロボットフランジ 標準フランジ
LED ストリップライト 内蔵
表示色 緑色、黄色、赤色
一体型センサー 有り、誘導型、2 方向
寸法 X x Y x Z [mm] 93.6 x 92.1 x 136.9
機械的作動データ
ストローク / ジョー [mm] 6
最大 / 最小把持力 [N] 35/140
ジョーごとの最大/最小フォース [N] 17.5/70
推奨ワーク重量 [kg] 0.7
最大許容フィンガー長 [mm] 50
フィンガー片側最大許容質量 [kg] 0.08
繰り返し精度 [mm] 0.02
閉 / 開時間 [s] 0.2/0.2
重量 [kg] 0.89
最小 / 最大周囲温度 [°C] 5/55
IP 保護等級 30
ケーブルコネクター/ケーブル端 M12 コネクター、8 ピン
ケーブル長 [mm] 120
フィンガーは納品内容に含まれます はい (AUB Co-act EGP 40/24)
電気的作動データ
公称電圧 [V DC] 24
定格電流 [A] 0.2
最大電流 [A] 0.6
電子コントローラー 内蔵
通信インターフェース デジタル I/O
デジタル I/O 数 2/2
13
Page14
Co-act EGP-C 40
小物部品用協働型グリッパー
テクニカルデータ — KUKA 用 Co-act EGP-C
説明 Co-act EGP-C 40-N-N-KTOE
ID 1321170
一般作動データ
互換ロボット KUKA LBR iiwa 7/14
ロボットフランジ メディアフランジ電極、接触子
LED ストリップライト 内蔵
表示色 緑色、黄色、赤色
一体型センサー 有り、誘導型、2 方向
寸法 X x Y x Z [mm] 93.8 x 90.2 x 123
機械的作動データ
ストローク / ジョー [mm] 6
最大 / 最小把持力 [N] 35/140
ジョーごとの最大/最小フォース [N] 17.5/70
推奨ワーク重量 [kg] 0.7
最大許容フィンガー長 [mm] 50
フィンガー片側最大許容質量 [kg] 0.08
繰り返し精度 [mm] 0.02
閉 / 開時間 [s] 0.2/0.2
重量 [kg] 0.62
最小 / 最大周囲温度 [°C] 5/55
IP 保護等級 30
ケーブルコネクター/ケーブル端 M12
ケーブル長 [mm] 70
電気的作動データ
公称電圧 [V DC] 24
定格電流 [A] 0.2
最大電流 [A] 2
電子コントローラー 内蔵
通信インターフェース デジタル I/O
デジタル I/O 数 4/2
14
Page15
Co-act EGP-C 40
小物部品用協働型グリッパー
Co-act EGP-C 40-N-N-GoFaのメインビュー
この図面は、ジョーを開いた状態の基本仕様のグリッパーを示しています。 1 グリッパー接続 IT M8 コネクター、3 ピン
2 フィンガー接続 IK DIN ISO-9409 ボルトサークル
GM 芯出しピン用 IL ネジ接続用貫通穴
GO ケーブル長 IM M8、4 ピンのオスコネクター
GR 芯出し用
15
Page16
Co-act EGP-C 40
小物部品用協働型グリッパー
正面図 Co-act EGP-C 40-N-N-FCRXID
この図面は、ジョーを開いた状態の基本仕様のグリッパーを示しています。 1 グリッパー接続 GR 芯出し用
2 フィンガー接続 IT M8 コネクター, 8-ピン
GM 芯出しピン用 IK DIN ISO-9409 ボルトサークル
GO ケーブル長 IL ネジ接続用貫通穴
16
Page17
Co-act EGP-C 40
小物部品用協働型グリッパー
正面図 Co-act EGP-C 40-N-N-FCRXEK
この図面は、ジョーを開いた状態の基本仕様のグリッパーを示しています。 1 グリッパー接続 GR 芯出し用
2 フィンガー接続 IT オープンより線
GM 芯出しピン用 IK DIN ISO-9409 ボルトサークル
GO ケーブル長 IL ネジ接続用貫通穴
17
Page18
Co-act EGP-C 40
小物部品用協働型グリッパー
Co-act EGP-C 40-N-N-FCR7のメインビュー
この図面は、ジョーを開いた状態の基本仕様のグリッパーを示しています。 1 グリッパー接続 GR 芯出し用
2 フィンガー接続 IT オープンより線
GM 芯出しピン用 IK DIN ISO-9409 ボルトサークル
GO ケーブル長 IL ネジ接続用貫通穴
18
Page19
Co-act EGP-C 40
小物部品用協働型グリッパー
Co-act EGP-C 40-N-N-URID 全体図
この図面は、ジョーを開いた状態の基本仕様のグリッパーを示しています。 1 グリッパー接続 GR 芯出し用
2 フィンガー接続 IT ソケット M8、8 ピン
GM 芯出しピン用 IK DIN ISO-9409 ボルトサークル
GO ケーブル長 IL ネジ接続用貫通穴
19
Page20
Co-act EGP-C 40
小物部品用協働型グリッパー
正面図 Co-act EGP-C 40-N-N-UREK
この図面は、ジョーを開いた状態の基本仕様のグリッパーを示しています。 1 グリッパー接続 GR 芯出し用
2 フィンガー接続 IT オープンより線
GM 芯出しピン用 IK DIN ISO-9409 ボルトサークル
GO ケーブル長 IL ネジ接続用貫通穴
20