




ユニバーサルロボット 協働ロボット『UR(e)シリーズ』に対応
・真空グリッパ ZXP7□01-X1
・マグネットグリッパ MHM-X7400A
・エアグリッパ JMHZ2-X7400B
このカタログについて
| ドキュメント名 | 【SMC】協働ロボット用グリッパ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 4.9Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社RYODEN (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
協働ロボット用グリッパ/UNIVERSAL ROBOTS 「UR□(e)シリーズ」対応
協働ロボット用グリッパ
UNIVERSAL ROBOTS
協働ロボット「UR(e)シリーズ」に対応
詳細はこちら
Plug and Play
真空グリッパ マグネットグリッパ エアグリッパ
ZXP7□01-X1 MHM-X7400A JMHZ2-X7400B
CAT.S160-4A A
Page2
特長
協働ロボット用グリッパ
UNIVERSAL ROBOTS
「UR□(e)シリーズ」対応製品
吸着用
真空グリッパ P.4
ZXP7□01-X1
■ 圧縮エア供給チューブ1本、電気配線M8コネクタを
接続するだけで動作可能
■ 真空エジェクタ、エア供給弁・破壊弁、圧力センサ、
パッドを一体化
■豊富なパッドバリエーションで様々なワークに対応
■取付規格:ISO9409-1-50-4-M6準拠
最大可搬質量[kg] 7
最高真空圧力[kPa] -84
吸込流量[L/min(ANR)] 17
質量[g] 581※
※パッド取付用フランジなしの場合
吸着用
マグネットグリッパ P.9
MHM-X7400A
■磁石で重量物を吸着・保持が可能
■穴あき、凹凸および複雑な形状ワークに対応
■保持力最大200N(ø25、ワーク厚さ6mm時)
■エア遮断時もワークの保持が可能
■ 圧縮エア供給チューブ1本、電気配線M8コネクタを
接続するだけで動作可能
■ソ レノイドバルブ、オートスイッチ、
ピストン速度調整機構を一体化
■取付規格:ISO9409-1-50-4-M6準拠
ワーク厚さ:2mm 160
保持力[N]
ワーク厚さ:6mm 200
質量[g] 590
1
Page3
Plug and Play
把持用
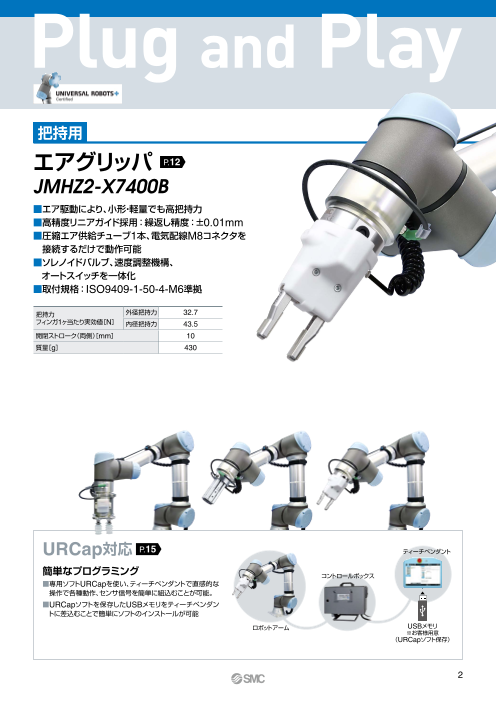
エアグリッパ P.12
JMHZ2-X7400B
■エア駆動により、小形・軽量でも高把持力
■ 高精度リニアガイド採用:繰返し精度:±0.01mm
■ 圧縮エア供給チューブ1本、電気配線M8コネクタを
接続するだけで動作可能
■ソ レノイドバルブ、速度調整機構、
オートスイッチを一体化
■取付規格:ISO9409-1-50-4-M6準拠
把持力 外径把持力 32.7
フィンガ1ヶ当たり実効値[N] 内径把持力 43.5
開閉ストローク(両側)[mm] 10
質量[g] 430
URCap対応 P.15 ティーチペンダント
簡単なプログラミング コントロールボックス
■専 用ソフトURCapを使い、ティーチペンダントで直感的な
操作で各種動作、センサ信号を簡単に組込むことが可能。
■ URCapソフトを保存したUSBメモリをティーチペンダン
トに差込むことで簡単にソフトのインストールが可能
ロボットアーム USBメモリ
※お客様用意
(URCapソフト保存)
2
Page4
CONTENTS
C O N T E N T S
協働ロボット用グリッパ
UNIVERSAL ROBOTS
「UR□(e)シリーズ」対応製品
吸着用
真空グリッパ P.4
ZXP7□01-X1
特長 ······················································································································P.4
仕様 ······················································································································P.4
パッドバリエーション例 ·······················································································P.5
型式表示方法 ······································································································P.6
機種選定 ··············································································································P.7
外形寸法図 ··········································································································P.7
製品個別注意事項 ······························································································P.8
吸着用
マグネットグリッパ P.9
MHM-X7400A
特長 ······················································································································P.9
機器構成 ··············································································································P.9
型式表示方法 ······································································································P.9
仕様 ······················································································································P.9
特性 ··················································································································· P.10
外形寸法図 ······································································································· P.10
製品個別注意事項 ··························································································· P.11
把持用
エアグリッパ P.12
JMHZ2-X7400B
特長 ··················································································································· P.12
機器構成 ··········································································································· P.12
型式表示方法 ··································································································· P.12
仕様 ··················································································································· P.12
特性 ··················································································································· P.13
外形寸法図 ······································································································· P.13
製品個別注意事項 ··························································································· P.14
URCap対応 ··································································································· P.15
3
Page5
協働ロボット用 真空グリッパ ZXP7□01-X1、特長、仕様
P協働ロlボuット用g and Play
真空グリッパ
UNIVERSAL ROBOTS
UR3(e), UR5(e), UR10(e), UR16e対応
真
空
圧縮エア供給チューブ1本、電気配線M8コネクタを グ
リ
接続するだけで動作可能 ッ
パ
■真空エジェクタ、エア供給弁・破壊弁、圧力センサ、
パッドを一体化
■取付規格:ISO9409-1-50-4-M6準拠 ■仕様
■URCap対応(P.15)
取付規格 ISO9409-1-50-4-M6準拠
適用流体 空気 マ
グ
使用温度範囲[℃] 5~50 ネ
質量[g]注1) 794(581)
共通 ッ
最大可搬質量[kg]注2) 7 ト
空気圧供給(P)ポート ワンタッチ管継手(ø6) グ
電源電圧[V] DC24±10% リ
平行ピン コネクタ形状 M8 8ピンコネクタ(ソケット) ッ
ロボット取付用フランジ
注3) パ
(ISO9409-1-50-4-M6準拠) 最高真空圧力[kPa] -84
吸込流量[L/min(ANR)]注3) 17
真空エジェクタ 空気消費量[L/min(ANR)]注3) 57
供給圧力範囲[MPa] 0.3~0.55
標準供給圧力[MPa]注4) 0.5
定格圧力範囲[kPa] 0~-101
ロボット
接続コネクタ 精度(周囲温度25℃) ±2%F.S. エ
圧力センサ
直線性 ±0.4%F.S. ア
グ
繰返し精度 ±0.2%F.S. リ
※同梱部品:ロボット取付用フランジ、平行ピン、取付用ボルト、アダプタ付パッ ッ
ド※1、プラグ※2、配管用チューブ(ø6×2m) パ
※1パッドありの場合のみ付属
エア供給ポート ※2ZXP7Aの場合のみ付属
注1() )はパッド取付用フランジなしの場合の質量。パッド付の質量はアダプタ付真
空パッド質量を加算してください。(P.6真空パッド部手配品番および質量参照)
注2)パッド径、取付け姿勢、ワークによって制限されます。本製品は最大可搬質量
以下でご使用ください。最大可搬質量を超えての吸着・搬送は、エア漏れによ
る真空圧力の低下となる場合があります。
平行ピン 注3)標準供給圧力での当社測定条件による値であり、大気圧(天候、標高等)や測定
パッド取付用フランジ Oリング 方法で変化する場合があります。
(メッシュ付) 注4)真 空発生時の供給圧Pポート直前の圧力を示します。エアの供給能力、配管サ
(ISO9409-1-50 イズ、同時作動する他機器の空気消費等の影響により、真空発生時に真空グリ
-4-M6準拠) ッパのPポート直前の圧力が0.5MPaを下回る場合があります。
内部詳細 破壊弁 供給用パイロット弁
アダプタ付パッド
小形圧力センサ 真空エジェクタ
4
URCapt対応
Page6
パッドバリエーション例
パッドバリエーション例
パッド数量の変更が可能(数量の変更につきましては、取扱説明書をご参照ください。)
パッド1ヶ パッド2ヶ パッド4ヶ
パッド種類の変更が可能(取付け可能なパッドにつきましては、型式表示をご参照ください。)
平形(ø8)、シリコーンゴム ベロウ形(ø20)、NBR 平形薄形(ø16)、NBR 平形(ø32)、シリコーンゴム 平形(ø32)、ウレタンゴム
サクションアシストバルブ
ZP2V Series
(別途手配品)
適合品番:ZP2V-B6-05
ø32、2.5段、シリコーンゴム ø25、5.5段、シリコーンゴム ø25、5.5段、シリコーンゴム
サクションアシストバルブ付
※シリコーン材はFDA(米国食品医薬品局)規格番号:21CFR§177.に適合
■パッドのピッチ変更可能 ■フランジ付パッド単体で使用可能(真空源が外部にある場合)
60(
3 可
0 動 真空ポート用プラグ※2
※
1 範
囲 (M5ねじ穴 深さ4)
5
ø1 0~ 真空圧力供給用
05 70 ワンタッチ管継手※2
) (管接続口径Rc1/8)
1
※
30
(42) ※2 フランジ付パッドとして使用する場合は、
真空圧力供給用ワンタッチ管継手(手配品番: KQ2L08-01NS)
および真空ポート用プラグ(手配品番: M-5P)を別途手配願います。
※1 可 動範囲25〜35(中央部にパッドを取付けた場合)
パッド径によってはパッド同士が干渉しますので、
ご使用ピッチに合わせたパッド径を選定願います。
5
60(
可
動
範
囲
50~
70) (42)
Page7
型式表示方法
型式表示方法
真空パッド部※1 RoHS
ZXP 7 A 01 ZP 20 U N X1
q w e r t y u i ※1 適 用可能パッドは下表をご参照ください。パッド付
の場合、アダプタ付パッドが4ヶ同梱されます。
q ボディサイズ w パッドフランジ形状 フランジ付 フランジなし e 対応メーカ
記号 サイズ 記号 形状 記号 ロボットメーカ
7 75mm A フランジあり 01 UR:3(e), 5(e), 10(e), 16e
(42mm×42mm)
N フランジなし※2 ※2 パ ッド取付用フラ t パッド径
ンジなしを選択し
r パッドシリーズ た場合はお客様に 記号 パッド径 記号 パッド径 真
て取付寸法に合う 08 ø8 25 ø25
記号 シリーズ 空
フランジを製作し 10 ø10 B25 ø25
ZP 基本形 ていただく必要が 13 ø13 B30 ø30 グ
ZP3P フィルム包装ワーク用ベロウ形 あります。 16 ø16 32 ø32 リ
無記号 パッドなし 20 ø20 無記号 パッドなし ッ
パ
y パッド形状 u パッド材質 i アタッチメント※4
記号 形状 記号 材質 記号 アタッチメント
U 平形 N NBR
C 平形リブ付 S シリコーンゴム(白色)※3 無記号 (ガイド)アタッチメント付
B べロウ形 U ウレタンゴム M メッシュアタッチメント付
UT 薄形 F FKM ※4 パッド形状“JT□”のみ適用
J 多段べロウ形 SF シリコーンゴム(青色)※3 マ
JT2 2.5段べロウ形 無記号 パッドなし グ
JT5 5.5段べロウ形 ※3 シリコーン材はFDA(米国食品医薬品 ネ
無記号 パッドなし 局)規格番号:21CFR§177.に適合 ッ
ト
※1 グ
■真空パッド部手配品番および質量 リ
ッ
型式 ZXP7(A,N)01 X1 パ
r t y u i
※ 真空パッドの詳細につきましては、
パッド部個別手配品番 SMCWEBカタログをご参照ください。
アダプタ付パッド
r t y u i パッド材質別質量(g/個) アダプタ単体
パッド パッド パッド パッド アタッチ 品番 真空取出口: パッド単体
N S/SF U F
シリーズ 径 形状 材質 メント おねじM6×1
(NBR)(シリコーン)(ウレタン)(FKM) ( ) エ
ZP 08 U ZPT08U-A6 4 4 4 4 ZP08U ア
ZP 08 B ZPT08B-A6 4 4 4 4 ZP08B グ
ZP 10 UT ZPT10UT-A6 4 4 4 4 ZPT1-A6 ZP10UT リ
ZP 13 UT ZPT13UT-A6 4 4 4 4 ZP13UT ッ
ZP 16 UT ZPT16UT-A6 4 4 4 4 ZP16UT パ
ZP 10 U ZPG10U-7A-X2 7 7 7 7 ZP10U
ZP 13 U ZPG13U-7A-X2 7 7 7 8 ZPT2-7A-X2 ZP13U
ZP 16 U ZPG16U-7A-X2 7 7 7 8 ZP16U
ZP 20 U ZPG20U-7A-X2 9 10 10 10 ZP20U
ZP 25 U ZPG25U-7A-X2 10 10 10 11 ZPT3-7A-X2 ZP25U
ZP 32 U ZPG32U-7A-X2 10 11 11 12 ZP32U
ZP 10 C ZPG10C-7A-X2 7 7 7 7 ZP10C
ZP 13 C ZPG13C-7A-X2 7 7 7 7 ZPT2-7A-X2 ZP13C
ZP 16 C ZPG16C-7A-X2 7 7 7 8 ZP16C
ZP 20 C ZPG20C-7A-X2 9 10 10 11 ZP20C
ZP 25 C ZPG25C-7A-X2 10 10 10 11 ZPT3-7A-X2 ZP25C
ZP 32 C ZPG32C-7A-X2 10 11 11 12 ZP32C
ZP 10 B ZPG10B-7A-X2 7 7 7 8 ZP10B
ZP 13 B ZPG13B-7A-X2 7 8 8 8 ZPT2-7A-X2 ZP13B
ZP 16 B ZPG16B-7A-X2 8 8 8 9 ZP16B
ZP 20 B ZPG20B-7A-X2 11 11 11 13 ZP20B
ZP 25 B ZPG25B-7A-X2 11 12 12 14 ZPT3-7A-X2 ZP25B
ZP 32 B ZPG32B-7A-X2 14 15 15 18 ZP32B
ZP 20 UT ZPG20UT-7A-X2 4 4 4 4 ZPT1-A6 ZP2-20UT
ZP 16 J ZPG16J-7A-X2 8 8 8 9 ZPT2-7A-X2 ZP2-16J
ZP B25 J ZPGB25J-7A-X2 14 15 15 18 ZPT3-7A-X2 ZP2-B25J
ZP B30 J ZPGB30J-7A-X2 18 19 19 25 ZP2-B30J
ZP3P 20 JT2 SF ZP3PG20JT2SF-7A-X2 ― 21 ― ― ZP3P-20JT2SF-W
ZP3P 20 JT2 SF M ZP3PG20JT2SF-M-7A-X2 ― 21 ― ― ZP3PA-T1JT-7A-X2 ZP3P-20JT2SF-WM
ZP3P 32 JT2 SF ZP3PG32JT2SF-7A-X2 ― 48 ― ― ZP3PA-T2JT-7A-X2 ZP3P-32JT2SF-W
ZP3P 32 JT2 SF M ZP3PG32JT2SF-M-7A-X2 ― 48 ― ― ZP3P-32JT2SF-WM
ZP3P 20 JT5 SF ZP3PG20JT5SF-7A-X2 ― 23 ― ― ZP3PA-T1JT-7A-X2 ZP3P-20JT5SF-WG
ZP3P 25 JT5 SF ZP3PG25JT5SF-7A-X2 ― 25 ― ― ZP3P-25JT5SF-WG
ZP3P 32 JT5 SF ZP3PG32JT5SF-7A-X2 ― 54 ― ― ZP3PA-T2JT-7A-X2 ZP3P-32JT5SF-WG
品番□部には材質記号「N」,「 S」,「 U」,「 F」が入ります。
6 A
URCapt対応
Page8
機種選定、外形寸法図
機種選定
排気特性※ 流量特性
-90 90 -90
-80 80 -80
-70 70 -70
-60 量
気消費 60 -60
-50 空 50 -50
-40 40 -40
-30 30 -30
-20 吸込流量 20 -20
-10 10 -10
0 0 0
0 0.1 0.2 0.3 0.4 0.5 0.6 0 5 10 15 20 25
供給圧力[MPa] 吸込流量[L/min(ANR)]
※ サクションアシストバルブ(ZP2V-B6-05)を取付けた場
合は、排気特性が異なります。
詳細は取扱説明書の“8.3 真空パッドの使用上の注意事項”
を参照願います。
外形寸法図
空気圧供給(P)ポート
適用チューブ外径ø6 回路図
破壊弁
4 V114(N.C.)
M8コネクタ 45° 5°
ケーブル
供給用 EXH.
( パイロット弁
ø75 V114(N.C.)
) PE
P
供給弁 小形圧力センサ
PSE541-R04
P
.D.50
P.C
V
5
ø1
0
+0.018 パッド取付用フランジ
6 H8( 0 )深さ5.5 交換手配品番:ZXP7-PFL1-A-X1
ロボット取付用フランジ ø75 (内訳は下図参照。( )は員数を示す)
(ISO9409-1-50-4-M6準拠)
プラグ(真空圧供給ポート用)(1) 平行ピン(1)
Oリング(1) プラグ
(真空圧供給ポート用()1)
プラグ(4) パッド用
D D (アダプタ付 フランジ(1)
パッド取付用フランジ パッド用)
六角穴付ボルト(4)
パッド取付用フランジなしの場合
30 D-D
※
1 31.5 H8(+0.039
ø1 ø 0 )深さ2.5 4×M6×1×8
05 M6×1×8.5
(真空ポート)
D.50
.C.
※1 可 動範囲25〜35(中 P
1 ø6.2深さ6.3
※ ) 央部にパッドを取付
30 ~70 けた場合)パッド径に
囲50 よってはパッド同士
5°
(42) 可動範 が干渉しますので、 4
0( ご使用ピッチに合わ
6 せたパッド径を選定 ※真空ポートにメッシュは付きません。
願います。
※本図の寸法は、パッド取付寸法例として品番:ZXP7A01-ZPB25JS-X1の場合を示します。
7
真空圧力[kPa]
真空圧力
吸込流量[L/min(ANR)]
空気消費量[L/min(ANR)]
2.5
6.5 ø31.5 h8( 0 )
(42) -0.039
81.5 真空圧力[kPa]
93.4
105.4
153.4
70
)
~
囲50
範
(可動
60
)
17
0
(
Page9
製品個別注意事項
ZXP7m01-X1/製品個別注意事項
ご使用の前に必ずお読みください。安全上のご注意ならびに真空用機器/共通注意事項につ
きましては当社ホームページの「SMC製品取扱い注意事項」および「取扱説明書」をご確認く
ださい。https://www.smcworld.com
使用上のご注意 配管上のご注意
注意 注意
qご使用にあたっては真空機器使用上の注意事項を守り、 q配管内のフラッシング
安全に十分配慮してご使用ください。また、吸着する 配管前にエアブロー(フラッシング)または洗浄を十分行い、
ワーク・雰囲気に適合したパッドサイズ、材質の選択 管内の切粉、切削油、ゴミ等を除去してください。 真
を行い、吸着搬送中にワーク落下などの事故が発生し wチューブの装着 空
ないよう、安全対策を行ったうえでご使用願います。
・外 周に傷のないチューブを直角に切断してください。チュ グ
詳しい内容はWEBカタログをご参照ください。
ーブ切断の際はチューブカッタTK-1、2、3、5、6をご使 リ
w仕 様の範囲内でご使用ください。使用外の圧縮空気圧 ッ
用ください。ペンチ、ニッパ、ハサミ等は使用しないでく パ
または電圧を使用すると、製品の性能低下により重大 ださい。チューブカッタ以外の工具で切断すると、チュー
な損傷を引き起こす危険性があります。 ブの切断面が斜めになったり、扁平したりして、確実に装
e製 品開口部から排気エアが出ます。開口部をふさぎ排 着できず、接続後のチューブ抜けやエア漏れの原因となり
気を制限してはなりません。 ます。また、チューブの長さは余裕をとってください。
・チューブを握り、ゆっくりと押し込み、奥まで確実に差し
込んでください。 マ
・奥 まで差し込んだらチューブを軽く引っ張り、抜けないこ グ
取付上のご注意 とを確認してください。奥まで確実に装着されていないと、 ネ
ッ
注意 エア漏れやチューブ抜けの原因となります。 ト
eチューブの離脱 グ
q取 付方法につきましては、取扱説明書をご参照ください。 リ
・リリースブッシュを十分に押し込んでください。この時、 ッ
w締 付トルクを守ってください。締付トルク範囲を越え ツバを均等に押してください。 パ
て締付けると、本体、取付ねじ等が破損する可能性が ・リリースブッシュが戻されないように押えながら、チュー
あります。また、締付トルク範囲未満で締付けた場合、 ブを抜いてください。リリースブッシュの押さえが不十分
本体の取付け位置のズレおよび接続ねじ部の緩みが生 だと逆に食い込みが増し、抜けにくくなります。
じる可能性があります。 ・離 脱したチューブを再利用するときは、チューブの食い込
e製品を落としたり、打ち当てたり、過度の衝撃を加え んだ箇所を切断してご使用ください。チューブの食い込ん
ないでください。 だ箇所をそのまま使用すると、エア漏れの原因やチューブ エ
ア
本体内部、ソレノイドバルブおよび圧力センサ内部が が離脱しにくくなります。 グ
破損し誤動作する可能性があります。 r当社以外のチューブについて リ
r取扱いの際は、本体を持ってください。M8コネクタケ 当社以外のブランドのチューブをご使用になる場合には、チ ッ
パ
ーブルを強く引張ったり、ケーブルを摘んで本体を持 ューブ外径精度が次の仕様を満足することをご確認ください。
ち上げたりしないでください。ソレノイドバルブ、圧 ・ナイロンチューブ ±0.1mm以内
力センサが破損し、故障、誤動作の原因となります。 ・ソフトナイロンチューブ ±0.1mm以内
t使用条件・使用環境により、ボルトが緩む可能性があ ・ポリウレタンチューブ +0.15mm以内、-0.2mm以内
ります。定期的に増し締めをする等のメンテナンスを チューブ外径精度を満たしていない場合は使用しないでくだ
行ってください。 さい。チューブが接続できなかったり、または接続後のエア
漏れやチューブ抜けの原因になります。
t配管について
配線上のご注意
・管継手とチューブにねじれ、引張り、モーメント荷重、振動、
注意 衝撃等がかからないように配管してください。
管継手の破損やチューブのつぶれ、破裂、抜けなどの原因
qM8コネクタケーブルに繰返しの曲げや引張り、力が加 になります。
わらないようしてください。 ・チ ューブを配管後、配管を持って製品本体を持ち上げたりし
w配 線作業を通電中に行わないでください。ソレノイド ないでください。ワンタッチ管継手破損の原因となります。
バルブや圧力センサ内部が破損し誤動作する可能性が 詳細は当社ホームページ(https://www.smcworld.com)の
あります。 共通注意事項をご参照ください。
eM8コネクタケーブルの分解、改造(追加工含む)をしな
いでください。けがや事故の恐れがあります。
8
URCapt対応
Page10
協働ロボット用 マグネットグリッパ MHM-X7400A、特長、型式表示方法、仕様
P協働ロlボuット用g and Play
マグネットグリッパ
UNIVERSAL ROBOTS
UR3(e), UR5(e), UR10(e), UR16e対応
■磁石で重量物を吸着・保持が可能
■穴あき、凹凸および複雑な形状ワークに対応
■コンパクトで高保持力
保持力最大200N(ø25、ワーク厚さ6mm時)
■エア遮断時もワークの保持が可能
■圧縮エア供給チューブ1本、電気配線M8コネクタを接続するだけで動作可能
■ソレノイドバルブ、オートスイッチ、ピストン速度調整機構を一体化
■URCap対応(P.15)
■ 機器構成
UR(e)シリーズ UR(e)シリーズ
接続コネクタ 取付フランジ
エア供給ポート
ソレノイドバルブ
速度調整機構
無接点
オートスイッチ
マグネットグリッパ
MHMシリーズの
詳細はこちら
型式表示方法 仕様
RoHS 作動流体 空気
作動方式 複動形
使用圧力[MPa] 0.2~0.6
保証耐圧力[MPa] 0.9
MHM 25D X7400A 周囲温度および使用流体温度[℃] -10~50(凍結なきこと)
ワーク厚さ:2mm 160
保持力[N]
ワーク厚さ:6mm 200
残存保持力[N] 0.3以下
給油 無給油
質量[g] 590
取付規格 ISO9409-1-50-4-M6
オートスイッチ型式 D-M9P
コネクタ形状 M8 8ピンコネクタ(ソケット)
■同梱部品:取 付用ボルト、位置決めピン、配管用チューブ(ø4×2m)
A 9
Page11
特性、外形寸法図
特性
保持力
保持力グラフは、低炭素鋼平板の理論保持力です。保持力はワーク材質、形状等により
変化しますので選定結果を目安(参考値)とし、実際に吸着試験を行ってご確認ください。
MHM-25
250
200
150
真
100 空
グ
50 リ
ッ
0 パ
0 1 2 3 4 5 6
ワーク厚さ t[ mm]
外形寸法図 マ
25 グ
.
18 ネ
ッ
ト
.5 グ
10 リ
ッ
6 パ
H7( +
0
0 .012
)深
さ
5
45°
0 エ
5.3 5.3 ø63 ø31.5 h7(-0.0 25) ア
グ
16.5 リ
ッ
パ
エア供給ポート
適合チューブ外径ø4
サイレンサ付排気絞り弁
ワーク開放時速度調整用
サイレンサ付排気絞り弁
ワーク保持時速度調整用 4×M4×0.7 深さ7
19
製品取付用ボルト穴 45°
(4箇所)M6用
ø50
ø29 ø36
10
87
保持力 F[ N]
84
26
27 43
8.5
21 変換ケーブル取付位置
114 3
URCapt対応
ø50
Page12
製品個別注意事項
MHM-X7400A/製品個別注意事項
ご使用の前に必ずお読みください。安全上のご注意につきましては裏表紙、アクチュエータ/共通注意事項
ならびにマグネットグリッパの製品個別注意事項、オートスイッチ/共通注意事項につきましては当社ホーム
ページの「SMC製品取扱い注意事項」および「取扱説明書」をご確認ください。https://www.smcworld.com
使用上のご注意 配管上のご注意
注意 注意
qマグネットグリッパ外部が加圧されている場合、ロッ q配管内のフラッシング
ドパッキン部からシリンダ内部へエアが流入する可能 配管前にエアブロー(フラッシング)または洗浄を十分行い、
性があります。(例:チャンバ内など) 管内の切粉、切削油、ゴミ等を除去してください。
w本体には磁石が内蔵されていますので、磁気ディスク、 wチューブの装着
磁気カード、磁気テープなどは近づけないでください。 ・外 周に傷のないチューブを直角に切断してください。チュ
データが消去されてしまうことがあります。 ーブ切断の際はチューブカッタTK-1、2、3、5、6をご使
用ください。ペンチ、ニッパ、ハサミ等は使用しないでく
ださい。チューブカッタ以外の工具で切断すると、チュー
ブの切断面が斜めになったり、扁平したりして、確実に装
着できず、接続後のチューブ抜けやエア漏れの原因となり
ます。また、チューブの長さは余裕をとってください。
・チューブを握り、ゆっくりと押し込み、奥まで確実に差し
込んでください。
・奥 まで差し込んだらチューブを軽く引っ張り、抜けないこ
取付上のご注意 とを確認してください。奥まで確実に装着されていないと、
注意 エア漏れやチューブ抜けの原因となります。
eチューブの離脱
q取 付方法につきましては、取扱説明書をご参照ください。
・リ リースブッシュを十分に押し込んでください。この時、
w締付トルクを守ってください。締付トルク範囲を越え ツバを均等に押してください。
て締付けると、本体、取付ねじ等が破損する可能性が ・リ リースブッシュが戻されないように押えながら、チュー
あります。また、締付トルク範囲未満で締付けた場合、 ブを抜いてください。リリースブッシュの押さえが不十分
本体の取付け位置のズレおよび接続ねじ部の緩みが生 だと逆に食い込みが増し、抜けにくくなります。
じる可能性があります。 ・離 脱したチューブを再利用するときは、チューブの食い込
e製品を落としたり、打ち当てたり、過度の衝撃を加え んだ箇所を切断してご使用ください。チューブの食い込ん
ないでください。 だ箇所をそのまま使用すると、エア漏れの原因やチューブ
本体内部、ソレノイドバルブおよびオートスイッチ内 が離脱しにくくなります。
部が破損し誤動作する可能性があります。 r当社以外のチューブについて
r取扱いの際は、本体を持ってください。M8コネクタケ 当社以外のブランドのチューブをご使用になる場合には、チ
ーブルを強く引張ったり、ケーブルを摘んで本体を持 ューブ外径精度が次の仕様を満足することをご確認ください。
ち上げたりしないでください。ソレノイドバルブ、オ ・ナイロンチューブ ±0.1mm以内
ートスイッチが破損し、故障、誤動作の原因となります。 ・ソフトナイロンチューブ ±0.1mm以内
t使 用条件・使用環境により、ボルトが緩む可能性があ ・ポリウレタンチューブ +0.15mm以内、-0.2mm以内
ります。定期的に増し締めをする等のメンテナンスを チューブ外径精度を満たしていない場合は使用しないでくだ
行ってください。 さい。チューブが接続できなかったり、または接続後のエア
漏れやチューブ抜けの原因になります。
t配管について
配線上のご注意
・管継手とチューブにねじれ、引張り、モーメント荷重、振動、
注意 衝撃等がかからないように配管してください。
管継手の破損やチューブのつぶれ、破裂、抜けなどの原因
qM8コネクタケーブルに繰返しの曲げや引張り、力が加 になります。
わらないようしてください。 ・チ ューブを配管後、配管を持って製品本体を持ち上げたりし
w配線作業を通電中に行わないでください。ソレノイドバ ないでください。ワンタッチ管継手破損の原因となります。
ルブやオートスイッチ内部が破損し誤動作する可能性 詳細は当社ホームページ(https://www.smcworld.com)の
があります。 共通注意事項をご参照ください。
eM8コネクタケーブルの分解、改造(追加工含む)をしな
いでください。けがや事故の恐れがあります。
11
Page13
協働ロボット用 エアグリッパ JMHZ2-X7400B、特長、型式表示方法、仕様
P協働ロlボuット用g and Play
エアグリッパ
UNIVERSAL ROBOTS
UR3(e), UR5(e), UR10(e), UR16eシリーズ対応
真
空
■エア駆動により、小形・軽量でも高把持力 グ
リ
■ガイド一体構造により高剛性・高精度を実現したエアグリッパ ッ
パ
高精度リニアガイド採用 1ランク上のリニアガイドを採用
繰返し精度:±0.01mm 剛性の向上(既存製品MHZ2の同サイズと比較)
■ 圧縮エア供給チューブ1本、電気配線M8コネクタを接続するだけで動作可能 マ
■ソレノイドバルブ、速度調整機構、オートスイッチを一体化 グ
■URCap対応(P.15) ネ
ッ
■ 分割式保護カバーによりグリッパのメンテナンスが容易 ト
グ
ユーザー専用アタッチメントを取外さなくてもグリッパのメンテナンスが可能 リ
ッ
■ 機器構成 パ
UR(e)シリーズ
取付フランジ
UR(e)シリーズ
接続コネクタ
オートスイッチ側
ソレノイドバルブ エ
ア
グ
リ
エア供給ポート ッ
パ
無接点 保護カバー
オートスイッチ (スイッチ側) フィンガ開閉
速度調整機構
エアグリッパ
保護カバー
アタッチメント付属 (バルブ側)
型式表示方法 仕様
RoHS シリンダ内径[mm] 16
使用流体 空気
作動方式 複動形
JMHZ 2 16D X7400 B 使用圧力[MPa] 0.1~0.7
繰返し精度[mm] ±0.01
把持力 外径把持力 32.7
フィンガ1ヶ当たり実効値[N]内径把持力 43.5
開閉ストローク(両側)[mm] 10
質量[g] 430
取付規格 ISO9409-1-50-4-M6
オートスイッチ型式 D-M9P-5
コネクタ形状 M8 8ピンコネクタ(ソケット)
■同梱部品:取付用ボルト、位置決めピン、配管用チューブ(ø4×2m)
12 A
URCapt対応
Page14
特性、外形寸法図
特性
把持力
◦実効把持力の表し方
下のグラフの実効把持力は、下図に示すように2ヶのフィンガおよびアタッチメントがすべてのワークに接している状態での1つのフィンガの
推力:Fとして表しています。
外径把持力 内径把持力
F 50 F 80
圧力0.7MPa
0.6MPa 圧力0.7MPa
40
60
0.5MPa 0.6MPa
30 0.4MPa 0.5MPa
40 0.4MPa
20 0.3MPa
0.3MPa
0.2MPa 20 0.2MPa
L 10 L
0.1MPa 0.1MPa
0 0
F 0 20 40 60 80 100 120 F 0 20 40 60 80 100 120
把持点 L mm 把持点 L mm
把持点
◦ワークの把持点は、使用圧力ごとにオーバーハング量:Hが下のグラフの範囲内になるようにご使用ください。
◦ワークの把持点を制限範囲外にすると、エアグリッパの寿命に悪影響を及ぼす原因となります。
外径把持 内径把持
120 圧 120
力 圧
100 0.1 100 力
~ 0.6MPa 0
0 .1 0.3MPa
.4 0.3 ,
80 M M 80 0
P P 0.7MPa 0 .2
0. a a .4 MPa 0.5MPa
60 5M 60 MP
L Pa L a 0.6MPa
40 40 0.7MPa
20 20
0 0
0 20 40 60 80 100 120 0 20 40 60 80 100 120
把持点 L mm 把持点 L mm
外形寸法図
45° 45°
製品取付用ボルト穴(4箇所)M6用
ø50
60 10.5 18.25 8
31.5 f7(-0.025
ø -0.050) 2.5
ø63
33.6 37
エア供給ポート
適合チューブ 14 サイレンサ付 サイレンサ付
外径ø4 排気絞り弁 排気絞り弁
フィンガ開き側 フィンガ閉じ側
速度調整用 速度調整用
カバー取付用
アタッチメント ボルト穴
取付用ボルト穴 (4箇所)
(4箇所)M3用 25
12.5 開時27 9.5 33.1 50
閉時17 11.5
13
H
5.1
オーバーハング量 H mm 把持力 N
7 6.3 28.6 3
49.2 85.8(把持点L基準点)
(135)
88.1
59.6 6 H7(+0.012
0 )深さ5
15 8.5
(変換ケーブル取付位置)
H
19
31.5
オーバーハング量 H mm 把持力 N
32.6
Page15
製品個別注意事項
JMHZ2-X7400B/製品個別注意事項
ご使用の前に必ずお読みください。安全上のご注意につきましては裏表紙、エアチャック/共通注意事項な
らびにエアチャックの製品個別注意事項、オートスイッチ/共通注意事項につきましては当社ホームページ
の「SMC製品取扱い注意事項」および「取扱説明書」をご確認ください。https://www.smcworld.com
使用上のご注意 配管上のご注意
注意 注意
qフィンガ・ガイドにはマルテンサイト系ステンレスを q配管内のフラッシング
使用していますが、オーステナイト系ステンレスと比 配管前にエアブロー(フラッシング)または洗浄を十分行い、
較すると耐食性は劣るのでご注意ください。特に結露 管内の切粉、切削油、ゴミ等を除去してください。 真
等で水滴が付着するような環境では錆が発生する場合 wチューブの装着 空
があります。
・外 周に傷のないチューブを直角に切断してください。チュ グ
w本 フィンガには有限軌道ガイドを使用しています。こ ーブ切断の際はチューブカッタTK-1、2、3、5、6をご使 リ
のため、移動や回転などによる慣性力が加わる場合は、 ッ
用ください。ペンチ、ニッパ、ハサミ等は使用しないでく パ
鋼球が寄り、摺動抵抗の増加や精度の低下を生じる場 ださい。チューブカッタ以外の工具で切断すると、チュー
合があります。このような場合は、フルストローク作 ブの切断面が斜めになったり、扁平したりして、確実に装
動を行ってください。 着できず、接続後のチューブ抜けやエア漏れの原因となり
eア タッチメントの取付け・取外しを行う際は、締付ト ます。また、チューブの長さは余裕をとってください。
ルク:0.59Nで取付けてください。アタッチメントの ・チューブを握り、ゆっくりと押し込み、奥まで確実に差し
質量はフィンガ片側当たり70g程度までを目安として 込んでください。 マ
ください。 ・奥まで差し込んだらチューブを軽く引っ張り、抜けないこ グ
とを確認してください。奥まで確実に装着されていないと、 ネ
ッ
エア漏れやチューブ抜けの原因となります。 ト
取付上のご注意 eチューブの離脱 グ
リ
・リリースブッシュを十分に押し込んでください。この時、
注意 ッ
ツバを均等に押してください。 パ
q取 付方法につきましては、取扱説明書をご参照ください。 ・リ リースブッシュが戻されないように押えながら、チュー
ブを抜いてください。リリースブッシュの押さえが不十分
w締 付トルクを守ってください。締付トルク範囲を越え だと逆に食い込みが増し、抜けにくくなります。
て締付けると、本体、取付ねじ等が破損する可能性が ・離脱したチューブを再利用するときは、チューブの食い込
あります。また、締付トルク範囲未満で締付けた場合、 んだ箇所を切断してご使用ください。チューブの食い込ん
本体の取付け位置のズレおよび接続ねじ部の緩みが生 だ箇所をそのまま使用すると、エア漏れの原因やチューブ エ
じる可能性があります。 ア
が離脱しにくくなります。 グ
e製 品を落としたり、打ち当てたり、過度の衝撃を加え r当社以外のチューブについて リ
ないでください。 当社以外のブランドのチューブをご使用になる場合には、チ ッ
本体内部、ソレノイドバルブおよびオートスイッチ内 パ
ューブ外径精度が次の仕様を満足することをご確認ください。
部が破損し誤動作する可能性があります。
・ナイロンチューブ ±0.1mm以内
r取 扱いの際は、本体を持ってください。M8コネクタケ ・ソフトナイロンチューブ ±0.1mm以内
ーブルを強く引張ったり、ケーブルを摘んで本体を持
ち上げたりしないでください。ソレノイドバルブ、オ ・ポリウレタンチューブ +0.15mm以内、-0.2mm以内
ートスイッチが破損し、故障、誤動作の原因となります。 チューブ外径精度を満たしていない場合は使用しないでくだ
さい。チューブが接続できなかったり、または接続後のエア
t使用条件・使用環境により、ボルトが緩む可能性があ 漏れやチューブ抜けの原因になります。
ります。定期的に増し締めをする等のメンテナンスを
行ってください。 t配管について
・管継手とチューブにねじれ、引張り、モーメント荷重、振動、
衝撃等がかからないように配管してください。
配線上のご注意 管継手の破損やチューブのつぶれ、破裂、抜けなどの原因
になります。
注意 ・チ ューブを配管後、配管を持って製品本体を持ち上げたりし
ないでください。ワンタッチ管継手破損の原因となります。
qM8コネクタケーブルに繰返しの曲げや引張り、力が加 詳細は当社ホームページ(https://www.smcworld.com)の
わらないようしてください。 共通注意事項をご参照ください。
w配線作業を通電中に行わないでください。ソレノイドバ
ルブやオートスイッチ内部が破損し誤動作する可能性
があります。
eM8コネクタケーブルの分解、改造(追加工含む)をしな
いでください。けがや事故の恐れがあります。
14
URCapt対応
Page16
URCap対応
真空グリッパ/ZXP7□01-X1
マグネットグリッパ/MHM-X7400A
エアグリッパ/JMHZ2-X7400B
URCapソフトの
詳細はこちら
URCap対応
https://www.smcworld.com/products/ja/get.do?type=GUIDE&id=JMHZ2-16D-X7400B&_qr=catalog
簡単なプログラミング
ユニバーサルロボット認証済み専用ソフトURCapを使い、
ティーチペンダントで直感的な操作でSMC製グリッパの各種動作、センサ信号を簡単に組込むことが可能。
URCapソフトを保存したUSBメモリをティーチペンダントに差込むことで簡単にソフトのインストールが可能。
※URCapソフトはホームページよりダウンロードして、お手持ちのUSBメモリに保存してください。
ティーチペンダント
コントロールボックス
ロボットアーム USBメモリ
※お客様用意
(URCapソフト保存)
エアグリッパ プログラム画面
15
Page17
安全上のご注意
安全上のご注意 ここに示した注意事項は、製品を安全に正しくお使いいただき、あなたや他の人々への危害や損害
を未然に防止するためのものです。これらの事項は、危害や損害の大きさと切迫の程度を明示する
ために、「注意」「警告」「危険」の三つに区分されています。いずれも安全に関する重要な内容です
から、国際規格(ISO/IEC)、日本産業規格(JIS)※1)およびその他の安全法規※2)に加えて、必ず守っ
てください。
※1)ISO 4414: Pneumatic fluid power -- General rules relating to systems.
注意:取扱いを誤った時に、人が傷害を負う危険が想定され ISO 4413: Hydraulic fluid power -- General rules relating to systems.
る時、および物的損害のみの発生が想定されるもの。 IEC 60204-1: Safety of machinery -- Electrical equipment of machines.
(Part 1: General requirements)
警告:取扱いを誤った時に、人が死亡もしくは重傷を負う可 ISO 10218: Manipulating industrial robots -Safety.
能性が想定されるもの。 JIS B 8370: 空気圧システム通則
JIS B 8361: 油圧システム通則
危険:切迫した危険の状態で、回避しないと死亡もしくは重 JIS B 9960-1: 機械類の安全性-機械の電気装置(第1部:一般要求事項)
傷を負う可能性が想定されるもの。 JIS B 8433: 産業用マニピュレーティングロボット-安全性 など
※2)労働安全衛生法 など
警告 注意
q当社製品の適合性の決定は、システムの設計者または仕様を決定 当社の製品は、製造業向けとして提供しています。
する人が判断してください。 ここに掲載されている当社の製品は、主に製造業を目的とした平和利用向け
ここに掲載されている製品は、使用される条件が多様なため、そのシ に提供しています。製造業以外でのご使用を検討される場合には、当社にご
ステムへの適合性の決定は、システムの設計者または仕様を決定する 相談いただき必要に応じて仕様書の取り交わし、契約などを行ってください。
人が、必要に応じて分析やテストを行ってから決定してください。 ご不明な点などがありましたら、当社最寄りの営業拠点にお問合せ願います。
このシステムの所期の性能、安全性の保証は、システムの適合性を決
定した人の責任になります。 保証および免責事項/適合用途の条件
常に最新の製品カタログや資料により、仕様の全ての内容を検討し、
機器の故障の可能性についての状況を考慮してシステムを構成してく 製品をご使用いただく際、以下の「保証および免責事項」、「適合用途の条件」
ださい。 を適用させていただきます。
下記内容をご確認いただき、ご承諾のうえ当社製品をご使用ください。
w当社製品は、充分な知識と経験を持った人が取扱ってください。 『保証および免責事項』
ここに掲載されている製品は、取扱いを誤ると安全性が損なわれます。
機械・装置の組立てや操作、メンテナンスなどは充分な知識と経験を q当社製品についての保証期間は、使用開始から1年以内、もしく
持った人が行ってください。 は納入後1.5年以内、いずれか早期に到達する期間です。※3)
e安全を確認するまでは、機械・装置の取扱い、機器の取外しを絶 また製品には、耐久回数、走行距離、交換部品などを定めているも
対に行わないでください。 のがありますので、当社最寄りの営業拠点にご確認ください。
1.機械・装置の点検や整備は、被駆動物体の落下防止処置や暴走防止処 w保証期間中において当社の責による故障や損傷が明らかになった
置などがなされていることを確認してから行ってください。 場合には、代替品または必要な交換部品の提供を行わせていただ
2.製品を取外す時は、上記の安全処置がとられていることの確認を行い、 きます。なお、ここでの保証は、当社製品単体の保証を意味する
エネルギー源と該当する設備の電源を遮断するなど、システムの安全 もので、当社製品の故障により誘発される損害は、保証の対象範
を確保すると共に、使用機器の製品個別注意事項を参照、理解してか 囲から除外します。
ら行ってください。 eその他製品個別の保証および免責事項も参照、ご理解の上、ご使
3.機械・装置を再起動する場合は、予想外の動作・誤動作が発生しても 用ください。
対処できるようにしてください。 ※3)真空パッドは、使用開始から1年以内の保証期間を適用できません。
r次に示すような条件や環境で使用する場合は、安全対策への格別 真空パッドは消耗部品であり、製品保証期間は納入後1年です。ただし、
のご配慮をいただくと共に、あらかじめ当社へご相談くださるよ 保証期間内であっても、真空パッドを使用したことによる摩耗、または
ゴム材質の劣化が原因の場合には、製品保証の適用範囲外となります。
うお願い致します。
1.明記されている仕様以外の条件や環境、屋外や直射日光が当たる場所 『適合用途の条件』
での使用。
2.原子力、鉄道、航空、宇宙機器、船舶、車両、軍用、医療機器、飲料・ 海外へ輸出される場合には、経済産業省が定める法令(外国為替およ
食料に触れる機器、燃焼装置、娯楽機器、緊急遮断回路、プレス用ク び外国貿易法)、手続きを必ず守ってください。
ラッチ・ブレーキ回路、安全機器などへの使用、およびカタログの標
準仕様に合わない用途の場合。 注意
3.人や財産に大きな影響をおよぼすことが予想され、特に安全が要求さ
れる用途への使用。 当社製品は、法定計量器として使用できません。
4.インターロック回路に使用する場合は、故障に備えて機械式の保護機 当社が製造、販売している製品は、各国計量法に関連した型式認証試験や検定
能を設けるなどの2重インターロック方式にしてください。また、定 などを受けた計量器、計測器ではありません。このため、当社製品は各国計量
期的に点検し正常に動作していることの確認を行ってください。 法で定められた取引もしくは証明などを目的とした用途では使用できません。
安全に関するご注意 ご使用の際は「SMC製品取扱い注意事項」(M-03-3)および「取扱説明書」をご確認のうえ、正しくお使いください。